-
[数据结构]哈希
一、哈希概念
顺序结构以及平衡树中,元素关键码与其存储位置之间没有对应的关系,因此在查找一个元素时,必须要经过关键码的多次比较。顺序查找时间复杂度为O(N),平衡树中为树的高度,即O(logN),搜索的效率取决于搜索过程中元素的比较次数。
理想的搜索方法:可以不经过任何比较,一次直接从表中得到要搜索的元素。 如果构造一种存储结构,通过某种函数(hashFunc)使元素的存储位置与它的关键码之间能够建立一一映射的关系,那么在查找时通过该函数可以很快找到该元素。
向该结构中插入元素(根据待插入元素的关键码,以此来计算出该元素的存储位置并按此位置进行存放)搜索元素(对元素的关键码进行同样的计算,把求得的函数值当做元素的存储位置,在结构中按此位置取元素比较,若关键码相等,则搜索成功)该方式即为 哈希(散列) 方法。
哈希方法中使用的转换函数称为哈希(散列)函数,构造出来的结构叫做哈希表(Hash Table)或称为散列表
例如有一个
数组arr[] = { 1,7,6,4,5,9 };
将哈希函数设置为:hash(key)= key % capacity;其中capacity为存储元素底层空间的总大小
在这里我们设置capacity为10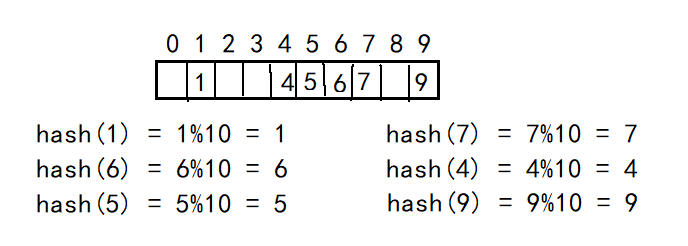
如果在插入一个元素44会出现什么问题?—— hash(44) = 44 % 10 = 4这样子计算出相同的地址了,就出现问题了——哈希冲突
二、哈希冲突
对于两个数据元素的关键字和 (Ki != Kj),有 Ki != Kj,但有:Hash(Ki) == Hash(Kj),即:不同关键字通过相同哈希数计算出相同的哈希地址,该种现象称为哈希冲突或哈希碰撞。
把具有不同关键码而具有相同哈希地址的数据元素称为“同义词”。发生了哈希冲突如何解决?
解决哈希冲突的两种常见方法是:闭散列和开散列
三、哈希冲突解决
3.1 闭散列
闭散列:也叫开放定址法,当发生哈希冲突时,如果哈希表未被装满,说明在哈希表中必然还有空位置,那么可以把key存放到冲突位置中的“下一个” 空位置中去。那如何寻找下一个空位置呢?
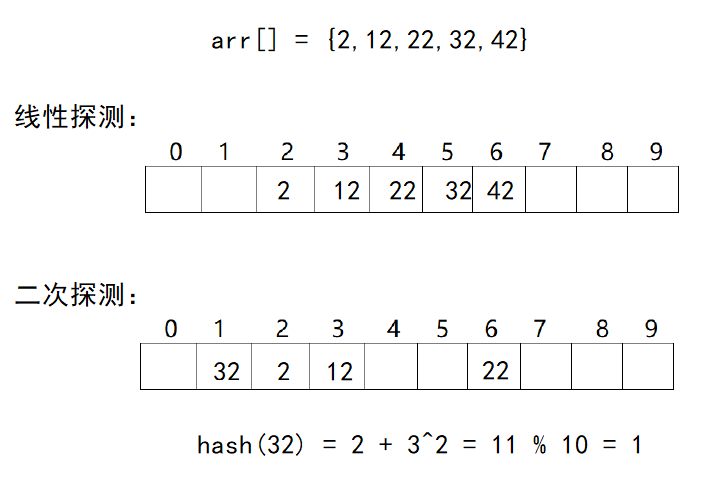
3.1.1 线性探测
线性探测:从发生冲突的位置开始,依次向后探测,直到寻找到下一个空位置为止。
enum Status { EXIST, EMPTY, DELETE }; template <class K, class V> struct HashDate { pair<K, V> _kv; Status _status; }; template<class K, class V> class HashTable { public: bool Insert(const pair<K, V>& kv) { size_t start = kv.first % _tables.size(); size_t i = 0; size_t index = start + i; // 第一次探测就是0的位置 /* size_t i = kv.first % _tables.capacity(); 不能模上capacity 因为vector中的capacity后面都是无法用[]去访问的 vector中[]能直接访问的元素都是在size()内 比如下列代码: vectorv; v.reserve(10); 这里的用法是错误的,访问不了capacity内元素 v.resize(10); 这里才是正确的,开空间+初始化,[]才能去访问 for (int i = 0; i < 10; ++i) { cin >> v[i]; } 因此要注意vector中[]能访问的一定是v.size(); */ // 线性探测法 while (_tables[index]._status == EXIST) // 存在就继续探测 { // start位置存在数据的情况下是不能添加元素,所以要继续探测 i++; index = start + i; // 当前位置已经存在了 index %= _table.size(); // 越界了以后再从头开始 } _talbes[index]._kv = kv; _talbes[index]._status = EXIST; ++_n; } private: vector<HashDate<K, V>> _tables; size_t _n = 0; // 有效数据个数 };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
但是这样子也有一定程度的缺陷:

线性探测优点:实现非常简单,
线性探测缺点:一旦发生哈希冲突,所有的冲突连在一起,容易产生数据“堆积”,即:不同关键码占据了可利用的空位置,使得寻找某关键码的位置需要许多次比较,导致搜索效率降低。如何缓解呢?3.1.2 二次探测
在线性探测中,我们使用的方法是:start + i (i = 0,1,2,…)
改进为二次探测后,我们使用的方法是:start + i ^ 2 (i = 0,1,2,…)
哈希表什么情况下进行扩容?如何扩容?
散列表的载荷因子定义为:α = 填入表中元素个数 / 散列表的长度
α是散列表装满程度的标志因子。由于表长是定值,α与"填入表中元素个数 "成正比,因此α越大,表明填入表中的元素越多,产生冲突的可能性就越大;α越小,表明填入表中的元素越少,产生冲突的可能性就越小。实际上散列表的平均查找长度是载荷因子α的函数,只是不同处理冲突的方法有不同的函数。对于开放定址法,载荷因子是特别重要因素,应严格限制在0.7 - 0.8以下,超过0.8查表时的CPU缓存不命中(cache missing)按照指数曲线上升。超过后要扩容散列表
bool Insert(const pair<K, V>& kv) { // 进行扩容,乘以10是为了防止 3 / 7 == 0的情况 // 负载因子到0.7就扩容 // 负载因子越小,冲突概率越低,效率越高,空间浪费越高 if (_tables.size() == 0 || _n * 10 / _tables.size() >= 7) // 控制载荷因子 { size_t newSize = _tables.size() == 0 ? 10 : _tables.size() * 2; // 这里能直接使用resize吗?——不行,此时映射全打乱了(需要重新映射) // 比如原先是2的位置 此时12 / 20 = 12就去12位置了,就不一样了 vector<HashDate<K, V>> newTables; newTables.resize(newSize); // 然后遍历原表,将原表中的数据,重新按newSize映射到新表 for (size_t i = 0; i < _tables.size(); ++i) { // 这里要重新写下面的插入 } _tables.swap(newTables); } size_t start = kv.first % _tables.size(); size_t i = 0; size_t index = start + i; // 第一次探测就是0的位置 /* size_t i = kv.first % _tables.capacity(); 不能模上capacity 因为vector中的capacity后面都是无法用[]去访问的 vector中[]能直接访问的元素都是在size()内 比如下列代码: vectorv; v.reserve(10); 这里的用法是错误的,访问不了capacity内元素 v.resize(10); 这里才是正确的,开空间+初始化,[]才能去访问 for (int i = 0; i < 10; ++i) { cin >> v[i]; } 因此要注意vector中[]能访问的一定是v.size(); */ // 线性探测法 while (_tables[index]._status == EXIST) // 存在就继续探测 { // start位置存在数据的情况下是不能添加元素,所以要继续探测 i++; // index = start + i; // 当前位置已经存在了 index = start + i * i; // 改为二次探测——就改动这里 index %= _tables.size(); // 越界了以后再从头开始 } _talbes[index]._kv = kv; _talbes[index]._status = EXIST; ++_n; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
上述代码十分复杂,因此进行一些改进:
template<class K, class V> class HashTable { public: bool Insert(const pair<K, V>& kv) { // 进行扩容,乘以10是为了防止 3 / 7 == 0的情况 // 负载因子到0.7就扩容 // 负载因子越小,冲突概率越低,效率越高,空间浪费越高 if (_tables.size() == 0 || _n * 10 / _tables.size() >= 7) // 控制载荷因子 { size_t newSize = _tables.size() == 0 ? 10 : _tables.size() * 2; HashTable<K, V> newHT; newHT._tables.resize(newSize); for (size_t i = 0; i < _tables.size(); ++i) { if (_tables[i]._status == EXIST) { newHT.Insert(_tables[i]._kv); } } _tables.swap(newHT._tables); // this-> ... } size_t start = kv.first % _tables.size(); size_t i = 0; size_t index = start + i; // 第一次探测就是0的位置 // 线性探测法 while (_tables[index]._status == EXIST) // 存在就继续探测 { // start位置存在数据的情况下是不能添加元素,所以要继续探测 i++; // index = start + i; // 当前位置已经存在了 index = start + i * i; // 改为二次探测——就改动这里 index %= _tables.size(); // 越界了以后再从头开始 } _tables[index]._kv = kv; _tables[index]._status = EXIST; ++_n; return true; } private: vector<HashDate<K, V>> _tables; size_t _n = 0; // 有效数据个数 };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
哈希表扩容的时候,我们可以直接复用insert,直接将数据拷贝下来在以上的功能中,我们再加入find函数和erase函数,因此哈希实现如下:
#pragma once #include#include using namespace std; enum Status { EXIST, EMPTY, DELETE }; template <class K, class V> struct HashData { pair<K, V> _kv; Status _status = EMPTY; // 给一个缺省值 }; // 当key是一个自定义类型的时候,需要配置一个仿函数,将key转化为整形 template <class K> struct Hash // 为了解决是整数的情况 { size_t operator()(const K& key) // 这里是转化为无符号整数,不管key是什么类型 { return key; // 转成一个能取模的整形值 // 负数能取模吗?可以取模,但是结果可能是负数 } }; struct HashStr // 字符串哈希,我们也要针对整数弄一个 { size_t operator()(const string& s) { // 将字符串所有ASCII码相加,比较大小 // BKDR方法 size_t value = 0; for (auto ch : s) { value *= 31; // 减少冲突 value += ch; } return value; } // 也要防止ht("ate");和ht("eat");的情况,这里是解决不了的 // 因此这里是可能会发生冲突的,是不可避免的 // size_t是有限,而字符串是无限的 }; template<class K, class V, class HashFunc = Hash<K>> // 增加一个仿函数 class HashTable { public: bool Erase(const K& key) { HashData<K, V>* ret = Find(key); if (ret == nullptr) { return false; } else { --_n; ret->_status = DELETE; return true; } } HashData<K, V>* Find(const K& key) { if (_tables.size() == 0) { return nullptr; } HashFunc hf; size_t start = hf(key) % _tables.size(); size_t i = 0; size_t index = start; // 第一次探测就是0的位置 // 线性探测法 while (_tables[index]._status != EMPTY) // 不为空就继续 { if (_tables[index]._kv.first == key && _tables[index]._status == EXIST) { return &_tables[index]; } i++; // index = start + i; // 当前位置已经存在了 index = start + i; // 改为二次探测——就改动这里 index %= _tables.size(); // 越界了以后再从头开始 } return nullptr; } bool Insert(const pair<K, V>& kv) { HashData<K, V>* ret = Find(kv.first); if (ret != nullptr) { return false; } // 进行扩容,乘以10是为了防止 3 / 7 == 0的情况 // 负载因子到0.7就扩容 // 负载因子越小,冲突概率越低,效率越高,空间浪费越高 if (_tables.size() == 0 || _n * 10 / _tables.size() >= 7) // 控制载荷因子 { size_t newSize = _tables.size() == 0 ? 10 : _tables.size() * 2; HashTable<K, V, HashFunc> newHT; newHT._tables.resize(newSize); for (size_t i = 0; i < _tables.size(); ++i) { if (_tables[i]._status == EXIST) { newHT.Insert(_tables[i]._kv); } } _tables.swap(newHT._tables); // this-> ... } HashFunc hf; size_t start = hf(kv.first) % _tables.size(); size_t i = 0; size_t index = start; // 第一次探测就是0的位置 // 线性探测法 while (_tables[index]._status == EXIST) // 存在就继续探测 { // start位置存在数据的情况下是不能添加元素,所以要继续探测 i++; // index = start + i; // 当前位置已经存在了 index = start + i; // 改为二次探测——就改动这里 index %= _tables.size(); // 越界了以后再从头开始 } _tables[index]._kv = kv; _tables[index]._status = EXIST; ++_n; return true; } private: vector<HashData<K, V>> _tables; size_t _n = 0; // 有效数据个数 }; void TestHashTable() { HashTable<int, int, Hash<int>> ht; int a[] = { 2, 12, 22, 32, 42, 52, 62 }; for (auto e : a) { ht.Insert(make_pair(e, e)); } ht.Insert(make_pair(72, 72)); ht.Insert(make_pair(32, 32)); cout << ht.Find(12) << endl; ht.Erase(12); cout << ht.Find(12) << endl; } void TestHashTable2() { /*HashTable - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
闭散列:(开放定址法,在开放的空间中找)问题是,不同位置冲突数据会相互影响,相邻的位置冲突会争抢位置,互相影响效率,所以我们进行了一种优化思路——开散列/拉链法/哈希桶
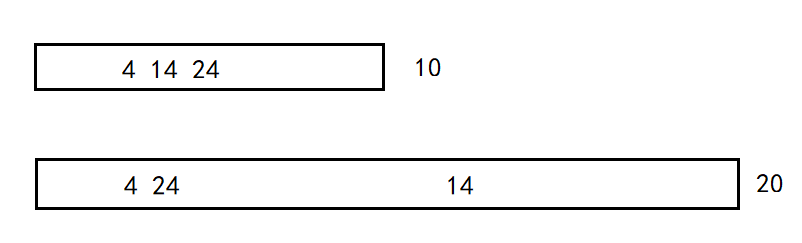
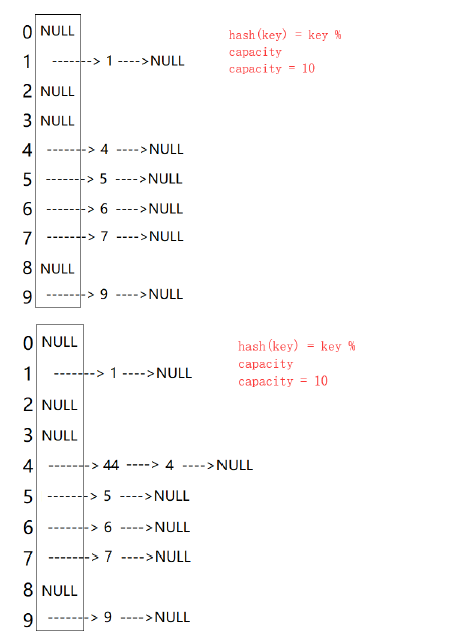
3.2 开散列
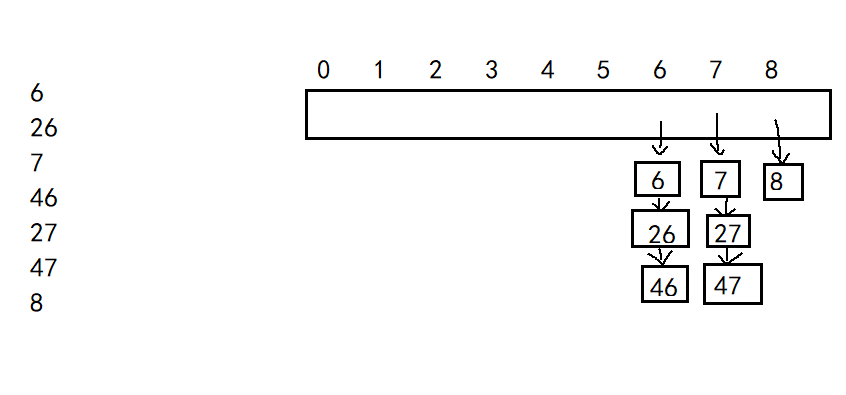
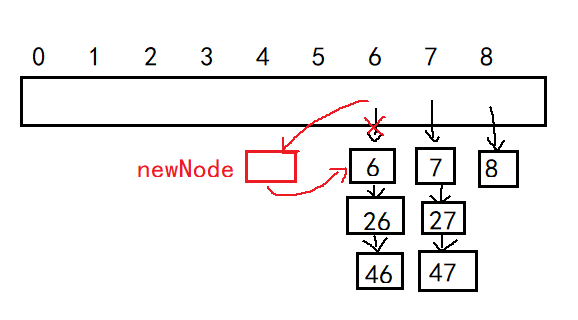
开散列法又叫链地址法(拉链法、哈希桶),首先对关键码集合用散列函数计算散列地址,具有相同地址的关键码归于同一子集合,每一个子集合称为一个桶,各个桶中的元素通过一个单链表链接起来,各链表的头结点存储在哈希表中。
相邻位置冲突,不会争抢位置,不会互相影响
插入元素分析:
极端场景分析:
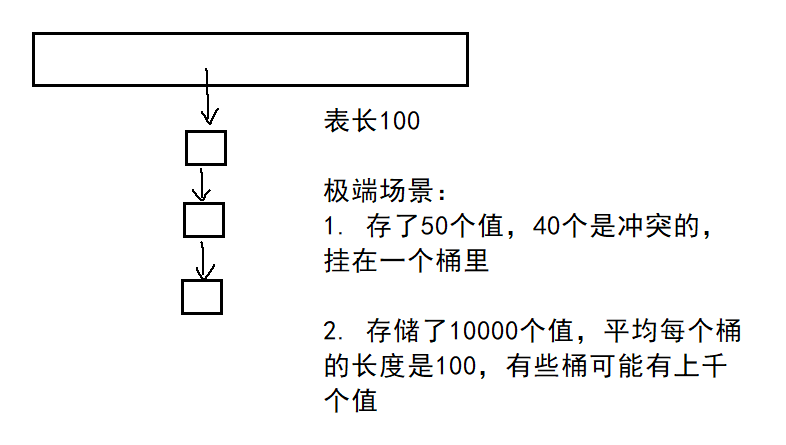
我们采用控制负载因子处理这种问题:负载因子到了就需要扩容,扩容后需要重新映射极端场景防止一个桶位置发生冲突太多,链表太长:当一个桶长度超过一定值以后,转化为红黑树
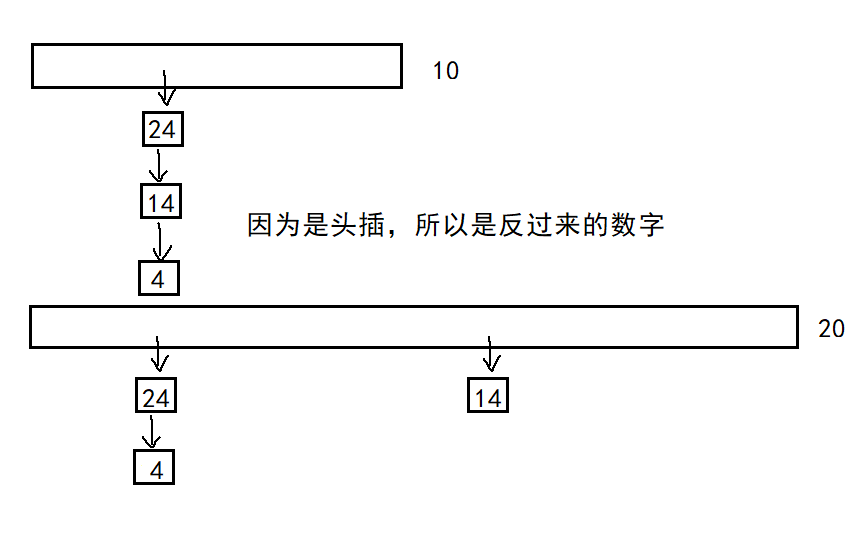
在这里,如果涉及到哈希表的扩容,我们不能像上述那样的方法直接复用insert,因为此时这里是链表,涉及到释放旧空间等等,所以不如直接把链表连接至新表。
代码实现如下:namespace LinkHash { template <class K, class V> struct HashNode { pair<K, V> _kv; HashNode<K, V>* _next; HashNode(const pair<K, V>& kv) :_kv(kv) ,_next(nullptr) {} }; template <class K> struct Hash // 为了解决是整数的情况 { size_t operator()(const K& key) // 这里是转化为无符号整数,不管key是什么类型 { return key; // 转成一个能取模的整形值 // 负数能取模吗?可以取模,但是结果可能是负数 } }; struct HashStr // 字符串哈希,我们也要针对整数弄一个 { size_t operator()(const string& s) { // 将字符串所有ASCII码相加,比较大小 // BKDR方法 size_t value = 0; for (auto ch : s) { value *= 31; // 减少冲突 value += ch; } return value; } }; template <class K, class V, class HashFunc = Hash<K>> class HashTable { typedef HashNode<K, V> Node; public: bool Erase(const K& key) { if (_tables.empty()) { return false; } HashFunc hf; size_t index = hf(key) % _tables.size(); Node* cur = _tables[index]; Node* prev = nullptr; while (cur) { if (cur->_kv.first == key) { // 删除 一种删头一种删其他 if (prev == nullptr) // 头删 { _tables[index] = cur->_next; } else { prev->_next = cur->_next; } --_n; delete cur; return true; } else { prev = cur; cur = cur->_next; } } return false; } Node* Find(const K& key) { if (_tables.empty()) { return nullptr; } HashFunc hf; size_t index = hf(key) % _tables.size(); Node* cur = _tables[index]; while (cur) { if (cur->_kv.first == key) { return cur; } else { cur = cur->_next; } } return nullptr; } bool Insert(const pair<K, V>& kv) { HashFunc hf; Node* ret = Find(kv.first); if (ret) { return false; } if (_n == _tables.size()) // 负载因子 == 1时扩容 { size_t newSize = _tables.size() == 0 ? 10 : 2 * _tables.size(); // 挪动数据 vector<Node*> newTables; newTables.resize(newSize); for (size_t i = 0; i < _tables.size(); ++i) { if (_tables[i]) { Node* cur = _tables[i]; while (cur) { Node* next = cur->_next; size_t index = hf(cur->_kv.first) % newTables.size(); // 头插 cur->_next = newTables[index]; newTables[i] = cur; cur = next; } } _tables[i] = nullptr; } _tables.swap(newTables); } size_t index = hf(kv.first) % _tables.size(); Node* newnode = new Node(kv); // 头插 newnode->_next = _tables[index]; _tables[index] = newnode; ++_n; return true; } private: vector<Node*> _tables; // 指针数组 size_t _n = 0; // 有效数据的个数 }; void TestHashTable() { int a[] = { 4, 24, 14, 7, 37, 27, 57, 67, 34, 14, 54 }; HashTable<int, int> ht; for (auto e : a) { ht.Insert(make_pair(e, e)); } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
-
相关阅读:
ES6 Proxy和Reflect
java--程序流控制
怎么清理c盘的垃圾文件?有什么好的清理方法推荐?
深入协议栈了解TCP的三次握手、四次挥手、CLOSE-WAIT、TIME-WAIT。
CleanMyMac4.11.2清理苹果电脑硬盘、删除垃圾文件软件
Enzo丨Enzo AMPIVIEW HPV 6/11 RNA探针组方案
史上最全大厂面试题复盘总结,全会进大厂拿35K没问题(Java岗)
【CAS:41994-02-9 |Biotinyl tyramide】生物素基酪氨酰胺价格
Opencv立体相机标定
增量与存量,谈投资与市场的规模与人类的未来
- 原文地址:https://blog.csdn.net/weixin_51304981/article/details/126682613
