-
create® 3入门教程-自主充电
系列文章目录:
-
目录:
说明:
- 介绍如何自主充电
相关设备
- Turtlebot4机器人套件:采购地址
介绍:
-
Create® 3 机器人配备了一个充电桩,可在实验之间为其充电。
-
通过 ROS 2 API,用户可以命令对接和取消对接自主行为。
-
请注意,为了让机器人检测到充电桩、确定其位置并了解何时成功对接,充电桩必须连接到电源。
脱离对接
- 您可以使用以下 ROS 2 操作命令机器人取消停靠。
ros2 action send_goal /undock irobot_create_msgs/action/Undock "{}"-
机器人将向后移出充电桩,然后旋转 180 度。
-
如果机器人已脱离对接,此操作将失败。
对接
- 您可以使用以下 ROS 2 操作命令机器人停靠。
ros2 action send_goal /dock irobot_create_msgs/action/DockServo "{}"-
机器人将首先在其周围环境中搜索码头。请注意,如果机器人离码头太远,该操作将失败。/dock您可以通过订阅ROS 2 主题来检查 Dock 是否可见。
-
然后机器人将与码头对齐并小心地驶上码头。
-
如果机器人已经停靠,此操作将失败。
对接传感器数据
- Create® 3 机器人通过其 ROS 2 出版物公开了一些与对接相关的信息。这些应该允许用户编写自己的算法,考虑到环境中停靠的存在,甚至编写自己的停靠和取消停靠程序。
红外操作码
- Create® 3 扩展坞可传输多个 IR 信号。Create® 3 机器人配备了两个能够检测它们的不同传感器。
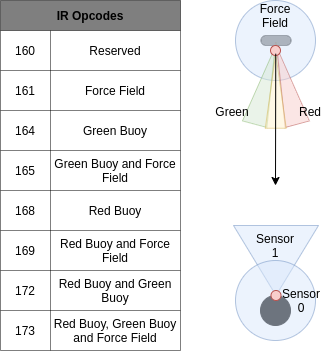
- 机器人将在/ir_opcodeROS 2 主题中发布这些信号。每条消息都将包含对其中一个信号的时间戳检测,包括检测到它的传感器的标识符
充电桩信息
- 更多高级信息由机器人在/dockROS 2 主题中生成。在这里,可以快速了解机器人是否能够从其当前位置看到码头,以及它当前是否停靠。
-
-
相关阅读:
小程序(开发必备常识)1
mybatis中#{}和${}的区别
JVM 创建对象时分配内存的几种方法、分配方法的选择
Vue3+Vue-i18n+I18N ALLY+VSCODE 自动翻译多国语言
Web自动化框架中验证码识别处理全攻略,让测试更得心应手!
Stream之flatMap用法
新人福利——OllyICE和xllydbg的区别和基本用法
Vue——状态管理库Pinia
尚医通 (二十八) --------- 医院管理相关 (引入注册中心、远程调用)
C++树详解
- 原文地址:https://blog.csdn.net/ncnynl/article/details/127306783