-
基于 FPGA 实现 IIC(I2C) 协议控制 EEPROM 读写操作
本文内容:FPGA 作为主机,控制 EEPROM 芯片,进行数据读写,同时将写入或读出的数据和地址显示在数码管上,并有标记
- 前一篇文章:基于 FPGA 使用 Verilog 实现 IIC(I2C) 协议回环数据传输 的 FPGA 作为从机,PC 作为主机,所以 FPGA 是以从机的形式写的源码
- 本篇文章,是以 FPGA 作为主机,控制 EEPROM 芯片数据读写,区别也不是很大,协议也完全相同,原理就不介绍了,直接上源代码
一、源码
1.1 顶层模块
IIC_top.v
/*========================================*\ filename : IIC_top.v description : IIC顶层模块 up file : reversion : v1.0 : 2022-8-22 16:15:32 author : 张某某 \*========================================*/ module IIC_top ( input clk , input rst_n , input [ 1:0] key_in , inout SDA , output SCL , output [ 5:0] SEL , output [ 7:0] DIG ); // Parameter definition wire [ 1:0] press ; wire SDA_in ; wire SDA_out ; wire SDA_oe ; wire [ 7:0] data ; wire [ 7:0] address ; wire [ 1:0] eeprom_state ; // Signal definition // Module calls key_filter U_key_filter( /*input */ .clk (clk ), /*input */ .rst_n (rst_n ), /*input [ 1:0]*/ .key_in (key_in ), /*output reg [ 1:0]*/ .press (press ) ); iic_eeprom U_iic_eeprom( /*input */ .clk (clk ), /*input */ .rst_n (rst_n ), /*input [ 1:0]*/ .press (press ), /*input */ .SDA_in (SDA_in ), /*output reg */ .SCL (SCL ), /*output reg */ .SDA_out (SDA_out ), /*output reg */ .SDA_oe (SDA_oe ), /*output reg [ 7:0]*/ .data_out (data ), /*output reg [ 7:0]*/ .address_out (address ), /*output reg [ 1:0]*/ .state_out (eeprom_state ) // 0表示空闲,1表示写,2表示读 ); display U_display( /*input */ .clk (clk ), // 50MHz /*input */ .rst_n (rst_n ), // 复位信号 /*input [ 1:0]*/ .eeprom_state (eeprom_state ), /*input [ 7:0]*/ .data (data ), /*input [ 7:0]*/ .address (address ), /*output reg [ 5:0]*/ .SEL (SEL ), // SEL信号 /*output reg [ 7:0]*/ .DIG (DIG ) // DIG信号 ); // Logic description assign SDA_in = SDA; assign SDA = SDA_oe ? SDA_out : 1'bz; endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
1.2 按键模块
key_filter.v
/*========================================*\ filename : key_filter.v description : 按键消抖模块 up file : IIC_top.v reversion : v1.0 : 2022-8-22 16:15:09 author : 张某某 \*========================================*/ module key_filter #(parameter MS_20 = 20'd1000_000)( input clk , input rst_n , input [ 1:0] key_in , output reg [ 1:0] press ); // 全局变量定义 // 信号定义 reg [ 1:0] key_0 ; // 按键信号当前时钟周期电平 reg [ 1:0] key_1 ; // 按键信号下一个时钟周期电平 wire [ 1:0] key_nedge ; // 下降沿使能信号 reg add_flag ; // 计数使能信号 reg [19:0] delay_cnt ; // 延时计数器 // 模块功能 //打拍器 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin key_0 <= 'b1; key_1 <= 'b1; end else begin key_0 <= key_in; key_1 <= key_0; end end // 检测下降沿 assign key_nedge = ~key_0 & key_1; // 计数使能信号 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin add_flag <= 'b0; end else if (key_nedge) begin add_flag <= 'b1; end else if (delay_cnt >= MS_20 - 1) begin add_flag <= 'b0; end else begin add_flag <= add_flag; end end // 计数20ms always @(posedge clk or negedge rst_n) begin if (!rst_n) begin delay_cnt <= 20'd0; end else if (add_flag) begin if (delay_cnt >= MS_20 - 1) begin delay_cnt <= 20'd0; end else begin delay_cnt <= delay_cnt + 1; end end else begin delay_cnt <= 20'd0; end end // 输出 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin press <= 'd0; end else if (delay_cnt >= MS_20 - 1) begin press <= ~key_in; end else begin press <= 'd0; end end endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
1.3 IIC模块
iic_eeprom.v
/*========================================*\ filename : iic_eeprom.v description : IIC控制EEPROM up file : IIC_top.v reversion : v1.0 : 2022-8-22 16:14:06 author : 张某某 \*========================================*/ module iic_eeprom ( input clk , input rst_n , input [ 1:0] press , input SDA_in , output reg SCL , output reg SDA_out , output reg SDA_oe , output reg [ 7:0] data_out , output reg [ 7:0] address_out , output reg [ 1:0] state_out // 0表示空闲,1表示写,2表示读 ); // Parameter definition parameter IDLE = 7'b000_0001 , START = 7'b000_0010 , WR_DATA = 7'b000_0100 , RD_DATA = 7'b000_1000 , CHECK_ACK = 7'b001_0000 , SEND_NACK = 7'b010_0000 , STOP = 7'b100_0000 ; // Signal definition reg [ 6:0] state_c ; reg [ 6:0] state_n ; wire idle2start ; wire start2wr_data ; wire wr_data2check_ack ; wire check_ack2start ; wire check_ack2wr_data ; wire check_ack2rd_data ; wire rd_data2send_nack ; wire check_ack2stop ; wire send_nack2stop ; wire stop2idle ; reg [ 6:0] cnt_400KHz ; // SCL频率计数器 wire add_cnt_400KHz ; wire end_cnt_400KHz ; reg SCL_0 ; // SCL打拍器 wire SCL_podge ; // SCL上升沿 wire SCL_nedge ; // SCL下降沿 reg [ 2:0] cnt_bit ; // 比特计数器 wire add_cnt_bit ; wire end_cnt_bit ; reg [ 1:0] cnt_byte ; // 字节计数器 wire add_cnt_byte ; wire end_cnt_byte ; reg [ 1:0] eeprom_state ; // 0表示空闲,1表示写,2表示读 reg [ 7:0] data_buffer ; // 数据缓冲器 reg [ 7:0] pointer_wr ; // 写数据指针 reg [ 7:0] pointer_rd ; // 读数据指针 reg [ 7:0] data_generate ; // 生成写入EEPROM的数据 wire add_data_generate ; wire end_data_generate ; // Logic description /************************************* 第一段 状态转移 *************************************/ always @(posedge clk or negedge rst_n) begin if (!rst_n) begin state_c <= IDLE; end else begin state_c <= state_n; end end /************************************* 第二段 状态转移规律 *************************************/ always @(*) begin case (state_c) IDLE : begin if (idle2start) begin state_n = START; end else begin state_n = state_c; end end START : begin if (start2wr_data) begin state_n = WR_DATA; end else begin state_n = state_c; end end WR_DATA : begin if (wr_data2check_ack) begin state_n = CHECK_ACK; end else begin state_n = state_c; end end RD_DATA : begin if (rd_data2send_nack) begin state_n = SEND_NACK; end else begin state_n = state_c; end end CHECK_ACK : begin if (check_ack2start) begin state_n = START; end else if (check_ack2rd_data) begin state_n = RD_DATA; end else if (check_ack2wr_data) begin state_n = WR_DATA; end else if (check_ack2stop) begin state_n = STOP; end else begin state_n = state_c; end end SEND_NACK : begin if (send_nack2stop) begin state_n = STOP; end else begin state_n = state_c; end end STOP : begin if (stop2idle) begin state_n = IDLE; end else begin state_n = state_c; end end endcase end assign idle2start = state_c == IDLE && press; assign start2wr_data = state_c == START && SCL_nedge; assign wr_data2check_ack = state_c == WR_DATA && end_cnt_bit && cnt_byte <= 'd3; assign check_ack2start = state_c == CHECK_ACK && cnt_byte == 'd1 && SCL_nedge && eeprom_state == 'd2; assign check_ack2wr_data = state_c == CHECK_ACK && SCL_nedge && cnt_byte < 'd2; assign check_ack2rd_data = state_c == CHECK_ACK && cnt_byte == 'd2 && SCL_nedge && eeprom_state == 'd2; assign rd_data2send_nack = state_c == RD_DATA && end_cnt_bit && cnt_byte <= 'd3; assign check_ack2stop = state_c == CHECK_ACK && cnt_byte == 'd2 && SCL_nedge && eeprom_state == 'd1; assign send_nack2stop = state_c == SEND_NACK && cnt_byte == 'd3 && SCL_nedge; assign stop2idle = state_c == STOP && cnt_400KHz == 'd57; /************************************* 第三段 描述输出 *************************************/ // 按键控制EEPROM读写 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin eeprom_state <= 'd0; end else if (stop2idle) begin eeprom_state <= 'd0; end else if (state_c == IDLE) begin case (press) 2'b10 : eeprom_state <= 'd1; // 写状态 2'b01 : eeprom_state <= 'd2; // 读状态 default: eeprom_state <= eeprom_state; endcase end else begin eeprom_state <= eeprom_state; end end // 按键控制指针 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin pointer_wr <= 'd0; pointer_rd <= 'd0; end else if (stop2idle) begin case (eeprom_state) 'd1 : pointer_wr <= pointer_wr + 'd1; 'd2 : pointer_rd <= pointer_rd + 'd1; default: begin pointer_wr <= pointer_wr; pointer_rd <= pointer_rd;end endcase end else begin pointer_wr <= pointer_wr; pointer_rd <= pointer_rd; end end // SCL打拍器 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin SCL_0 <= 'd1; end else begin SCL_0 <= SCL; end end assign SCL_podge = SCL & ~SCL_0; // SCL上升沿 assign SCL_nedge = ~SCL & SCL_0; // SCL下降沿 // SCL计数器 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin cnt_400KHz <= 'd0; end else if (add_cnt_400KHz) begin if (end_cnt_400KHz) begin cnt_400KHz <= 'd0; end else begin cnt_400KHz <= cnt_400KHz + 'd1; end end else begin cnt_400KHz <= 'd0; end end assign add_cnt_400KHz = state_c != IDLE; assign end_cnt_400KHz = add_cnt_400KHz && cnt_400KHz >= 'd124; // SCL输出 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin SCL <= 'd1; end else begin case (cnt_400KHz) 'd0 : SCL <= 'd1; 'd59 : SCL <= 'd0; default: SCL <= SCL; endcase end end // 比特计数器 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin cnt_bit <= 'd0; end else if (add_cnt_bit) begin if (end_cnt_bit) begin cnt_bit <= 'd0; end else begin cnt_bit <= cnt_bit + 'd1; end end else begin cnt_bit <= cnt_bit; end end assign add_cnt_bit = (state_c == WR_DATA || state_c == RD_DATA) && SCL_nedge; assign end_cnt_bit = add_cnt_bit && cnt_bit >= 'd7; // 字节计数器 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin cnt_byte <= 'd0; end else if (check_ack2stop || send_nack2stop) begin cnt_byte <= 'd0; end else if (add_cnt_byte) begin if (end_cnt_byte) begin cnt_byte <= 'd0; end else begin cnt_byte <= cnt_byte + 'd1; end end else begin cnt_byte <= cnt_byte; end end assign add_cnt_byte = check_ack2wr_data || check_ack2rd_data; assign end_cnt_byte = add_cnt_byte && cnt_byte >= 'd3; // 生成顺序数据 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin data_generate <= 'd0; end else if (add_data_generate) begin if (end_data_generate) begin data_generate <= 'd1; end else begin data_generate <= data_generate + 'd1; end end else begin data_generate <= data_generate; end end assign add_data_generate = state_c == IDLE && press == 2'b10; assign end_data_generate = add_data_generate && data_generate >= 8'hff; // 数据缓冲器 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin data_buffer <= 'd0; end else if (state_c == WR_DATA || state_c == RD_DATA) begin case (eeprom_state) 'd1 : // 1表示写数据到EEPROM中 begin case (cnt_byte) 'd0 : data_buffer <= 8'ha0; 'd1 : data_buffer <= pointer_wr; 'd2 : data_buffer <= data_generate; default: data_buffer <= 'd0; endcase end 'd2 : // 2表示从EEPROM中读数据 begin case (cnt_byte) 'd0 : data_buffer <= 8'ha0; 'd1 : data_buffer <= pointer_rd; 'd2 : data_buffer <= 8'ha1; 'd3 : begin if (SCL) begin data_buffer[7 - cnt_bit] <= SDA_in; end else begin data_buffer <= data_buffer; end end default: data_buffer <= 'd0; endcase end default: data_buffer <= 'd0; endcase end else begin data_buffer <= 'd0; end end // SDA_out输出 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin SDA_oe <= 'd1; SDA_out <= 'd1; end else begin case (state_c) START : begin if (cnt_400KHz == 'd29) begin SDA_oe <= 'd1; SDA_out <= 'd0; end else if (cnt_400KHz == 'd69) begin SDA_oe <= 'd1; SDA_out <= 'd1; end else begin SDA_oe <= SDA_oe; SDA_out <= SDA_out; end end WR_DATA : begin if (cnt_400KHz == 'd69) begin SDA_oe <= 'd1; SDA_out <= data_buffer[7 - cnt_bit]; end else begin SDA_oe <= SDA_oe; SDA_out <= SDA_out; end end RD_DATA : begin SDA_oe <= 'd0; SDA_out <= 'd0; end CHECK_ACK : begin if (cnt_400KHz == 'd69) begin SDA_oe <= 'd0; SDA_out <= 'd0; end else begin SDA_oe <= SDA_oe; SDA_out <= SDA_out; end end SEND_NACK : begin if (cnt_400KHz == 'd69) begin SDA_oe <= 'd1; SDA_out <= 'd1; end else begin SDA_oe <= SDA_oe; SDA_out <= SDA_out; end end STOP : begin if (cnt_400KHz == 'd69) begin SDA_oe <= 'd1; SDA_out <= 'd0; end else if (cnt_400KHz == 'd29) begin SDA_oe <= 'd1; SDA_out <= 'd1; end else begin SDA_oe <= SDA_oe; SDA_out <= SDA_out; end end default: begin SDA_oe <= 'd1; SDA_out <= 'd1; end endcase end end // 输出数据给数码管显示 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin data_out <= 'd0; address_out <= 'd0; state_out <= 'd0; end else if (eeprom_state == 'd1 && wr_data2check_ack && cnt_byte == 'd2) begin data_out <= data_buffer; address_out <= pointer_wr; state_out <= 'd1; end else if (rd_data2send_nack) begin data_out <= data_buffer; address_out <= pointer_rd; state_out <= 'd2; end else begin data_out <= data_out; address_out <= address_out; state_out <= state_out; end end endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
- 450
- 451
- 452
- 453
- 454
- 455
- 456
- 457
- 458
- 459
- 460
- 461
- 462
- 463
- 464
- 465
- 466
- 467
- 468
- 469
- 470
- 471
- 472
- 473
- 474
- 475
- 476
- 477
- 478
- 479
- 480
1.4 数码管模块
display.v
/*========================================*\ filename : display.v description : 滚动显示输入的数据 up file : reversion : v1.0 : 2022-7-27 18:49:34 author : 张某某 \*========================================*/ module display #(parameter MS_1= 16'd50000)( input clk , // 50MHz input rst_n , // 复位信号 input [ 1:0] eeprom_state , input [ 7:0] data , input [ 7:0] address , output reg [ 5:0] SEL , // SEL信号 output reg [ 7:0] DIG // DIG信号 ); // 信号定义 reg [15:0] cnt_flicker ; // 计数1ms wire SEL_change ; // cnt_flicker计满使能信号 reg [ 4:0] tmp_data ; // 当前DIG的值 wire [ 3:0] num_2 ; // 百位 wire [ 3:0] num_1 ; // 十位 wire [ 3:0] num_0 ; // 个位 reg pointer ; // 逻辑描述 // 闪烁频率计数器 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin cnt_flicker <= 'd0; end else if (SEL_change) begin cnt_flicker <= 'd0; end else begin cnt_flicker <= cnt_flicker + 'd1; end end assign SEL_change = cnt_flicker >= MS_1 - 'd1 ? 1'b1 : 1'b0; // SEL信号输出 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin SEL <= 6'b011_111; end else if (SEL_change) begin SEL <= {SEL[4:0], SEL[5]}; end else begin SEL <= SEL; end end // 获取地址的百位、十位、个位 assign num_2 = address / 100; assign num_1 = address % 100 / 10; assign num_0 = address % 100 % 10; // tmp_data当前SEL位选所对应的DIG十进制值 always @(*) begin case (SEL) 6'b011_111 : begin tmp_data = data[3:0]; pointer = 'd1;end 6'b101_111 : begin tmp_data = data[7:4]; pointer = 'd1;end 6'b110_111 : begin tmp_data = num_0; pointer = 'd0;end 6'b111_011 : begin pointer = 'd1; if (num_2 == 'd0 && num_1 == 'd0) begin tmp_data = 'd16; end else begin tmp_data = num_1; end end 6'b111_101 : begin pointer = 'd1; if (num_2) begin tmp_data = num_2; end else begin tmp_data = 'd16; end end 6'b111_110 : begin pointer = 'd1; case (eeprom_state) 'd1 : tmp_data = 'd17; 'd2 : tmp_data = 'd18; default: tmp_data = 'd16; endcase end default: begin tmp_data = 'd0; pointer = 'd1;end endcase end // DIG输出各数字对应的二进制 always @(*) begin case (tmp_data) 5'd0 : DIG = {pointer, 7'b100_0000}; 5'd1 : DIG = {pointer, 7'b111_1001}; 5'd2 : DIG = {pointer, 7'b010_0100}; 5'd3 : DIG = {pointer, 7'b011_0000}; 5'd4 : DIG = {pointer, 7'b001_1001}; 5'd5 : DIG = {pointer, 7'b001_0010}; 5'd6 : DIG = {pointer, 7'b000_0010}; 5'd7 : DIG = {pointer, 7'b111_1000}; 5'd8 : DIG = {pointer, 7'b000_0000}; 5'd9 : DIG = {pointer, 7'b001_0000}; 5'd10: DIG = {pointer, 7'b000_1000}; 5'd11: DIG = {pointer, 7'b000_0011}; 5'd12: DIG = {pointer, 7'b100_0110}; 5'd13: DIG = {pointer, 7'b010_0001}; 5'd14: DIG = {pointer, 7'b000_0110}; 5'd15: DIG = {pointer, 7'b000_1110}; 5'd16: DIG = {pointer, 7'b111_1111}; // 全黑 5'd17: DIG = {pointer, 7'b001_1101}; // 写数据标识符 5'd18: DIG = {pointer, 7'b010_1011}; // 读数据标识符 default : DIG = 8'b1111_1111; endcase end endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
二、仿真文件
这里只需要对 iic_eeprom.v 文件进行仿真即可
tb_iic_eeprom.v/*========================================*\ filename : tb_iic_eeprom.v description : iic_eeprom仿真 up file : reversion : v1.0 : 2022-8-22 16:13:37 author : 张某某 \*========================================*/ `timescale 1ns/1ns module tb_iic_eeprom; // Parameter definition parameter CYC_CLK = 20 ; // Drive signal reg tb_clk ; reg tb_rst_n ; reg [ 1:0] tb_press ; reg tb_SDA_in ; // Observation signal wire tb_SCL ; wire tb_SDA_out ; wire tb_SDA_oe ; wire [ 7:0] tb_data_out ; // Module calls iic_eeprom U_iic_eeprom( /*input */ .clk (tb_clk ), /*input */ .rst_n (tb_rst_n ), /*input [ 1:0]*/ .press (tb_press ), /*input */ .SDA_in (tb_SDA_in ), /*output reg */ .SCL (tb_SCL ), /*output reg */ .SDA_out (tb_SDA_out ), /*output reg */ .SDA_oe (tb_SDA_oe ), /*output reg [ 7:0]*/ .data_out (tb_data_out ), /*output reg [ 7:0]*/ .address_out (tb_address_out ), /*output reg [ 7:0]*/ .state_out (tb_state_out ) ); // System initialization initial begin tb_clk = 1'b1; tb_rst_n = 1'b0; #(CYC_CLK) tb_rst_n = 1'b1; end always #(CYC_CLK >> 1) tb_clk = ~tb_clk; initial begin tb_press = 2'b00; tb_SDA_in = 1'b0; #(1000 * CYC_CLK); // 写数据 tb_press = 2'b10; #(CYC_CLK) tb_press = 2'b00; #(5000 * CYC_CLK); // 读数据 tb_press = 2'b01; #(CYC_CLK) tb_press = 2'b00; #(10000 * CYC_CLK); $stop; end endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
三、管脚配置文件
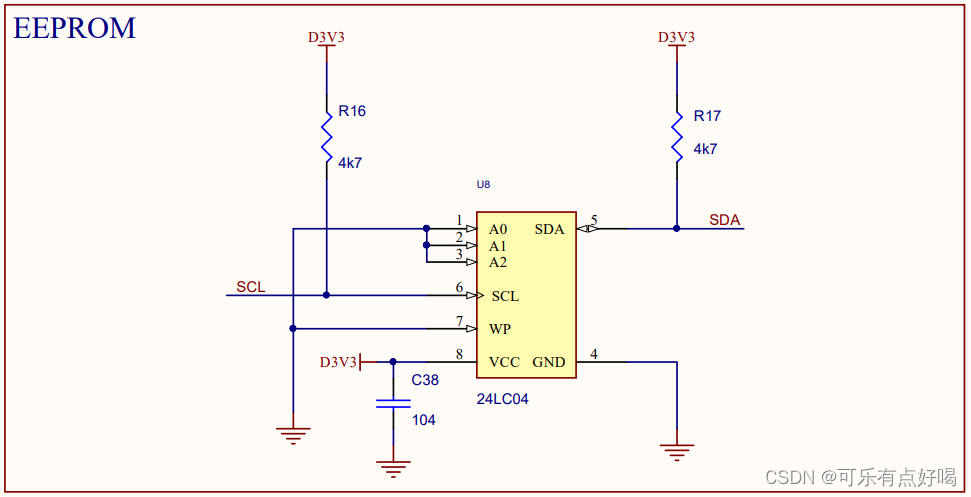
- 根据开发板原理图可以知道,EEPROM 采用 24LC04 芯片,再在原理图中找到对应管脚即可
tcl 文件
set_location_assignment PIN_E1 -to clk set_location_assignment PIN_E15 -to rst_n set_location_assignment PIN_E16 -to key_in[0] set_location_assignment PIN_M15 -to key_in[1] set_location_assignment PIN_L1 -to SCL set_location_assignment PIN_L2 -to SDA set_location_assignment PIN_A4 -to SEL[0] set_location_assignment PIN_B4 -to SEL[1] set_location_assignment PIN_A3 -to SEL[2] set_location_assignment PIN_B3 -to SEL[3] set_location_assignment PIN_A2 -to SEL[4] set_location_assignment PIN_B1 -to SEL[5] set_location_assignment PIN_B7 -to DIG[0] set_location_assignment PIN_A8 -to DIG[1] set_location_assignment PIN_A6 -to DIG[2] set_location_assignment PIN_B5 -to DIG[3] set_location_assignment PIN_B6 -to DIG[4] set_location_assignment PIN_A7 -to DIG[5] set_location_assignment PIN_B8 -to DIG[6] set_location_assignment PIN_A5 -to DIG[7]- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
四、验证结果
- 仿真结果,前面一部分是写的波形,后面一部分是读的波形

- 板上结果
IIC控制EEPROM
- 按左边的按键表示写操作,按右边按键表示读操作
- 最左边的符号,“u” 表示写数据到 EEPROM 中,“n” 表示从 EEPROM 中读出写入的数据
- 小数点左边的数字表示当前操作的 EEPROM 地址
- 小数点右边的数字表示写入或读出的数据
-
相关阅读:
众和策略:美国芯片出口管制升级,万亿AI巨头回应!一度跌超7%
TensorFlow2.0教程1-Eager
Linux64Bit下安装MySQL5.6-不能修改root密码
kibana报错内存溢出问题解决
Git & GitHub 入门篇
什么是AIGC
【MATLAB源码-第66期】基于麻雀搜索算法(SSA)的栅格路径规划,输出做短路径图和适应度曲线。
8.Haproxy 搭建Web集群
Python基础入门例程1-NP1 Hello World!
Flask框架-1-[群聊]: flask-socketio实现websocket的功能
- 原文地址:https://blog.csdn.net/ssj925319/article/details/126479261
