-
MQ-2烟雾浓度传感器( 含源码 )
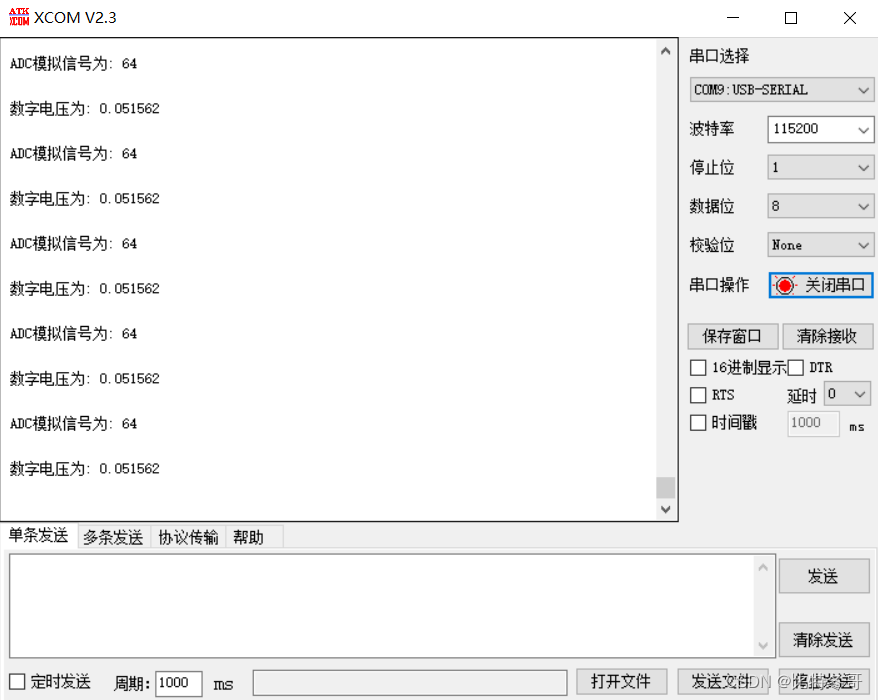
本实验将采集到的传感器数据利用ADC转换,将转换后的电压值显示在串口调试助手上
一、模块简介
MQ-2烟雾传感器所使用的气敏材料是在清洁空气中电导率较低的二氧化锡(SnO2)。当烟雾传感器所处环境中存在可燃气体时,烟雾传感器的电导率随空气中可燃气体浓度的增加而增大。使用简单的电路即可将电导率的变化转换为与该烟雾传感器气体浓度相对应的输出信号。

MQ-2气体烟雾传感器对液化气、丙烷、氢气的灵敏度高,对天然气和其它可燃蒸汽的检测也很理想。这种气体传感器可检测多种可燃性气体,是一款适合多种应用的低成本烟雾传感器。
1. 模块特性:
MQ-2烟雾传感器在较宽的浓度范围内对可燃气体有良好的灵敏度
对液化气、丙烷、氢气 的灵敏度较高
长寿命、低成本
简单的驱动电路即可2. 主要应用:
家庭用气体泄漏报警器
工业用可燃烟雾气体报警器
便携式烟雾气体检测器3. 产品参数:
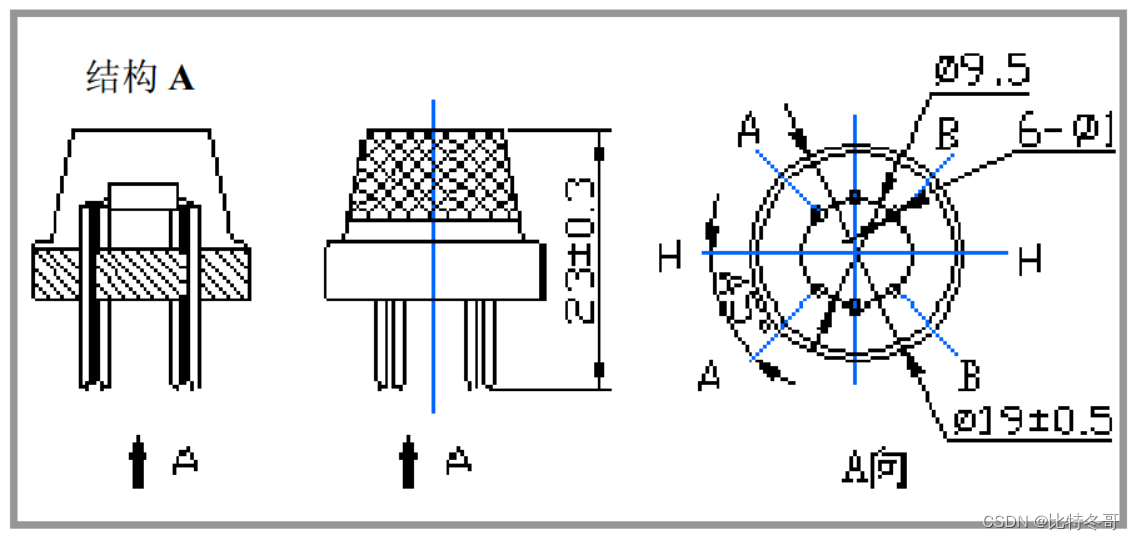
型号 QT-MQ-2 工作电压 DC5v 工作电流 150mA 产品类型 半导体器敏元器件 检测气体 烟雾、液化石油气、天然气和丙烷等 检测浓度 300~10000ppm(可燃气体) 尺寸 32mm×20mm×22mm 输出 支持开关数字信号、浓度模拟信号输出 重量 7.4g 二、工作原理
MQ-2型烟雾传感器属于二氧化锡半导体气敏材料,属于表面离子式N型半导体。处于200~3000摄氏度时,二氧化锡表面吸附空气中的氧,形成氧的负离子吸附,使半导体中的电子密度减少,从面使其电阻值增加。当与烟雾接触时,如果晶粒间界处的势垒收到烟雾的调至面变化,就会引起表面导电率的变化。利用这一点就可以获得这种烟雾存在的信息烟雾浓度越大导电率越大,输出电阻越低,则输出的模拟信号就越大。
1. 引脚说明:
VCC:电源正极接口,可外接3.3~5v供电电源
GND:电源负极接口,可外接电源负极或地线(GND)
DO:数字信号输出接口(0和1),可外接单片机的GPIO
AO:模拟信号输出接口,可外接单片的ADC采样通道2. 硬件连接:
模块引脚 GPIO VCC 3.3V / 5V GND GND DO NC(空) AD PA1 用杜邦线把模块的VCC和GND分别与单片机的3.3V(或5V)和GND连接;
把DO与单片机的其中一个GPIO连接;
把AD与单片机的其中一个ADC采样通道连接。注:传感器通电后,需要先预热约60s后测量的数据才稳定。通电后传感器会出现正常的轻度发热现象,因为内部有电热丝。
3. 烟雾检测
当可燃气体浓度小于指定的阈值时,DO输出高电平,大于指定的阈值时则输出低电平。4. 阈值调节
模块中蓝色的电位器是用于调节阀值,顺时针旋转,阈值会越大,逆时针越小。5. 使用AO接口
与DO不同,AO会输出模拟信号,因此需要与单片机的ADC采样通道连接。单片机可以通过此模拟信号来获取可燃气体浓度大小。6. 原理图
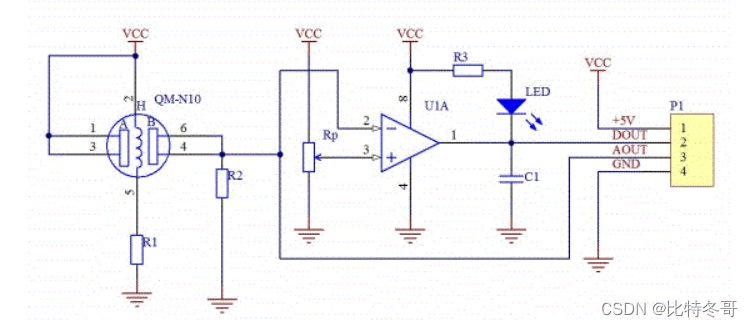
三、程序设计
ADC
#include "adc.h" #include "delay.h" //初始化ADC //这里我们仅以规则通道为例 //我们默认将开启通道0~3 void Adc_Init(void) { ADC_InitTypeDef ADC_InitStructure; GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |RCC_APB2Periph_ADC1, ENABLE ); //使能ADC1通道时钟 RCC_ADCCLKConfig(RCC_PCLK2_Div6); //设置ADC分频因子6 72M/6=12,ADC最大时间不能超过14M //PA1 作为模拟通道输入引脚 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入引脚 GPIO_Init(GPIOA, &GPIO_InitStructure); ADC_DeInit(ADC1); //复位ADC1 ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1和ADC2工作在独立模式 ADC_InitStructure.ADC_ScanConvMode = DISABLE; //模数转换工作在单通道模式 ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //模数转换工作在单次转换模式 ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //转换由软件而不是外部触发启动 ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐 ADC_InitStructure.ADC_NbrOfChannel = 1; //顺序进行规则转换的ADC通道的数目 ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStruct中指定的参数初始化外设ADCx的寄存器 ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1 ADC_ResetCalibration(ADC1); //使能复位校准 while(ADC_GetResetCalibrationStatus(ADC1)); //等待复位校准结束 ADC_StartCalibration(ADC1); //开启AD校准 while(ADC_GetCalibrationStatus(ADC1)); //等待校准结束 // ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能 } //获得ADC值 //ch:通道值 0~3 u16 Get_Adc(u8 ch) { //设置指定ADC的规则组通道,一个序列,采样时间 ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_239Cycles5 ); //ADC1,ADC通道,采样时间为239.5周期 ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能 while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));//等待转换结束 return ADC_GetConversionValue(ADC1); //返回最近一次ADC1规则组的转换结果 } u16 Get_Adc_Average(u8 ch,u8 times) { u32 temp_val=0; u8 t; for(t=0;t<times;t++) { temp_val+=Get_Adc(ch); delay_ms(5); } return temp_val/times; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
USART
#include "sys.h" #include "usart.h" #if SYSTEM_SUPPORT_OS #include "includes.h" //ucos 使用 #endif #if 1 #pragma import(__use_no_semihosting) //标准库需要的支持函数 struct __FILE { int handle; }; FILE __stdout; //定义_sys_exit()以避免使用半主机模式 void _sys_exit(int x) { x = x; } //重定义fputc函数 int fputc(int ch, FILE *f) { while((USART1->SR&0X40)==0);//循环发送,直到发送完毕 USART1->DR = (u8) ch; return ch; } #endif /*使用microLib的方法*/ /* int fputc(int ch, FILE *f) { USART_SendData(USART1, (uint8_t) ch); while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {} return ch; } int GetKey (void) { while (!(USART1->SR & USART_FLAG_RXNE)); return ((int)(USART1->DR & 0x1FF)); } */ #if EN_USART1_RX //如果使能了接收 //串口1中断服务程序 //注意,读取USARTx->SR能避免莫名其妙的错误 u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节. //接收状态 //bit15, 接收完成标志 //bit14, 接收到0x0d //bit13~0, 接收到的有效字节数目 u16 USART_RX_STA=0; //接收状态标记 void uart_init(u32 bound) { //GPIO端口设置 GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟 //USART1_TX GPIOA.9 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9 //USART1_RX GPIOA.10初始化 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10 //Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 //USART 初始化设置 USART_InitStructure.USART_BaudRate = bound;//串口波特率 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断 USART_Cmd(USART1, ENABLE); //使能串口1 } void USART1_IRQHandler(void) //串口1中断服务程序 { u8 Res; #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS. OSIntEnter(); #endif if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾) { Res =USART_ReceiveData(USART1); //读取接收到的数据 if((USART_RX_STA&0x8000)==0)//接收未完成 { if(USART_RX_STA&0x4000)//接收到了0x0d { if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始 else USART_RX_STA|=0x8000; //接收完成了 } else //还没收到0X0D { if(Res==0x0d)USART_RX_STA|=0x4000; else { USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ; USART_RX_STA++; if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收 } } } } #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS. OSIntExit(); #endif } #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
main
int main(void) { u16 adcx; float temp; delay_init(); //延时函数初始化 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级 uart_init(115200); //串口初始化为115200 Adc_Init(); //ADC初始化 while(1) { adcx=Get_Adc_Average(ADC_Channel_1,10); printf("\r\n ADC模拟信号为: %d \r\n\r\n",adcx); //ADC的值 temp=adcx*(3.3/4096); printf("\r\n 数字电压为: %f \r\n\r\n",temp);//电压值 delay_ms(250); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
-
相关阅读:
使用Cisco进行模拟配置OSPF路由协议
从机器语言到现代编程语言的飞跃
K线形态识别_倒锤头线和射击之星(流星、扫帚星)
浅入浅出分布式事务
C#WPF动态资源和静态资源应用实例
IO流 之 转换流( InputStreamReader 字节输入转换流 和 OutputStreamWriter 字节输出转换流)
数字孪生城市总体架构进一步迭代更新
看完这篇 教你玩转渗透测试靶机vulnhub——FunBox7( EASYENUM)
C语言经典面试题目(十八)
螺丝扭断力试验机SJ-12
- 原文地址:https://blog.csdn.net/Dustinthewine/article/details/126543605