-
Python实现基于DFS和BFS算法的吃豆人寻路实验
吃豆人寻路实验
一、实现 DFS 和 BFS
要优化之前首先要完成最基本的版本,因此首先完成了最基础的 dfs 和 bfs 的算法,算法的流程如下图:
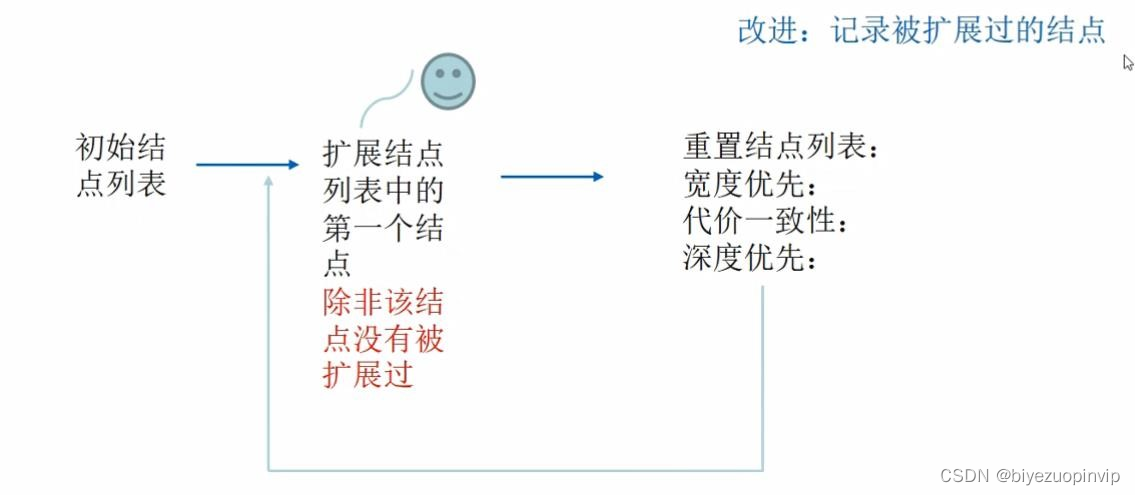
图 1 算法流程 需要注意的是,dfs 扩展节点的时候会把节点放在队列首位,并在下次立刻取出;bfs 则会把节点放在队列尾部,并且当前面的遍历完后才会取出,分别对应的是“先入后出”和“先入先出”,因此使用的数据结构分别是“栈”和“队列”。
1.1 伪代码
接下来展示 dfs 和 bfs 在该问题中的伪代码: 接下来展示 dfs 和 bfs 在该问题中的伪代码: 接下来展示 dfs 和 bfs 在该问题中的伪代码: 接下来展示 dfs 和 bfs 在该问题中的伪代码: 1.1.1 DFS 伪代码 1.1.2 BFS 伪代码 1.1.2 BFS 伪代码 定义 DFS 栈 定义 BFS 队列 定义 BFS 队列 定义结果栈 定义父亲节点字典 定义父亲节点字典 将起点放入栈 将起点放入队列 While 栈非空: While 队列非空: 取出栈顶节点,再放入 取出队列头节点,并删掉 标记该点被访问 标记该点被访问 If 到达终点: If 到达终点: 返回结果栈 根据字典,返回结果 对该节点进行扩展 对该节点进行扩展 For 每个扩展节点: For 每个扩展节点: If 扩展节点没被访问: If 扩展节点没被访问: 入栈顶 ; If 该节点没有扩展节点: ; DFS 栈中删除该节点 结果栈中删除该节点 入队尾 1.2 结果展示
分别对 dfs 和 bfs 进行测试,可以得到下面的结果
1.2.1 DFS扩展结果

图 1 普通 dfs 小地图

图 2 普通 dfs 中地图

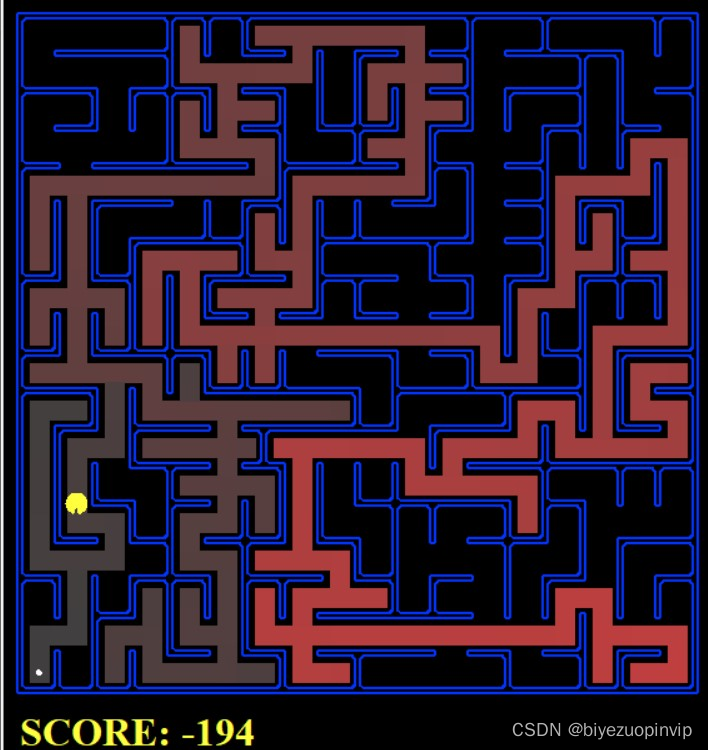
图 3 普通 dfs 大地图
1.2.2 BFS扩展结果

图 4 普通 bfs 小地图

图 5 普通 bfs 中地图

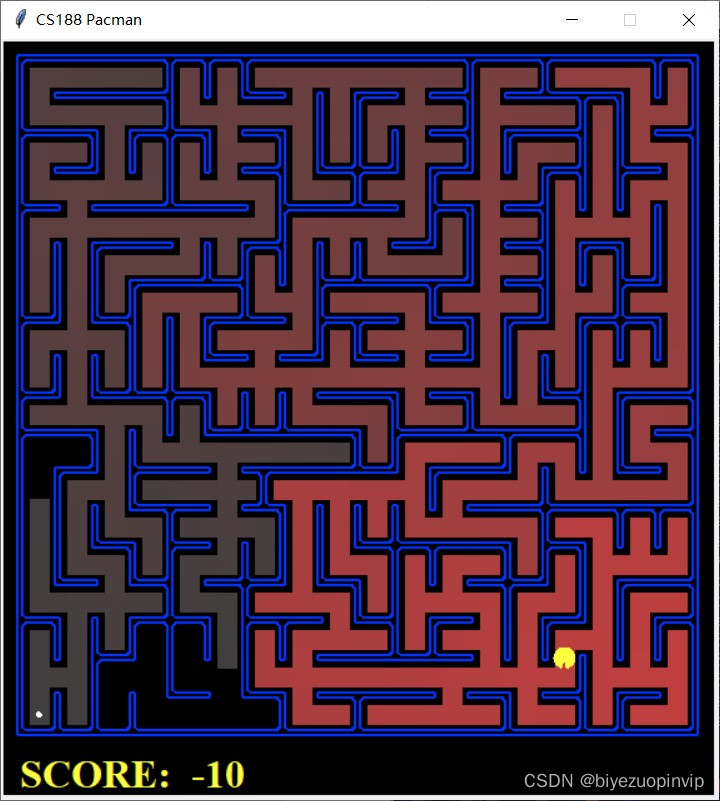
图 6 普通 bfs 大地图
接下来是地图遍历过程的展示
1.2.3 地图展示:
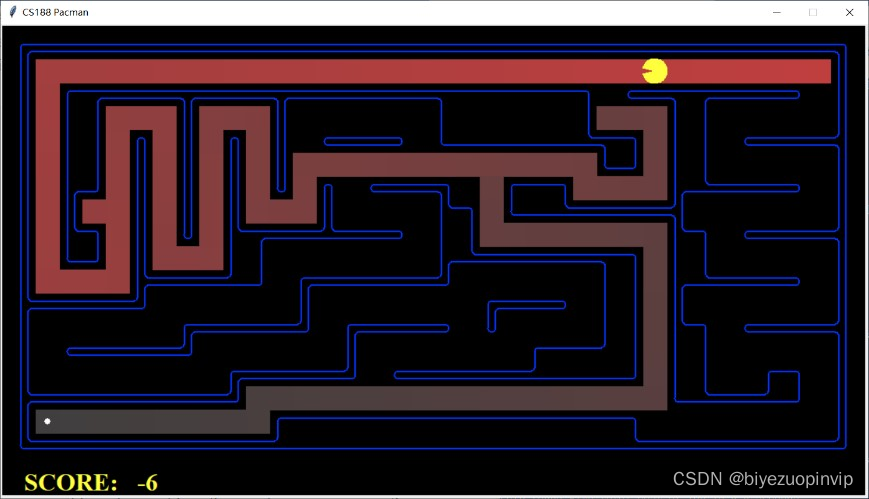
图 7 地图可视化结果
上图展示的地图结果,左边都是 dfs 的搜索方式,右边都是 bfs 的搜索方式,可以看到 dfs 的搜索策略经常是一条路走到黑,直到找到终点。而 bfs 会搜索全部可以到达的地点,直到找到终点。
这里需要说明的是,无论是 dfs 还是 bfs 我都只是单纯的设置“找到终点后就退出”,因此没有遍历完全部的路径,因为从道理上来说,dfs 和 bfs 的搜索方式都属于全部搜索的暴力式搜索,理应搜索出全部能到达终点的路径,并存起来,判断得到最优路径的。
二、对算法进行优化
在优化的过程中我询问了 111172 班的汪圣翔关于 DFS 优化的问题,最终达成共识 DFS 似乎没法进行优化…我的理解是这样的: 由于 DFS 的定义是在每次扩展的时候,直接对第一个被扩展到的节点进行向下搜索,因此 DFS 没有选择的余地。而对于 BFS 来说,它会列出所有被扩展到的节点,这样一来,就有了使用评价函数进行优化的余地了,可以在这一步对节点进行排序,将评价更高的节点进行扩展,这样就能比原来更快地找到到达终点的路径。
我一共写了三种优化方式,分别是贪心和 A*,用到了 util 中提供的优先队列的定义。这里只需要将各自的评价函数进行定义,就可以得到符合该算法的优先队列了,我的函数定义如下:
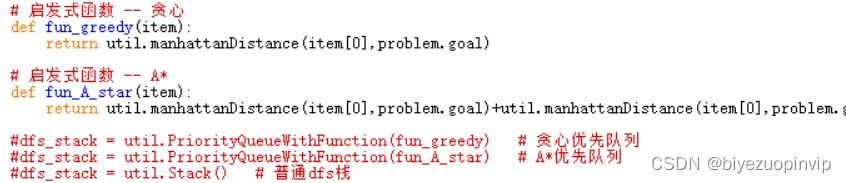
图 8 启发式函数以及优先队列的定义,由于是在 DFS 的函数里面写的这个算法,因此变量名沿用了 dfs_stack 这个叫法 将启发函数定义翻译成中文,如下:
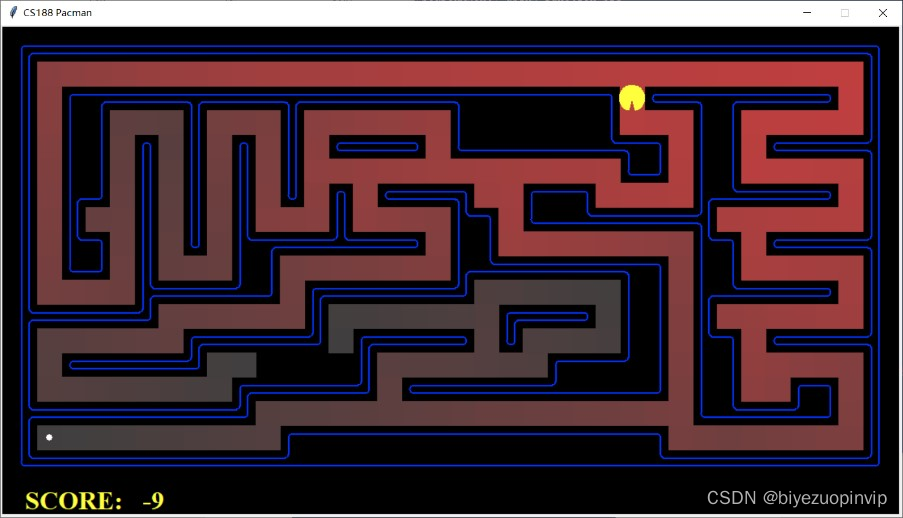
贪心:从该节点到终点的曼哈顿距离 A*: 从该节点到终点的曼哈顿距离 + 从该节点到起点的曼哈顿距离接下来是三种优化的结果展示,如下图所示:
2.1 贪心优化
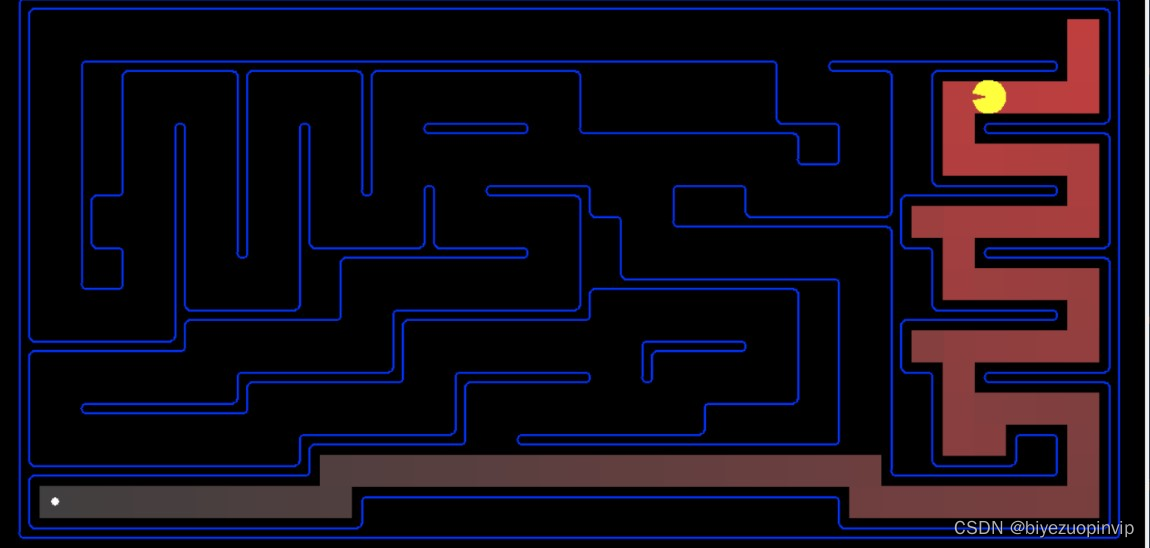

图 8 贪心优化 中地图
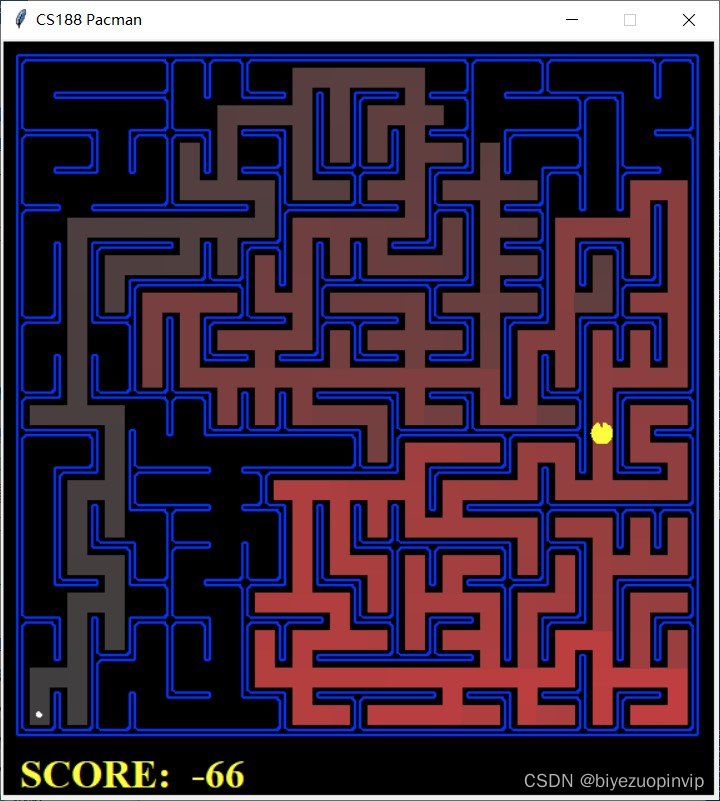

图 9 贪心优化 大地图
2.2 *优化

图 10 A*优化 中地图
-
相关阅读:
vs2013的使用及编译中遇到的问题
前端开发工程师:职业前景、工资、 具体工作
企业电子招标采购系统源码Spring Boot + Mybatis + Redis + Layui + 前后端分离 构建企业电子招采平台之立项流程图
windows设置右键打开 vscode的方法(简易版)
MySQL阅读网上MySQL文章有感的杂记
【Qt开发流程之】窗口部件
【python学习】基础篇-常用模块-subprocess模块:创建和管理子进程
朋友圈折叠怎么办?
【MySQL】20-MySQL如何创建和管理表超详细汇总
Packet Tracer - 综合技能练习(练习 OSPFv2 和 OSPFv3 配置)
- 原文地址:https://blog.csdn.net/newlw/article/details/126907573