-
史上最简SLAM零基础解读(8) - g2o(图优化)→示例代码讲解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始
文末正下方中心提供了本人 联系方式, 点击本人照片即可显示 W X → 官方认证 {\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证} 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证
一、前言
示例代码为 https://github.com/gaoxiang12/slambook2/blob/master/ch6/g2oCurveFitting.cpp
在g2o简介的博客中,讲解了运行该示例代码环境的搭建,同时对 g2o 进行了简单的讲解。然后又对 顶点 ( V e r t e x ) \color{red}顶点 (Vertex) 顶点(Vertex) 与 边 ( E d g e ) \color{red}边(Edge) 边(Edge) 进行详细分析,总的来说使用 g2o 进行优化,编程求解主要包含五个步骤,来看看代码编程的流程:
( 1 ) \color{blue} (1) (1) 顶点和边的类型定义;
( 2 ) \color{blue} (2) (2) 构建图优化实例,配置求解器;
( 3 ) \color{blue} (3) (3) 添加点和边,构建求解图;
( 4 ) \color{blue} (4) (4) 执行优化。
后续,会把源码拆解成这四个部分,分别进行讲解。在这之前,先说一下示例代码的目的。虽然前面的博客已经把代码运行了起来,但是并没有讲具体实现是的功能是什么。假设一条满足以下方程的曲线:
y = exp ( a x 2 + b x + c ) + w (01) \color{green} \tag{01} y=\exp \left(a x^{2}+b x+c\right)+w y=exp(ax2+bx+c)+w(01)其中 a , b , c a,b,c a,b,c 为曲线的参数, w w w 为高斯噪声,满足 w ∼ ( 0 , σ 2 ) w \sim\left(0, \sigma^{2}\right) w∼(0,σ2)。我们故意选择了这样一个非线性模型,使问题不至于太简单。现在,假设我们有 N N N 个关于 x , y x,y x,y 的观测数据点,想根据这些数据点求出曲线的参数。那么,可以求解下面的最小二乘问题以估计曲线参数: min a , b , c 1 2 ∑ i = 1 N ∥ y i − exp ( a x i 2 + b x i + c ) ∥ 2 (02) \color{green} \tag{02} \min _{a, b, c} \frac{1}{2} \sum_{i=1}^{N}\left\|y_{i}-\exp \left(a x_{i}^{2}+b x_{i}+c\right)\right\|^{2} a,b,cmin21i=1∑N∥ ∥yi−exp(axi2+bxi+c)∥ ∥2(02)请注意,在这个问题中,待估计的变量是 a , b , c a,b,c a,b,c;而不是 x x x。我们的程序里先根据模型生成 x , y x,y x,y 的真值,然后在真值中添加高斯分布的噪声。使用 g2o 从带噪声的数据拟合参数模型。定义误差为: e i = y i − exp ( a x i 2 + b x i + c ) (03) \color{green} \tag{03} e_{i}=y_{i}-\exp \left(a x_{i}^{2}+b x_{i}+c\right) ei=yi−exp(axi2+bxi+c)(03)那么,可以求出每个误差项对于状态变量的导数:
∂ e i ∂ a = − x i 2 exp ( a x i 2 + b x i + c ) ∂ e i ∂ b = − x i exp ( a x i 2 + b x i + c ) ∂ e i ∂ c = − exp ( a x i 2 + b x i + c ) (04) \color{green} \tag{04}∂a∂ei=−xi2exp(axi2+bxi+c)∂b∂ei=−xiexp(axi2+bxi+c)∂c∂ei=−exp(axi2+bxi+c)(04)∂ e i ∂ a = − x i 2 exp ( a x i 2 + b x i + c ) ∂ e i ∂ b = − x i exp ( a x i 2 + b x i + c ) ∂ e i ∂ c = − exp ( a x i 2 + b x i + c )
下面就从每个步骤来分析吧,这里就不在粘贴整体的源码了,前面链接已经给出。如果对Jacobian matrix(雅可比矩阵)不太熟悉的朋友,建议先阅读下面这篇博客。推荐 \color{red}推荐 推荐:史上最简SLAM零基础解读(7) - Jacobian matrix(雅可比矩阵) → 理论分析与应用详解
二、数据模拟
首先需要去模拟一些数据,假设(01)式中真实的 a b c _ r = { a = 1.0 , b = 2.0 , b = 1.0 } abc\_r=\{a=1.0,b=2.0,b=1.0\} abc_r={a=1.0,b=2.0,b=1.0},需要优化的初始值设定为 a b c _ e = { a = 2.0 , b = − 1.0 , c = 5.0 } abc\_e=\{a = 2.0,b = -1.0,c= 5.0\} abc_e={a=2.0,b=−1.0,c=5.0}。 也就是说,通过优化之后,使得 a b c _ e abc\_e abc_e 接近于 a b c _ r abc\_r abc_r。现在利用 a b c _ r abc\_r abc_r 随机生成 N = 100 N=100 N=100 组数据(同时添加了噪声)。代码如下:
double ar = 1.0, br = 2.0, cr = 1.0; // 真实参数值 double ae = 2.0, be = -1.0, ce = 5.0; // 估计参数值 int N = 100; // 数据点 double w_sigma = 1.0; // 噪声Sigma值 double inv_sigma = 1.0 / w_sigma; cv::RNG rng; // OpenCV随机数产生器 vector<double> x_data, y_data; // 数据 for (int i = 0; i < N; i++) { double x = i / 100.0; x_data.push_back(x); y_data.push_back(exp(ar * x * x + br * x + cr) + rng.gaussian(w_sigma * w_sigma)); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
三、点和边的类型定义
1、顶点类型的定义
// 曲线模型的顶点,模板参数:优化变量维度和数据类型 class CurveFittingVertex : public g2o::BaseVertex<3, Eigen::Vector3d> { public: //类成员变量如果是固定大小对象需要加上 EIGEN_MAKE_ALIGNED_OPERATOR_NEW EIGEN_MAKE_ALIGNED_OPERATOR_NEW // 重置;override 重载 virtual void setToOriginImpl() override { _estimate << 0, 0, 0; } // 更新 virtual void oplusImpl(const double *update) override { _estimate += Eigen::Vector3d(update); } // 存盘和读盘:留空 virtual bool read(istream &in) {} virtual bool write(ostream &out) const {} };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
顶点类成员继承继承自BaseVertex,模板成员参数分别是 3,Eigen::Vector3d。其表示的意思是待优化变量类型为 Eigen::Vector3d,维度是3。另外顶点类包含四个重要的成员函数需要重载:
( 1 ) \color{blue} (1) (1) setToOriginImp()用于重置优化变量值。(改)
( 2 ) \color{blue} (2) (2) oplusImpl()用于对优化变量进行更新调整,是优化变量向真实值靠近(改)
( 3 ) \color{blue} (3) (3) read和write分别是读盘、存盘函数,一般情况下不需要进行读/写操作的话,仅仅声明一下就可以.2、边类型的定义
// 误差模型 模板参数:观测值维度,类型,连接顶点类型 class CurveFittingEdge : public g2o::BaseUnaryEdge<1, double, CurveFittingVertex> { public: //类成员变量如果是固定大小对象需要加上 EIGEN_MAKE_ALIGNED_OPERATOR_NEW EIGEN_MAKE_ALIGNED_OPERATOR_NEW //构造函数初始化 CurveFittingEdge(double x) : BaseUnaryEdge(), _x(x) {} // 计算曲线模型误差 virtual void computeError() override { //顶点获取 const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]); //优化变量获取 const Eigen::Vector3d abc = v->estimate(); //惨差计算 _error(0, 0) = _measurement - std::exp(abc(0, 0) * _x * _x + abc(1, 0) * _x + abc(2, 0)); } // 计算雅可比矩阵 virtual void linearizeOplus() override { //顶点获取 const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]); //优化变量获取 const Eigen::Vector3d abc = v->estimate(); //数值求导 double y = exp(abc[0] * _x * _x + abc[1] * _x + abc[2]); _jacobianOplusXi[0] = -_x * _x * y; _jacobianOplusXi[1] = -_x * y; _jacobianOplusXi[2] = -y; } //读写,暂时不用,留空 virtual bool read(istream &in) {} virtual bool write(ostream &out) const {} private: double _x; // x 值, y 值为 _measurement };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
边类成员继承继承自BaseUnaryedge(不同类型的边有不同的基类,这里是一元边基类),模板成员参数分别是:1,double, CurveFittingVertex。这里的1表示观测变量维度,double 表示观测变量数据类型。CurveFittingVertex 表示前面定义的顶点类型。边类包含四个重要的成员函数需要重载:
( 1 ) \color{blue} (1) (1) virtual void computeError(); 计算惨差,通过成员变量_vertices[0]和顶点编号0获取0号顶点变量;之后通过estimate()成员函数获取最近的优化变量;最后通过 _measurement中存储的观测变量与优化变量做参差计算并传给_error(0, 0)。(改)
( 2 ) \color{blue} (2) (2) virtual void linearizeOplus(); 同样获取顶点并获取待优化的变量,最后通过数值求导获取雅克比梯度,注意这里需要添加负号,利用负梯度方向迭代。(改)
( 3 ) \color{blue} (3) (3) read 、write留空。
四、构建图优化实例,配置求解器
// 第二部分;配置优化器,构建图优化 // 定义重载求解变量块,每个误差项优化变量维度为3,误差值维度为1 typedef g2o::BlockSolver<g2o::BlockSolverTraits<3, 1>> BlockSolverType; // 定义线性求解器类型 typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; //创建高斯牛顿求解器 auto solver = new g2o::OptimizationAlgorithmGaussNewton(g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>())); // 图模型 //创建稀疏优化器 g2o::SparseOptimizer optimizer; // 设置求解器 optimizer.setAlgorithm(solver); // 打开调试输出 optimizer.setVerbose(true);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
( 1 ) \color{blue} (1) (1) 定义变量块BlockSolverType,模板参数分别表示
①优化变量维度(3)
②误差变量维度(1)( 2 ) \color{blue} (2) (2) 定义线性求解器LinearSolverType。
( 3 ) \color{blue} (3) (3) 选取求解方法。
( 4 ) \color{blue} (4) (4) 创建并配置稀疏优化器。
五、添加点和边
// 第三部分;添加点和边 // 实例化顶点,往图中增加顶点 CurveFittingVertex *v = new CurveFittingVertex(); //配置初始估计值 v->setEstimate(Eigen::Vector3d(aest, best, cest)); //设置图表中节点的id确保更改id后图表保持一致 v->setId(0); //添加设置完成的顶点 optimizer.addVertex(v); // 往图中增加边 for (int i = 0; i < PointNum; i++) { //实例化边,并传入标点值 CurveFittingEdge *edge = new CurveFittingEdge(x_data[i]); //设置图表中边的id确保更改id后图表保持一致 edge->setId(i); // 设置连接的顶点,1、顶点编号2、顶点实例化 edge->setVertex(0, v); // 传入观测到的数值 edge->setMeasurement(y_data[i]); // 设置信息矩阵:协方差矩阵之逆 edge->setInformation(Eigen::Matrix<double, 1, 1>::Identity() * 1 / (w_sigma * w_sigma)); //将设置完成的边加入 optimizer.addEdge(edge); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
( 1 ) \color{blue} (1) (1) 实例化一个点v;传入优化变量的初始估计值;给顶点配置编号;将顶点添加至图中。
( 2 ) \color{blue} (2) (2) 实例化边edge;给边配置编号;配置链接的顶点信息(顶点的编号,顶点的实例化);传入观测值;配置信息矩阵;将边添加至图。六、添加点和边
执行优化与输出:
// 执行优化 cout << "start optimization" << endl; chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); optimizer.initializeOptimization(); optimizer.optimize(10); //优化次数 chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "solve time cost = " << time_used.count() << " seconds. " << endl; // 输出优化值 Eigen::Vector3d abc_estimate = v->estimate(); cout << "estimated model: " << abc_estimate.transpose() << endl;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
答应结果如下
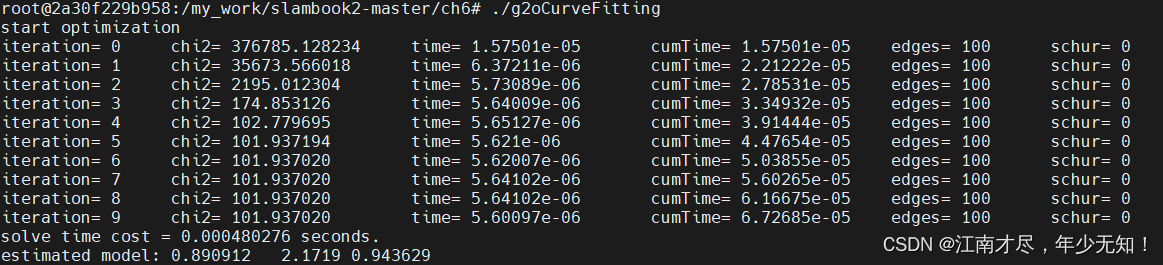
最终预测的结果为 a = 0.89012 , b = 2.1719 , c = 0.943629 a=0.89012,b=2.1719,c=0.943629 a=0.89012,b=2.1719,c=0.943629。可以看到其与真实值 a b c _ r = { a = 1.0 , b = 2.0 , b = 1.0 } abc\_r=\{a=1.0,b=2.0,b=1.0\} abc_r={a=1.0,b=2.0,b=1.0} 还是存在一定差距,但是已经非常接近了。其主要原因是因为生成的数据带噪声的,宁外我们只优化迭代了10次。七、结语
通过前面两篇博客,可以说是对 g2o(图优化) 有了简单的了解,g2o(图优化) 在 slam 中有着举足轻重的地位。如果要去追根究底底层的源码,说实话,难度还是比较大的。但是如果只是当作一个工具包来使用,还是比较简单的。主要的难点在于顶点和边的创建。不过没有关系,等大家看别人的源码看得比较多了,就熟悉 g2o(图优化) 具体应该怎么去使用与设计了。
-
相关阅读:
如何使PoE交换机连接稳定?
Ubuntu离线或在线安装CMake
【jvm】记一次hive堆heap内存溢出的排查
说JS作用域,就不得不说说自执行函数
try-with-resources
【计算机网络】局域网体系结构、以太网Ethernet详解
Spring之AOP源码解析(中)
java 特点了解及 JDK 初谈(程序员必看!)
深入理解计算系统第三章程序的机器级表达总结
JavaScript解密:《异人之下》故事中的编码之谜
- 原文地址:https://blog.csdn.net/weixin_43013761/article/details/126869494