-
二十七、rqt常用插件
一、引言
rqt工具箱基于QT框架,有三大部分组成:
- rqt——核心实现,开发人员无需关注
- rqt_common_plugins——rqt 中常用的工具套件
- rqt_robot_plugins——运行中和机器人交互的插件(比如: rviz)
二、常用插件
- 启动rqt:
- 法一:
rqt - 法二:
rosrun rqt_gui rqt_gui
- 法一:
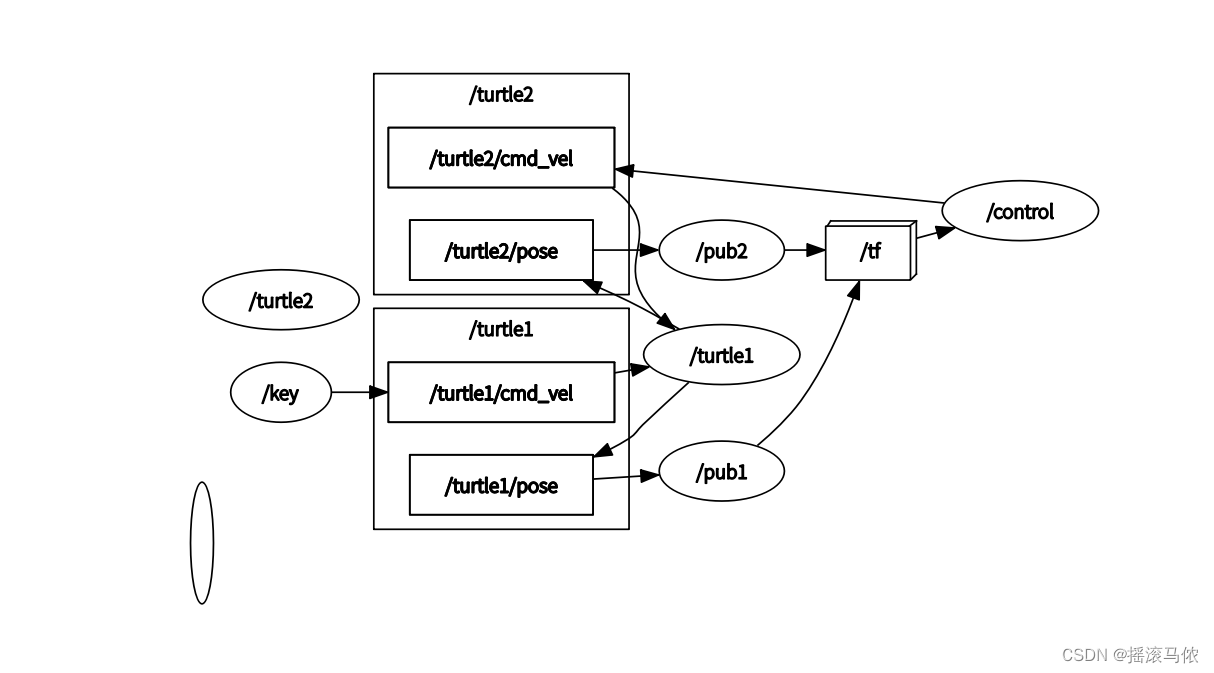
2.1 rqt_graph
- 作用:可视化显示计算图
- 椭圆表示节点,方框表示话题
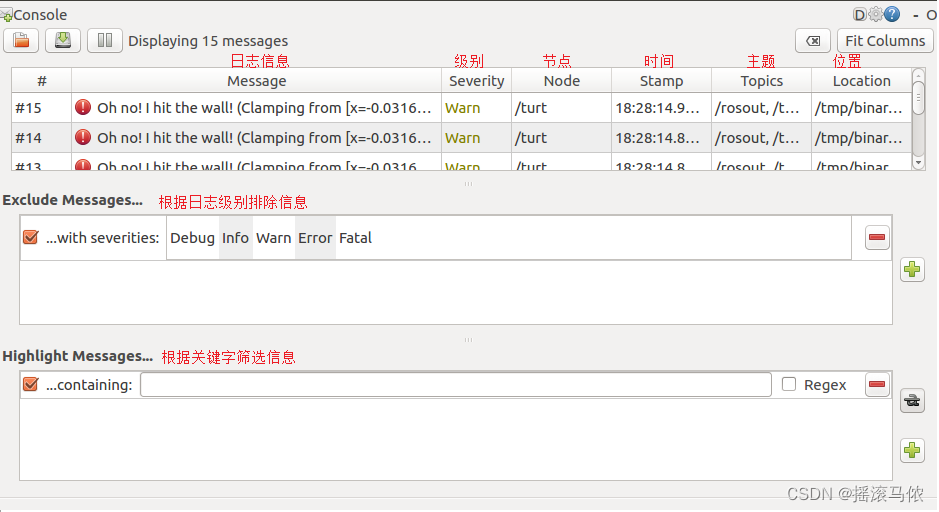
2.2 rqt_console
- 作用:显示和过滤日志
- 代码实现:
#include "ros/ros.h" int main(int argc, char *argv[]) { ros::init(argc, argv, "logo_demo"); ros::NodeHandle nh; ros::Rate r(0.3); while (ros::ok()) { // 默认不输出 ROS_DEBUG("debag message!"); ROS_INFO("info message!"); ROS_WARN("warn message!"); ROS_ERROR("error message!"); ROS_FATAL("fatal message!"); r.sleep(); } return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 运行结果:
[ INFO] [1664609956.033453791]: info message! [ WARN] [1664609956.033553987]: warn message! [ERROR] [1664609956.033610369]: error message! [FATAL] [1664609956.033676339]: fatal message!- 1
- 2
- 3
- 4
- 图形界面:
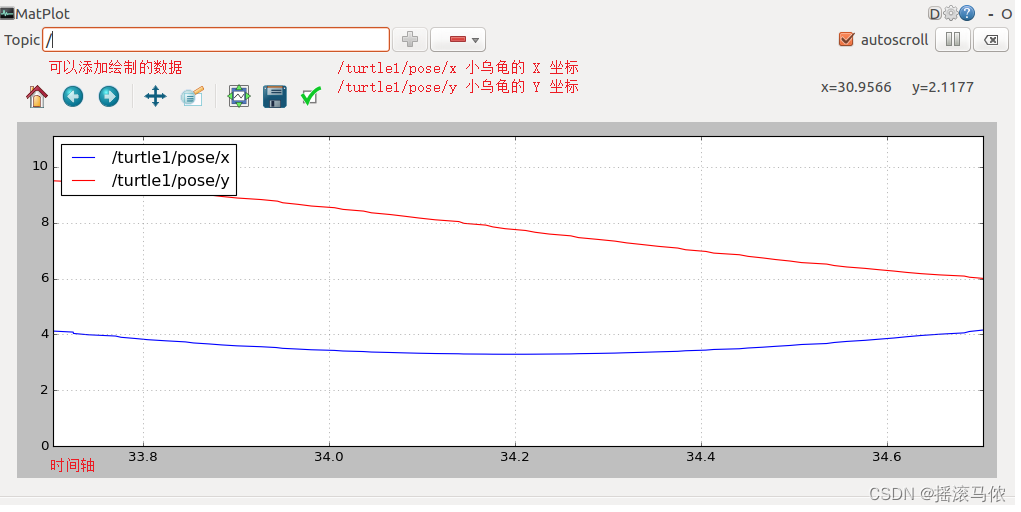
2.3 rqt_plot
- 作用:图形绘制插件
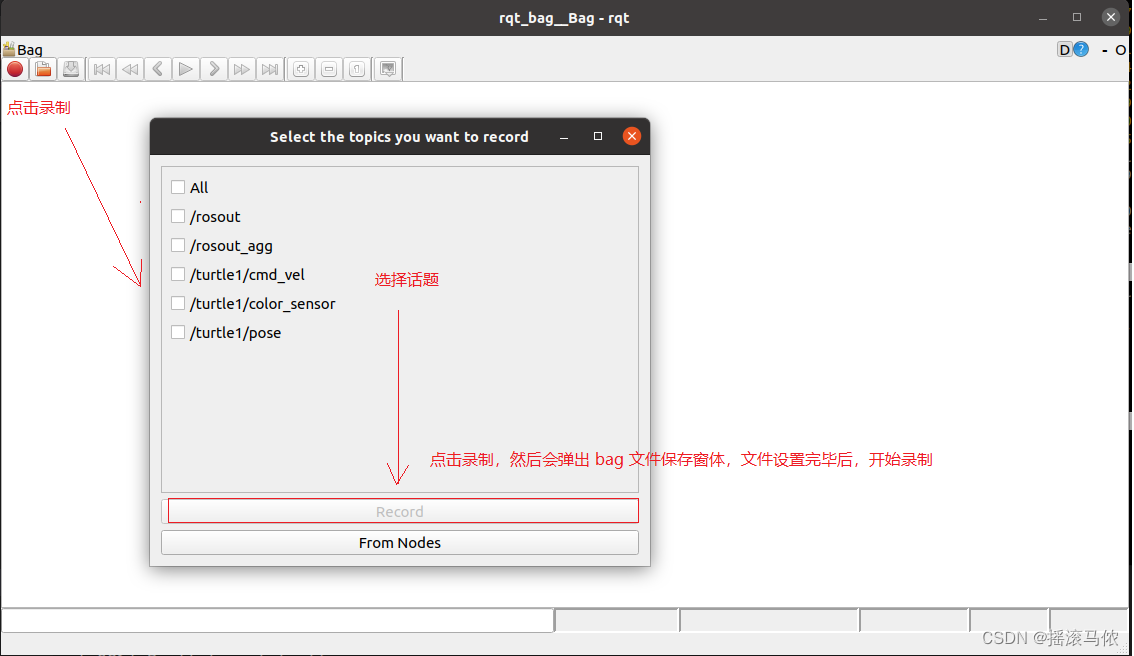
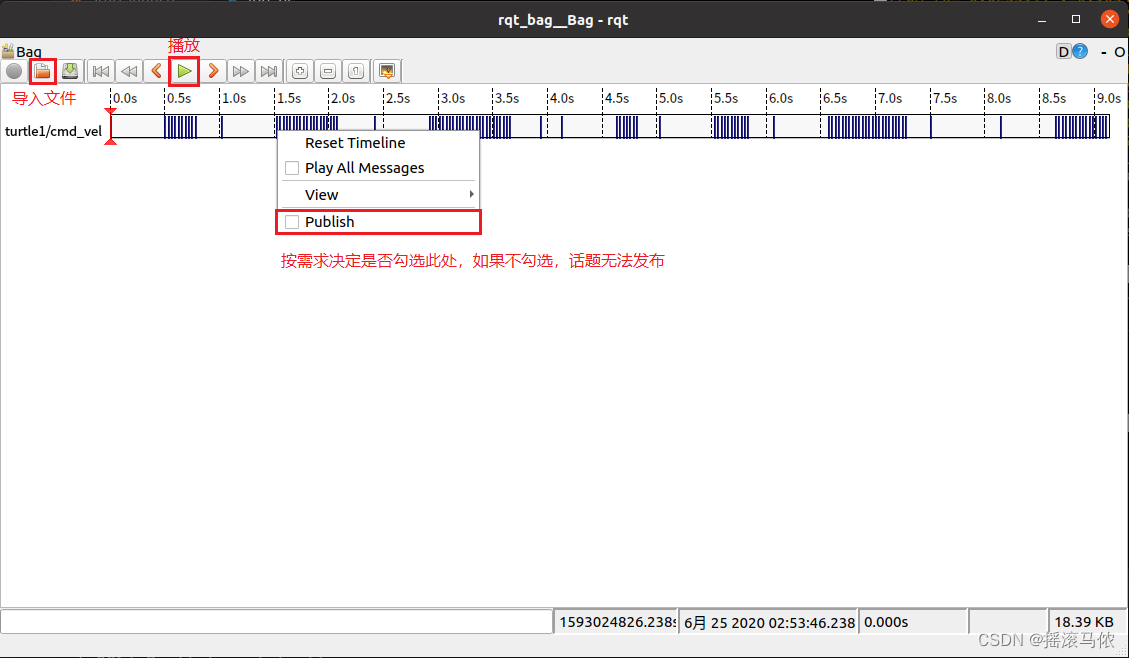
2.4 rqt_bag
- 作用:录制或重放bag文件
-
相关阅读:
浅浅懂了一些transformer中的self-attation
JavaScript数据结构与算法-排序全详解
【小程序项目开发-- 京东商城】uni-app开发之轮播图
Redis 数据类型
Win11怎么查MAC地址?Win11电脑如何查看mac地址?
CSRF防范介绍之一
Linux下Apache与Nginx服务器配置与优化
用几分钟时间了解何为优质低代码开发平台
【JavaScript】文本处理字符串的方法有了解多少
基于SpringMVC实现常见功能
- 原文地址:https://blog.csdn.net/qq_43280851/article/details/127134854
