-
A-LOAM及禾赛LiDAR调试记录(上)
A-LOAM调试记录
环境配置
所需环境:
Ubuntu and ROS
Ceres Solver
Ubuntu and ROS
pass
Ceres Solver
主要用于求解优化问题
通过对测量获取的不十分可靠的数据和理想化的预测模型进行优化处理获取尽可能接近真实值的结果
-
依赖安装
# CMake sudo apt-get install cmake # google-glog + gflags sudo apt-get install libgoogle-glog-dev libgflags-dev # Use ATLAS for BLAS & LAPACK sudo apt-get install libatlas-base-dev # Eigen3 sudo apt-get install libeigen3-dev # SuiteSparse (optional) sudo apt-get install libsuitesparse-dev- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
git clone https://ceres-solver.googlesource.com/ceres-solver- 1
-
build, test, and install Ceres
tar zxf ceres-solver-2.1.0.tar.gz mkdir ceres-bin cd ceres-bin cmake ../ceres-solver-2.1.0 make -j3 make test # Optionally install Ceres, it can also be exported using CMake which # allows Ceres to be used without requiring installation, see the documentation # for the EXPORT_BUILD_DIR option for more information. sudo make install- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
-
验证安装结果
bin/simple_bundle_adjuster ../ceres-solver-2.1.0/data/problem-16-22106-pre.txt- 1
PCL
$ sudo apt install libpcl-dev- 1
Build A-LOAM
cd ~/catkin_ws/src git clone https://github.com/HKUST-Aerial-Robotics/A-LOAM.git cd ../ catkin_make source ~/catkin_ws/devel/setup.bash- 1
- 2
- 3
- 4
- 5
问题记录
环境:
Ubuntu:20.01
gcc:9.4.0
-
#error PCL requires C++14 or above
catkin_make报错
解决方法:
open the CMakeLists.txt at /catkin_ws/src/ti_mmwave_rospkg
change the line add_definitions(-std=c++11) to add_definitions(-std=c++14) -
版本兼容问题?(或许
- 将scanRegistration.cpp中的 #include
修改为#include - 将kittiHelper.cpp中 CV_LOAD_IMAGE_GRAYSCALE修改为 cv::IMREAD_GRAYSCALE
- 将scanRegistration.cpp中的 #include
NSH indoor outdoor 数据集
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch rosbag play {{YOUR_DATASET_FOLDER}}/nsh_indoor_outdoor.bag- 1
- 2
运行结果:

禾赛32线LiDAR
调试
查看网卡信息
ifconfig- 1
配置ip
sudo ifconfig {{gateway_name}} 192.168.1.100- 1
测试连接
ping 192.168.1.201- 1
配置launch文件(检查IP与端口)
vim .../xxx.launch- 1
运行launch
roslaunch {{package_name}} xxx.launch- 1
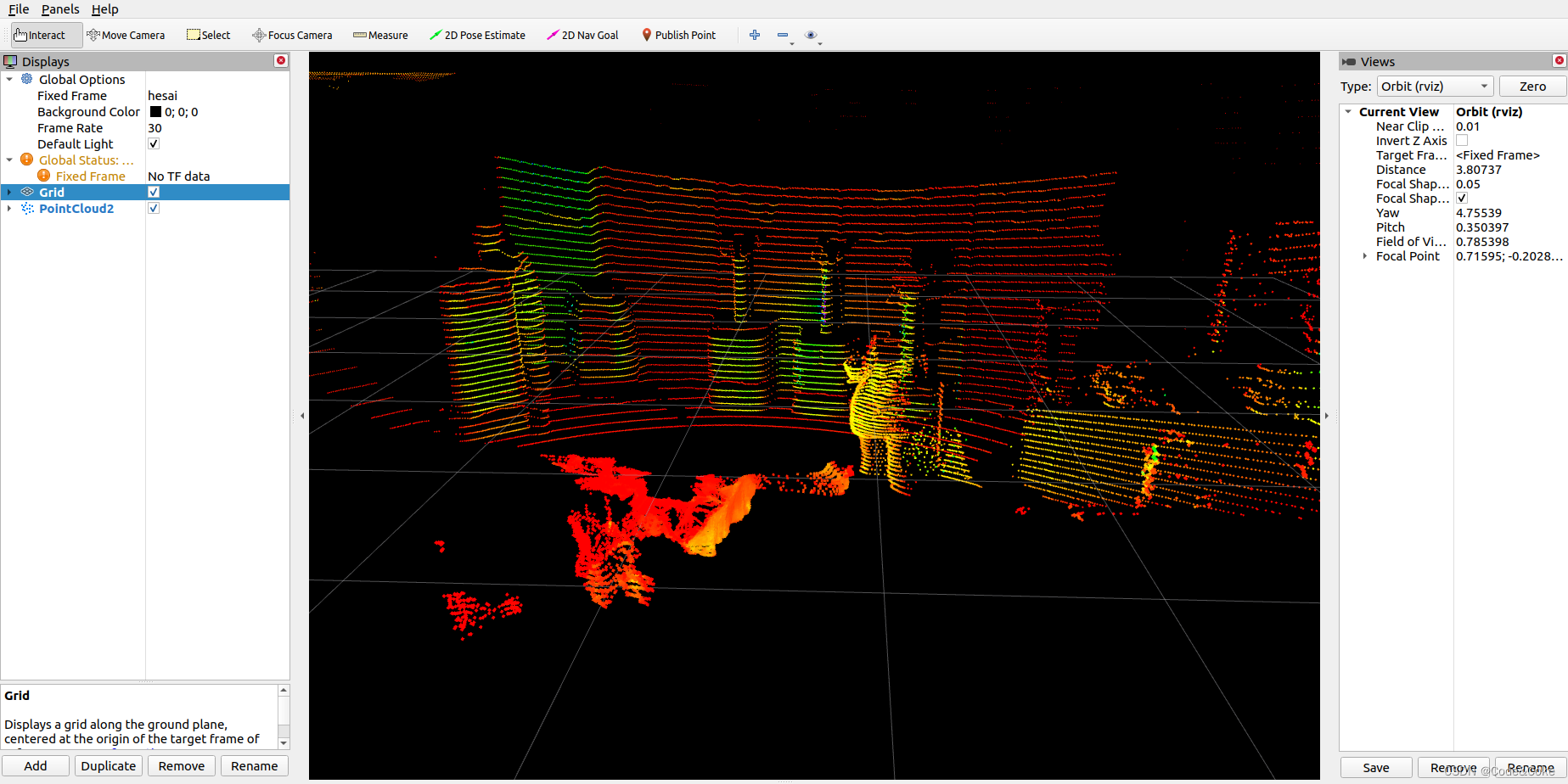
运行rviz可视化结果
roscore rosrun rviz rviz- 1
- 2
配置rviz
- Fixed Frame //通过rostopic echo指令获得
- 添加Topic:PointCloud2
常用指令
sudo wireshark- 1
rostopic hz {{topic_name}}- 1
rostopic echo {{topic_name}} --noarr- 1
-
-
相关阅读:
使用Docker部署Gitlab的记录
服务的追踪-Sleuth
2023年【起重信号司索工(建筑特殊工种)】试题及解析及起重信号司索工(建筑特殊工种)操作证考试
【SAP Abap】SAP增强开发总结
代码生成器实现
Unity手机游戏发热发烫优化指南与技巧
python面试题总结(四)
代码随想录算法训练营第五十一天|309. 买卖股票的最佳时机含冷冻期、714. 买卖股票的最佳时机含手续费
前端vue实现双飞翼布局【flex布局和浮动布局】
spring事务失效场景
- 原文地址:https://blog.csdn.net/weixin_45568867/article/details/126472967