-
【OpenCV】-图像的矩
为什么学图像的矩?
答:矩函数在图像分析中涉及很多地方,如模式识别、目标分类、目标识别与方位估计、图像编码与重构。一个从一幅数字图形中计算出来的矩集,通常描述了该图像的全局特征,并提供了大量的关于该图像不同类型的几何特性信息。比如大小、位置、方向以及形状等。
1、矩的计算:moments()函数
说明:moments()函数用于计算多边形和光栅形状的最高达三阶的所有矩。矩用来计算形状的重心、面积,主轴和其他形状。
Moments moments(InputArray array,bool binaryImage=false)- 1
-
第一个参数:输入参数,可以是光栅图像(单通道,8位或者浮点的二维数组)
补充:光栅图也叫做位图、点阵图、像素图,简单的说,就是最小单位由像素构成的图,只有点的信息,缩放时会失真。每个像素有自己的颜色,类似电脑里的图片都是像素图,你把它放很大就会看到点变成小色块了。
-
第二个参数:默认值false,若参数为true,则所有非零像素为1。是否为二值图像
2、计算轮廓面积:contourArea()函数
说明:contourArea()函数计算整个轮廓或者部分轮廓的面积
double contourArea(InputArray contour,bool oriented=false)- 1
- 第一个参数:输入的向量,二维点(轮廓顶点),Mat类型或者std::vector
- 第二个参数:面向区域标识符。若其为true,该函数返回一个带符号的面积值,其正负取决于轮廓的方向(顺时针还是逆时针)。false表示以绝对值返回,不带符合
3、计算轮廓长度:arcLength()函数
说明:arcLength()函数用于计算封闭轮廓的周长或曲线的长度
double arcLength(InputArray curve,bool closed)- 1
-
第一个参数:输入的二维点集,可以是Mat或者std::vector
-
第二个参数:一个用于指示曲线是否封闭的标识符,默认值closed,标识曲线封闭
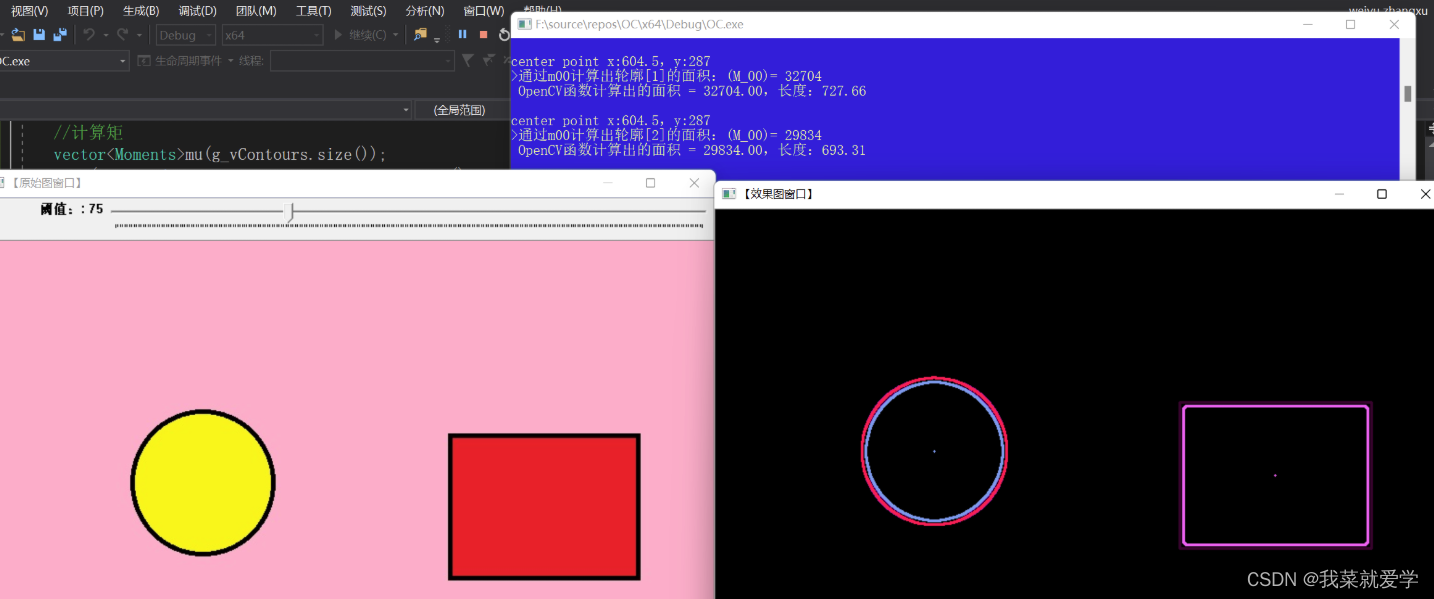
4、综合示例程序:查找和绘制图像轮廓矩
代码步骤:
- 提前图像轮廓
- 发现轮廓
- 计算每个图像轮廓的矩
- 计算每个对象的中心、弧长、面积
#include#include #include #include using namespace std; using namespace cv; #define WINDOW_NAME1 "【原始图窗口】" #define WINDOW_NAME2 "【效果图窗口】" Mat g_srcImage; Mat g_grayImage; int g_nThresh = 100; //阈值 int g_maxThresh = 255; //阈值最大值 RNG g_rng(12345); //随机数生成器 Mat g_cannuMat_output; vector<vector<Point> > g_vContours; vector<Vec4i> g_vHierarchy; void on_ThreshChange(int, void *); static void ShowHelpTxte(); int main() { system("color 1E"); //加载源图像 g_srcImage = imread("E:\\Pec\\jun.jpg", 1); //得到的原图转换为灰度并进行平滑 cvtColor(g_srcImage, g_grayImage, COLOR_BGR2GRAY); blur(g_grayImage, g_grayImage, Size(3, 3)); namedWindow(WINDOW_NAME1, WINDOW_AUTOSIZE); imshow(WINDOW_NAME1, g_srcImage); createTrackbar("阈值:", WINDOW_NAME1, &g_nThresh, g_maxThresh, on_ThreshChange); on_ThreshChange(0, 0);//调用一次进行初始化 waitKey(0); return 0; } void on_ThreshChange(int, void *) { //使用边缘检测 Canny(g_grayImage, g_cannuMat_output, g_nThresh, g_nThresh * 2, 3,false); //找到轮廓 findContours(g_cannuMat_output, g_vContours, g_vHierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0)); //计算矩 vector<Moments>mu(g_vContours.size()); for (unsigned int i = 0; i < g_vContours.size(); i++) { mu[i] = moments(g_vContours[i], false); } //计算中心矩 vector<Point2f>mc(g_vContours.size()); for (unsigned int i = 0; i < g_vContours.size(); i++) { //m00:表示:x=0,y=0 mc[i] = Point2f(static_cast<float>(mu[i].m10 / mu[i].m00), static_cast<float>(mu[i].m01 / mu[i].m00)); } //绘制轮廓 Mat drawing= Mat::zeros(g_cannuMat_output.size(), CV_8UC3); //通过m00计算轮廓面积并且和OpenCV函数比较 for (unsigned int i = 0; i < g_vContours.size(); i++) { cout << "center point x:" << mc[i].x << ",y:" << mc[i].y << endl; cout << ">通过m00计算出轮廓[" << i << "]的面积:(M_00= " << mu[i].m00 << " ,OpenCV函数计算出的面积 = " << contourArea(g_vContours[i]) << ",长度为:" << arcLength(g_vContours[i], true) << endl; Scalar color = Scalar(g_rng.uniform(0, 255), g_rng.uniform(0, 255), g_rng.uniform(0, 255)); drawContours(drawing, g_vContours, i, color, 2, 8, g_vHierarchy, 0, Point()); circle(drawing, mc[i], 1, color, -1, 8, 0);//绘制圆 } namedWindow(WINDOW_NAME2, WINDOW_AUTOSIZE); imshow(WINDOW_NAME2, drawing); } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
-
相关阅读:
安装黑苹果常见问题总结
七、SSM 框架整合
orb-slam2 从单目开始的简单学习(7):Optimizer
<七>深入理解new和delete的原理
BGP社团属性实验
Python pytorch tensorflow可视化工具Visdom使用教程--堪比TensorboardX
手写Ribbon基本原理
群晖下 gitea+drone+harbor实现CI/CD 发布到云服务器
Pandas筛选DataFrame数据:获取指定行范围和列范围的数据内容
课后习题【操作系统】
- 原文地址:https://blog.csdn.net/qq_44859533/article/details/126368789
