-
学习笔记20--汽车运动控制
本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》。
此专栏是关于《自动驾驶汽车决策与控制》书籍的笔记.
3.汽车运动控制
3.1 概述
- 运动控制指根据当前周围环境和车位位置、姿态、车速等信息按照一定的逻辑做出决策,并分别向油门、制动及转向等执行系统发出控制指令;
- 运动控制主要研究内容包括:横向控制、纵向控制和横纵协同控制;
- 横向控制:主要研究自动驾驶汽车的路径跟踪能力,即如何控制汽车沿规划的路径行驶,并保证汽车的行驶安全性、平稳性与乘坐舒适性;
- 纵向控制:主要研究自动驾驶汽车的速度跟踪能力,控制汽车按照预定的速度巡航或与前方动态目标保持一定的距离;
- 横向控制系统的实现主要依靠预瞄跟随控制、前馈控制和反馈控制;
3.2 预瞄跟随控制
-
预瞄跟随控制原理是根据驾驶员操纵特征提出的;
-
驾驶员基于外界环境、道路信息及当前汽车的运动状态进行汽车操纵,预测汽车当前实际位置与道路中心线之间的侧向位移偏差和航向偏差的大小,从而转动方向盘使预测偏差为零,该预测偏差叫做预瞄侧向位移偏差或预瞄航向偏差;
-
驾驶员依据预瞄偏差大小转动对应的方向盘角度,从而完成对期望行驶路径的跟踪;
-
综上,控制系统依据汽车行驶参数、道路曲率、预瞄偏差和汽车的动力学模型得出所需方向盘转角或前轮转角,从而实现对期望目标路径的跟踪;
-
预瞄跟随控制结构如下图所示:
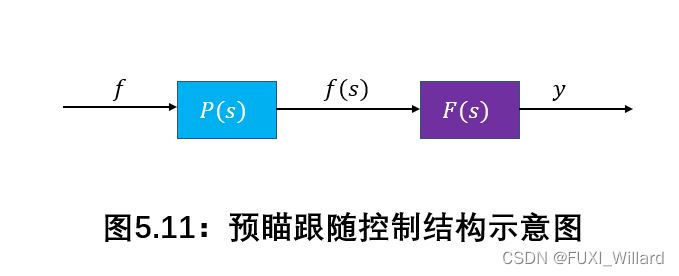
系统传递函数为:
y / f ( s ) = P ( s ) ⋅ F ( s ) (1) y/f(s)=P(s)·F(s)\tag{1} y/f(s)=P(s)⋅F(s)(1)
其中: P ( s ) P(s) P(s)为预瞄环节传递函数, F ( s ) F(s) F(s)为跟随环节传递函数;在低频域条件下,理想状态下的预瞄跟随控制系统满足:
P ( s ) ⋅ F ( s ) ≈ 1 (2) P(s)·F(s)≈1\tag{2} P(s)⋅F(s)≈1(2)
3.3 前馈控制
-
前馈控制系统是根据扰动或给定值的变化按补偿原理来工作的控制系统;
-
特点是当扰动产生后,被控量还未变化前,根据扰动作用的大小进行控制,以补偿扰动作用对被控变量的影响;
-
自动驾驶汽车的一般状态方程:
x ˙ = A x + B u (3) \dot{x}=Ax+Bu\tag{3} x˙=Ax+Bu(3)
其中: u u u为前轮转角 δ \delta δ,考虑到道路曲率 φ ˙ d e s \dot{\varphi}_{des} φ˙des的存在,式(3)改写为:
x ˙ = A x + B δ + B φ ˙ d e s (4) \dot{x}=Ax+B\delta+B\dot{\varphi}_{des}\tag{4} x˙=Ax+Bδ+Bφ˙des(4)
3.4 反馈控制
-
反馈控制:指将系统的输出信息返回到输入端,与输入信息进行比较,利用二者的偏差进行控制的过程;
-
反馈控制实际是用过去的情况来指导现在和将来;在控制系统中,如果返回的信息的作用是抵消输入信息,称为负反馈,负反馈可以使系统趋于稳定,若其作用是增强输入信息,则称为正反馈,正反馈可以使信号得到增强;
-
为满足控制系统的控制要求,并使控制系统构成全状态反馈控制系统,需要设计反馈控制律:
u = − K x (5) u=-Kx\tag{5} u=−Kx(5)
3.5 横向控制
- 横向控制主要控制航向,通过改变方向盘扭矩或角度的大小等,使汽车按照想要的航向行驶;
- 建立自动驾驶汽车横向控制系统,先要搭建道路-汽车动力学控制模型,根据最优预瞄驾驶员原理与模型设计侧向加速度最优跟踪PD控制器,从而得到汽车横向控制系统;然后,以汽车纵向速度及道路曲率为控制器输入,预瞄距离为控制器输出,构建预瞄距离自动选择的最优控制器,从而实现汽车横向运动的自适应预瞄最优控制,如下图所示:

3.6 纵向控制
- 纵向控制主要为速度控制,通过控制车、油门等实现对车速的控制;
- 自动驾驶汽车纵向控制的控制原理是基于油门踏板与制动踏板的控制与协调切换,从而控制汽车加速、减速,实现对自动驾驶汽车纵向期望速度跟踪与控制;
- 自动驾驶汽车纵向控制系统分为两种模式:直接式与分层式;
- 直接设计控制器对控制参数进行调控的称作直接控制法;分成两个或多个控制器的称为分层结构控制法;
- 直接式针对单个控制对象,不考虑控制对象与其他汽车的相对位置;分层式考虑汽车在行驶队列的转向、加速与制动等行为,以其他汽车作为参考进行控制;
两种模式的相关介绍:
-
纵向控制的两种模式
直接式运动控制是通过纵向控制器直接控制期望制动压力和油门开度,从而实现对跟随速度和跟随减速度直接控制,具有快速响应等特点,具体结构如下图所示:

基于分层控制结构,根据控制目标的不同,将自动驾驶汽车纵向控制系统分为上位控制器和下位控制器进行单独设计,具体结构如下图所示:
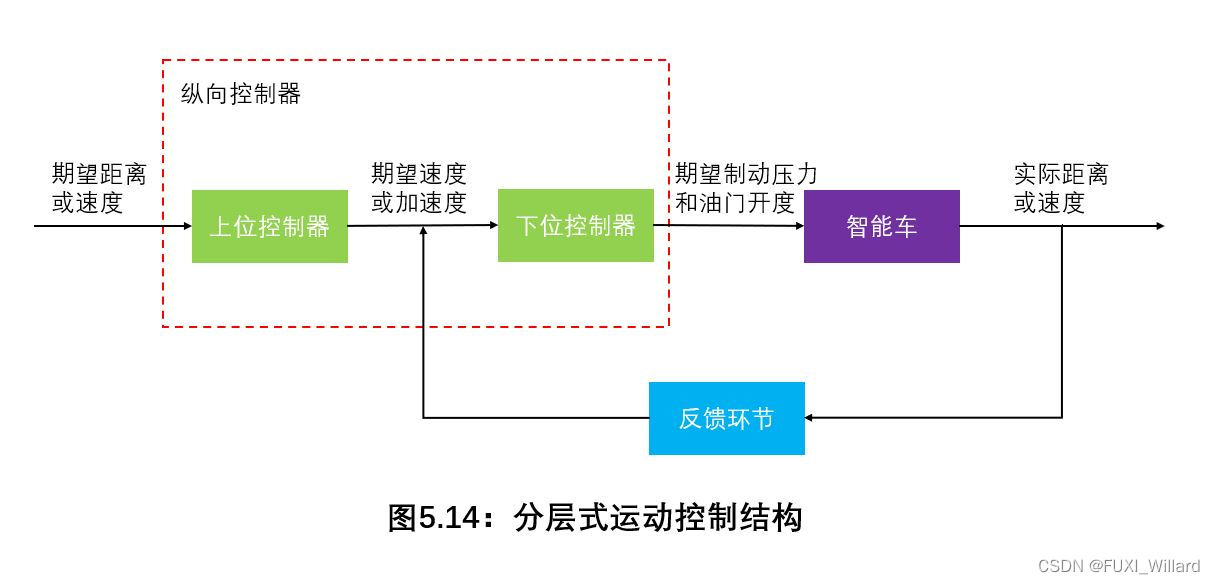
上位控制器控制策略设计的目的是产生期望车速或期望加速度;下位控制器接收上位控制器产生的期望状态值,并按照控制算法产生期望的制动压力值与期望油门开度值,从而实现汽车纵向车间距离或速度跟踪控制的功能; -
直接式运动控制实现过程
为了实现汽车纵向控制,通常需要考虑"位移-速度闭环PID控制器"和"速度-加速度闭环PID控制器",且需要对油门控制器、制动控制器及两者的切换策略进行设计;然后通过PI控制器参数调节来优化控制器的性能,同时优化油门、制动切换控制逻辑,协调油门与制动动作来实现对期望目标车速的跟踪;纵向控制结构如下图所示:
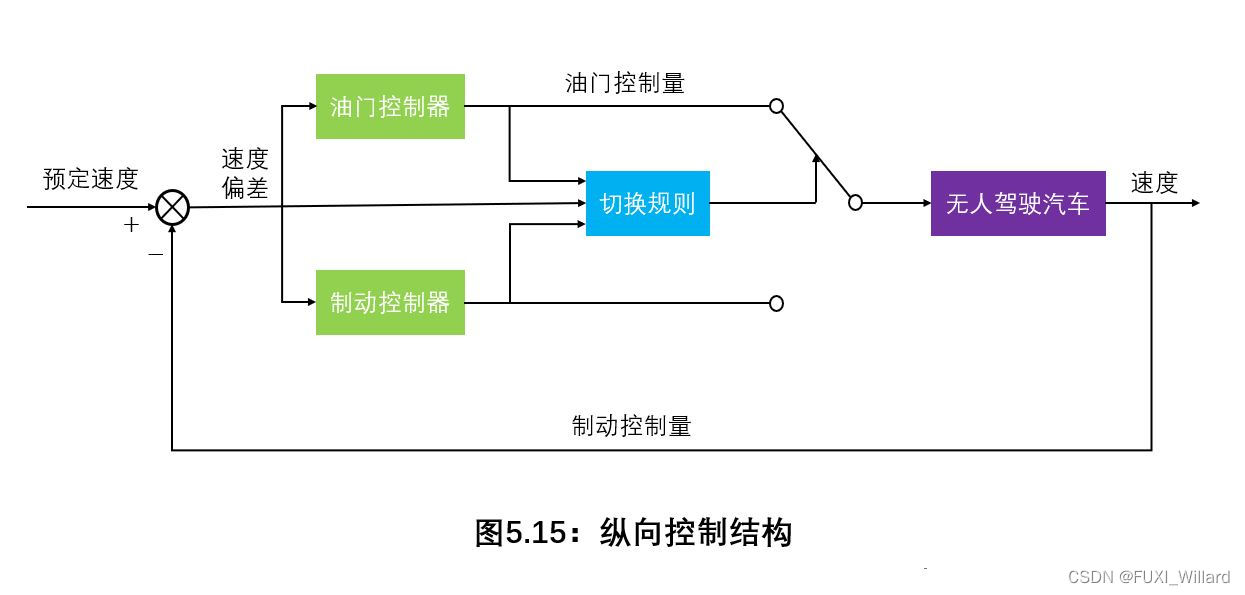
汽车在行驶过程中,同时踩下油门踏板和制动踏板会损坏汽车动力系统和传动系统,因此切换逻辑要保证以下两点:- 在油门踏板踩下时,需要释放制动踏板,在制动踏板踩下时,需要释放油门踏板,避免油门踏板和制动踏板同时工作;
- 避免油门、制动踏板频繁切换;
3.7 横纵向协同控制
为实现横纵向控制器在实际情况下的控制效果,需要将横向控制与纵向控制协同起来并优化控制参数,构建自动驾驶汽车综合控制系统;该综合控制系统用于实现自动驾驶汽车的横纵向耦合运动控制,横纵向协同控制架构包括决策层、控制层、模型层,如下图所示:

- 决策层:根据视觉感知系统感知的汽车外界道路环境信息与汽车行驶状态信息,对汽车的行驶路径进行规划,形成期望运动轨迹,并根据期望运动轨迹选择期望速度;
- 控制层:基于决策层得到的期望路径与期望车速输入,经过控制系统的分析与运算得到理论的前轮转角输出、油门控制输出及制动器控制输出信号,作用于自动驾驶汽车,保证自动驾驶汽车跟踪期望速度沿着期望轨迹行驶;
- 模型层:对于横纵向运动综合控制系统,运用数学知识建立整车横纵向数学模型;
- 自动驾驶汽车的纵向速度既是横向控制器的状态量输入又是纵向控制器的状态量输入,横向控制系统的前轮转角与车速有关,纵向控制系统的模糊控制器速度偏差输入与加速度偏差输入与车速有关,汽车的纵向车速成为连接横向控制系统与纵向控制系统的关键点;
-
相关阅读:
Three.js——骨骼动画
【理论】车辆双轴振动模型(二)
顶刊BMJ杂志推荐方法学文章!断点回归方法介绍
数据库自动收缩造成的阻塞
图论基础知识 并查集/例题
如何让彩色网页变灰
[数据结构] 串与KMP算法详解
记一次 .NET某施工建模软件 卡死分析
uniapp 对video视频组件嵌套倍速按钮
华为设备配置攻击溯源命令
- 原文地址:https://blog.csdn.net/qq_39032096/article/details/126312652