-
【论文精读】Fast R-CNN
《Fast R-CNN》是同一个作者基于自己之前的R-CNN工作的改进。
Fast R-CNN也是基于深度卷积神经网络用于计算机视觉任务(主要用于目标检测)的算法。
他在R-CNN的基础上进行了大幅创新,比如将目标的分类和定位的步骤进行了统一,实现了端到端的训练、预测流程。
Fast R-CNN在使用VGG-16的主干网络时,训练速度比R-CNN快9倍,测试速度快了213倍,并提升了检测精度。
训练速度比SPPnet快了3倍,测试速度快了10倍,并提升了精度。本文是对论文的精读总结,我会把每一个点都研究讲透,不仅让大家了解Fast R-CNN,还会总结自己在读论文各个部分时自己的心得总结。
Fast R-CNN的前作R-CNN论文精读可参考我的这篇文章。背景
为什么提出了Fast R-CNN?
作者指出之前的目标检测算法 R-CNN 和 SPPnet 都存在各种缺点。R-CNN的缺点
R-CNN的缺点:
- 训练是是多阶段的。首先需要训练一个CNN网络用于图像特征的提取。
接着需要训练一个线性SVM分类器,对提取出来的特征进行图片分类。
最后还需要训练一个回归模型,用于调整目标检测候选框的定位。 - 训练非常贵。因为是多阶段的目标检测,先需要保存每一张图片上的每一个候选框抽取的特征,然后再进行训练。
因此,需要将这些特征存到磁盘上。
不仅提取特征耗时,并且储存特征还耗费空间。 - 测试时,目标检测速度很慢。一个使用VGG-16主干模型的R-CNN,预测一张图片需要耗费47秒的时间(在GPU)上。
作者指出R-CNN慢的根源在于每一个候选框都使用同个CNN网络前向计算,它们之间存在大量重复运算,没有共享计算资源。
为了解决这个问题,后面有大佬(何凯明等)提出了SPPnet。SPPnet解决的问题和缺点
SPPnet概要:
SPPnet将整张图片经过一次CNN网络前向计算,在最后进入全连接层之前使用了一个SPP层(空间金字塔池化层),而非普通的最大池化层。如下图。
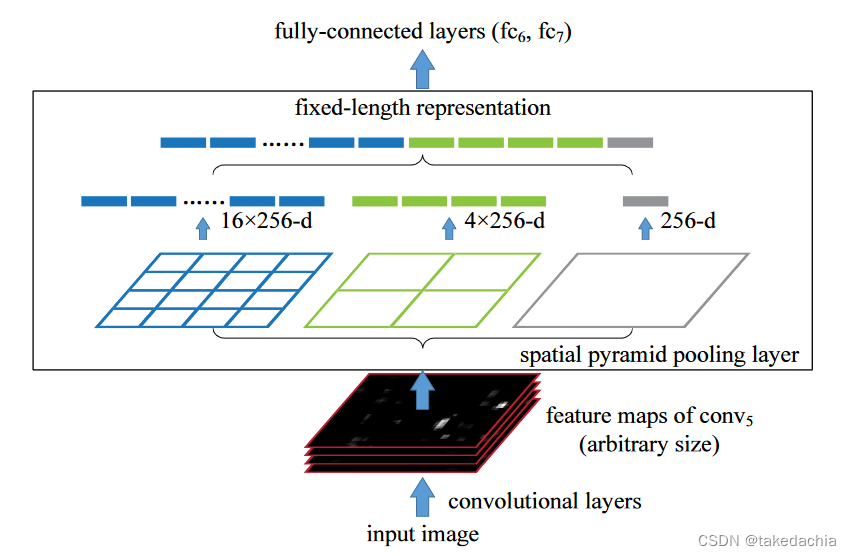
SPP层中,会将卷积层输出的convolutional feature map(图中的feature maps of conv5,它可以任意尺寸)进行一种固定输出的池化,如上图。不管如输入的image的尺寸如何变化,在最后SPP层都会固定输出 1个4×4的特征图、1个2×2的特征图、1个1×1的特征图(具体使用到了动态池化核和步长的算法),类似金字塔堆叠的感觉,最后将这些固定的特征图展品成21×256固定长度的向量传入全连接层。
这样做的好处:
①这里先解决了输入图片固定的问题,让图片无需固定尺寸输入CNN。
②其次每一张图片对应的2000个候选框都可以在最后SPP层前的convolutional feature map中找到对应位置的小区域,将图片中候选框的区域映射到convolutional feature map的对应区域。用抠出来的这块小特征图(下图中的window)进行SPP池化,输出固定特征。(如下图)

这样我们仅需一次前向CNN网络的传播计算,就可以将所有候选框的特征提取出来(不用跑2000次了)。
这就解决了上面R-CNN中共享计算的问题,这会加快检测的速度。
但是SPPnet算法将空间金字塔池化层最后提取到的向量依然使用一个线性SVM分类器和一个回归器进行分类和定位,和R-CNN一样依然是多阶段的。这样依然不能解决R-CNN中多阶段训练慢、耗费资源多的问题(前面的第1、2点)。
并且同时,作者提出了在SPPnet中,使用fine tuning对CNN网络微调训练时,SPP层前的网络参数难以被更新,这会影响目标检测的精度(这个会在后面详述)。Fast R-CNN的优点
作者提出的Fast R-CNN解决了以上R-CNN和SPPnet的缺点,同时提升了训练和测试速度,并提升精度。
Fast R-CNN的特点:- 比R-CNN和SPPnet更高的检测精度。
- 使用了一个多任务的损失函数,是一个单阶段的训练过程
- 训练时可更新所有网络层的参数
- 不再需要将提取的候选框特征缓存到磁盘上
Fast R-CNN模型结构
我们来看Fast R-CNN的模型结构(如下图):
网络的输入为 一张图像+一组目标候选框(也是通过selective search生成)信息。①图像经过CNN网络后,在最后一个卷积层输出一组Conv feature map。
目标候选框信息,则通过RoI projection,即目标位置的投影,投影定位到Conv feature map对应位置,抠出这块小feature map。②我们将抠出的这块小feature map传入 RoI pooling layer。
经过这个RoI pooling layer,我们可提取出一个固定长度的特征向量。③将这个特征向量同时传入两个模块。
传入全连接层+softmax分类,用于预测 K + 1 K+1 K+1个类别的概率。
传入 bounding-box 回归器,用于预测每一个类别的定位。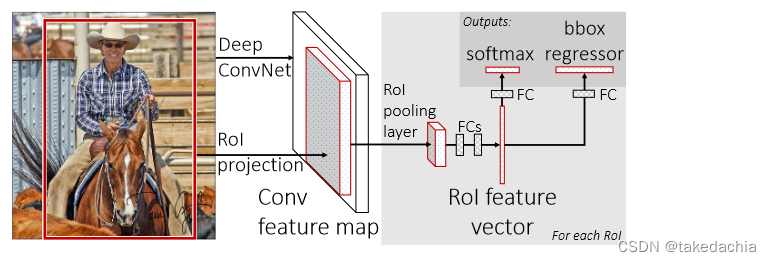
可以看到相比R-CNN(下图)而言,该模型有三个不同的地方:
- 传入的不再是目标候选框,而是一整张图片+候选框的定位信息,输出整张图片的feature map。再利用候选框的定位信息进行位置投影,找到候选框在feature map上的对应位置,抠出来传入下一层。这样解决了CNN网络重复计算的问题,不用再对一张图片2000个候选框进行2000次前向计算了,只需1次计算就可以。
- 模型没有对输入的图片进行大小限制,因此输出的 (conv) feature map有大有小,抠出来的小feature map也有大有小。论文使用了 RoI pooling layer,将不同尺寸的小feature map统一池化下采样成固定大小的特征向量(取代了普通CNN网络的最后一个Max Pooling层)。(RoI pooling layer的原理下面细讲)
- 对特征向量进行分类预测时,不再使用线性SVM分类器,而是直接使用softmax输出各个类别的概率。这样就不用再特地对每个类别训练线性SVM分类器了。这个设计也是和单阶段训练的设计相统一,后面会详细讲到。
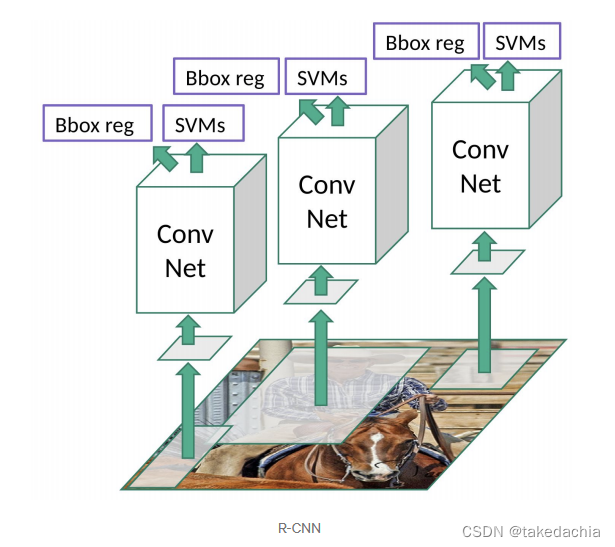
(上图摘自towardsdatascience)
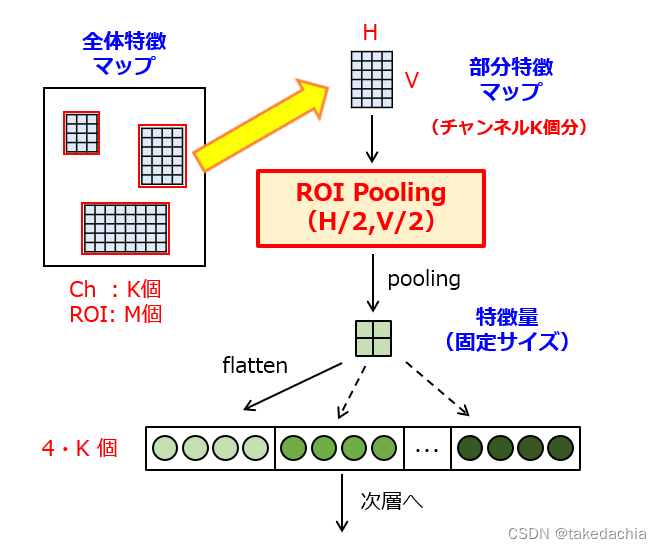
RoI pooling layer
RoI pooling层是一类特殊的自适应Max Pooling层,是一种根据当前feature map尺寸动态指定池化核和步长的Max Pooling,它其实是沿袭了SPPnet中SPP层(空间金字塔池化层)的设计。
我举个两个例子详细地说明RoI pooling layer做了一件什么事:
①假设我们在一个conv feature map中,根据映射关系取到其中一个C×13×13的小feature map进入RoI pooling层,我们想指定输出C×4×4大小的特征向量。
对于我们的Max Pooling:
池化核的size是feature map的size除以输出的size后向上取整,即size=ceil(13/4)=4
步长stride则是feature map的size除以输出的size后向下取整,即size=floor(13/4)=3
这样得到的池化结果正好是一个4×4的输出。
详见下图。最后我们将输出展平,得到C×16的一个特征向量。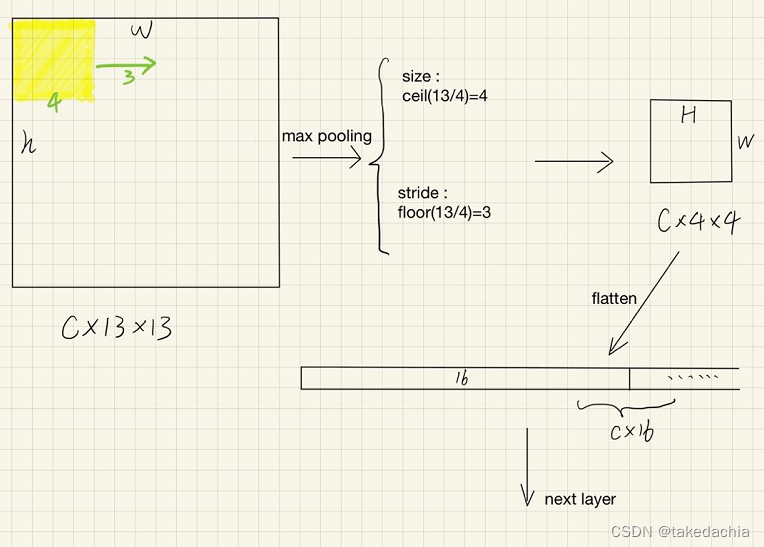
②本例是一个feature map非正方形的例子(图摘自benrishi.ai)
假设我们对图中这个6×4的feature map进行RoI pooling,设定输出2×2大小的特征图。
那么Max pooling的池化核和步长在水平和垂直方向应当各有自己的size和stride。
文中作者并没有详细说明非正方形的情况下如何进行pooling,根据我对作者论文RoI pooling这段描述的理解,矩形feature map的池化参数应为:kernel_size=( ceil(6/2), ceil(4/2) )=(3,2)
stride=( floor(6/2), floor(4/2) )=(3,2)即池化核大小为(3,2),步长在垂直方向为3,水平方向为2。
(PS:也符合Pytorch中nn.MaxPool2d层中的参数规范)
这样池化得到的特征图也是2×2。我们还可以取下图中5×8这张小feature map自行验证一下。
以上就是RoI pooling layer的详解,通过一种的自适应Max Pooling层,固定输出的size。作者自己也说了RoI pooling是借鉴自SPPnet的SPP层,是SPP层的一种特殊情况。
模型的训练细节
总体上模型使用Fine-tuning的方法,对预训练好的图像分类模型修改后进行微调训练。
同时,微调训练是单阶段的流程,即用一个损失函数同时优化softmax和bbox回归器,训练一步到位。(不像R-CNN和SPPnet需要训练3个模块)构建模型(基于预训练CNN网络进行修改)
作者使用了在ImgeNet图像分类数据集上预训练好的CNN模型(如AlexNet、VGG-16等),对其进行如下修改。
- 将网络最后一个Max Pooling改成RoI Pooling层。
- 将网络最后的全连接+softmax层改成了两个并行的层,即前面所述的:
①全连接层+softmax,用于预测 K + 1 K+1 K+1个类别的概率。
② bounding-box 回归器,用于预测每一个类别的定位。 - 将网络的输入改成 图片+图片中目标候选框定位信息。
为什么SPPnet训练时难以更新卷积网络的权重?(关于训练时的采样方法)
作者在文中提到了Fast R-CNN可通过反向传播训练整个网络的权重参数。
论文这里对上面提出的SPPne使用fine tuning对CNN网络微调训练时,网络的参数难以被更新进行了详细解释。
作者在文中使用了"SPPnet is unable to update weights"的说法,我觉得更合适的说法是难以更新。我搜了全网都找不到一个比较详细的解答,所以我自己画了一张图详细讲述一下是难以更新参数是怎么回事。
首先要明确,这个问题和Fast R-CNN的采样方法息息相关,这个问题直接指导了Fast R-CNN在训练时对一个mini-batch的采样方法。
我画了一张图,对比了Fast-R-CNN和SPPnet的训练差异:
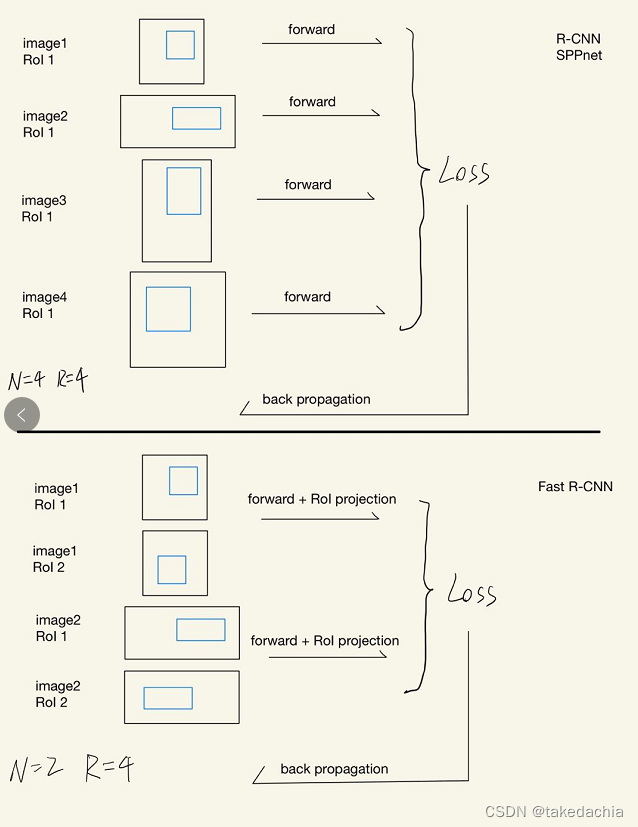
上半部分是SPPnet/R-CNN的训练流程。假设我们的batch_size设为4,根据平均采样的原则,一般是4张图片中各自的候选框进入前向传播,由于是4张不同的图片,所以我们需要经过4次正向传播。然后算出Loss,再进行反向传播。
下半部分是Fast R-CNN的训练流程。我们依然设batch_size为4,但我们使用了分层抽样的原则。因为每个图片都有2000个候选框,所以我们先抽取若干张图片,再在每张图片中抽取多个候选框。比如我们抽取2张图片(N=2),每张图片抽取2个候选框。这样的话对于Fast R-CNN每个图片只需要经过一次正向传播,对于候选框按位置进行映射抠图即可,在这个例子中我们只需要2次正向传播就能行。如果把batch_size放大到128,我们假设每个mini-batch只抽取2张图片,每张图片各自抽64个候选框,那么我们只需要2次正向传播就能扫完一个批次。
但是SPPnet/R-CNN则要128次正向传播,这样对算力的要求急剧增加。所以对于fine tuning来说,这是不效率的。这就是为什么SPPnet训练时难以更新卷积网络的权重的原因,并不是无法跟新,而是非常低效。
所以,文中作者采用的mini-batch采样策略为:
先随机采样2张图片,每张图片采样64个候选框,batch_size共计128。
这128个样本中,25%为正样本,其余为负样本(这个和R-CNN一样)。
其中,IoU大于0.5为正样本,IoU在0.1到0.5之间的为负样本。
此外,对IoU小于0.1的样本采用难例挖掘的策略(hard example mining)来训练。我的理解是,因为IoU小于0.1的样本数量非常多,所以值得挖掘,训练时对目标框IoU<0.1的样本进行预测,如预测有误就加入hard example错题集进入下一轮的训练。
此外,作者还使用了0.5概率的水平翻转作为数据增强的手段。多任务的损失函数
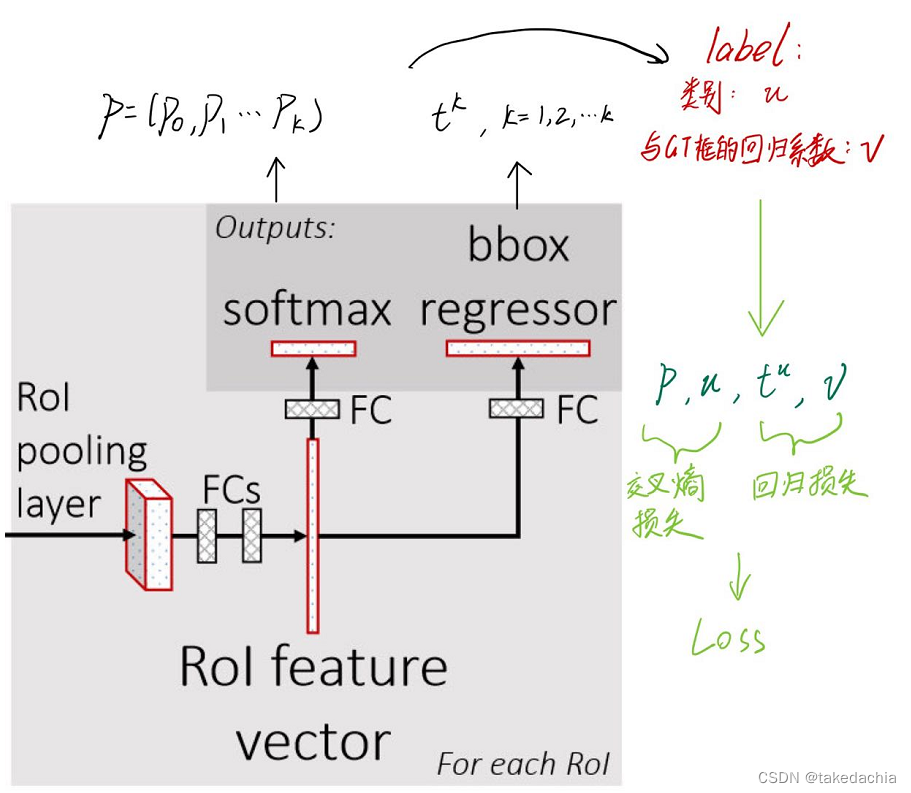
Fast R-CNN网络最后有两个输出,分别是softmax分类和bbox回归器,所以这是一个多目标优化问题。
对于这个两个目标的优化问题,作者的思路是将两个设计好的损失函数进行加和,把两个目标的优化问题简化成单目标优化问题。Fast R-CNN中,每个样本(候选框)都会输出:
一个离散概率分布 p = ( p 0 , … , p K ) p=\left(p_{0}, \ldots, p_{K}\right) p=(p0,…,pK),包含了k+1个类别的预测概率
一组回归系数 t k = ( t x k , t y k , t w k , t h k ) t^{k}=\left(t_{\mathrm{x}}^{k}, t_{\mathrm{y}}^{k}, t_{\mathrm{w}}^{k}, t_{\mathrm{h}}^{k}\right) tk=(txk,tyk,twk,thk), k k k对应各个分类。(注:对于回归系数和Bounding box regression,详细可见我这篇文章。)
每一轮的训练中,一个候选框都会有一个Ground-Truth相关的类别标签(记为类别号 u u u,其中0为背景类);还有一个基于Ground-Truth算出来的一组回归系数 v v v。
因为有了类别标签,我们的回归系数 t k t^{k} tk只需要关注 u u u类别的,因此我们只需要 t u t^{u} tu。
如下图,这样就可以对每个候选框分别计算softmax和回归器的Loss了。
我们的目的是设计出softmax和回归器各自的Loss后,加和后能成为一个单目标的优化问题,这样一个多任务损失函数能正常优化。
作者设计的损失函数为:
L ( p , u , t u , v ) = L c l s ( p , u ) + λ [ u ≥ 1 ] L l o c ( t u , v ) L\left(p, u, t^{u}, v\right)=L_{\mathrm{cls}}(p, u)+\lambda[u \geq 1] L_{\mathrm{loc}}\left(t^{u}, v\right) L(p,u,tu,v)=Lcls(p,u)+λ[u≥1]Lloc(tu,v)损失函数第一项即分类损失 L c l s L_{\mathrm{cls}} Lcls,为交叉熵损失函数。由于只有第 u u u项的真实概率为1,所以交叉熵损失函数项直接可直接等价成:
L c l s ( p , u ) = − log p u L_{\mathrm{cls}}(p, u)=-\log p_{u} Lcls(p,u)=−logpu
p u p_{u} pu为第 u u u项的概率,即对第 u u u项的预测概率取对数损失即可。
损失函数第二项是定位系数的回归器损失 L l o c L_{\mathrm{loc}} Lloc,作者这里采用了 smooth L 1 \operatorname{smooth}_{L_{1}} smoothL1 损失函数。表示为:
L l o c ( t u , v ) = ∑ i ∈ { x , y , w , h } smooth L 1 ( t i u − v i ) L_{\mathrm{loc}}\left(t^{u}, v\right)=\sum_{i \in\{\mathrm{x}, \mathrm{y}, \mathrm{w}, \mathrm{h}\}} \operatorname{smooth}_{L_{1}}\left(t_{i}^{u}-v_{i}\right) Lloc(tu,v)=i∈{x,y,w,h}∑smoothL1(tiu−vi)
暂先不管 smooth L 1 \operatorname{smooth}_{L_{1}} smoothL1。对于一个候选框样本,它有一个定位信息 i i i,它相对于类别 u u u的GT框会产生一个真实的偏移系数 v i v_i vi,还会根据回归器预测出一个偏移系数 t i u t_{i}^{u} tiu,从它俩之间构建损失函数。在R-CNN的bbox回归问题中(详见我这篇文章),回归器的损失函数是平方和,即 L 2 L_2 L2损失函数,它可以求得参数的解析解。
但是,Fast R-CNN中,我们需要同时优化两个任务(分类+定位)以构建端到端的训练,并且使用两者加和的方式转化为单目标优化问题。如果使用 L 2 L_2 L2损失,一旦 t i u t_{i}^{u} tiu和 v i v_i vi相差过大,因为平方项的关系,Loss值会非常大,可能会大交叉熵的Loss几个数量级。这样可能会造成学习困难,所以两个任务的Loss最好保持在一个量度上。
但是如果使用 L 1 L_1 L1损失的话,零点处又难以求导。所以作者采用了 smooth L 1 \operatorname{smooth}_{L_{1}} smoothL1 损失函数,在靠近0的区间范围内( [ − 1 , 1 ] [-1,1] [−1,1]),函数变成弯曲的形状便于求导。三者的函数图像如下图所示:
smooth L 1 \operatorname{smooth}_{L_{1}} smoothL1写成函数表达如下:
smooth L 1 ( x ) = { 0.5 x 2 if ∣ x ∣ < 1 ∣ x ∣ − 0.5 otherwise \operatorname{smooth}_{L_{1}}(x)=smoothL1(x)={0.5x2∣x∣−0.5 if ∣x∣<1 otherwise { 0.5 x 2 if | x | < 1 | x | − 0.5 otherwise 作者在论文中也提到,Smooth L1损失相较于L2对远端值不敏感。如果回归的范围没有限制,使用L2损失就需要仔细调学习率以防梯度爆炸。
最后, L l o c L_{\mathrm{loc}} Lloc前面的 [ u ≥ 1 ] [u \geq 1] [u≥1]项表示,类别号在大于等于1时,这个项为1。如 u = 0 u=0 u=0,即为背景类时,这个项等于0,即不计算回归损失。
再前面的 λ \lambda λ是加和系数,是超参数,作者认为将其设为1可平衡两个Loss任务。
综上,损失函数的设计将Fast R-CNN的训练变成了单阶段的训练,训练效率大大提升。
这是相较于R-CNN、SPPnet的一大创新点。关于 RoI pooling 层的梯度反传
论文这部分讲到了一个训练时的细节,即RoI pooling是怎么进行梯度反传的?
因为RoI pooling是一类Max pooling,我们先要知道Max pooling是怎么反向传播梯度的:
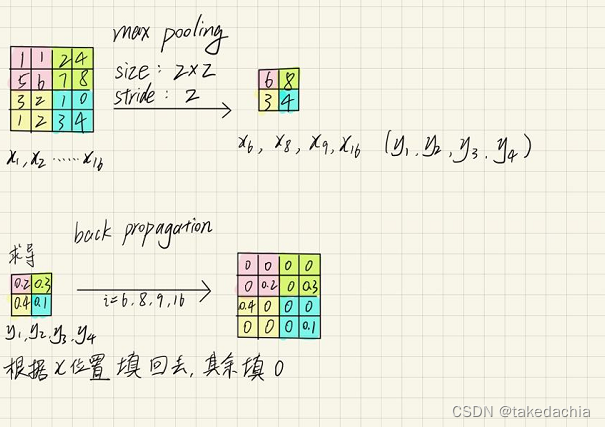
上图中我们对一张4×4的feature map做大小为2×2,步长为2的最大池化,得到一个2×2的output。并且这4个输出值 y 1 , y 2 , y 3 , y 4 y_1,y_2,y_3,y_4 y1,y2,y3,y4应当带上它在原feature map中的位置信息,即 x 6 , x 8 , x 9 , x 16 x_6,x_8,x_9,x_{16} x6,x8,x9,x16)。
对这个output求导后,各个位置的梯度大小应该反向赋给原feature map的对应位置,然后其余位置梯度都是0。
这就是max pooling的反向传梯度的过程。在实际问题中,我们经常会碰到池化核区域重叠的情况,即步长<尺寸。
当上一个池化核扫到的最大值 和 下一个扫到的最大值都是同一个位置的数,都位于重叠区域时,梯度又该怎么算呢?
如下图。
我们在算 x 4 x_4 x4处的梯度应当是最后 y 1 , y 2 y_1,y_2 y1,y2两处偏导数的和,因为它们对应的原feature map的位置是同一个。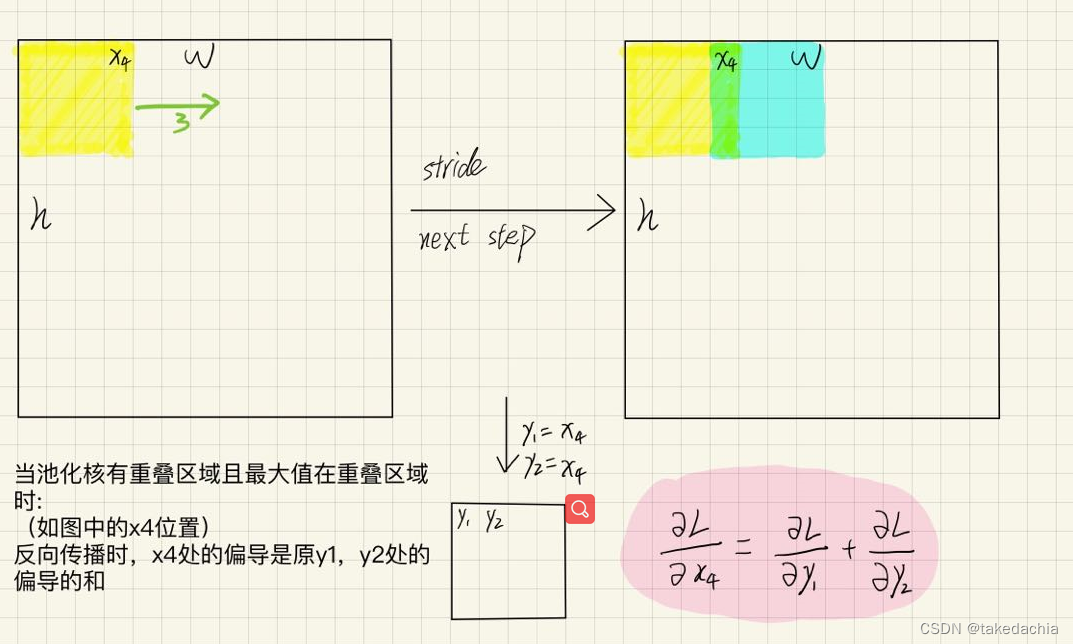
在RoI pooling中,梯度的反传和上面讲到的Max pooling机制是一样的。
有一点新的不同就是,Fast R-CNN训练时传入的一个mini-batch是从2张图片中各随机选取的64候选框。
我们以1张图片抽取64个候选框为例,我们需要在1张图片生成的conv feature map上抠出大大小小64张小feature map,再传入RoI pooling层。所以这些小feature map的位置一定会有重叠的情况,如果我们的max pooling取到的最大值恰好在重叠区域又怎么办呢?见下图:
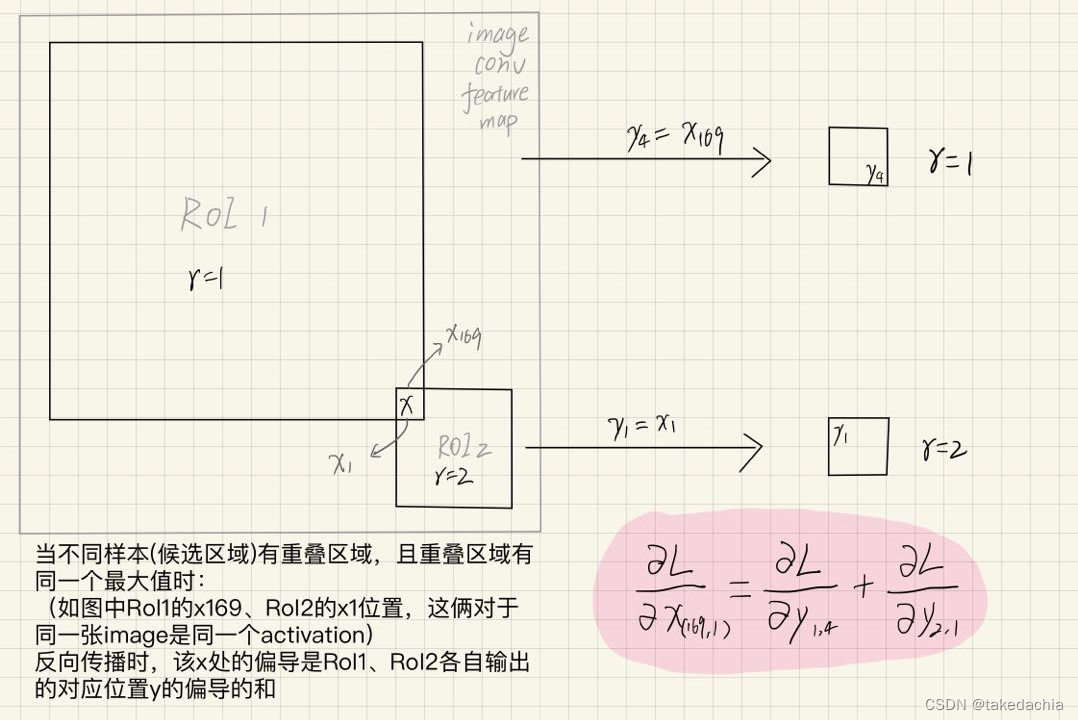
一张图片的conv feature map中有2个候选框映射,它们各自需要输出2×2的output。
假设它们之间如图位置有一重合处(对于框1为 x 169 x_{169} x169;对于框2为 x 1 x_1 x1),在各自max pooling后都选取了这个数作为对于位置的输出(框1输出在 y 4 y_4 y4,框2输出在 y 1 y_1 y1)。
本质上这是来自同一个位置的 x x x,那么此处的偏导也是框1、框2各自输出的对应位置 y y y的偏导的和。所以,在Fast R-CNN的RoI pooling层中,对一个输入的 x x x位置求偏导经历了两次加和,如output之间存在同源最大值,反向传播时就需要在源位置将梯度加和。
故论文中这个难懂的公式讲的就是上面这个意思,只要懂这个公式在做一件什么事即可:
∂ L ∂ x i = ∑ r ∑ j [ i = i ∗ ( r , j ) ] ∂ L ∂ y r j \frac{\partial L}{\partial x_{i}}=\sum_{r} \sum_{j}\left[i=i^{*}(r, j)\right] \frac{\partial L}{\partial y_{r j}} ∂xi∂L=r∑j∑[i=i∗(r,j)]∂yrj∂L关于尺度不变性
尺度不变性是目标检测模型的一个评估指标。
如果给你一张经过缩放的大图和小图,模型都能辨别出图片中有一匹马,马上骑着一个人的话,那么模型的尺度不变性比较好。提高模型的尺度不变性,可以在训练时将所有图片固定在一个尺寸,测试时也使用同一个尺寸,我们的目标是让模型自己去学习其中的尺度不变性。这称为单尺度目标检测。
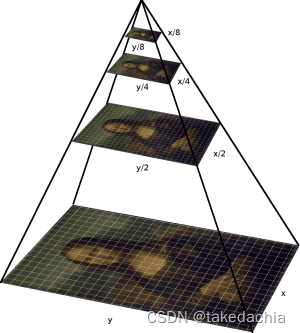
此外,还可以将图片在训练时随机缩放成1种预设的尺寸进行训练,这也是一种数据增强的方法。在测试时,将图片缩放成所有预设的尺寸,形成一个“图像金字塔”,对每个尺寸下的生成的候选框进行尺度归一化。这称为多尺度目标检测。
论文后面(试验结果2部分)作者会做一些实验来探索尺度不变性。
模型的测试细节
模型fine tuning训练好后,就可以进行测试环节了。
在对一张图片进行测试前,一样需要随机生成(通过selective search)大约2000个候选框的位置信息。
然后进入前向计算,之后会对结果用非极大值抑制算法处理多余的候选框(和R-CNN一样)。利用 截断性的SVD 加速推理
我们知道在Fast R-CNN模型的最后存在着大量的全连接层,如下图。
我们知道Fast R-CNN传入一张图片后,仅需要在CNN网络进行1次前向计算,再通过RoI project投影出对应的feature map,进入RoI池化。然后,输出的每一个特征向量(约2000个)都会经历一次全连接层的前向运算,再进入softmax和bbox regression。
故测试时的全连接层运算量远大于训练时。
作者指出,事实上测试时大量的算力都会耗费在全连接层的计算上。
我们知道全连接层的计算都是矩阵运算,对于一个矩阵 W W W,我们可以对其进行奇异值分解(SVD),将一个臃肿的矩阵简化成三个矩阵的乘积,我们可以对三个矩阵进行“瘦身”,取奇异值大小排名靠前的对应部分组成新的矩阵,且几乎不损耗原矩阵 W W W的信息:
W ≈ U Σ t V T W \approx U \Sigma_{t} V^{T} W≈UΣtVT
经过瘦身的矩阵运算速度将会大大提升。具体提升多少见后面的实验结果部分。
(SVD这部分具体知识细节可参考线性代数)实验结果1
模型的以下3项主要实验结果支持了Fast R-CNN的贡献:
- 在VOC2007、2010、2012数据集上有出色的精度
- 比R-CNN、SPPnet更快的训练、测试速度
- 使用主干网络为VGG-16模型时,微调卷积层的权重提升了检测精度
实验中作者主要使用了三种CNN模型作为Fast R-CNN的主干网络。
将以AlexNet为主干网络的模型称为S模型(small);
将以VGG_CNN_M_1024为主干网络的模型称为M模型(medium),它与S模型同深度,但更宽;
将以VGG-16为主干网络的模型称为L模型(largest),是最大的模型。在VOC数据集上的结果
下面3张表依次是VOC2007、2010、2012上的结果,并细分到了各个类别的精度。所有模型的主干网络都使用了VGG-16(即L模型)。
可以看到Fast R-CNN(文中的FRCN [ours])的总体精度是最高的。可以粗略看到右下角的mAP值都比上面的要高。

训练和测试速度的提升
作者做了下表,展示了 Fast R-CNN 、R-CNN、SPPnet的训练、测试时长比较。3类不同大小的模型都进行了比较。
可以看到在S模型中,Fast R-CNN的训练速度比R-CNN快了18.3倍。
在L模型中,测试速度快了146倍;如果测试时使用前面提到的SVD技术,速度提升了213倍。同时精度是最高的。

这里作者就指出测试时使用了SVD会提速30%多,但精度只下降了0.3%。
并且SVD是个单独的trick,不需要进行事后的再fine tuning。fine-fune 卷积层的权重提升检测精度
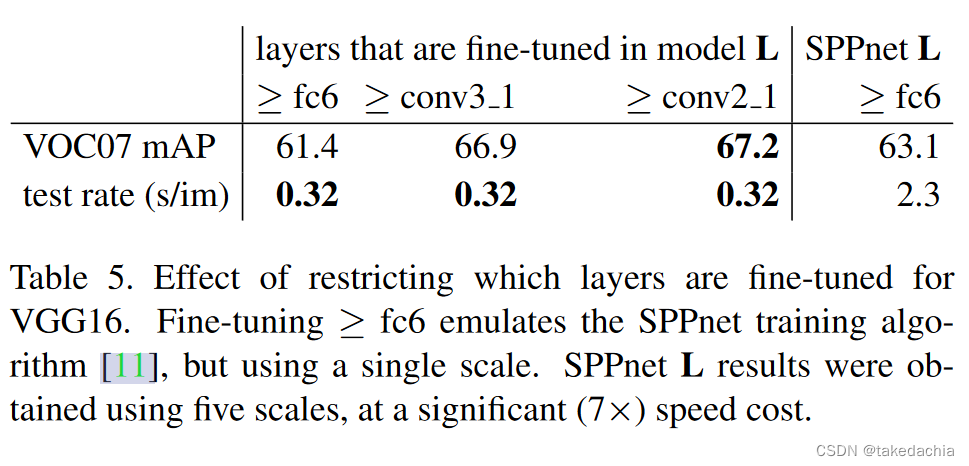
如前所述,SPPnet难以更新模型权重,所以当时SPPnet使用了冻结全连接层之前所有层权重的方法,以提高效率,并且准确率也还不错。
但作者认为,前面卷积层的参数也很重要,fine-tune卷积可提升模型精度。
于是作者用L模型做了冻结层参数的实验,证明了这个结论。下图显示,微调全连接层fc6的精度不如微调卷积层conv3_1、conv2_1的精度,微调的层越深,效果越好。
但是不是所有的卷积层都有必要被fine-tune呢?作者认为也不一定。
作者发现在更小的模型中(如S模型和M模型),微调第一个卷积层conv1对精度没什么影响,反而让模型训练效率下降(比如需要更大的GPU显存)。从第二个卷积层开始微调相对比较合适。实验结果2——验证Fast R-CNN设计的有效性
作者接着就Fast R-CNN模型本身的设计,做了一些实验论证其有效性。
我觉得这是非常值得学习的科研思路,不仅需要对一个新方法的结果和老方法进行对比论证,还需要对它的新的设计论证其科学性,更好地解释论证新方法的科学价值。多任务训练真的有用吗?
我们知道R-CNN和SPPnet使用了多任务训练的方法,对一个模型分别训练1个CNN模型用于提取特征、1个线性SVM分类器用于候选框图像分类、1个bbox回归器用于调整框的定位。
而Fast R-CNN设计了一个损失函数将多任务优化成了单任务,优化一个损失函数一步到位进行训练。这样降低了训练资源消耗,提升了效率。但是多任务训练是否真的提升了模型的精度呢?作者设计了实验,在Fast R-CNN模型上,人工将这3个任务(特征提取、分类、回归)各自分开、组合训练,进行对比。
下图左边依次是 多任务训练、单阶段训练、测试时使用bbox回归,打上勾的为训练测试的组合。
而第一列我用黑框框出来(即都没有打勾)的表示只使用图像分类(交叉熵损失)进行训练得到的结果。
实验结果用VOC07数据集上的mAP表示。
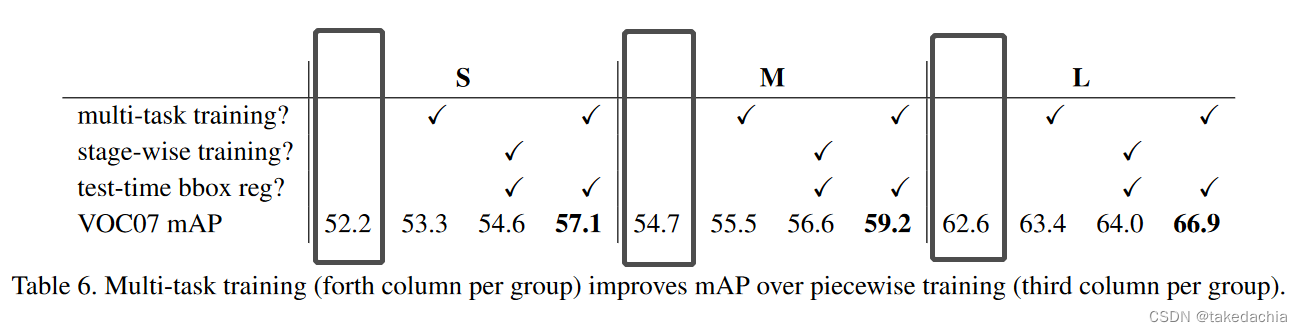
可以看到使用多任务训练+bbox回归是精度提升最高的。证明多任务训练是work的。关于尺度不变性
前面介绍了两种关于尺度不变性的目标检测策略。
作者做了实验来对比两种策略的结果,对比了两者的性能和精度差异。下图scales中:1表示单尺度策略(都缩放成600像素大小),5表示多尺度策略(有480、576、688、864、1200五种预设尺度)。
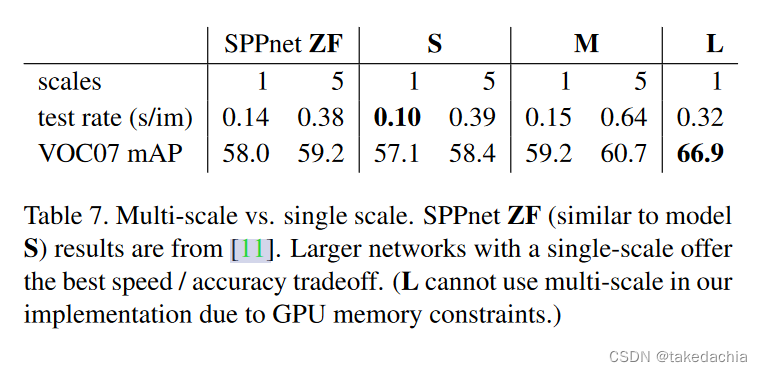
可看到多尺度策略下检测精度比单尺度高一点,但是单尺度检测速率比多尺度要快很多。
所以看上去单尺度性价比高,实际情况下需要进行取舍。是否需要更多的训练数据
作者看到传统的目标检测算法(如DPM,也是原作者自己的工作)有一个精度饱和(mAP saturate)的现象。
即训练数据到了一定程度后,模型的精度上不去了。
那么Fast R-CNN是否有这样的现象呢?作者做实验对VOC07数据集进行了扩充,将VOC2012扩充进训练集,发现精度上升(66.9% → 70.0%)。
因此,Fast R-CNN模型在训练数据增大的时候,模型的精度也提升,没有精度饱和现象,这是一个优秀的目标检测模型应有的特性。SVM分类器 vs softmax
我们知道R-CNN和SPPnet使用了SVM分类器对候选框进行图像分类。
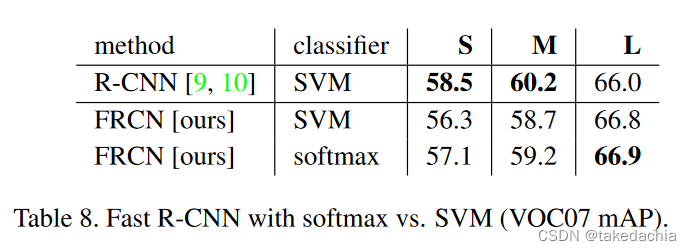
但Fast R-CNN设计成了softmax分类,这和整个模型的设计目的有关,为了进行多任务训练以及模型的fine-tuning。就分类效果上,SVM和softmax相比又如何呢?作者做了如下实验。
我们发现在Fast R-CNN中,softmax比SVM更有用。
并且虽然在小模型上R-CNN中的SVM精度高一点,但随着模型增大,softmax依然是最有用的那一个。
考虑到多任务训练的效率等因素,softmax是优于SVM的。
候选框越多越好吗?
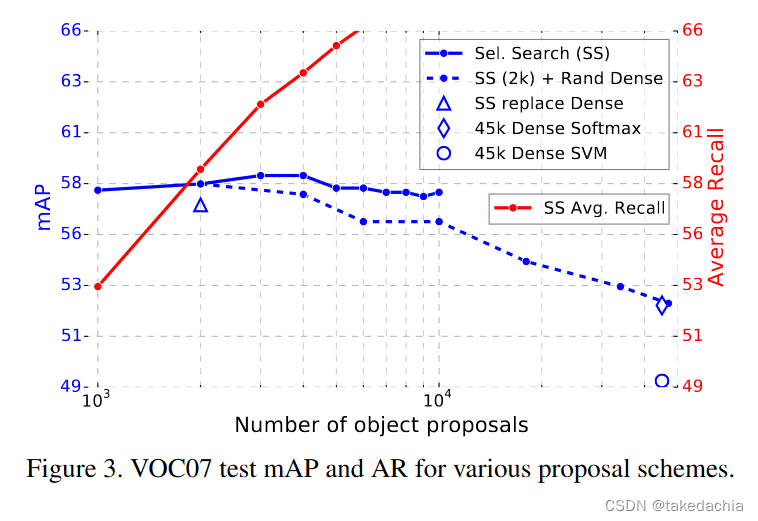
目前主要有两种框生成算法,一种是生成比较稀疏分布的selective search,一种是基于DPM的生成稠密候选框的算法。
简单看一下下面这张图,可看到使用了selective search(图中蓝色实线)随着候选框数量增多,精度也会发生波动,所以并不是候选框越多越好。
使用了selective search+随机生成稠密框的组合算法,随着框数量增加,精度大幅下降。
(完)
- 训练是是多阶段的。首先需要训练一个CNN网络用于图像特征的提取。
-
相关阅读:
APK大小缩小65%,内存减少70%:如何优化Android App
这应该是最全的Spring Boot启动原理源码剖析了
中原银行实时风控体系建设实践
【论文笔记】FCN全卷积网络
论文精读之 Google_v3,以及其相对于 Google_v1 和 Google_v2_BN 的模型比较
文件包含漏洞学习小结
Tableau:商业智能(BI)工具
linux线程创建等待及退出总结
网申线上测评,要不要找人代做在线测评?
如何安装Jmeter监控服务器资源插件(JMeterPlugins + ServerAgent 方法二)?
- 原文地址:https://blog.csdn.net/takedachia/article/details/126385692