-
系统篇: uboot 启动流程
bootloader是系统上电后最初加载运行的代码。它提供了处理器上电复位后最开始需要执行的初始化代码。在PC机上引导程序一般由BIOS开始执行,然后读取硬盘中位于MBR(Main Boot Record,主引导记录)中的Bootloader(例如LILO或GRUB),并进一步引导操作系统的启动。然而在嵌入式系统中通常没有像BIOS那样的固件程序,因此整个系统的加载启动就完全由bootloader来完成。它主要的功能是加载与引导内核映像 。
一、u-boot的作用
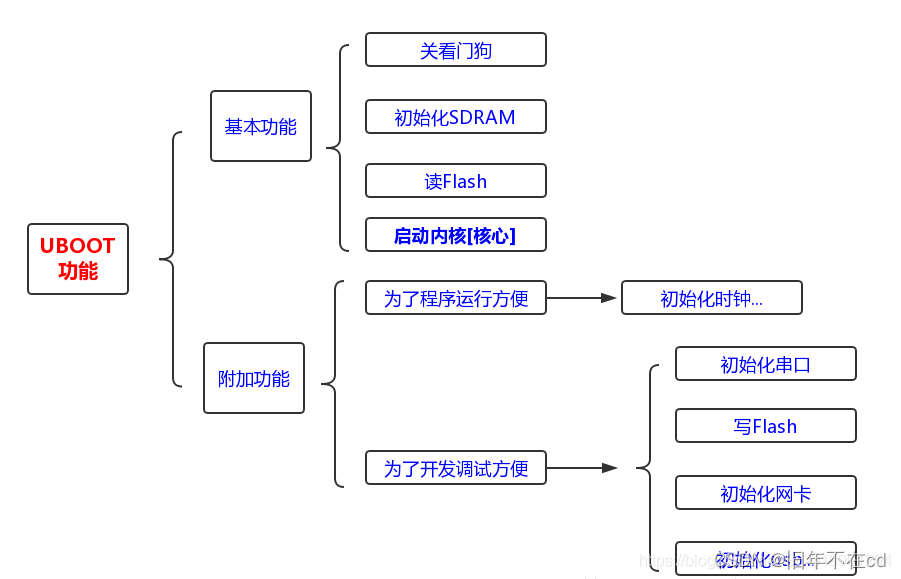
初始化CPU,初始化内存、串口、时钟等硬件资源,加载内核、引导内核,为操作系统的运行提供环境准备
二、u-boot的启动流程
1、第一阶段依赖于cpu体系结构的代码,从存储介质中读取小部分程序到cpu中,这部分程序要完成引导linux所用的硬件的初始化以及加载uboot其余程序到RAM中
- 初始化CPU(中断向量表、时钟、内存等资源)
- 禁止IRQ和FIQ
- 拷贝u-boot第二阶段的代码到内存
- 为第二阶段C程序的运行建立堆栈空间
- 跳转到第二阶段的入口处执行
2、继续初始化必备硬件,加载linux镜像到RAM中,把执行权限交给linux
- 本阶段所需的硬件资源的初始化,为引导linux kernel做准备
- 将内核镜像从flash读取到内存中
- 微内核设置启动参数
- 引导内核
三、源码分析
目录结构:
- board中存放于开发板相关的配置文件,每一个开发板都以子文件夹的形式出现。
- commom文件夹实现u-boot行下支持的命令,每一个命令对应一个文件。
- cpu中存放特定cpu架构相关的目录,每一款cpu架构都对应了一个子目录。
- Drivers中是u-boot支持的各种设备的驱动程序。
- Include文件夹是u-boot使用的头文件,还有各种硬件平台支持的汇编文件,系统配置文件和文件系统支持的文件。
启动流程代码分析:
.globl _start //初始化中断向量表 _start: b reset ldr pc, _undefined_instruction ldr pc, _software_interrupt ldr pc, _prefetch_abort ldr pc, _data_abort ldr pc, _not_used ldr pc, _irq ldr pc, _fiq _undefined_instruction: .word undefined_instruction _software_interrupt: .word software_interrupt _prefetch_abort: .word prefetch_abort _data_abort: .word data_abort _not_used: .word not_used _irq: .word irq _fiq: .word fiq reset: /* * set the cpu to SVC32 mode //切换CPU模式为SVC模式,关闭中断,以便访问更多硬件资源 */ mrs r0, cpsr bic r0, r0, #0x1f orr r0, r0, #0xd3 msr cpsr,r0 /* * disable MMU stuff and caches //关闭MMU与caches */ mrc p15, 0, r0, c1, c0, 0 bic r0, r0, #0x00002000 @ clear bits 13 (--V-) bic r0, r0, #0x00000007 @ clear bits 2:0 (-CAM) orr r0, r0, #0x00000002 @ set bit 1 (--A-) Align orr r0, r0, #0x00000800 @ set bit 11 (Z---) BTB mcr p15, 0, r0, c1, c0, 0 after_ziju: /* init PLL/DDRC/pin mux/... */ //初始化时钟、内存、IO ldr r0, _blank_zone_start ldr r1, _TEXT_BASE sub r0, r0, r1 cmp r3, r2 beq pcie_slave_addr ldr r1, =RAM_START_ADRS ldr sp, =STACK_TRAINING b ziju_ddr_init pcie_slave_addr: ldr r1, =0x0 ldr sp, =PCIE_SLV_STACK ldr r4, =SYS_CTRL_REG_BASE str r2, [r4, #HI3531D_SYSBOOT10] ziju_ddr_init: add r0, r0, r1 mov r1, #0x0 /* flags: 0->normal 1->pm */ bl init_registers /* init PLL/DDRC/... */ copy_loop: @ copy 32 bytes at a time //循环拷贝u-boot到内存 ldmia r0!, { r3 - r10} @ copy from source address [r0] stmia r1!, { r3 - r10} @ copy to target address [r1] cmp r0, r2 @ until source end addreee [r2] ble copy_loop /* Set up the stack */ //设置堆栈 stack_setup: ldr r0, _TEXT_BASE @ upper 128 KiB: relocated uboot sub r0, r0, #CONFIG_SYS_MALLOC_LEN @ malloc area sub r0, r0, #CONFIG_SYS_GBL_DATA_SIZE @ bdinfo #ifdef CONFIG_USE_IRQ sub r0, r0, #(CONFIG_STACKSIZE_IRQ + CONFIG_STACKSIZE_FIQ) #endif sub sp, r0, #12 @ leave 3 words for abort-stack and sp, sp, #~7 @ 8 byte alinged for (ldr/str)d ldr pc, _start_armboot @ jump to C code //跳转到start_armboot函数执行 _start_armboot: .word start_armboot- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
void start_armboot (void) /* Pointer is writable since we allocated a register for it */ gd = (gd_t*)(_armboot_start - CONFIG_SYS_MALLOC_LEN - sizeof(gd_t))- 1
- 2
-
相关阅读:
如理解WPF绑定中的UpdateSourceTrigger
Centos7安装mysql
基于xml的AOP开发
[自动化测试]树莓派4B安装pyppeteer
python面向对象的一个简单实例
记一次HEAP CORRUPTION DETECTED问题及解决
【Vue】在vue中命名的时候会遇到 component name “index“ should always be multi-word的解决方案
处理死锁策略2
现代循环神经网络 - 序列到序列学习
C++模板
- 原文地址:https://blog.csdn.net/GCQ19961204/article/details/126679837
