-
STM8S TIM1寄存器 PWM呼吸灯
STM8S TIM1寄存器 PWM呼吸灯
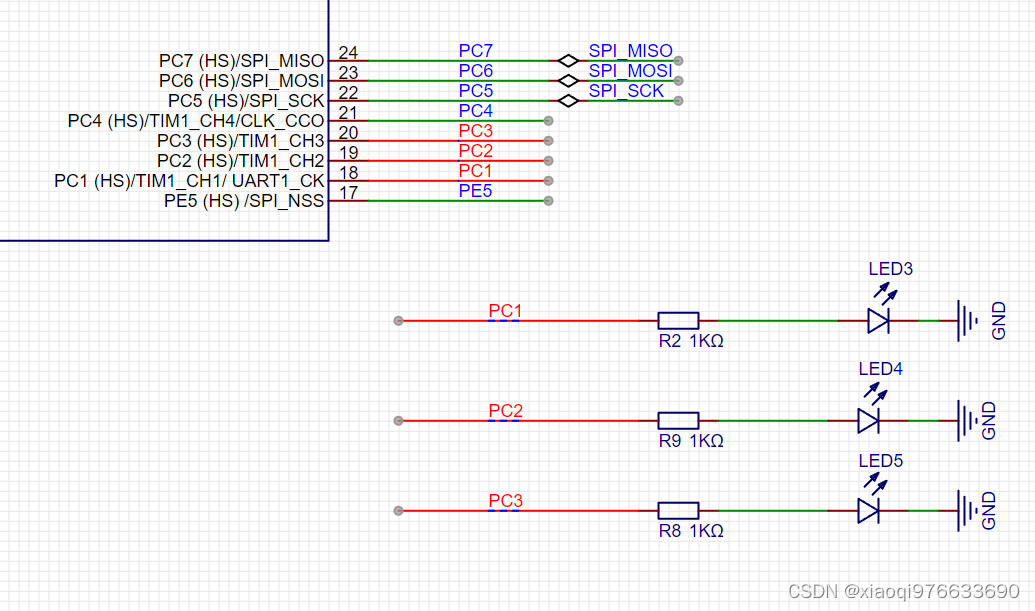
原理图:
1.TIM1 初始化
void TIM1_Init(void) { TIM1_PSCRH = 0; TIM1_PSCRL = 15; //(15+1)分频为1M TIM1_ARRH = 0x03; TIM1_ARRL = 0xE8; //每1000us中断一次 TIM1_CCMR2_OC2M = 6; //PWM2模式1 TIM1_CCER1_CC2E = 1; //CC2引脚使能 TIM1_CCMR3_OC3M = 6; //PWM3模式1 TIM1_CCER2_CC3E = 1; //CC3引脚使能 TIM1_CCR2H = 0X00; //DUTY TIM1_CCR2L = 0x00; TIM1_CCR3H = 0X00; //DUTY TIM1_CCR3L = 0x00; TIM1_BKR |= 0x80; //设置刹车寄存器 TIM1_IER = 0x01; //允许更新中断 TIM1_CR1 = 0x01; //计数器使能,开始计数 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
2.设置占空比
void pwm1_duty(u16 duty) { TIM1_CCR2H=duty>>8; TIM1_CCR2L=(u8)(duty); TIM1_CCR3H=duty>>8; TIM1_CCR3L=(u8)(duty); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
3.呼吸
while(1) { if(key_value>=1000) dir=0; if(key_value<=1) dir=1; if(dir) key_value++; else key_value--; pwm1_duty(key_value); delay_ms(3); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
4.实验现象:

-
相关阅读:
4.1 Windows驱动开发:内核中进程与句柄互转
chromium源码的下载与编译
【无标题】
ThreadFactory 实例创建方式
web测试——业务测试2
上海亚商投顾:A股持续调整 券商成做空主力
Damask使用指南-Hcp结构(镁(考虑孪晶))孪晶如何加入
TypeScript + react 中 TypeScript 的加入后 , 有哪些优化项目
正则表达式
生产型企业如何搭建进销存管理系统?低代码平台了解一下
- 原文地址:https://blog.csdn.net/xiaoqi976633690/article/details/126502926
