K
p
=
R
R
0
K
p
=
−
R
0
R
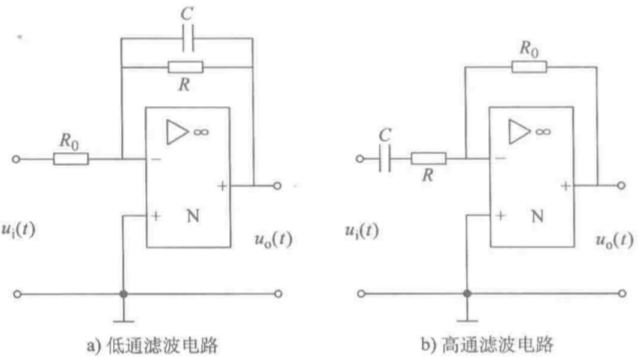
K_p=\frac{R}{R_0} ~~ K_p=-\frac{R_0}{R}
Kp=R0RKp=−RR0
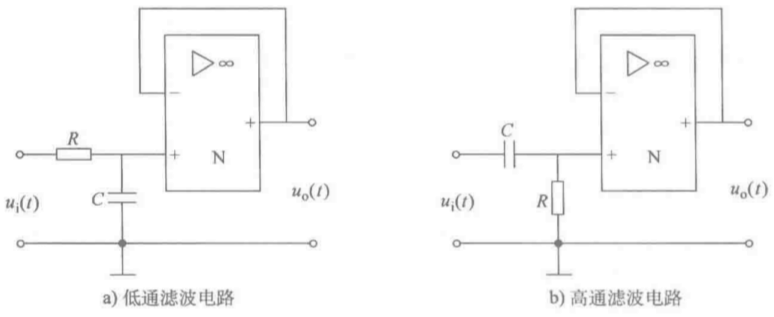
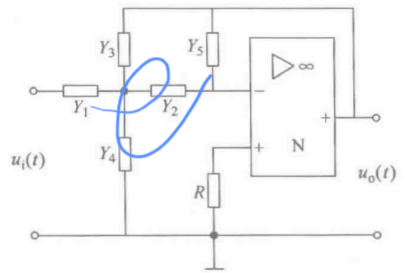
压控电压源型滤波电路
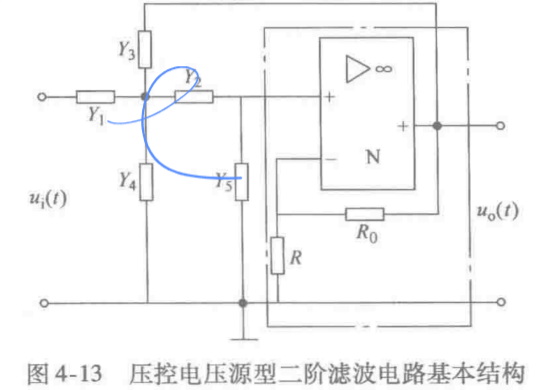
压控电压源型二阶滤波电路
H
(
s
)
=
K
f
Y
1
Y
2
(
Y
1
+
Y
2
+
Y
3
+
Y
4
)
Y
5
+
[
Y
1
+
(
1
−
K
f
)
Y
3
+
Y
4
]
Y
2
H(s)=\frac{K_fY_1Y_2}{(Y_1+Y_2+Y_3+Y_4)Y_5+[Y_1+(1-K_f)Y_3+Y_4]Y_2}
H(s)=(Y1+Y2+Y3+Y4)Y5+[Y1+(1−Kf)Y3+Y4]Y2KfY1Y2
H
(
s
)
=
K
f
1
R
1
1
R
2
(
1
R
1
+
1
R
2
+
s
C
1
)
s
C
2
+
[
1
R
1
+
(
1
−
K
f
)
s
C
2
]
1
R
2
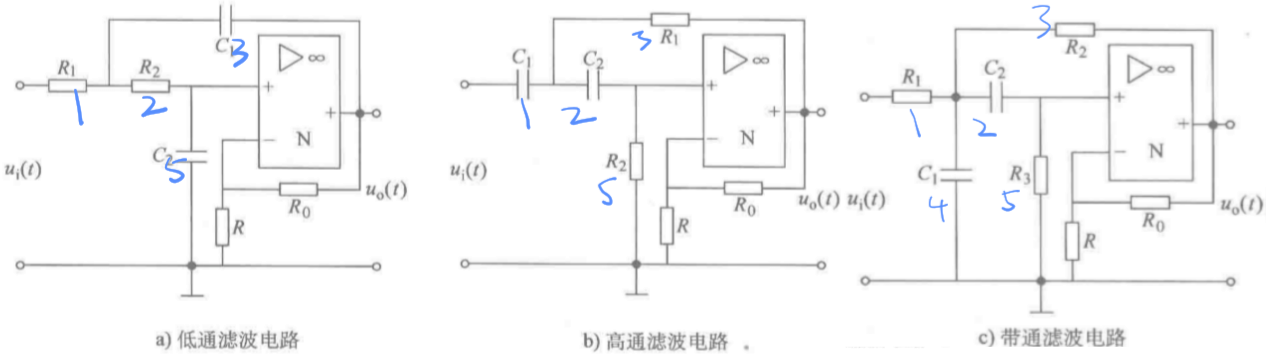
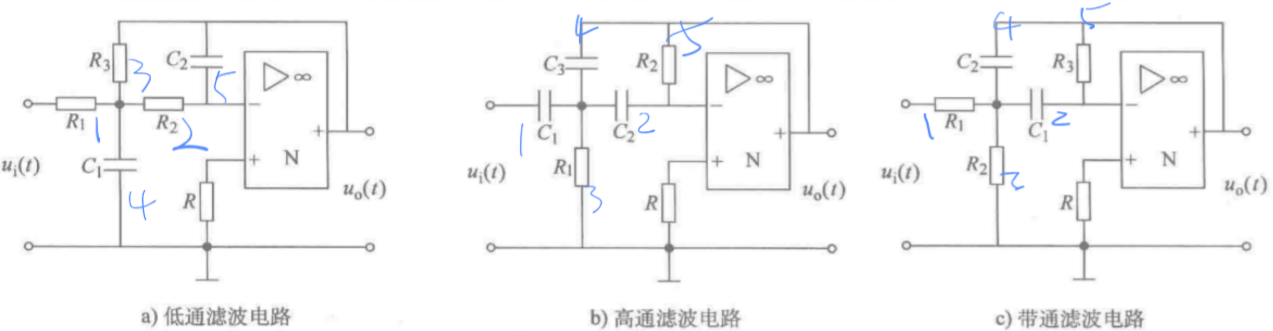
H(s)=\frac{K_f\frac{1}{R_1}\frac{1}{R_2}}{(\frac{1}{R_1}+\frac{1}{R_2}+sC_1)sC_2+[\frac{1}{R_1}+(1-K_f)sC_2]\frac{1}{R_2}}
H(s)=(R11+R21+sC1)sC2+[R11+(1−Kf)sC2]R21KfR11R21
H
(
s
)
=
K
f
s
C
1
s
C
2
(
s
C
1
+
s
C
2
+
1
R
1
)
1
R
2
+
[
s
C
1
+
(
1
−
K
f
)
1
R
2
]
s
C
2
H(s)=\frac{K_fsC_1sC_2}{(sC_1+sC_2+\frac{1}{R_1})\frac{1}{R_2}+[sC_1+(1-K_f)\frac{1}{R_2}]sC_2}
H(s)=(sC1+sC2+R11)R21+[sC1+(1−Kf)R21]sC2KfsC1sC2
H
(
s
)
=
K
f
1
R
1
s
C
2
(
1
R
1
+
s
C
2
+
1
R
2
+
s
C
1
)
1
R
3
+
[
1
R
1
+
(
1
−
K
f
)
1
R
3
+
s
C
1
]
s
C
2
H(s)=\frac{K_f\frac{1}{R_1}sC_2}{(\frac{1}{R_1}+sC_2+\frac{1}{R_2}+sC_1)\frac{1}{R_3}+[\frac{1}{R_1}+(1-K_f)\frac{1}{R_3}+sC_1]sC_2}
H(s)=(R11+sC2+R21+sC1)R31+[R11+(1−Kf)R31+sC1]sC2KfR11sC2
无限增益多路反馈型电路
H
(
s
)
=
−
Y
1
Y
2
(
Y
1
+
Y
2
+
Y
3
+
Y
4
)
Y
5
+
Y
2
Y
3
H(s)=-\frac{Y_1Y_2}{(Y_1+Y_2+Y_3+Y_4)Y_5+Y_2Y_3}
H(s)=−(Y1+Y2+Y3+Y4)Y5+Y2Y3Y1Y2
H
(
s
)
=
1
R
1
1
R
2
(
1
R
1
+
1
R
2
+
1
R
3
+
s
C
1
)
s
C
2
+
1
R
2
1
R
3
H(s)=\frac{\frac{1}{R_1}\frac{1}{R_2}}{(\frac{1}{R_1}+\frac{1}{R_2}+\frac{1}{R_3}+sC_1)sC_2+\frac{1}{R_2}\frac{1}{R_3}}
H(s)=(R11+R21+R31+sC1)sC2+R21R31R11R21
H
(
s
)
=
s
C
1
s
C
2
(
s
C
1
+
s
C
2
+
s
C
3
+
1
R
1
)
1
R
2
+
s
C
2
s
C
3
H(s)=\frac{sC_1sC_2}{(sC_1+sC_2+sC_3+\frac{1}{R_1})\frac{1}{R_2}+sC_2sC_3}
H(s)=(sC1+sC2+sC3+R11)R21+sC2sC3sC1sC2
H
(
s
)
=
1
R
1
s
C
1
(
1
R
1
+
s
C
1
+
s
C
2
+
1
R
2
)
1
R
3
+
s
C
1
s
C
2
H(s)=\frac{\frac{1}{R_1}sC_1}{(\frac{1}{R_1}+sC_1+sC_2+\frac{1}{R_2})\frac{1}{R_3}+sC_1sC_2}
H(s)=(R11+sC1+sC2+R21)R31+sC1sC2R11sC1