-
TinyRenderer学习笔记--Lesson 5
Lesson 5 移动相机
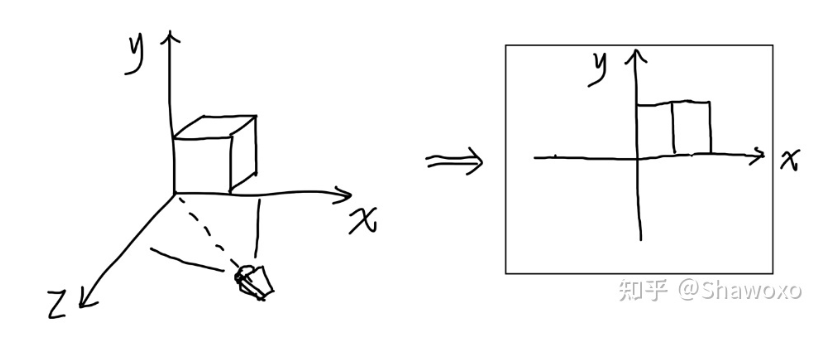
和第四节相似,这一节也会用到一些矩阵向量的计算,可以想象一下,我们在围绕一个物体进行环绕观察,物体在
世界坐标系中的位置是不会变化的,变化的是相机的位置。此时要正确的把图形渲染出来,需要重新计算物体和相
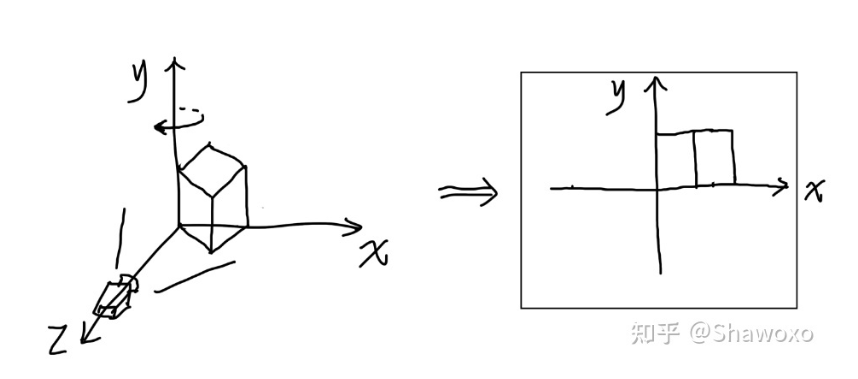
机之间的距离,重新进行投影计算,比较麻烦。所以相对的,我们把物体进行反操作,也能达到相同的效果。比如
相机围绕物体的y轴旋转,和物体绕着y轴反方向旋转,最后渲染出来的图形是一样的。
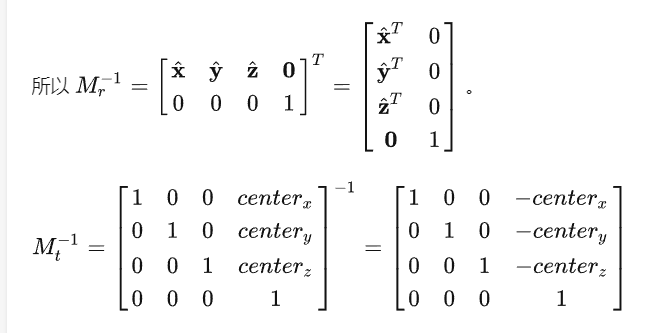
逆变换就对应着逆矩阵。
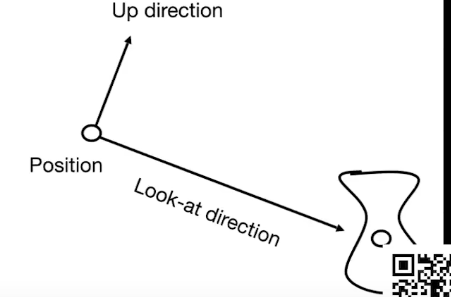
准备工作,在摄像机坐标系下,我们要引入up向量,它始终指向摄像机的上方,注意,这里的up是摄像机坐标系下的up。即下图中的Up direction向量。
下面,需要把摄像机进行旋转,让摄像机的上方向指向世界坐标系的Y方向,摄像机的目标方向 (direction) 指向世界坐标系的 -Z 方向。
-direction方向比较好求,直接用摄像机的坐标(x,y,z) - (0,0,0)就能得到,这个就是新的坐标
系的Z轴。前面我们定义了up向量,up × Z = X,这样就得到了X轴,继而X × Z = Y,这样就得到了新的X,Y,Z轴。
矩阵表示为
这个就是把摄像机旋转到 ”摄像机的上方向指向世界坐标系的Y方向,摄像机的目标方向 (direction) 指向世界坐
**标系的 -Z 方向“**状态的矩阵。此时,摄像机依然看向物体,不过物体仍然在center位置,不在原点。
然后下一步,我们需要把看向的位置移动到世界坐标系的原点,看向的位置可以理解成物体的位置,因为我们最终
得到的场景是摄像机位于Z轴负方向的位置,看向原点,所以要把看向的位置移到原点,看向的位置我们定义成
center点。这个操作使用平移矩阵表示为
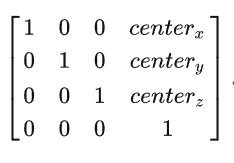
这就是摄像机的操作,先旋转,再平移,就能达到我们理想的状态。但是前面说过,我们要求得是摄像机不动,物体动,那就要求这两个矩阵的逆
现在,把这两个矩阵应用到物体上,就达到了摄像机移动的视觉效果。
这里和普通的属兔变换要注意区别,普通的视图变换是作用在摄像机上的,这里是作用在物体上的。games101里
面的视图变换是把摄像机移动到原点并看向-Z轴方向,这里是把物体移动到原点,摄像机在Z轴方向看向原点,之
后我会改代码,改成games101的那种,这个实在是不好理解,看了好半天!!!
Matrix lookat(Vec3f eye, Vec3f center, Vec3f up) { Vec3f z = (eye - center).normalize(); Vec3f x = (up ^ z).normalize(); Vec3f y = (z ^ x).normalize(); Matrix res = Matrix::identity(4); for (int i = 0; i < 3; i++) { //旋转子矩阵 res[0][i] = x[i]; res[1][i] = y[i]; res[2][i] = z[i]; //平移子矩阵 res[i][3] = -center[i]; } return res; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
效果图:

这里图片更加平滑了,因为加入了高洛德着色法,原来我们使用的是平面着色,就是整个三角形平面使用一个方向
的法线,计算得到的光强是一样的,这样得到的效果就是整个三角形都是一种颜色,导致渲染出来的图片有明显的
条痕。高洛德着色是将三角形三个顶点的法向量都算出来,然后进行插值,这样三角形内部的颜色就是渐变的。
这里插值使用的线性插值,所以三角形的栅格化就是用的扫线法。
void triangle(Vec3i t0, Vec3i t1, Vec3i t2, float ity0, float ity1, float ity2, Vec2i uv0, Vec2i uv1, Vec2i uv2, float dis0, float dis1, float dis2, TGAImage& image, int* zbuffer) { //按照y分割为两个三角形 if (t0.y == t1.y && t0.y == t2.y) return; if (t0.y > t1.y) { std::swap(t0, t1); std::swap(ity0, ity1); std::swap(uv0, uv1); } if (t0.y > t2.y) { std::swap(t0, t2); std::swap(ity0, ity2); std::swap(uv0, uv2); } if (t1.y > t2.y) { std::swap(t1, t2); std::swap(ity1, ity2); std::swap(uv1, uv2); } int total_height = t2.y - t0.y; for (int i = 0; i < total_height; i++) { bool second_half = i > t1.y - t0.y || t1.y == t0.y; int segment_height = second_half ? t2.y - t1.y : t1.y - t0.y; float alpha = (float)i / total_height; float beta = (float)(i - (second_half ? t1.y - t0.y : 0)) / segment_height; //计算A,B两点的坐标 Vec3i A = t0 + Vec3f(t2 - t0) * alpha; Vec3i B = second_half ? t1 + Vec3f(t2 - t1) * beta : t0 + Vec3f(t1 - t0) * beta; //计算A,B两点的光照强度 float ityA = ity0 + (ity2 - ity0) * alpha; float ityB = second_half ? ity1 + (ity2 - ity1) * beta : ity0 + (ity1 - ity0) * beta; //计算UV Vec2i uvA = uv0 + (uv2 - uv0) * alpha; Vec2i uvB = second_half ? uv1 + (uv2 - uv1) * beta : uv0 + (uv1 - uv0) * beta; //计算距离 float disA = dis0 + (dis2 - dis0) * alpha; float disB = second_half ? dis1 + (dis2 - dis1) * beta : dis0 + (dis1 - dis0) * beta; if (A.x > B.x) { std::swap(A, B); std::swap(ityA, ityB); } //x坐标作为循环控制 for (int j = A.x; j <= B.x; j++) { float phi = B.x == A.x ? 1. : (float)(j - A.x) / (B.x - A.x); //计算当前需要绘制点P的坐标,光照强度 Vec3i P = Vec3f(A) + Vec3f(B - A) * phi; float ityP = ityA + (ityB - ityA) * phi; ityP = std::min(1.f, std::abs(ityP) + 0.01f); Vec2i uvP = uvA + (uvB - uvA) * phi; float disP = disA + (disB - disA) * phi; int idx = P.x + P.y * width; //边界限制 if (P.x >= width || P.y >= height || P.x < 0 || P.y < 0) continue; if (zbuffer[idx] < P.z) { zbuffer[idx] = P.z; TGAColor color = model->diffuse(uvP); image.set(P.x, P.y, TGAColor(color.bgra[2], color.bgra[1], color.bgra[0]) * ityP * (20.f / std::pow(disP, 2.f))); } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
-
相关阅读:
探索Java中的正则表达式:从基础到高级应用
Linux之文件打包和解压缩
1546_AURIX_TC275_CPU子系统_指令耗时以及程序存储接口
关于程序员的真相,你知道几个?
使用EFCore连接SQLite
kafka生产者你不得不知的那些事儿
Nginx Rewrite
【大数据】HDFS的使用与集群角色(学习笔记)
实战纪实 | 某米企业src未授权访问
【数据挖掘 | 关联性分析】万字长文详解关联性分析,详解Apriori算法为例,确定不来看看?
- 原文地址:https://blog.csdn.net/qq_51599283/article/details/126640050
