-
ubuntu 20.04 ROS 环境下 使用 velodyne
系统环境配置
安装ROS依赖
sudo apt install ros-noetic-velodyne- 1
成功提示:

安装驱动git clone https://github.com/ros-drivers/velodyne.git- 1
成功提示:
将功能包考在ros 的工作空间下面,然后进行编译。catkin_make- 1
硬件连接
找个电源适配器,9-18v给雷达供电。雷达连接其连接器,网口接到ROS的工控机上即可

网口配置
将工控机的网口配置为
ipv4,方式设置为手动
ip地址、掩码以及网关设置成下图

其中地址 不能为 192.168.1.201 ,这个是雷达的地址运行驱动程序
roslaunch velodyne_pointcloud VLP16_points.launch- 1
通过
rostopic list查看当前消息名称rostopic list- 1
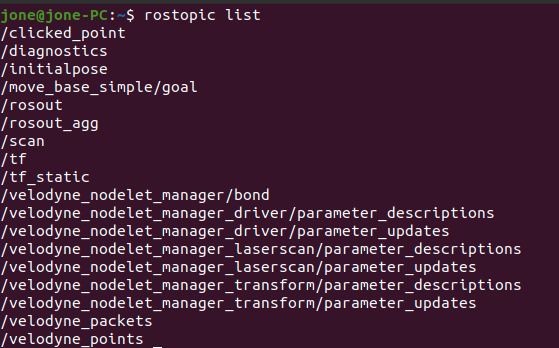
其中/velodyne_points就是 激光雷达发布的点云消息。通过rviz可视化点云
终端输入rviz,打开该软件
rviz- 1
Fiex Frame 写入 velodyne
添加 PointCloud2
Topic 选择 /velodyne_points
之后即可看到点云

-
相关阅读:
【pickle】详解python中的pickle模块(常用函数、示例)
代码随想录 Day-44|#70 爬楼梯(进阶)|#322 零钱兑换|#279 完全平方数
计算机组成原理之计算机系统概论、计算机的发展史、系统总线,三章开篇讲
EthernetIP 转MODBUS RTU协议网关连接FANUC机器人作为EthernetIP通信从站
SpringCloud - Spring Cloud Alibaba 之 SkyWalking 分布式链路跟踪;SkyWalking集群(十七)
亲测可用fiddler手机抓包配置代理后没有网络
九、池化层
redis源码阅读-zset
Hadoop3:HDFS、YARN、MapReduce三部分的架构概述及三者间关系(Hadoop入门必须记住的内容)
如何借助网关实现组态软件的摄像头视频监控?
- 原文地址:https://blog.csdn.net/qq_32761549/article/details/126488820