-
【2021-TITS】Deep Learning in Lane Marking Detection: A Survey
概述
回顾了针对路面标线的深度学习算法,主要分析了他们的网络架构及优化目标;此外还总结了现有车道标线相关的数据集,评价基准及常见的数据处理技术
- Paper
Code
总结
- 创新点:
- 1.总结深度学习网络架构、优化目标
- 2.总结了相关现有数据集
- 不足:
- 分析:
- 结论:综述总结
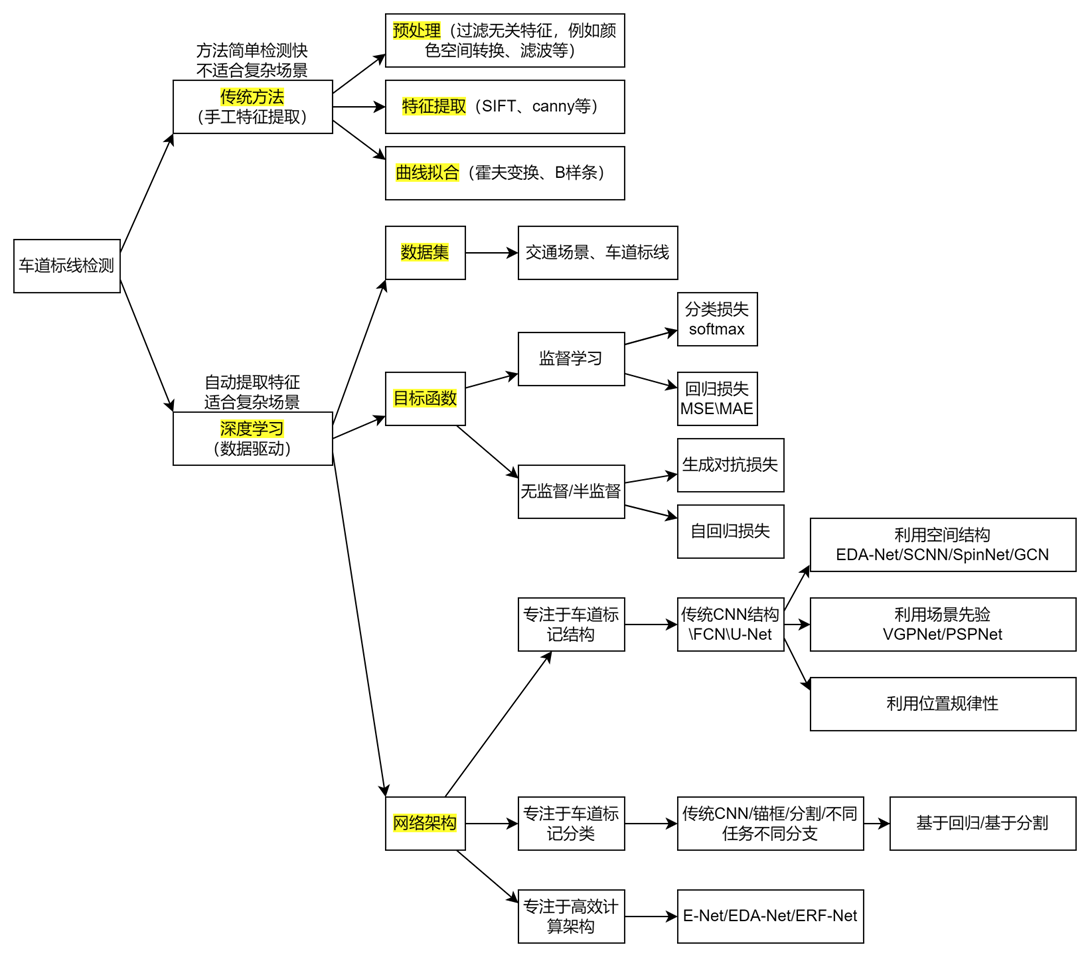
1. 道路标线检测数据集


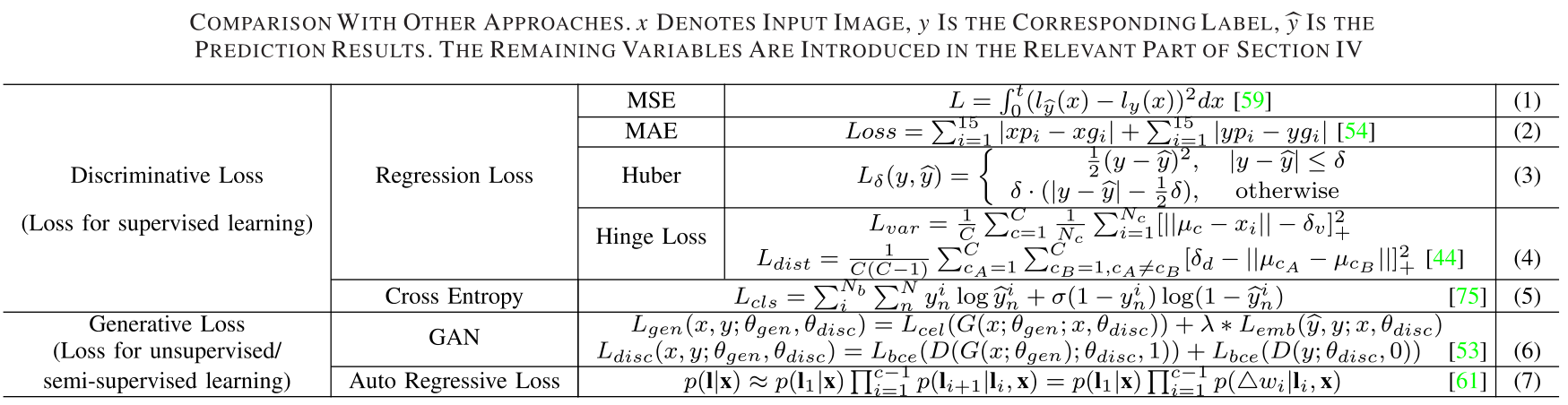
2. 代表性的目标函数

3. 车道标线检测网路
3.1 专注于车道标志结构的网络
-
传统基于CNN的方法:提取patch计算,耗费空间,冗余计算;patch大小不好确定;位置信息将在池化层丢弃
-
FCN:保留位置信息;端到端;处理任意大小;模糊也没考虑空间联系一致性
-
U-Net:解决上采样过程中丢失的有用信息,增加上下文联系;对称结构跳跃连接idea;但未考虑车道线特有的3个结构特性
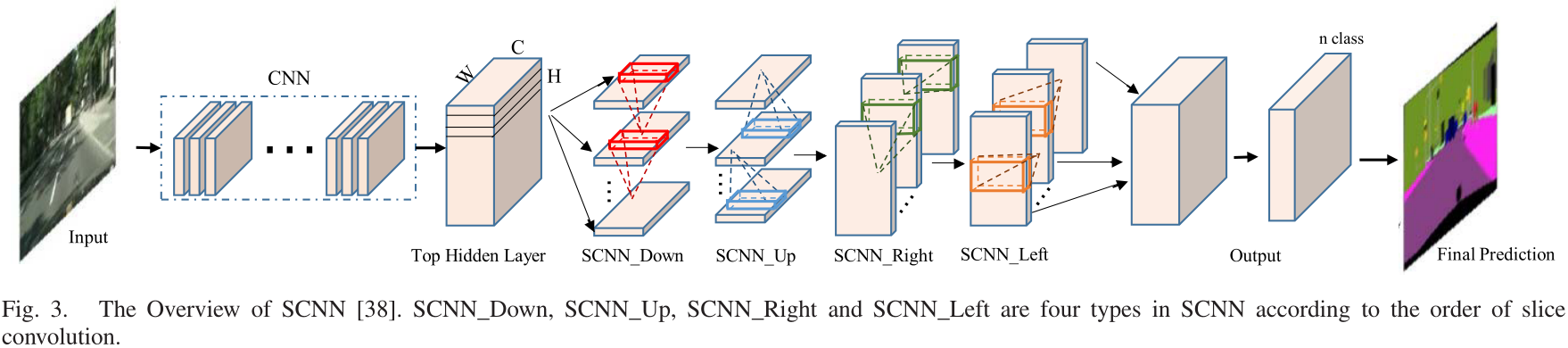
- 固有空间结构:空洞卷积【E-Net、EDANet及其变种】、特征图内部联系SCNN、检测细长的东西SpinNet一维卷积获得狭长感受野、图卷积网络GCN增强目标结构邻接矩阵突出节点
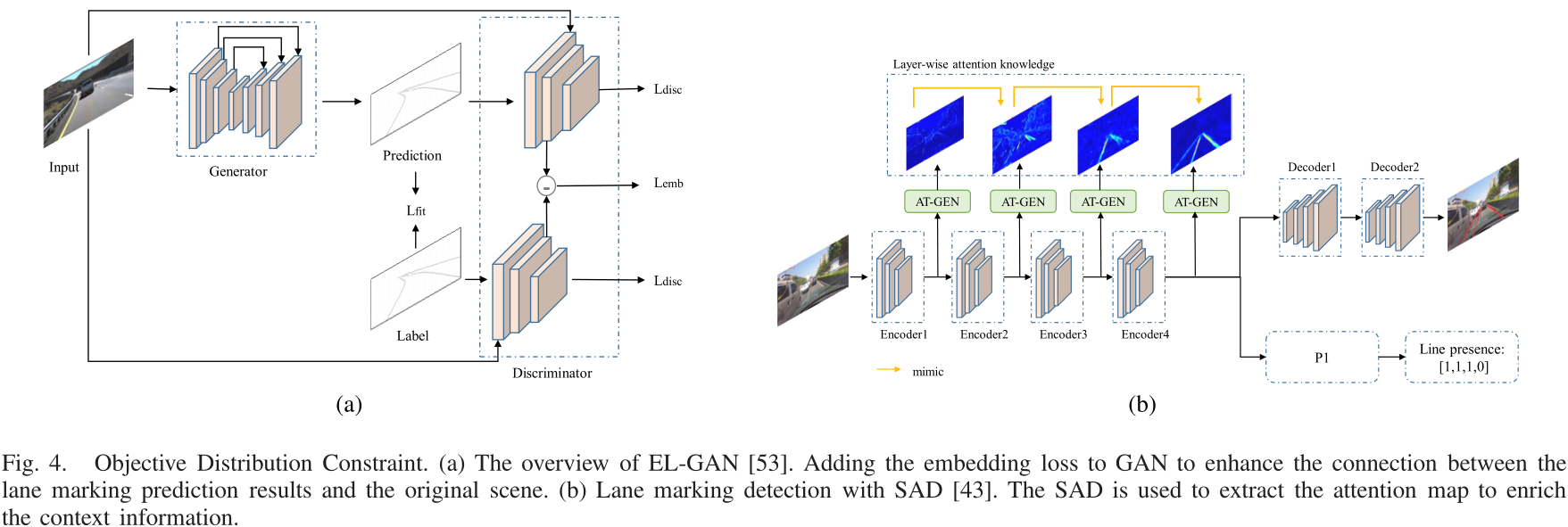
- 目标分部学习的改进:专注于分布级的学习而非CNN像素级特征,EL-GAN使用GAN获得更真实和丰富结构的语义分割结果,车道信息不完整Ripple-GAN、注意力机制不同特征权重、知识蒸馏提炼增强上下文信息连续性;利用场景先验知识(消失点VGPNet、全局信息PSPNet);利用位置规律LaneNet
3.2 专注于车道标志分类的深层架构


基于回归的车道标线检测易于分类,网络易于收敛;而基于分割的方法可以灵活应对车道标线的变化。[42]通过使用多任务网络结构将这两种方法结合起来。
3.3 专注于车道标志高效计算的深层架构
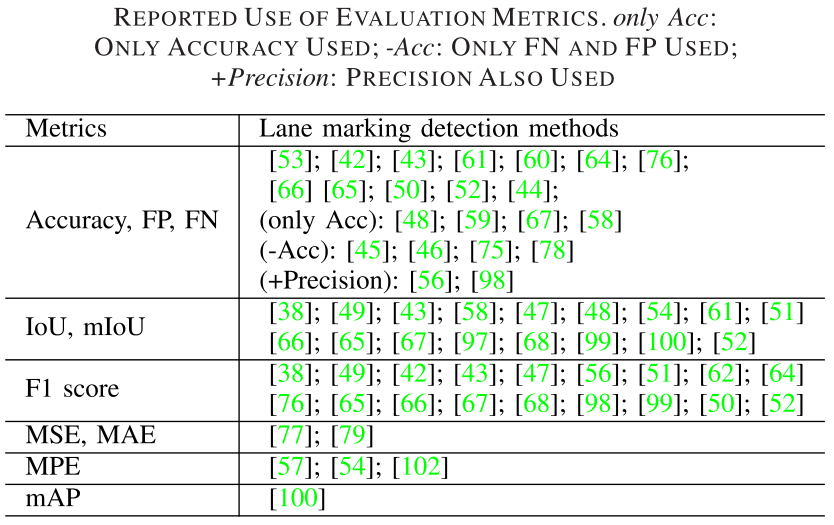
ResNet跳跃连接代替VGG加深网络,加快收敛;小尺度锚框;基于ResNet的E-Net,为减少计算量池化和卷积并行,n×n卷积被代替为n×1和1×n卷积的层叠,PReLU和空洞卷积和正则化来提高计算效率,因此E-Net经常作为提高车道标线检测网络效率的骨架…4. 数据预处理及评价标准

参考
【论文解读】车道标记检测中的深度学习:综述
【论文解读】2018-IV | LaneNet 基于实体分割的端到端车道线检测
【论文解读】2018-IV | LaneNet 代码调试
【论文解读】2018-arXiv | LineNet
【论文解读】2018-arXiv | LineNet 架构图
【论文解读】2018-arXiv | LineNet 三
【论文解读】2019-IV | PointLaneNet
【论文解读】2021-CVPR | LaneATT解析
【论文解读】2021-CVPR | LaneATT解析及代码
> 车道线检测传统方法&深度学习方法概览+两篇论文领读LaneATT+LaneNet
> 一文读懂语义分割和实例分割 -
相关阅读:
计算机毕业设计之流浪宠物管理系统
离子液体 [C6MIm]BF4/cas:244193-50-8/1-己基-3-甲基咪唑四氟硼酸盐黄色液体
c++后端开发书籍推荐
protobuf序列化和反序列化原理
vscode编写markdown
git创建一个本地仓库并上传一个lib文件
小鱼送激光雷达啦 | 恰饭即抽奖第二期
【Redis】Redis实现分布式锁
系统架构与Tomcat的安装和配置
R语言编写用户自定义函数: 使用RStudio的快捷键重新格式化代码、使得代码更好地排列、缩进等
- 原文地址:https://blog.csdn.net/qq_42672745/article/details/127958790