-
【相机坐标系、ORB_SLAM2坐标系】


d455 相机坐标系 ,也就是图像坐标系

tf::createQuaternionMsgFromRollPitchYaw(0*M_PI/180, 0, 0);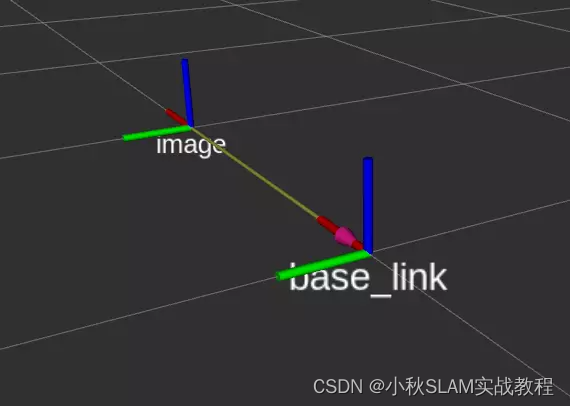
机器人坐标系 符合右手坐标系 红前x 绿左y 蓝上z
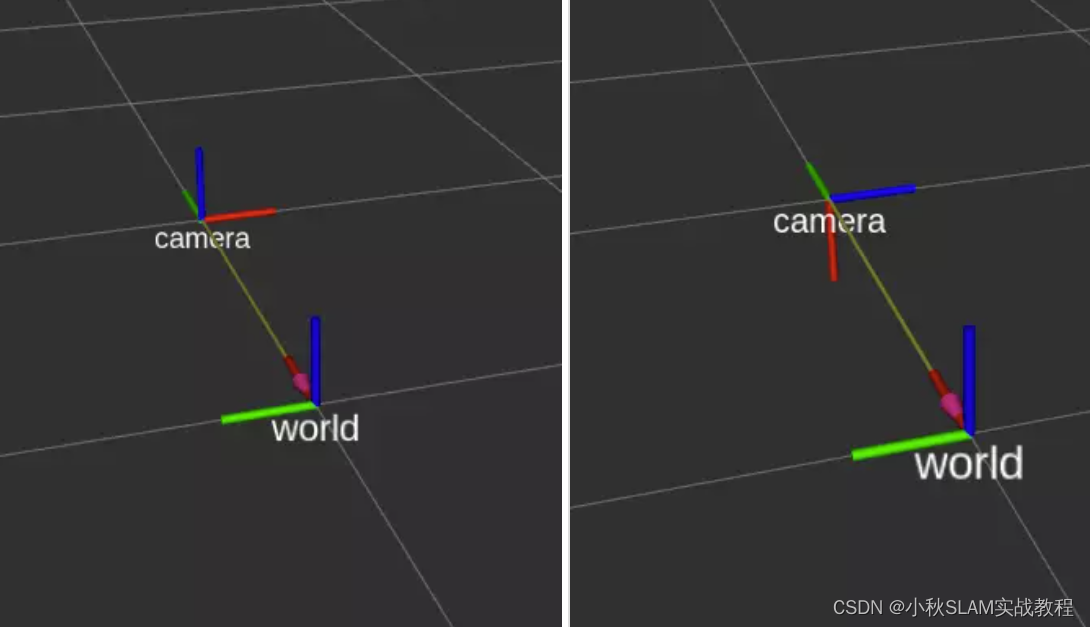
q.setRPY(0, M_PI/2, -M_PI/2); // -0 90 -90 先绕z轴负90度 再绕y轴正90度
-
相关阅读:
CMake学习教程(一)
什么情况下考虑分库分表
Python编程基础:实验3——字典及集合的使用
迪文TPS04电容触摸屏驱动IC溅水触摸测试成功
Docker(一)、linux环境安装Docker
JAVA-信息录入
hdlbits系列verilog解答(always块casez语句)-35
反转链表-就地逆置法
研究人员在宜家智能照明系统发现漏洞,攻击者可以利用这些漏洞导致灯泡闪烁恢复出厂设置
源码安装python
- 原文地址:https://blog.csdn.net/qq_21950671/article/details/126316640