-
通过STM32Cube配置完成基于I2C协议的AHT20温湿度传感器的数据采集
前言
- 硬件:stm32f103c8t6 核心板
- 软件:STM32CubeMX 6.4.0
- 软件:keil5 mdk
- 软件:野火串口调试助手
一、I2C协议
1、应用
I2C 通讯协议(Inter-Integrated Circuit)是由 Phiilps 公司开发的,由于它引脚少,硬件实现简单,可扩展性强,不需要 USART、CAN 等通讯协议的外部收发设备,现在被广泛地
使用在系统内多个集成电路(IC)间的通讯。2、组成
最基本的是把它分为物理层和协议层。
物理层规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输。
协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准。简单来说物理层规定我们用嘴巴还是用肢体来交流,协议层则规定我们用中文还是英文来交流。- I2C 通讯设备之间的常用连接方式
- 物理层
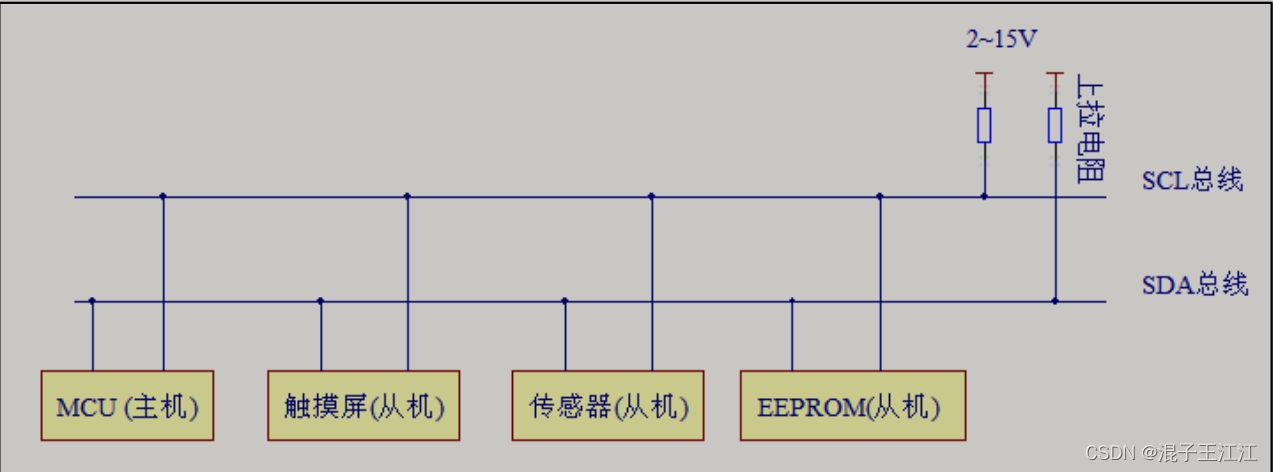
I2C是一个支持设备的总线。可连接多个 I2C 通讯设备,支持多个通讯主机及多个通讯从机。对于I2C 总线,只使用两条总线线路,一条双向串行数据线(SDA) ,一条串行时钟线(SCL)。
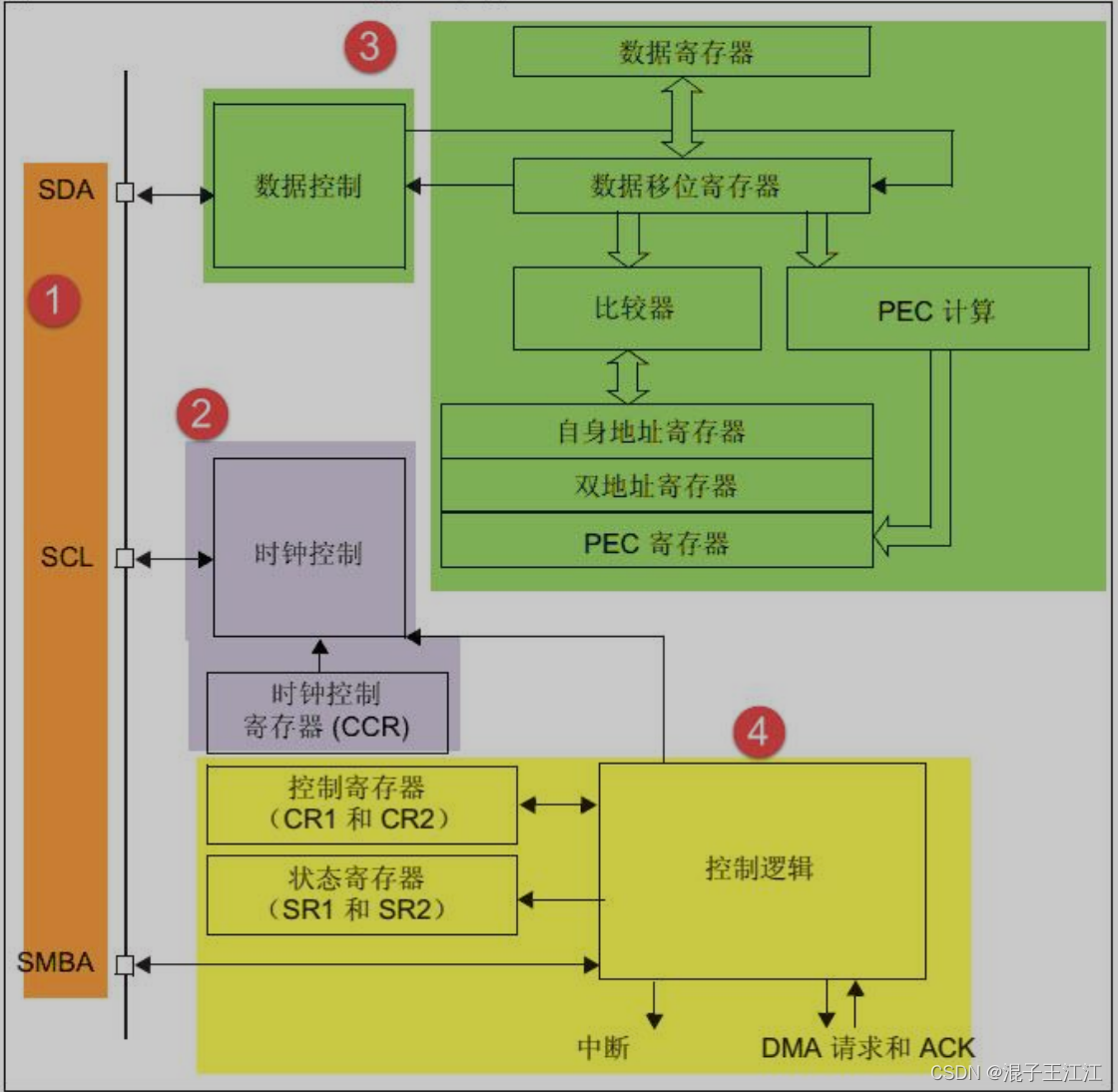
- 协议层
I2C 的协议定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地址广播等环节。- STM32的I2C架构:
- 通讯的起止:
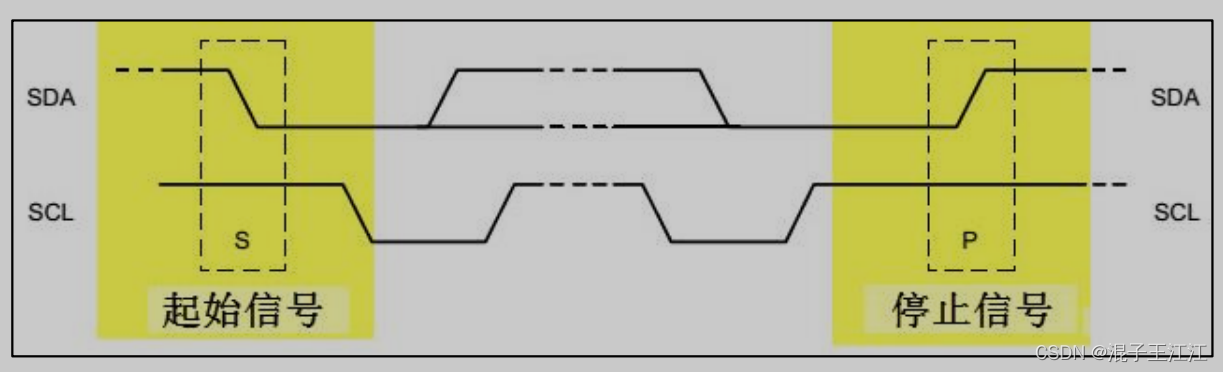
当 SCL 线是高电平时 SDA 线从高电平向低电平切换,这个情况表示通讯的起始。当 SCL 是高电平时 SDA 线由低电平向高电平切换,表示通讯的停止。起始和停止信号一般由主机产生。
- 数据的有效性
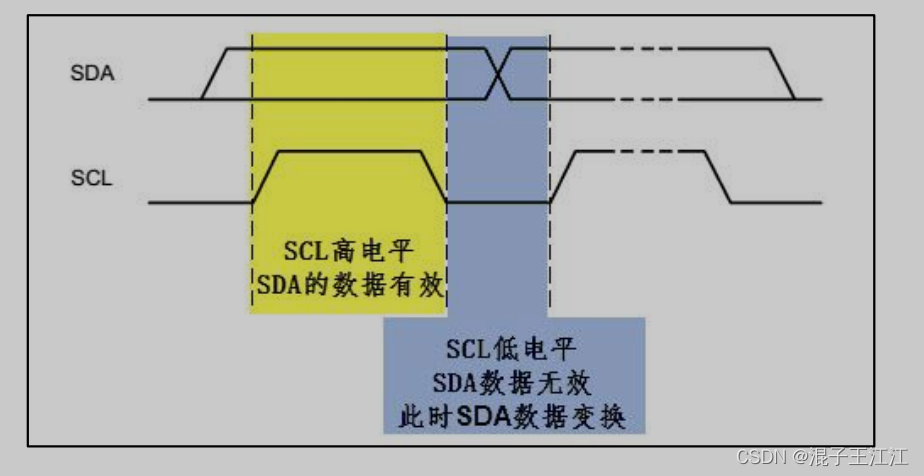
SDA 数据线在 SCL的每个时钟周期传输一位数据。传输时,SCL为高电平的时候 SDA表示的数据有效,即此时的 SDA为高电平时表示数据“1”,为低电平时表示数据“0”。当 SCL为低电平时,SDA的数据无效,一般在这个时候 SDA进行电平切换,为下一次表示数据做好准备。
- 响应
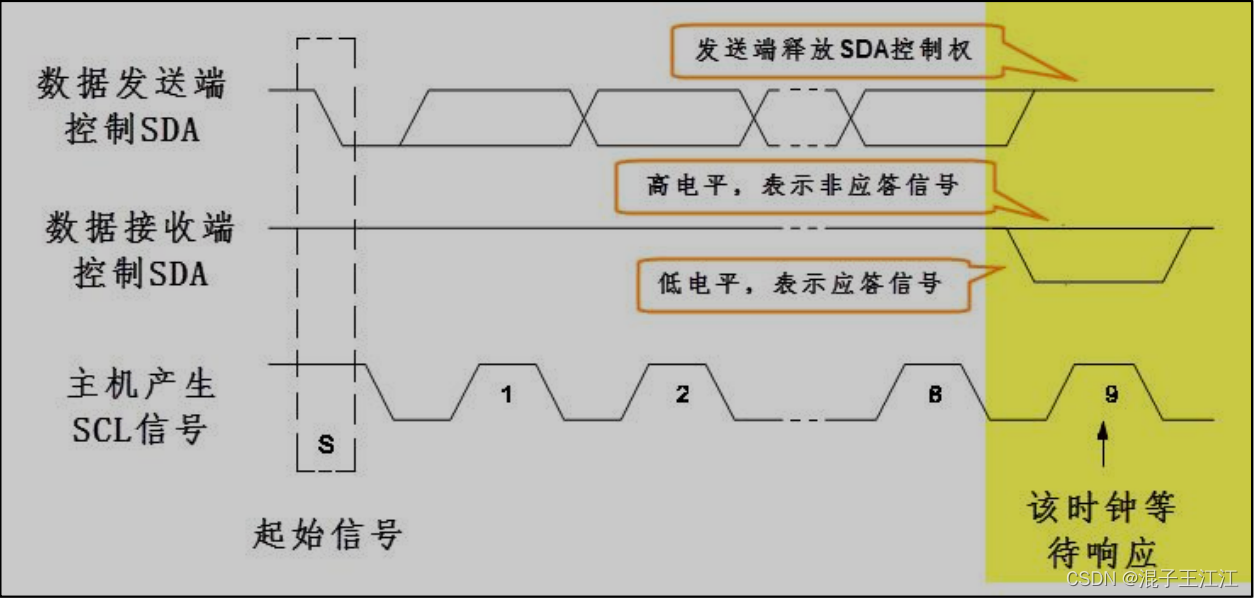
I2C 的数据和地址传输都带响应。响应包括“应答(ACK)”和“非应答(NACK)”两种信号。作为数据接收端时,当设备(无论主从机)接收到 I2C 传输的一个字节数据或地址后,若希望对方继续发送数据需要向对方发送“应答(ACK)”信号,发送方会继续发送下一个数据;若接收端希望结束数据传输,则向对方发送“非应答(NACK)”信号,发送方接收到该信号后会产生一个停止信号,结束信号传输。
3、软件I2C和硬件I2C
3.1软件I2C
通过CPU 控制每个时刻的引脚状态来控制 GPIO 引脚电平产生通讯时序的方式称为软件I2C。
3.2硬件I2C
STM32 的 I2C 片上外设专门负责实现 I2C 通讯协议,只要配置好该外设,它就会自动根据协议要求产生通讯信号,收发数据并缓存起来,CPU只要检测该外设的状态和访问数据寄存器,就能完成数据收发。这种通过外设进行数据收发的方式称为硬件I2C。
- 差别硬件 I2C 直接使用外设来控制引脚,可以减轻 CPU 的负担。不过使用硬件I2C 时必须使用某些固定的引脚作为 SCL 和 SDA,软件模拟 I2C 则可以使用任意 GPIO 引脚,相对比较灵活。对于硬件I2C用法比较复杂,软件I2C的流程更清楚一些。如果要详细了解I2C的协议,使用软件I2C可能更好的理解这个过程。在使用I2C过程,硬件I2C可能通信更加快,更加稳定。
二、通过硬件I2C协议采集AHT20的数据
1、配置项目
默认你已经创建了一个新项目
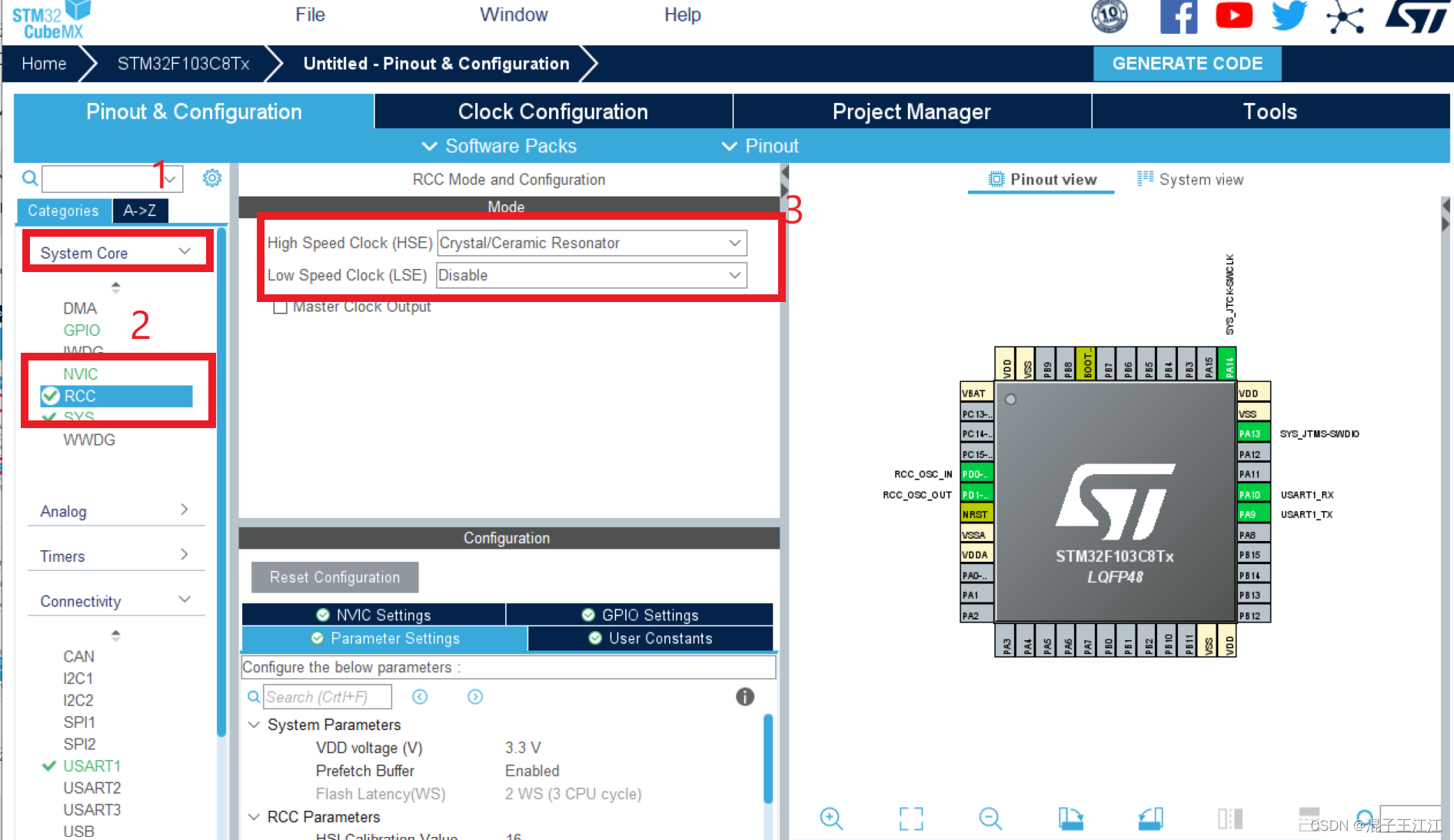
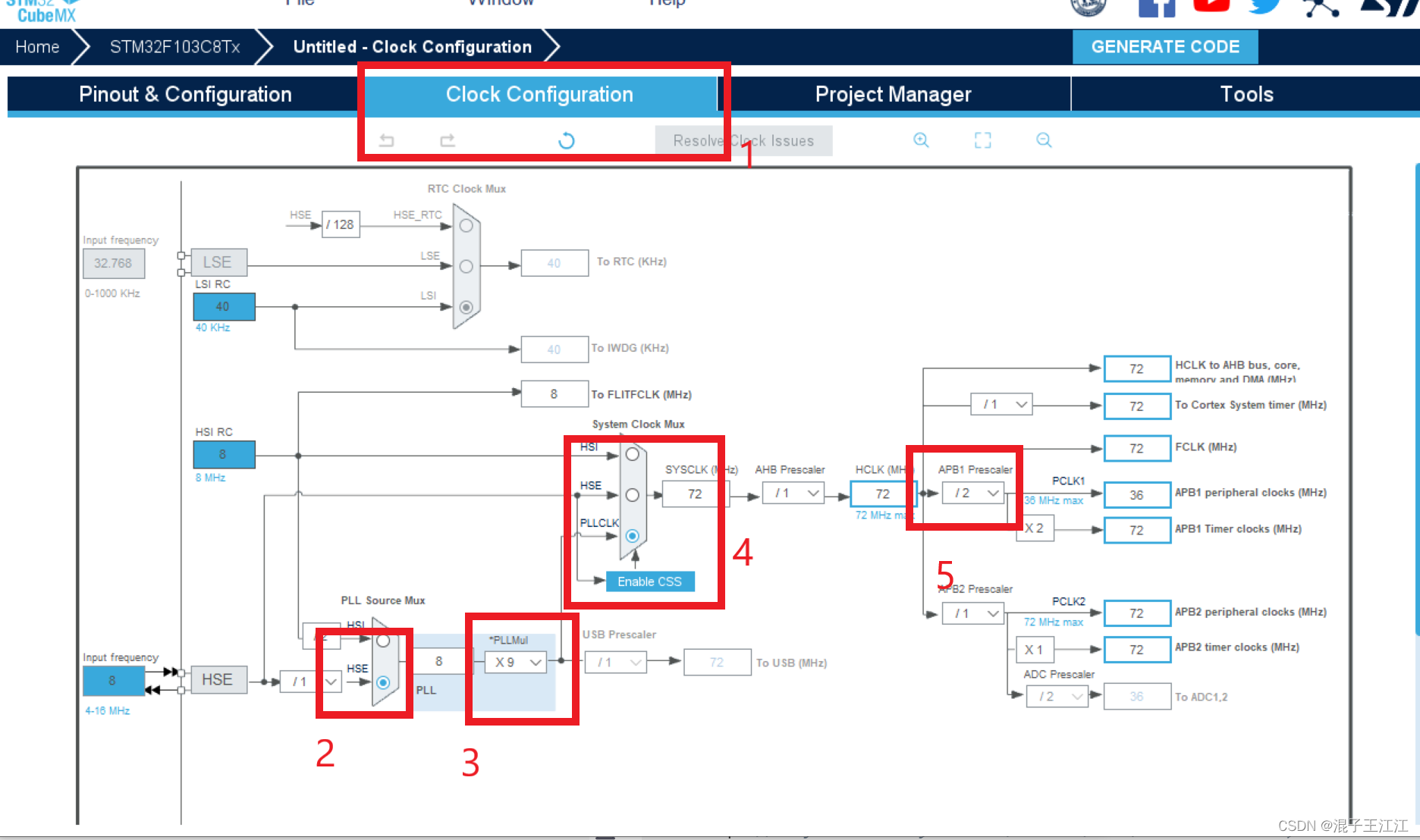
- 时钟RCC配置,将HSE选为外部晶振模式
- SYS设置,选择Serial Wire模式。

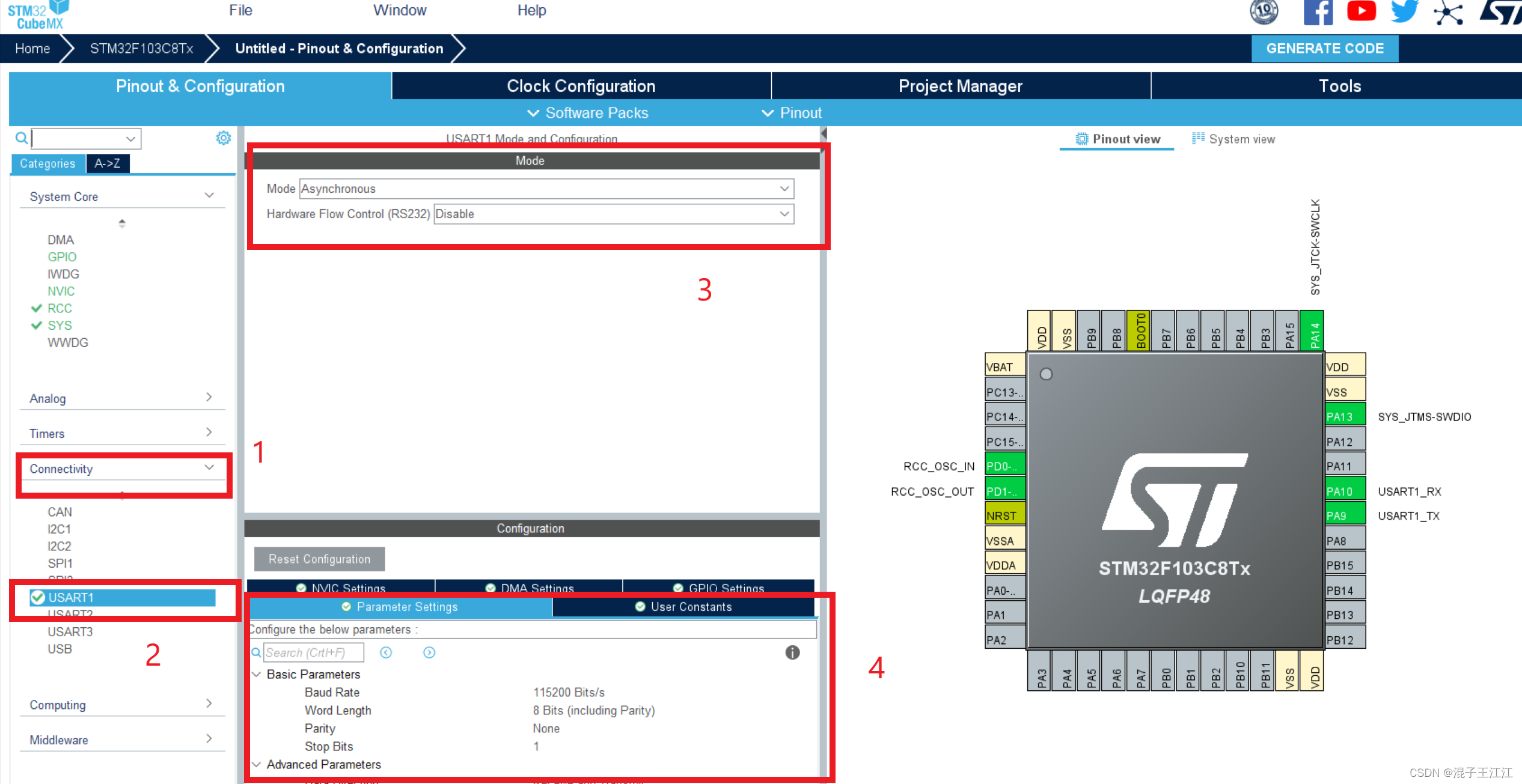
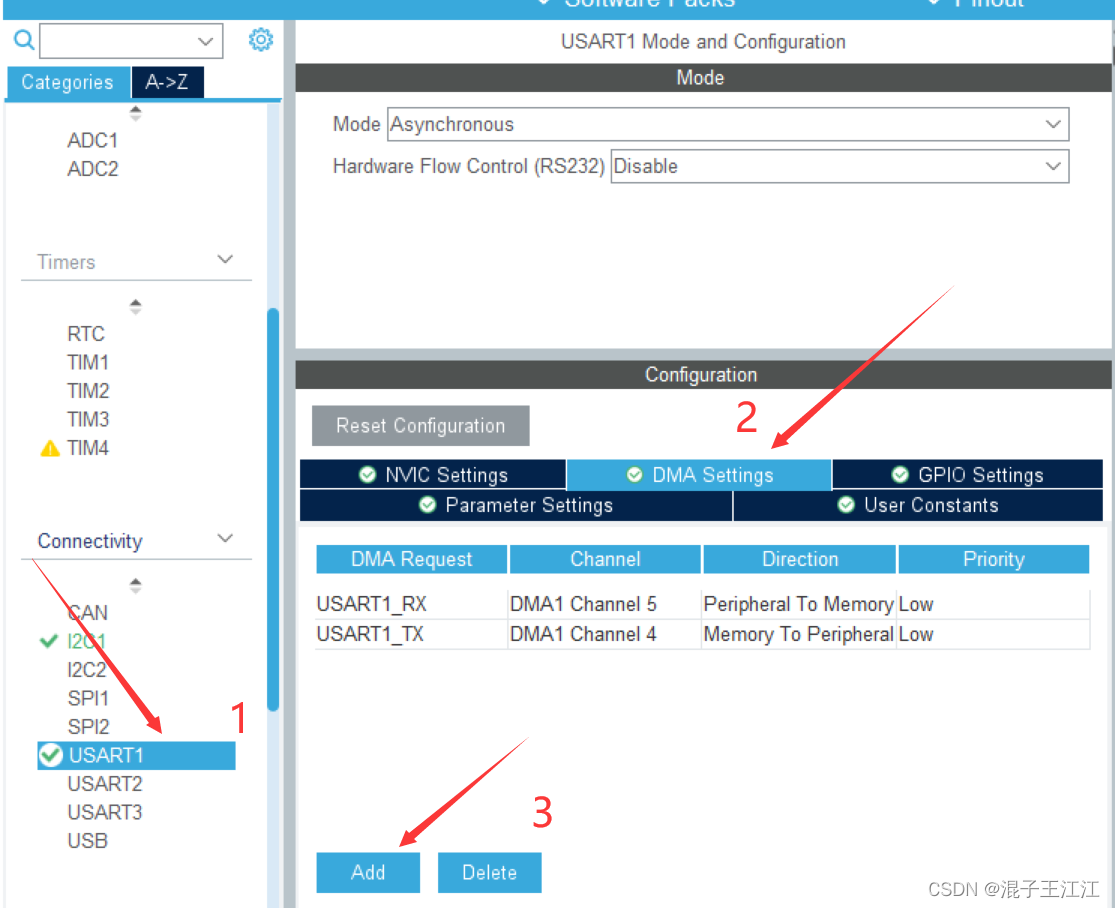
- 设置USART
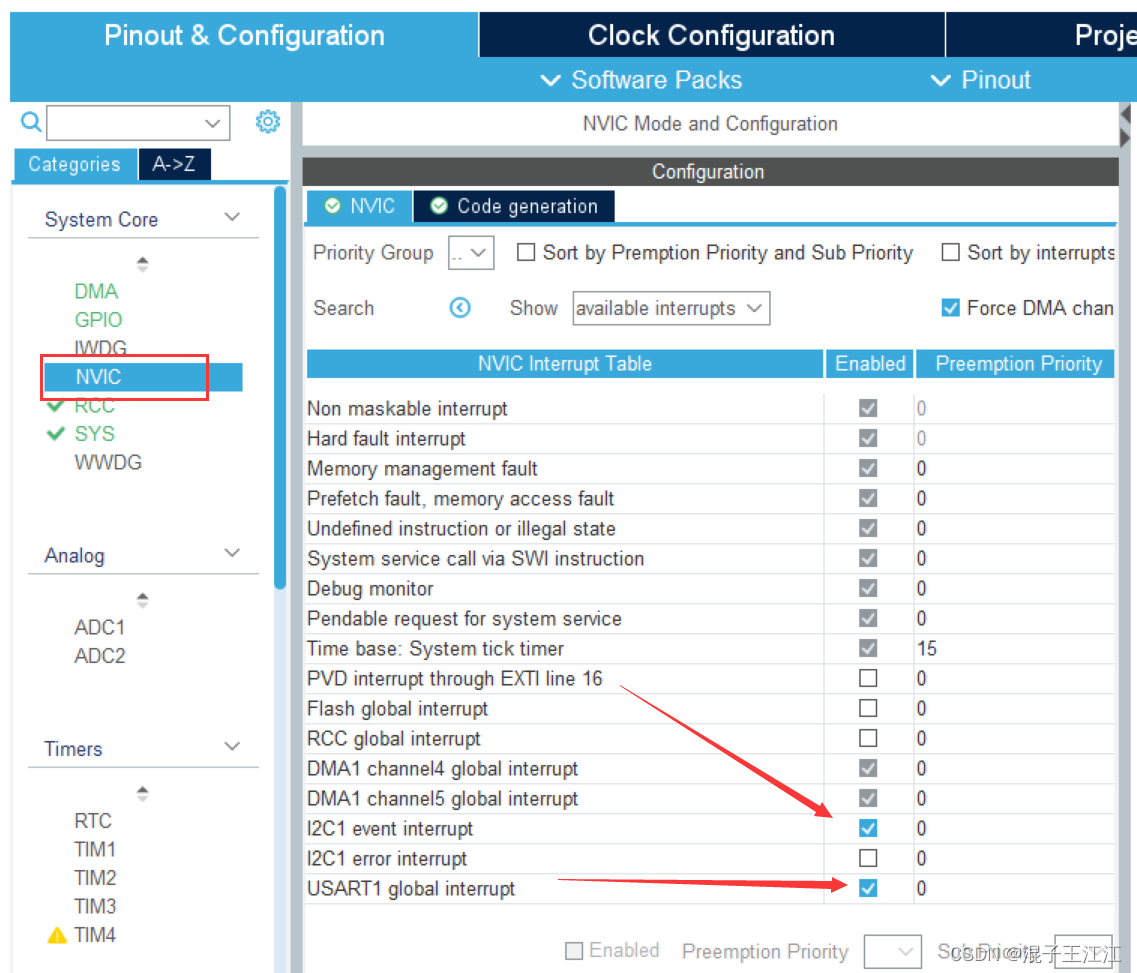
- 设置允许中断
- I2C设置

- 设置DMA模式

- RCC时钟
设置工程路径、工程名,最后导出文件。使用keil打开并进行编写。
2、配置代码
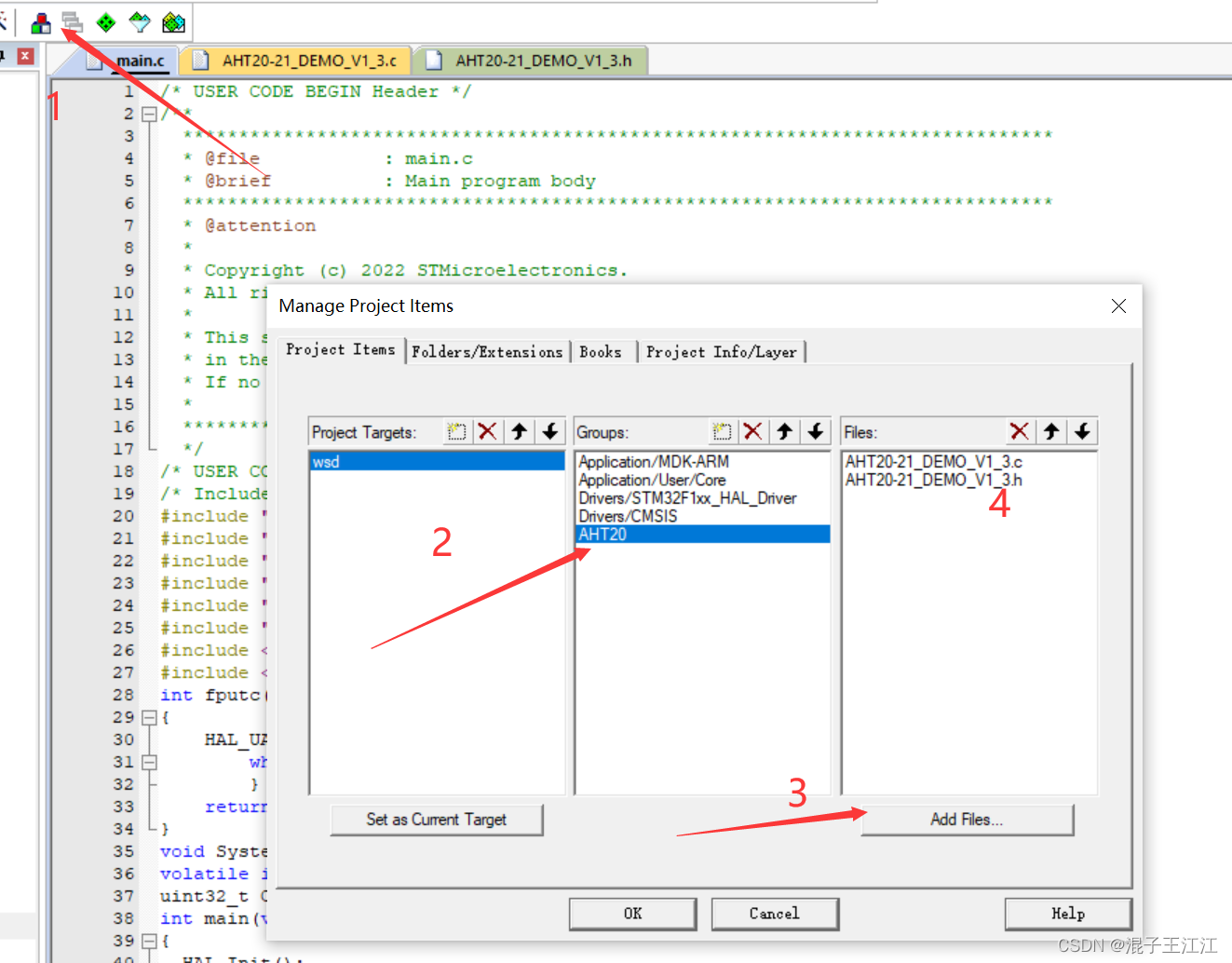
- 新建一个文件夹,里面放置两个文件:
AHT20-21_DEMO_V1_3.c和AHT20-21_DEMO_V1_3.h
然后通过小方块创建一个工程文件夹,将刚刚的两个文件添加进来,后面需要进行修改.
- 导入文件路径
复制前面新建的文件夹路径

设置文件路径
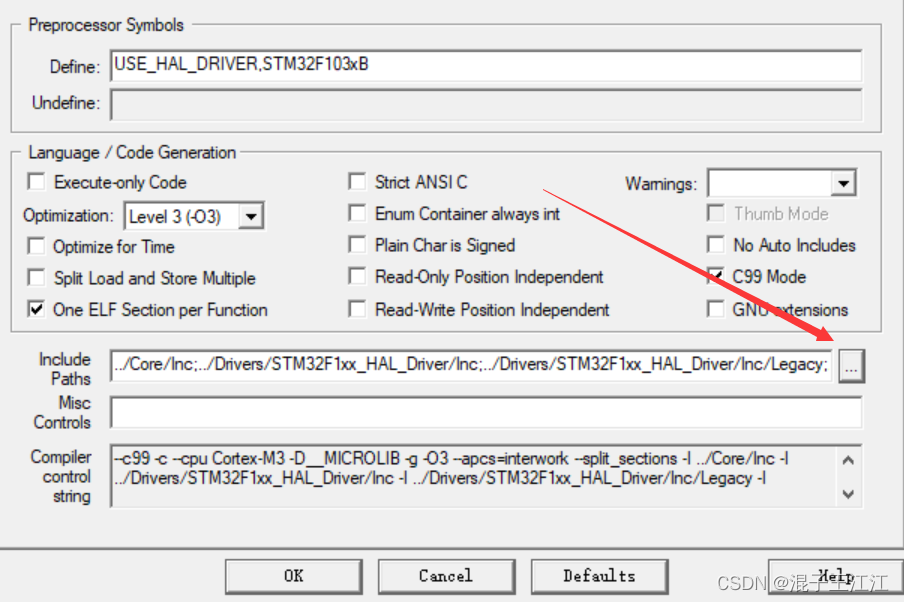
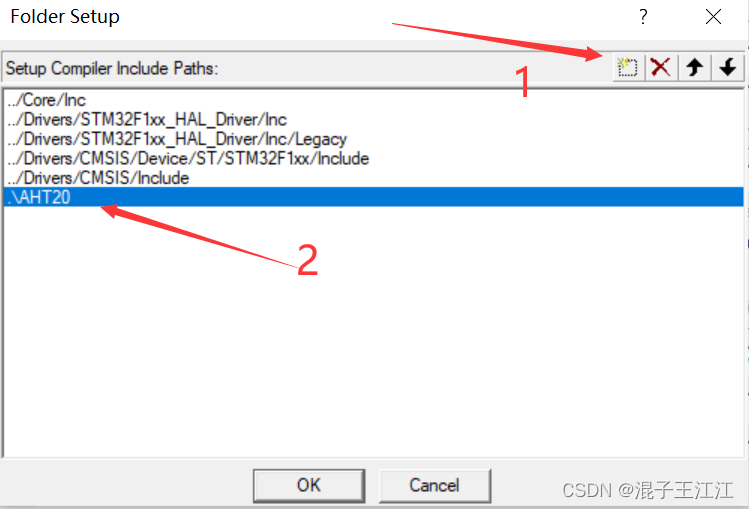
将刚刚文件路径放在最后步骤2那里,然后一致点击ok返回。-
因为后面重写了prntf函数,需要勾选允许微库。
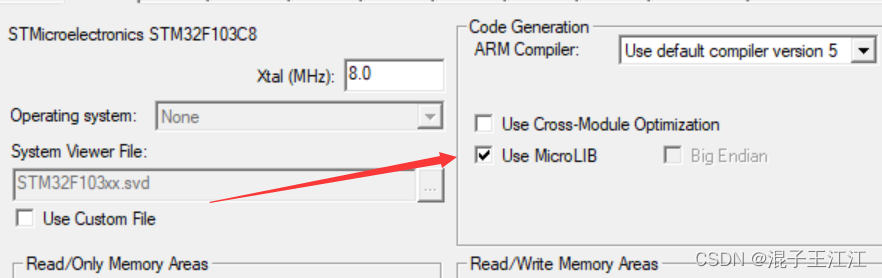
-
修改AHT20-21_DEMO_V1_3.h文件
#ifndef _AHT20_DEMO_ #define _AHT20_DEMO_ #include "main.h" void Delay_N10us(uint32_t t);//延时函数 void SensorDelay_us(uint32_t t);//延时函数 void Delay_4us(void); //延时函数 void Delay_5us(void); //延时函数 void Delay_1ms(uint32_t t); void AHT20_Clock_Init(void); //延时函数 void SDA_Pin_Output_High(void) ; //将PB15配置为输出 , 并设置为高电平, PB15作为I2C的SDA void SDA_Pin_Output_Low(void); //将P15配置为输出 并设置为低电平 void SDA_Pin_IN_FLOATING(void); //SDA配置为浮空输入 void SCL_Pin_Output_High(void); //SCL输出高电平,P14作为I2C的SCL void SCL_Pin_Output_Low(void); //SCL输出低电平 void Init_I2C_Sensor_Port(void); //初始化I2C接口,输出为高电平 void I2C_Start(void); //I2C主机发送START信号 void AHT20_WR_Byte(uint8_t Byte); //往AHT20写一个字节 uint8_t AHT20_RD_Byte(void);//从AHT20读取一个字节 uint8_t Receive_ACK(void); //看AHT20是否有回复ACK void Send_ACK(void) ; //主机回复ACK信号 void Send_NOT_ACK(void); //主机不回复ACK void Stop_I2C(void); //一条协议结束 uint8_t AHT20_Read_Status(void);//读取AHT20的状态寄存器 uint8_t AHT20_Read_Cal_Enable(void); //查询cal enable位有没有使能 void AHT20_SendAC(void); //向AHT20发送AC命令 uint8_t Calc_CRC8(uint8_t *message,uint8_t Num); void AHT20_Read_CTdata(uint32_t *ct); //没有CRC校验,直接读取AHT20的温度和湿度数据 void AHT20_Read_CTdata_crc(uint32_t *ct); //CRC校验后,读取AHT20的温度和湿度数据 void AHT20_Init(void); //初始化AHT20 void JH_Reset_REG(uint8_t addr);///重置寄存器 void AHT20_Start_Init(void);///上电初始化进入正常测量状态 #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 修改AHT20-21_DEMO_V1_3.c文件
/*******************************************/ /*@版权所有:广州奥松电子有限公司 */ /*@作者:温湿度传感器事业部 */ /*@版本:V1.2 */ /*******************************************/ //#include "main.h" #include "AHT20-21_DEMO_V1_3.h" #include "gpio.h" #include "i2c.h" void Delay_N10us(uint32_t t)//延时函数 { uint32_t k; while(t--) { for (k = 0; k < 2; k++);//110 } } void SensorDelay_us(uint32_t t)//延时函数 { for(t = t-2; t>0; t--) { Delay_N10us(1); } } void Delay_4us(void) //延时函数 { Delay_N10us(1); Delay_N10us(1); Delay_N10us(1); Delay_N10us(1); } void Delay_5us(void) //延时函数 { Delay_N10us(1); Delay_N10us(1); Delay_N10us(1); Delay_N10us(1); Delay_N10us(1); } void Delay_1ms(uint32_t t) //延时函数 { while(t--) { SensorDelay_us(1000);//延时1ms } } //void AHT20_Clock_Init(void) //延时函数 //{ // RCC_APB2PeriphClockCmd(CC_APB2Periph_GPIOB,ENABLE); //} void SDA_Pin_Output_High(void) //将PB7配置为输出 , 并设置为高电平, PB7作为I2C的SDA { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出 GPIO_InitStruct.Pin = GPIO_PIN_7; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOB,& GPIO_InitStruct); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_SET); } void SDA_Pin_Output_Low(void) //将P7配置为输出 并设置为低电平 { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出 GPIO_InitStruct.Pin = GPIO_PIN_7; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOB,& GPIO_InitStruct); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_RESET); } void SDA_Pin_IN_FLOATING(void) //SDA配置为浮空输入 { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Mode = GPIO_MODE_INPUT;//浮空 GPIO_InitStruct.Pin = GPIO_PIN_7; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init( GPIOB,&GPIO_InitStruct); } void SCL_Pin_Output_High(void) //SCL输出高电平,P14作为I2C的SCL { HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET); } void SCL_Pin_Output_Low(void) //SCL输出低电平 { HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET); } void Init_I2C_Sensor_Port(void) //初始化I2C接口,输出为高电平 { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出 GPIO_InitStruct.Pin = GPIO_PIN_7; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOB,& GPIO_InitStruct); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15,GPIO_PIN_SET); GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出 GPIO_InitStruct.Pin = GPIO_PIN_6; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOB,& GPIO_InitStruct); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15,GPIO_PIN_SET); } void I2C_Start(void) //I2C主机发送START信号 { SDA_Pin_Output_High(); SensorDelay_us(8); SCL_Pin_Output_High(); SensorDelay_us(8); SDA_Pin_Output_Low(); SensorDelay_us(8); SCL_Pin_Output_Low(); SensorDelay_us(8); } void AHT20_WR_Byte(uint8_t Byte) //往AHT20写一个字节 { uint8_t Data,N,i; Data=Byte; i = 0x80; for(N=0;N<8;N++) { SCL_Pin_Output_Low(); Delay_4us(); if(i&Data) { SDA_Pin_Output_High(); } else { SDA_Pin_Output_Low(); } SCL_Pin_Output_High(); Delay_4us(); Data <<= 1; } SCL_Pin_Output_Low(); SensorDelay_us(8); SDA_Pin_IN_FLOATING(); SensorDelay_us(8); } uint8_t AHT20_RD_Byte(void)//从AHT20读取一个字节 { uint8_t Byte,i,a; Byte = 0; SCL_Pin_Output_Low(); SDA_Pin_IN_FLOATING(); SensorDelay_us(8); for(i=0;i<8;i++) { SCL_Pin_Output_High(); Delay_5us(); a=0; //if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_15)) a=1; if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) a=1; Byte = (Byte<<1)|a; //SCL_Pin_Output_Low(); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET); Delay_5us(); } SDA_Pin_IN_FLOATING(); SensorDelay_us(8); return Byte; } uint8_t Receive_ACK(void) //看AHT20是否有回复ACK { uint16_t CNT; CNT = 0; SCL_Pin_Output_Low(); SDA_Pin_IN_FLOATING(); SensorDelay_us(8); SCL_Pin_Output_High(); SensorDelay_us(8); while((HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) && CNT < 100) CNT++; if(CNT == 100) { return 0; } SCL_Pin_Output_Low(); SensorDelay_us(8); return 1; } void Send_ACK(void) //主机回复ACK信号 { SCL_Pin_Output_Low(); SensorDelay_us(8); SDA_Pin_Output_Low(); SensorDelay_us(8); SCL_Pin_Output_High(); SensorDelay_us(8); SCL_Pin_Output_Low(); SensorDelay_us(8); SDA_Pin_IN_FLOATING(); SensorDelay_us(8); } void Send_NOT_ACK(void) //主机不回复ACK { SCL_Pin_Output_Low(); SensorDelay_us(8); SDA_Pin_Output_High(); SensorDelay_us(8); SCL_Pin_Output_High(); SensorDelay_us(8); SCL_Pin_Output_Low(); SensorDelay_us(8); SDA_Pin_Output_Low(); SensorDelay_us(8); } void Stop_I2C(void) //一条协议结束 { SDA_Pin_Output_Low(); SensorDelay_us(8); SCL_Pin_Output_High(); SensorDelay_us(8); SDA_Pin_Output_High(); SensorDelay_us(8); } uint8_t AHT20_Read_Status(void)//读取AHT20的状态寄存器 { uint8_t Byte_first; I2C_Start(); AHT20_WR_Byte(0x71); Receive_ACK(); Byte_first = AHT20_RD_Byte(); Send_NOT_ACK(); Stop_I2C(); return Byte_first; } uint8_t AHT20_Read_Cal_Enable(void) //查询cal enable位有没有使能 { uint8_t val = 0;//ret = 0, val = AHT20_Read_Status(); if((val & 0x68)==0x08) return 1; else return 0; } void AHT20_SendAC(void) //向AHT20发送AC命令 { I2C_Start(); AHT20_WR_Byte(0x70); Receive_ACK(); AHT20_WR_Byte(0xac);//0xAC采集命令 Receive_ACK(); AHT20_WR_Byte(0x33); Receive_ACK(); AHT20_WR_Byte(0x00); Receive_ACK(); Stop_I2C(); } //CRC校验类型:CRC8/MAXIM //多项式:X8+X5+X4+1 //Poly:0011 0001 0x31 //高位放到后面就变成 1000 1100 0x8c //C现实代码: uint8_t Calc_CRC8(uint8_t *message,uint8_t Num) { uint8_t i; uint8_t byte; uint8_t crc=0xFF; for(byte=0; byte<Num; byte++) { crc^=(message[byte]); for(i=8;i>0;--i) { if(crc&0x80) crc=(crc<<1)^0x31; else crc=(crc<<1); } } return crc; } void AHT20_Read_CTdata(uint32_t *ct) //没有CRC校验,直接读取AHT20的温度和湿度数据 { volatile uint8_t Byte_1th=0; volatile uint8_t Byte_2th=0; volatile uint8_t Byte_3th=0; volatile uint8_t Byte_4th=0; volatile uint8_t Byte_5th=0; volatile uint8_t Byte_6th=0; uint32_t RetuData = 0; uint16_t cnt = 0; AHT20_SendAC();//向AHT10发送AC命令 Delay_1ms(80);//延时80ms左右 cnt = 0; while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态 { SensorDelay_us(1508); if(cnt++>=100) { break; } } I2C_Start(); AHT20_WR_Byte(0x71); Receive_ACK(); Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0 Send_ACK(); Byte_2th = AHT20_RD_Byte();//湿度 Send_ACK(); Byte_3th = AHT20_RD_Byte();//湿度 Send_ACK(); Byte_4th = AHT20_RD_Byte();//湿度/温度 Send_ACK(); Byte_5th = AHT20_RD_Byte();//温度 Send_ACK(); Byte_6th = AHT20_RD_Byte();//温度 Send_NOT_ACK(); Stop_I2C(); RetuData = (RetuData|Byte_2th)<<8; RetuData = (RetuData|Byte_3th)<<8; RetuData = (RetuData|Byte_4th); RetuData =RetuData >>4; ct[0] = RetuData;//湿度 RetuData = 0; RetuData = (RetuData|Byte_4th)<<8; RetuData = (RetuData|Byte_5th)<<8; RetuData = (RetuData|Byte_6th); RetuData = RetuData&0xfffff; ct[1] =RetuData; //温度 } void AHT20_Read_CTdata_crc(uint32_t *ct) //CRC校验后,读取AHT20的温度和湿度数据 { volatile uint8_t Byte_1th=0; volatile uint8_t Byte_2th=0; volatile uint8_t Byte_3th=0; volatile uint8_t Byte_4th=0; volatile uint8_t Byte_5th=0; volatile uint8_t Byte_6th=0; volatile uint8_t Byte_7th=0; uint32_t RetuData = 0; uint16_t cnt = 0; // uint8_t CRCDATA=0; uint8_t CTDATA[6]={0};//用于CRC传递数组 AHT20_SendAC();//向AHT10发送AC命令 Delay_1ms(80);//延时80ms左右 cnt = 0; while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态 { SensorDelay_us(1508); if(cnt++>=100) { break; } } I2C_Start(); AHT20_WR_Byte(0x71); Receive_ACK(); CTDATA[0]=Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0 Send_ACK(); CTDATA[1]=Byte_2th = AHT20_RD_Byte();//湿度 Send_ACK(); CTDATA[2]=Byte_3th = AHT20_RD_Byte();//湿度 Send_ACK(); CTDATA[3]=Byte_4th = AHT20_RD_Byte();//湿度/温度 Send_ACK(); CTDATA[4]=Byte_5th = AHT20_RD_Byte();//温度 Send_ACK(); CTDATA[5]=Byte_6th = AHT20_RD_Byte();//温度 Send_ACK(); Byte_7th = AHT20_RD_Byte();//CRC数据 Send_NOT_ACK(); //注意: 最后是发送NAK Stop_I2C(); if(Calc_CRC8(CTDATA,6)==Byte_7th) { RetuData = (RetuData|Byte_2th)<<8; RetuData = (RetuData|Byte_3th)<<8; RetuData = (RetuData|Byte_4th); RetuData =RetuData >>4; ct[0] = RetuData;//湿度 RetuData = 0; RetuData = (RetuData|Byte_4th)<<8; RetuData = (RetuData|Byte_5th)<<8; RetuData = (RetuData|Byte_6th); RetuData = RetuData&0xfffff; ct[1] =RetuData; //温度 } else { ct[0]=0x00; ct[1]=0x00;//校验错误返回值,客户可以根据自己需要更改 }//CRC数据 } void AHT20_Init(void) //初始化AHT20 { Init_I2C_Sensor_Port(); I2C_Start(); AHT20_WR_Byte(0x70); Receive_ACK(); AHT20_WR_Byte(0xa8);//0xA8进入NOR工作模式 Receive_ACK(); AHT20_WR_Byte(0x00); Receive_ACK(); AHT20_WR_Byte(0x00); Receive_ACK(); Stop_I2C(); Delay_1ms(10);//延时10ms左右 I2C_Start(); AHT20_WR_Byte(0x70); Receive_ACK(); AHT20_WR_Byte(0xbe);//0xBE初始化命令,AHT20的初始化命令是0xBE, AHT10的初始化命令是0xE1 Receive_ACK(); AHT20_WR_Byte(0x08);//相关寄存器bit[3]置1,为校准输出 Receive_ACK(); AHT20_WR_Byte(0x00); Receive_ACK(); Stop_I2C(); Delay_1ms(10);//延时10ms左右 } void JH_Reset_REG(uint8_t addr) { uint8_t Byte_first,Byte_second,Byte_third; I2C_Start(); AHT20_WR_Byte(0x70);//原来是0x70 Receive_ACK(); AHT20_WR_Byte(addr); Receive_ACK(); AHT20_WR_Byte(0x00); Receive_ACK(); AHT20_WR_Byte(0x00); Receive_ACK(); Stop_I2C(); Delay_1ms(5);//延时5ms左右 I2C_Start(); AHT20_WR_Byte(0x71);// Receive_ACK(); Byte_first = AHT20_RD_Byte(); Send_ACK(); Byte_second = AHT20_RD_Byte(); Send_ACK(); Byte_third = AHT20_RD_Byte(); Send_NOT_ACK(); Stop_I2C(); Delay_1ms(10);//延时10ms左右 I2C_Start(); AHT20_WR_Byte(0x70);/// Receive_ACK(); AHT20_WR_Byte(0xB0|addr);寄存器命令 Receive_ACK(); AHT20_WR_Byte(Byte_second); Receive_ACK(); AHT20_WR_Byte(Byte_third); Receive_ACK(); Stop_I2C(); Byte_second=0x00; Byte_third =0x00; } void AHT20_Start_Init(void) { JH_Reset_REG(0x1b); JH_Reset_REG(0x1c); JH_Reset_REG(0x1e); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
- 450
- 451
- 452
- 453
- 454
- 455
- 456
- 457
- 458
- 459
- 460
- 461
- 462
- 463
- 464
- 465
- 466
- 467
- 468
- 469
- 470
- 471
- 472
- 473
- 474
- 475
- 476
- 477
- 478
- 479
- 480
- 481
- 482
- 483
- 484
- 485
- 486
- 487
- 488
- 489
- 490
- 491
- 492
- 493
- 494
- 495
- 496
- 497
- 498
- 499
- 500
- 501
- 502
- 503
- 504
- 505
- 506
- 507
- 508
- 将main.c文件里main函数包括上面的头文件等信息删除,换成下面代码
#include "main.h" #include "dma.h" #include "i2c.h" #include "usart.h" #include "gpio.h" #include "AHT20-21_DEMO_V1_3.h" #include#include int fputc(int ch,FILE *f)//重新printf { HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xFFFF); while(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_TC)!=SET){ } return ch; } void SystemClock_Config(void); volatile int c1,t1; uint32_t CT_data[2]={0,0}; int main(void) { HAL_Init(); SystemClock_Config(); MX_USART1_UART_Init(); MX_DMA_Init(); MX_I2C1_Init(); AHT20_Init();//放在其它之后 if((AHT20_Read_Status()&0x18)!=0x18) { AHT20_Start_Init(); //重新初始化寄存器 Delay_1ms(10); } while (1) { AHT20_Read_CTdata(CT_data); //不经过CRC校验,直接读取AHT20的温度和湿度数据 推荐每隔大于1S读一次 //AHT20_Read_CTdata_crc(CT_data); //crc校验后,读取AHT20的温度和湿度数据 c1 = CT_data[0]*100*10/1024/1024; //计算得到湿度值c1(放大了10倍) t1 = CT_data[1]*200*10/1024/1024-500;//计算得到温度值t1(放大了10倍) printf("湿度:%d%s",c1/10,"%"); printf("温度:%d%s",t1/10,"℃"); printf("\r\n"); HAL_Delay(3000); } } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
编译烧录均无问题
三、效果

20221116_233110
四、总结
学习了IIC协议,清楚协议大致流程。第一次使用传感器进行实验,感觉很酷。也是第一次调用厂商的代码,并且通过STM32Cube进行配置相当方便,这样应该是以后工作的常态吧(使用厂商的代码)。
五、参考资料
https://blog.csdn.net/qq_43279579/article/details/111597278
https://blog.csdn.net/Mouer__/article/details/121514102 -
相关阅读:
Altium Dsigner 20 工艺参数设置修改
【JUC源码专题】LinkedBlockingDeque 源码分析(JDK8)
应对项目严重滞后4大有效补救方法
Vue常见面试题,如何修改滚动条样式(谷歌浏览器)
线上接口流量突增,快要扛不住了
SQL server2019 Express安装
PolylineVolumeEntity通过materialOptions设置颜色,点击切换颜色
电力电子转战数字IC20220727day57——寄存器模型(续)
Python实验项目6 :文件操作与模块化
Excel查询时用vlookup或者xlookup时,虽然用的参数选择的是精确匹配,但是发现不能区分大小写,应该如何解决?
- 原文地址:https://blog.csdn.net/qq_52215423/article/details/127887672
