-
内点法(interior point method)求解二次规划,附python代码
内点法介绍这篇博文写的很好https://blog.csdn.net/dymodi/article/details/46441783,在这篇文章的基础上,本文给出障碍函数法代码和一个算例。
障碍函数内点法的主要思想是:把不等式约束放进目标函数里。以下面的问题为例
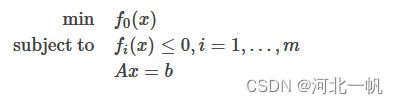
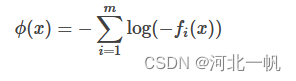
不等式约束放进目标函数,变成如下形式:
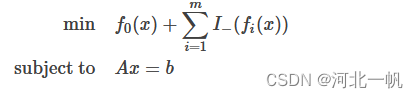
当
 时,函数
时,函数 特别大,我们希望这个函数像下图红虚线的样子,
特别大,我们希望这个函数像下图红虚线的样子,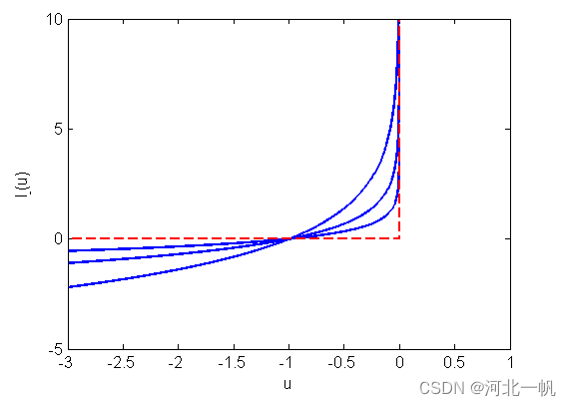
但那样不可导,所以我们用如下形式的函数去近似。

图中,
 时由下往上的的3根蓝线,对应的
时由下往上的的3根蓝线,对应的 值是依次增大。障碍函数内点法在迭代的时候,t初值给一个小值,t逐渐增大,使可行域越来越接近红虚线。
值是依次增大。障碍函数内点法在迭代的时候,t初值给一个小值,t逐渐增大,使可行域越来越接近红虚线。在 t 的每一步迭代中,原问题转化为如下子问题:
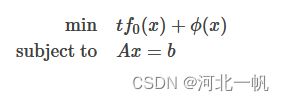
求解子问题,得到一个最优解
 ,这个是 t 下一步迭代的x初值。
,这个是 t 下一步迭代的x初值。子问题的求解可以用拉格朗日乘子法。
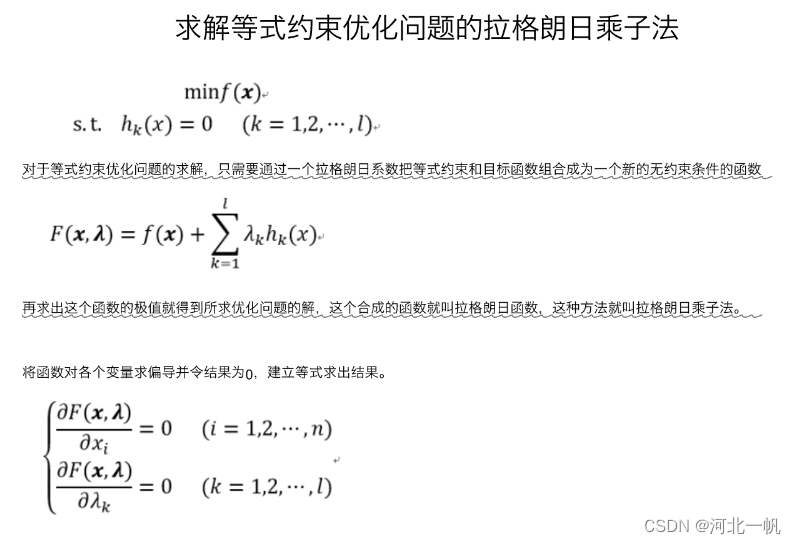
拉格朗日乘子法中,
 通过牛顿迭代法(Newton-Raphson method)求解。
通过牛顿迭代法(Newton-Raphson method)求解。牛顿迭代法解非线性方程组

H(f)是Hessian矩阵。
得到子问题的最优解
,然后继续迭代 t障碍函数内点法的算法步骤如下:(节选自Stephen Boyd的《Convex Optimization》)
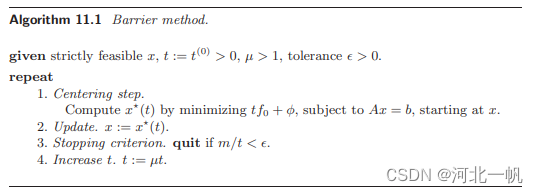
迭代终止条件中的m就是不等式约束的个数那个m,为什么以这个条件为终止的原因,参见文章开头提到的博客,Boyd的书里也有详细的证明,是通过原问题的对偶问题证明得到的。
 是一个大于0的参数,使t每次迭代增大。
是一个大于0的参数,使t每次迭代增大。算例:
求解如下二次规划问题(解为 x1=0.5,x2=2.25):
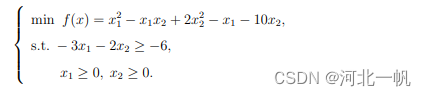
转化为如下子问题:

完整python代码如下:
- import numpy as np
- import time
- def grad_f(t, x1, x2):
- return np.array([[t * (2 * x1 - x2 - 1) + 3 / (6 - 3 * x1 - 2 * x2) - 1 / x1],
- [t * (-1 * x1 + 4 * x2 - 10) + 2 / (6 - 3 * x1 - 2 * x2) - 1 / x2]])
- def Hessian_f(t, x1, x2):
- return np.array([[2*t - 9 / pow((6-3*x1-2*x2), 2) + 1 / pow(x1, 2), -t - 6 / pow((6-3*x1-2*x2), 2)],
- [-t - 6 / pow((6-3*x1-2*x2), 2), 4*t - 4 / pow((6-3*x1-2*x2), 2) + 1 / pow(x2, 2)]])
- def NewtonRaphson(t, x1, x2):
- gf = grad_f(t, x1, x2)
- Hf = Hessian_f(t, x1, x2)
- Hf_inv = np.linalg.inv(Hf)
- deltaX = 0.1 * np.matmul(Hf_inv, gf)
- res = np.linalg.norm(deltaX, 2)
- return x1 - deltaX[0, 0], x2 - deltaX[1, 0], res
- if __name__ == "__main__":
- time_start = time.time()
- t = 2
- x1 = 1
- x2 = 2
- while True:
- while True:
- x1, x2, res = NewtonRaphson(t, x1, x2)
- if res < 0.0001:
- break
- # print(x1, x2, res)
- # print("------")
- if 3.0 / t < 0.0001:
- time_end = time.time()
- print('consume time:', time_end - time_start)
- print("t:{}, x1:{}, x2:{}".format(t, x1, x2))
- break
- t = 2 * t
-
相关阅读:
只知道sort?C++序列操作函数最全总结
Java序列化与反序列化
面试官:你说你用过Dubbo,那你说说看Dubbo的SPI
【图像识别】基于hog特征的机器学习交通标识识别附matlab代码
使用D435i+Avia跑Fast-LIVO
包管理工具--》发布一个自己的npm包
Go错误处理方式真的不好吗?
六大排序算法(Java版):从插入排序到快速排序(含图解)
质数的判定和质因数分解
GOM跟GEE登陆器列表文件加密教程
- 原文地址:https://blog.csdn.net/qq_41816368/article/details/125888172
