-
蓝桥杯单片机第八届省赛题详细讲解(模拟风扇控制系统)
演示视频
题目讲解
首先还是从整个赛题的程序框图开始看起,如图。
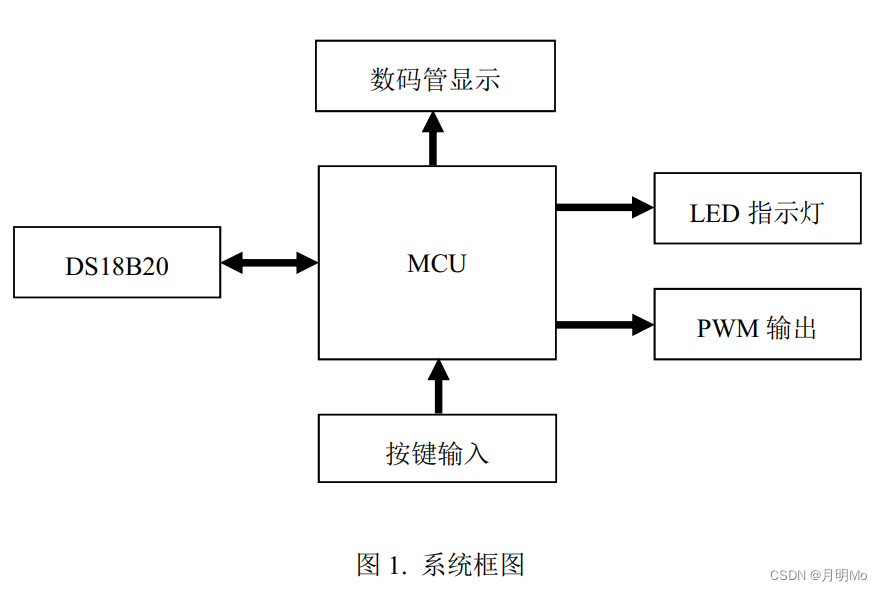
做题之前要做的是把系统框图里面的各个模块先提前调试好!!!(DS18B20,数码管显示,独立按键)
记得接下来每一步都要进行调试。
调试完成后进一步看题目:
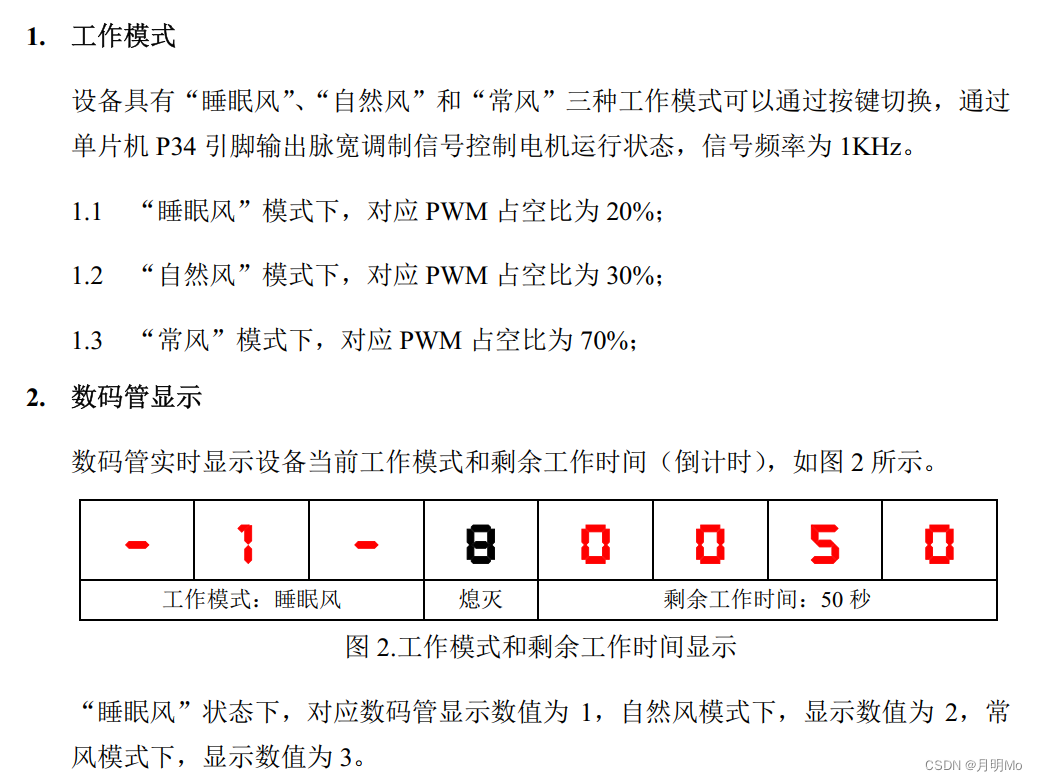
有工作模式,和数码管显示,工作模式先不看,首先看数码管显示。uchar SMG_mode=0,temp; //数码管模式定义 温度定义 uchar work_mode=1; //工作模式 uint surplus_time=50;//剩余时间定义 void main(void) { init(); //初始开发板 while(1) { temp=rd_temperature(); if(SMG_mode==0) { SMG[0]=SMG[2]=21;SMG[1]=work_mode; SMG[3]=20;SMG[4]=surplus_time/1000; SMG[5]=surplus_time%1000/100; SMG[6]=surplus_time%100/10; SMG[7]=surplus_time%10; } SMG_output(); Dkey_scan(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
然后接着往下看按键设置。
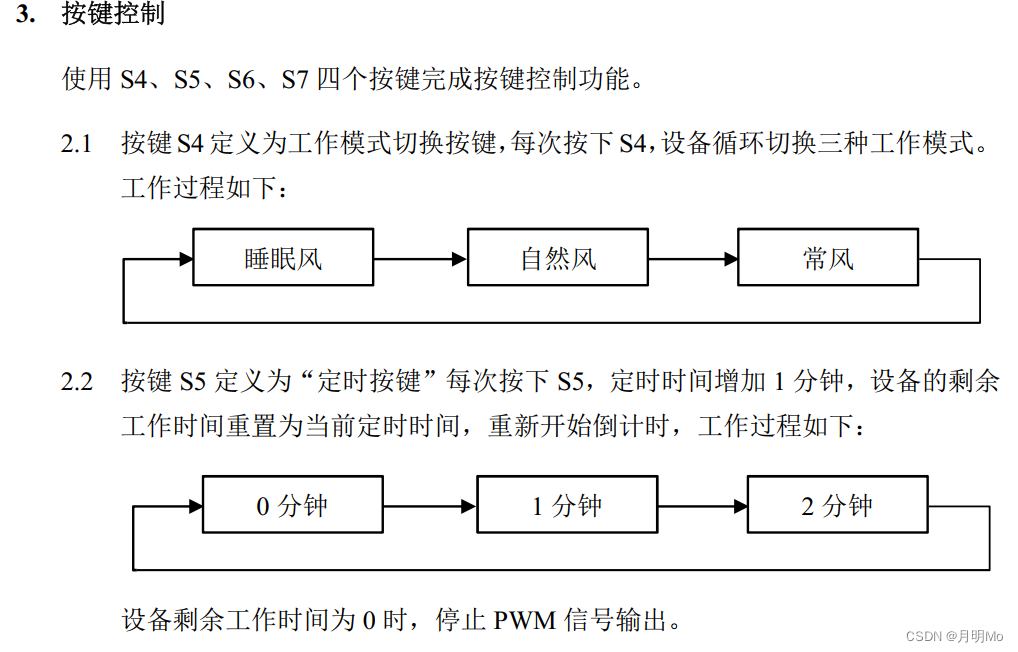
首先设置S4,S5两个按键。case 0x0b: //S5 surplus_time+=60; break; case 0x07: //S4 if(work_mode==1)work_mode=2; else if(work_mode==2)work_mode=3; else if(work_mode==3)work_mode=1; break;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
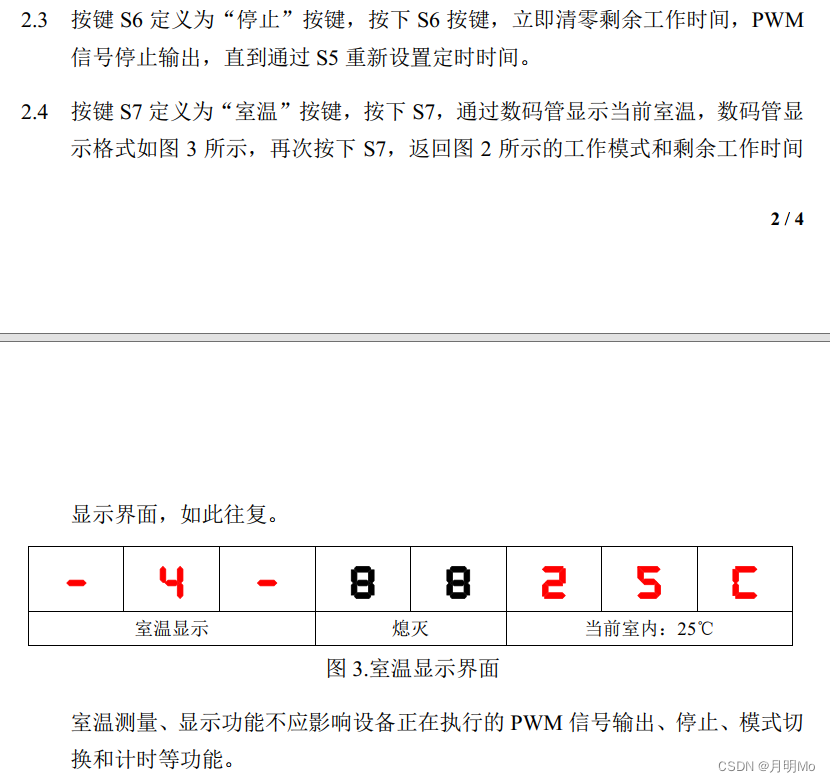
然后设置S6,S7两个按键。case 0x0e://S7 if(SMG_mode==0)SMG_mode=1; else SMG_mode=0; break; case 0x0d://S6 surplus_time=0; break;- 1
- 2
- 3
- 4
- 5
- 6
- 7
然后在主程序设置对应的数码管显示。
else if(SMG_mode==1) { SMG[0]=SMG[2]=21;SMG[1]=4; SMG[3]=20;SMG[4]=20; SMG[5]=temp/10; SMG[6]=temp%10; SMG[7]=22; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
做好这些之后,开始设计PWM波的模式还有,定时时间。我们用定时器0计时和产生PWM波。1KHZ为1ms,所以我们设置定时器时间为100us
uint t=0; //定义定时器计数 uint tt=0; //定义时间计时 //定时器0中断服务函数 void time0() interrupt 1 { t++; tt++; if(t==10)t=0; if(surplus_time!=0) { switch(work_mode) { case 1: if(t<=1) P34=1; //20% 2/10 else {P34=0;}break; case 2: if(t<=2) P34=1; //30% 3/10 else {P34=0;}break; case 3: if(t<=6) P34=1; //70% 7/10 else {P34=0;}break; } } if(tt>=10000){tt=0; if(surplus_time)surplus_time--;} //1s=10000*100us//1s=10000*100us }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26

设置LED指示灯的状态。switch(work_mode) { case 1:P2=0X80;P0=0XFE;break; //L1点亮 case 2:P2=0X80;P0=0XFD;break; //L2点亮 case 3:P2=0X80;P0=0XFB;break; //L3点亮 }- 1
- 2
- 3
- 4
- 5
- 6
完整程序
main.c
#include#include "intrins.h" #include "onewire.h" #define uchar unsigned char #define uint unsigned int void SMG_output(void); void init(void); void Delay1ms(void); void delay5ms(void); void Dkey_scan(void); void Timer0Init(void); uchar tab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,\ 0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10,0xff,0xbf,0xc6}; //- c uchar SMG[8]={20,20,20,20,20,20,20,20};//初始显示10,全息数码管 uchar SMG_mode=0,temp; //数码管模式定义 温度定义 uchar work_mode=1; //工作模式 uint surplus_time=0;//剩余时间定义 uint t=0; //定义定时器计数 uint tt=0; //定义时间计时 void main(void) { init(); //初始开发板 Timer0Init(); while(1) { temp=rd_temperature(); if(SMG_mode==0) { SMG[0]=SMG[2]=21;SMG[1]=work_mode; SMG[3]=20;SMG[4]=surplus_time/1000; SMG[5]=surplus_time%1000/100; SMG[6]=surplus_time%100/10; SMG[7]=surplus_time%10; } else if(SMG_mode==1) { SMG[0]=SMG[2]=21;SMG[1]=4; SMG[3]=20;SMG[4]=20; SMG[5]=temp/10; SMG[6]=temp%10; SMG[7]=22; } switch(work_mode) { case 1:P2=0X80;P0=0XFE;break; //L1点亮 case 2:P2=0X80;P0=0XFD;break; //L2点亮 case 3:P2=0X80;P0=0XFB;break; //L3点亮 } SMG_output(); Dkey_scan(); } } void Dkey_scan(void) { static uchar keybyte=0; static uchar key; if(((P3&0X0F)!=0X0F)&&(keybyte==0)) { delay5ms(); if((P3&0X0F)!=0X0F) { keybyte=1;key=P3&0x0f; } } if((keybyte==1)&&((P3&0X0F)==0X0F)) { if((P3&0X0F)==0X0F) { switch(key) { case 0x0e://S7 if(SMG_mode==0)SMG_mode=1; else SMG_mode=0; break; case 0x0d://S6 surplus_time=0; break; case 0x0b: //S5 surplus_time+=60; break; case 0x07: //S4 if(work_mode==1)work_mode=2; else if(work_mode==2)work_mode=3; else if(work_mode==3)work_mode=1; break; } keybyte=0; } } } //定时器0中断服务函数 void time0() interrupt 1 { t++; tt++; if(t==10)t=0; if(surplus_time!=0) { switch(work_mode) { //P2=0X80;P0=0XFD case 1: if(t<=1) {P34=1;} //20% 2/10 else {P34=0;}break; case 2: if(t<=2) {P34=1;} //30% 3/10 else {P34=0;}break; case 3: if(t<=6) {P34=1;} //70% 7/10 else {P34=0;}break; } } if(tt>=10000){tt=0; if(surplus_time)surplus_time--;} //1s=10000*100us } void Timer0Init(void) //100微秒@11.0592MHz { AUXR |= 0x80; //定时器时钟1T模式 TMOD &= 0xF0; //设置定时器模式 TL0 = 0xAE; //设置定时初值 TH0 = 0xFB; //设置定时初值 TF0 = 0; //清除TF0标志 TR0 = 1; //定时器0开始计时 EA=1;ET0=1; //打开定时器0中断 } void SMG_output(void) { uchar i; for(i=0;i<8;i++) { P2=(P2&0X1F)|0Xc0; P0=(1<<i); P2=(P2&0X1F)|0Xe0; P0=tab[SMG[i]]; Delay1ms(); } P2=(P2&0X1F)|0Xc0; P0=0Xff; P2=(P2&0X1F)|0Xe0; P0=0Xff; } void init(void) { P2=(P2&0X1F)|0XA0; P0=0X00; P2=(P2&0X1F)|0X80; P0=0Xff; P2=(P2&0X1F)|0Xc0; P0=0Xff; P2=(P2&0X1F)|0Xe0; P0=0Xff; } void Delay1ms(void) //@11.0592MHz { unsigned char i, j; _nop_(); _nop_(); _nop_(); i = 11; j = 190; do { while (--j); } while (--i); } void delay5ms(void) //@11.0592MHz { unsigned char i, j; i = 54; j = 199; do { while (--j); } while (--i); } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
onewire.h
#ifndef __ONEWIRE_H #define __ONEWIRE_H #includesbit DQ = P1^4; unsigned char rd_temperature(void); //; ; void Delay_OneWire(unsigned int t); unsigned char Read_DS18B20(void); bit init_ds18b20(void); void Write_DS18B20(unsigned char dat); #endif - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
onewire.c
#include "onewire.h" unsigned char rd_temperature(void) { unsigned char de,gao; init_ds18b20(); Write_DS18B20(0xcc); Write_DS18B20(0x44); init_ds18b20(); Write_DS18B20(0xcc); Write_DS18B20(0xbe); de=Read_DS18B20(); gao=Read_DS18B20(); return((de >>4)|(gao<<4)); } // void Delay_OneWire(unsigned int t) { t=t*8; while(t--); } // void Write_DS18B20(unsigned char dat) { unsigned char i; for(i=0;i<8;i++) { DQ = 0; DQ = dat&0x01; Delay_OneWire(5); DQ = 1; dat >>= 1; } Delay_OneWire(5); } // unsigned char Read_DS18B20(void) { unsigned char i; unsigned char dat; for(i=0;i<8;i++) { DQ = 0; dat >>= 1; DQ = 1; if(DQ) { dat |= 0x80; } Delay_OneWire(5); } return dat; } // bit init_ds18b20(void) { bit initflag = 0; DQ = 1; Delay_OneWire(12); DQ = 0; Delay_OneWire(80); DQ = 1; Delay_OneWire(10); initflag = DQ; Delay_OneWire(5); return initflag; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
工程文件
-
相关阅读:
unity 使用Vuforia扫描实体物体交互
Baklib|SaaS产品,实现企业流程数字化
Nacos安装教程
WEB 渗透之端口协议
Chromium VIZ工作流
Redis学习笔记(一) 基础数据类型
认识Ruby
计算机毕业设计ssm丢失宠物发布找寻平台7nk4i系统+程序+源码+lw+远程部署
GBase 8c 核心技术
HR应用在线人才测评,给企业招聘带来的好处
- 原文地址:https://blog.csdn.net/darlingqx/article/details/127569158