-
循环神经网络(RNN)
前面总结的多层感知机(MLP)和卷积神经网络(CNN)本质上都是前馈神经网络,对于一组输入,得到一组输出,不会考虑前后输入数据之间的相关性。今天总结的循环神经网络(Recurrent Neural Network, RNN) 则是专门用于处理序列输入的神经网络,从直观上来看,序列输入(例如文本)是前后文相关的,而“循环”说明上一次的输出会重新作为这一次的输入,再次参与到运算中去,这样RNN就能够记忆之前的信息。
RNN网络结构
由于RNN是和“时间”(或者说“输入顺序”)有关的网络模型,因此下图的网络结构示意图中,左边部分表示了实际的网络结构,右边的展开部分表示了模型基于时间的计算过程。
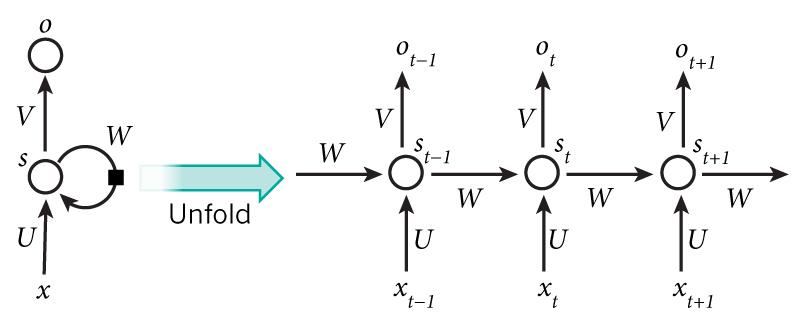
我们把RNN拆分成输入层、隐藏层和输出层。如果删掉循环连接( W W W对应的连接),那么上图(左)就变成了一个单纯的MLP,加上循环连接后,意味着模型必须保存上一时刻隐藏层的输出,并且在这一时刻作为隐藏层输入的一部分参与计算。用数学公式表示为
o t = g ( V ⋅ s t ) s t = f ( U ⋅ x t + W ⋅ s t − 1 ) 。 (1)\tag 1 otst=g(V⋅st)=f(U⋅xt+W⋅st−1)。(1)o t = g ( V ⋅ s t ) s t = f ( U ⋅ x t + W ⋅ s t − 1 ) 。
公式中的符号在结构示意图中都可以找到。可以看出,隐藏层的输出 s t s_t st与当前输入和之前的输入都有关。另外参数 U , V , W U,V,W U,V,W在任何时刻都是“共享”的。
训练方法(BPTT)
BPTT(Back-Propagation Through Time)本质上也是梯度下降的方法,只是由于引入了时间因素,当我们用误差函数对参数求梯度时,还应当追溯历史数据。假设 t t t时刻误差函数为 L t ( o t , y t ) L_t(o_t,y_t) Lt(ot,yt),那么“当前总误差”
L = ∑ i = 1 t L i , (2) L=\sum_{i=1}^{t}{L_i} \ , \tag 2 L=i=1∑tLi ,(2)
对于某个参数 W W W,通过求偏导 ∂ L ∂ W \frac{\partial L}{\partial W} ∂W∂L来对参数进行更新。因为 V V V与时间无关,所以其偏导也比较简单; U , W U,W U,W的偏导则相对复杂,举个栗子,根据公式(1), L 2 L_2 L2对 W W W的偏导
∂ L 2 ∂ W = ∂ L 2 ∂ s 2 ∂ s 2 ∂ W + ∂ L 2 ∂ s 2 ∂ s 2 ∂ s 1 ∂ s 1 ∂ W , (3) \frac{\partial L_2}{\partial W}=\frac{\partial L_2}{\partial s_2}\frac{\partial s_2}{\partial W} + \frac{\partial L_2}{\partial s_2}\frac{\partial s_2}{\partial s_1}\frac{\partial s_1}{\partial W}, \tag 3 ∂W∂L2=∂s2∂L2∂W∂s2+∂s2∂L2∂s1∂s2∂W∂s1,(3)
这是在时刻 2 2 2时,考虑时间序列的偏导结果,不难想象,对于 L t L_t Lt,需要依次考虑 s t , . . . , s 1 s_t,...,s_1 st,...,s1(因为他们都是 W W W的函数)对 W W W的偏导然后累加起来。而 ∂ L ∂ W \frac{\partial L}{\partial W} ∂W∂L又是对 ∂ L t ∂ W \frac{\partial L_t}{\partial W} ∂W∂Lt的一层累加。好在 ∂ L ∂ W \frac{\partial L}{\partial W} ∂W∂L的总公式最后能够化简,这里不详细追究了。公式(1)中的 g , f g,f g,f是激活函数,根据以前的经验, t t t长度的链式求导容易导致梯度消失或者梯度爆炸。
其它
粗略看了一下LSTM和Transformer,目前暂时没用到这些,先挖个坑,以后有时间或者需要的时候再补~
-
相关阅读:
新型基础测绘与实景三维中国建设技术文件【3】基础地理实体空间身份编码规则
前端爱心代码跟个风
IMU预积分在优化问题中的建模及外参标定
无法远程连接到kafka
1.1.1 linux基础
Redis——分布式缓存
企业级自定义表单引擎解决方案(十六)--Excel导入导出
.NET 7 RC 2 发布,倒计时一个月发布正式版
微分的定义和介绍
C语言——动态内存分配
- 原文地址:https://blog.csdn.net/dragonylee/article/details/127097087