-
图(最小生成树、最短路径、关键路径)
6.1-1 图的基本概念
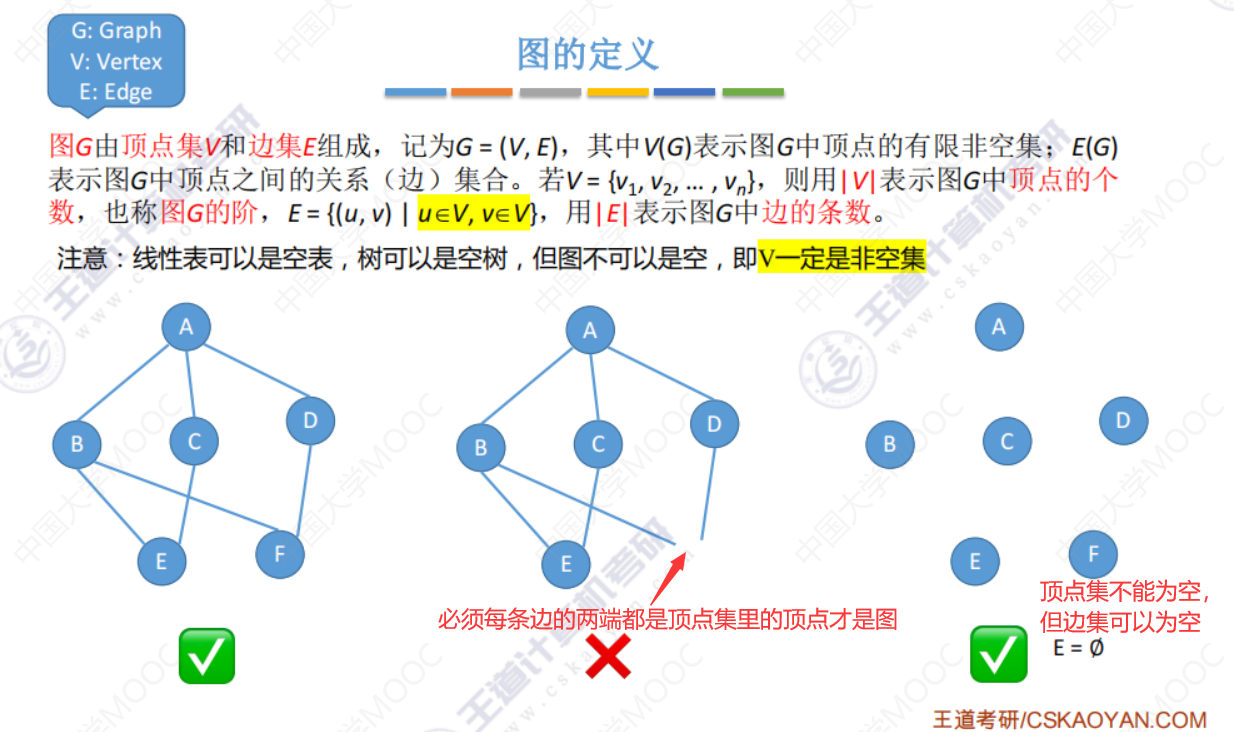
图的定义
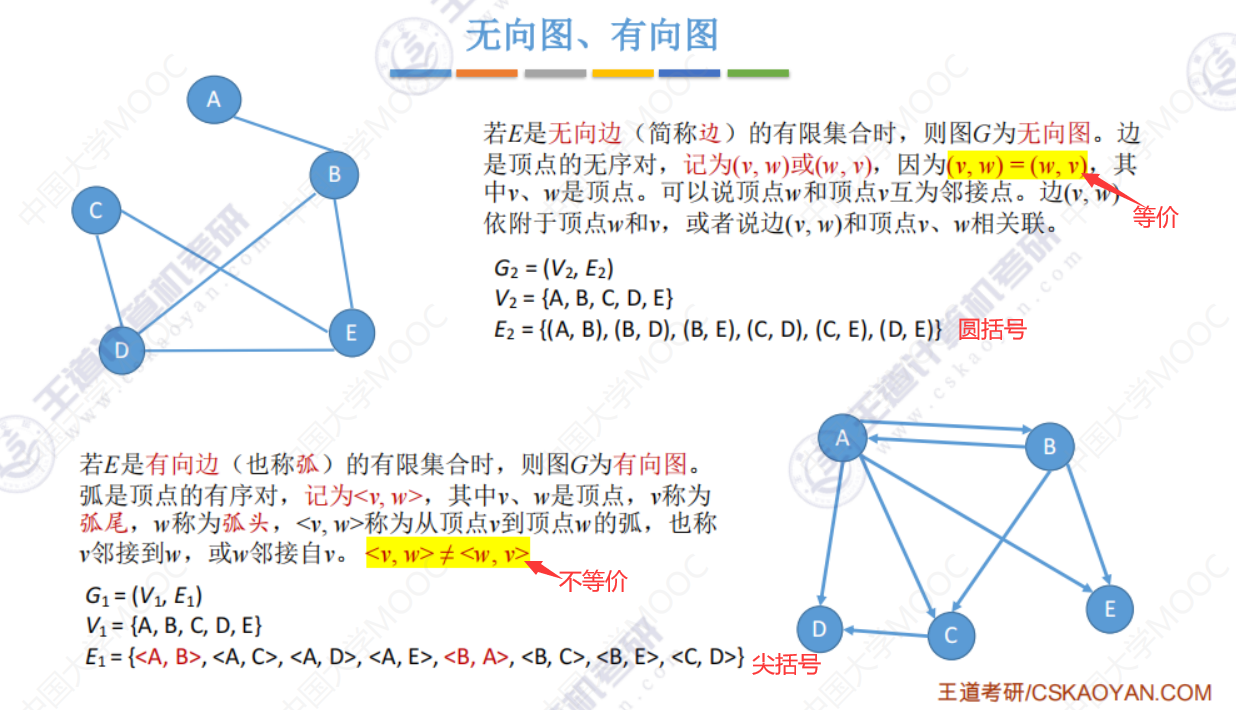
有向图、无向图
没有箭头的那一段是弧尾,有箭头的那一段叫弧头。AE中A是弧尾,E是弧头。
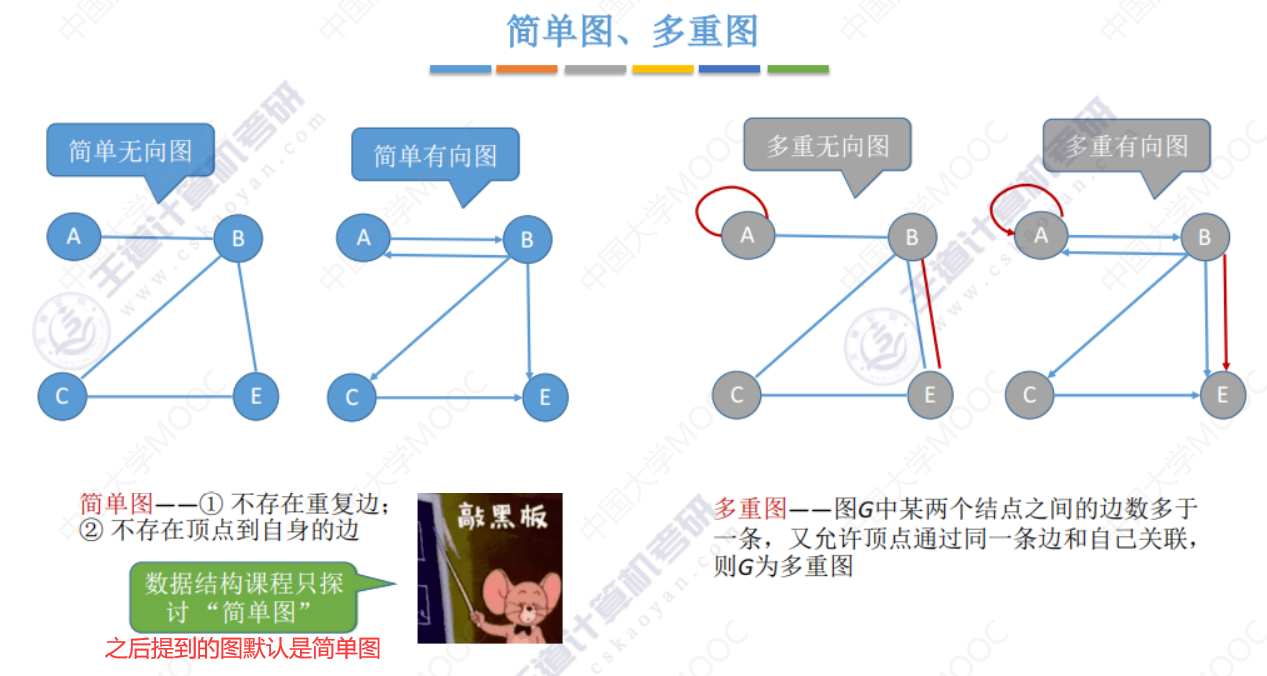
简单图、多重图
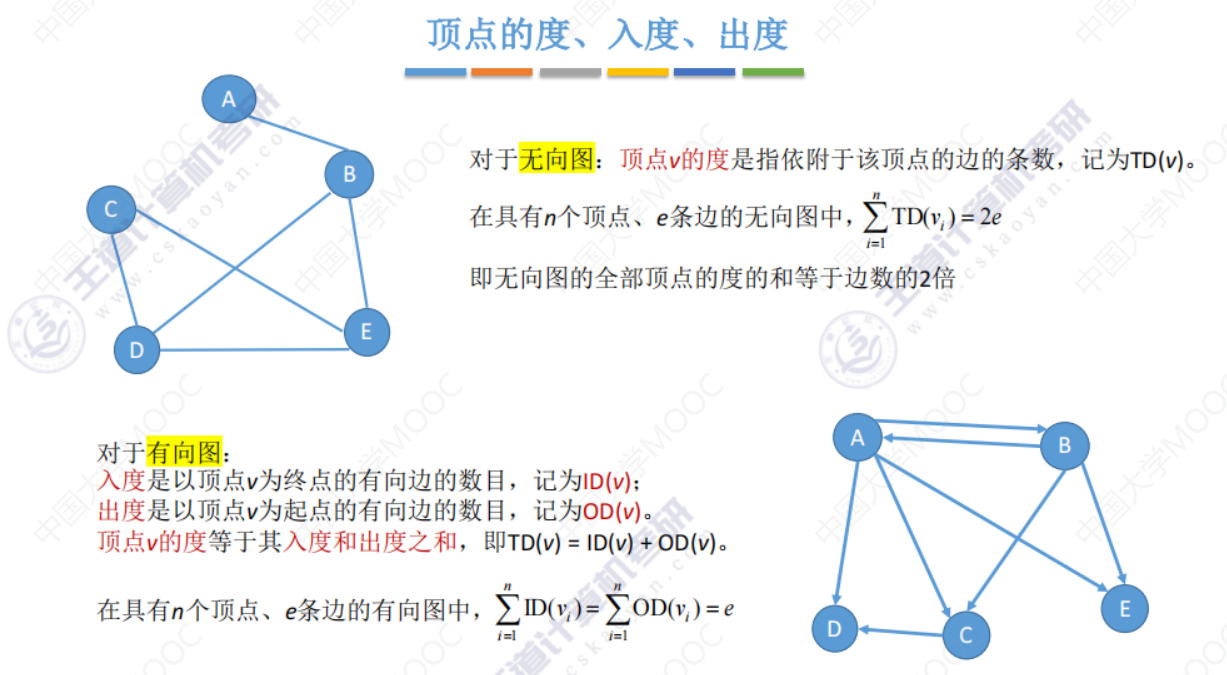
顶点的度、入度、出度
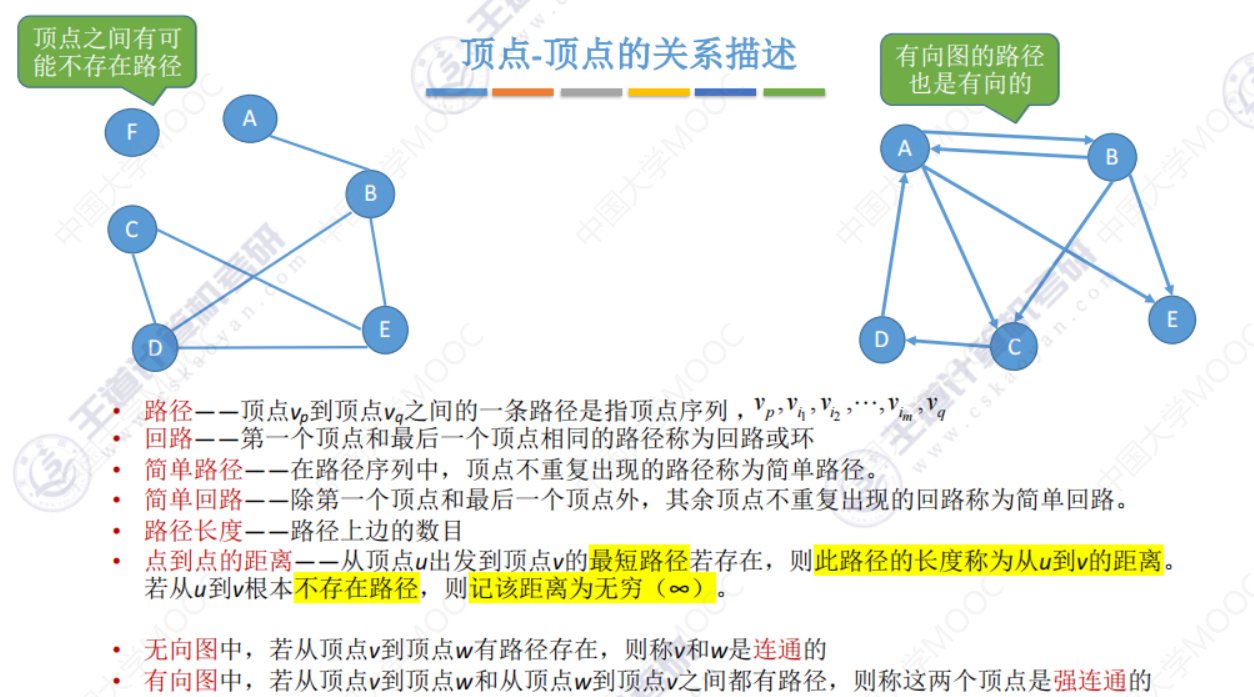
顶点-顶点的关系描述
强连通就是正反都有路径,A和B是强联通的,A和E就不是强连通的
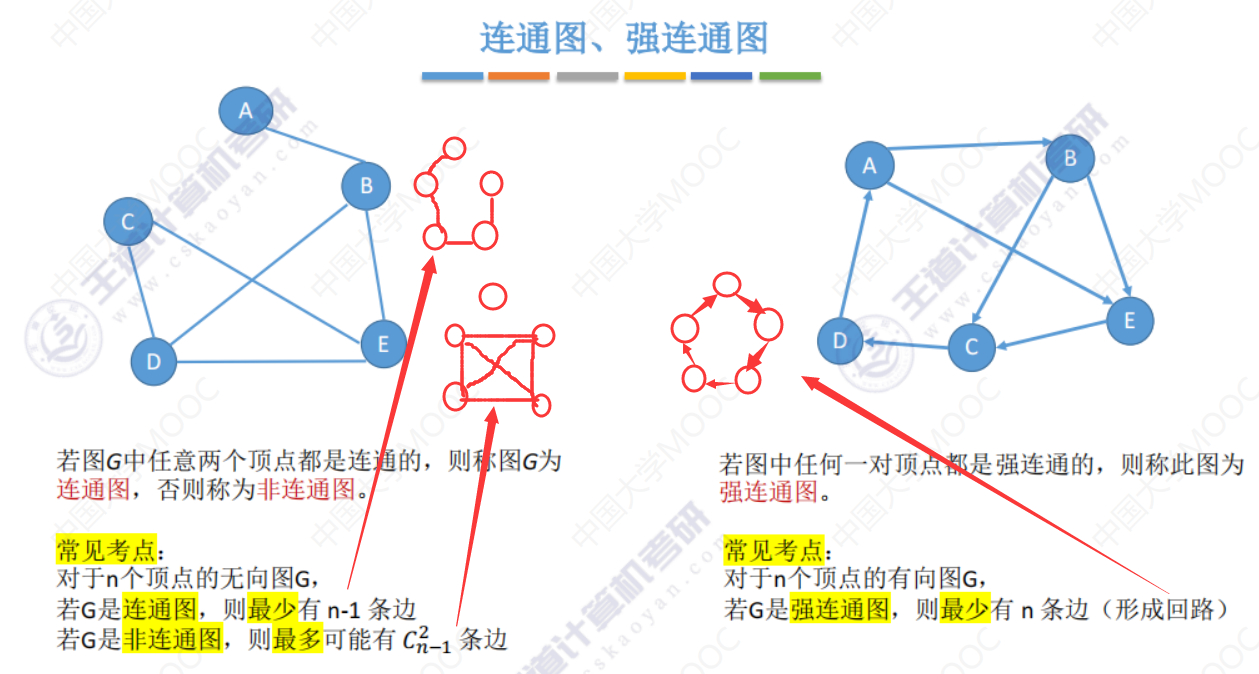
连通图、强连通图
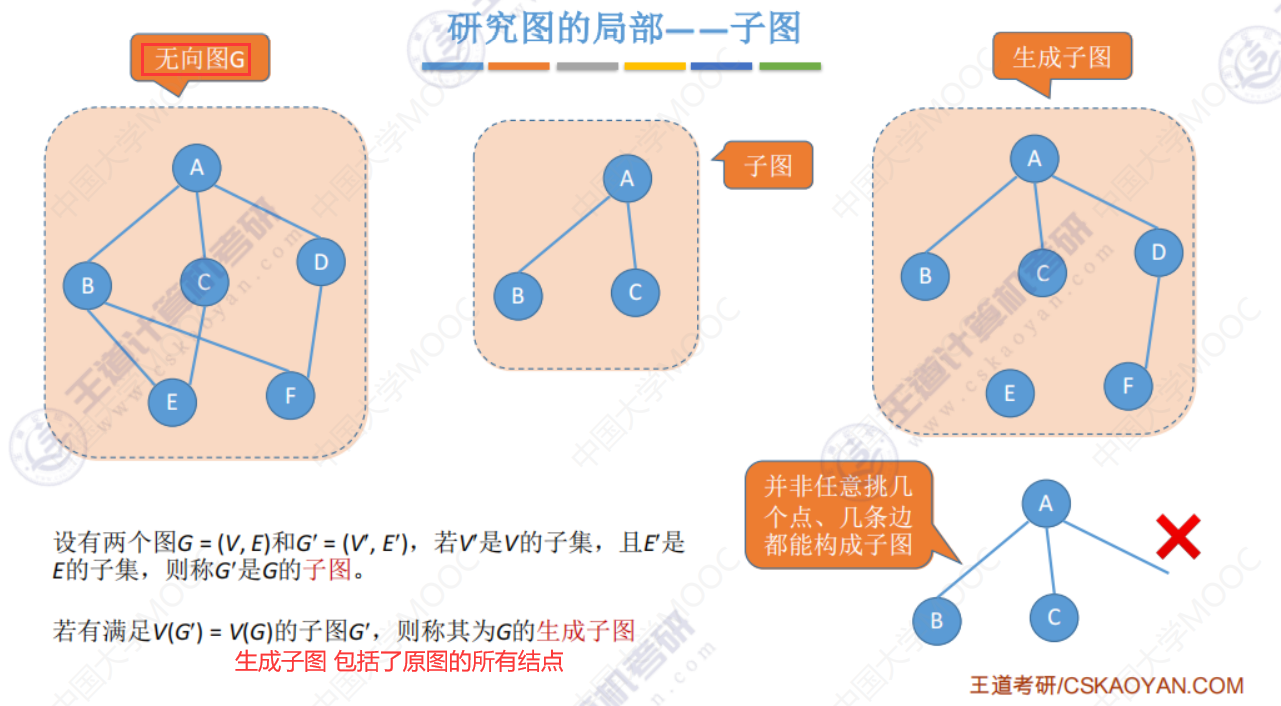
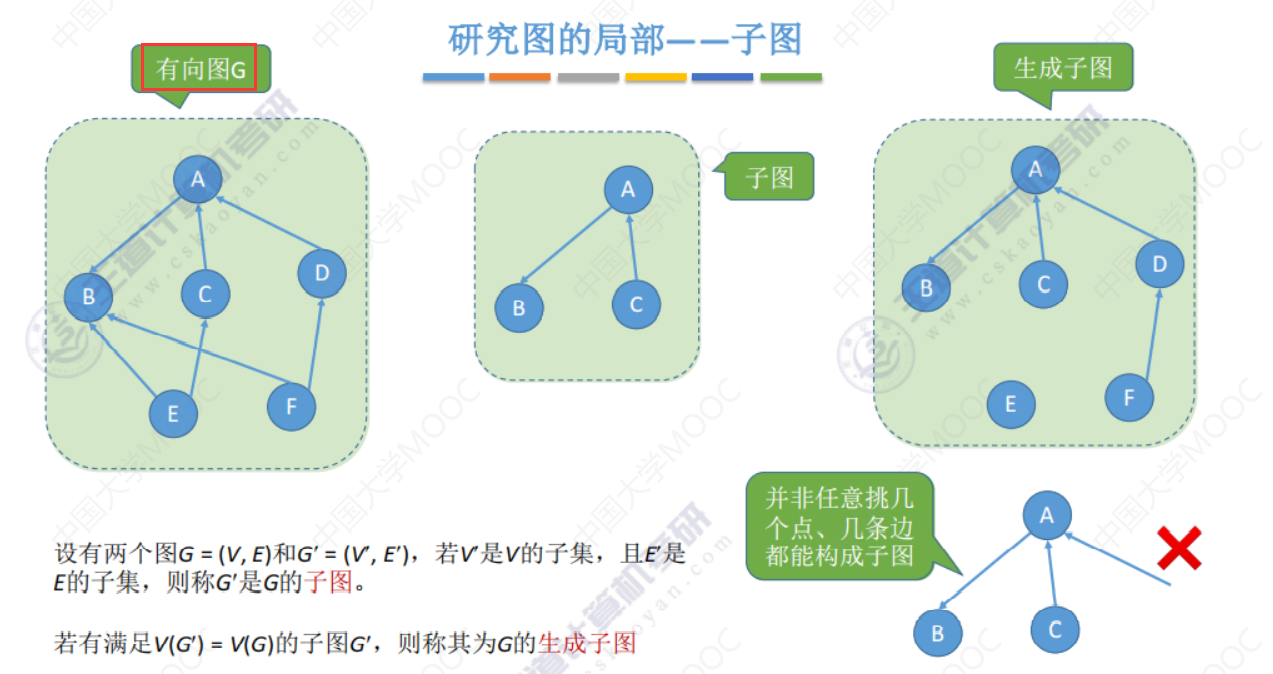
子图
无向图
有向图(和上面无向图的定义相同)
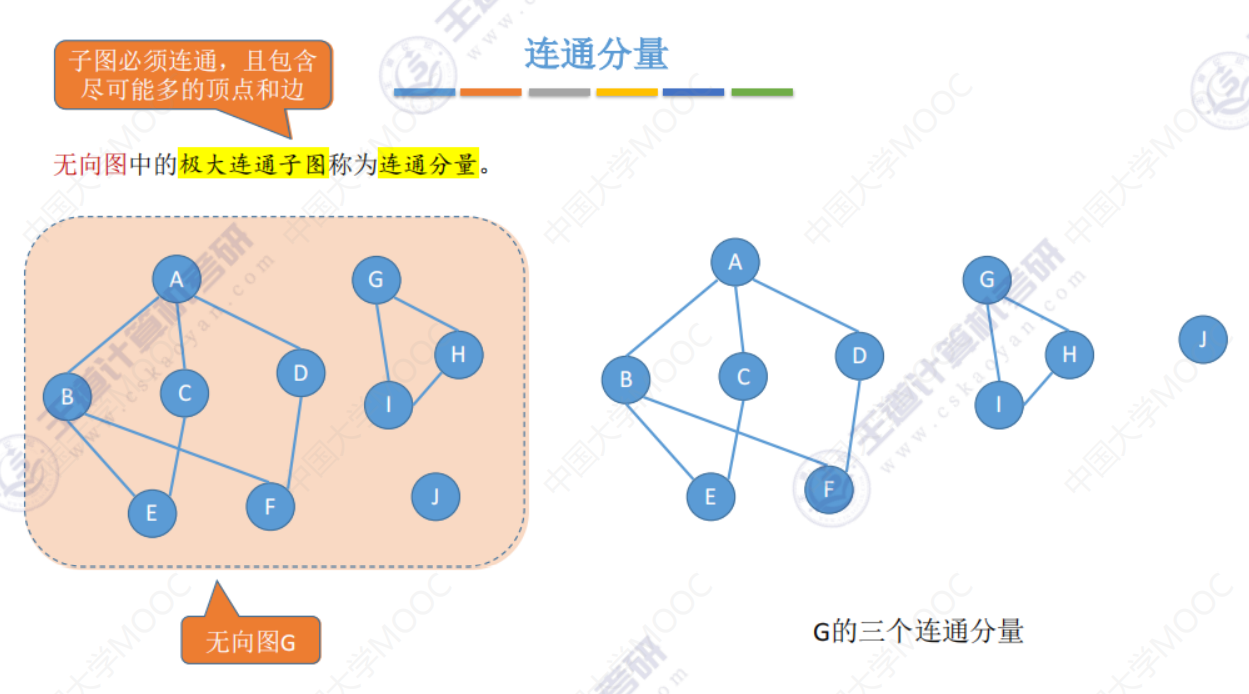
连通分量(描述无向图的)
极大连通子图是子图,且连通,且包含尽可能多的顶点和边
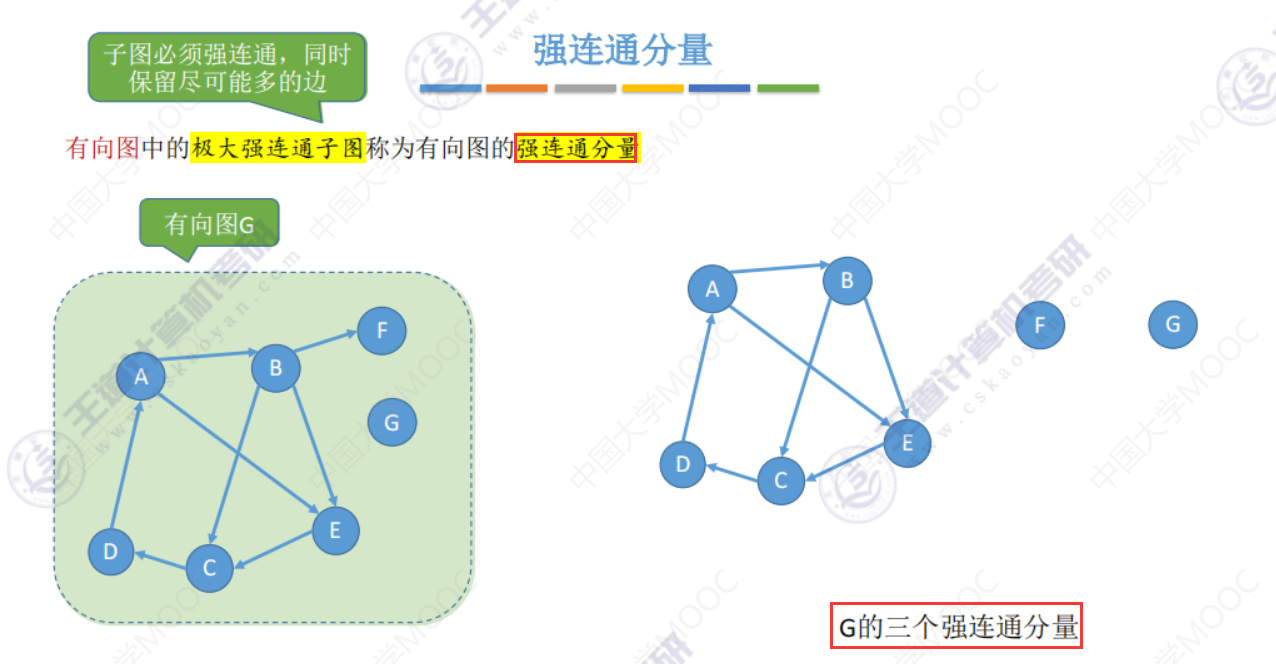
强连通分量(描述有向图的)
有向图中的 极大强连通子图 称为有向图的 强连通分量(极大强连通子图是强连通分量)
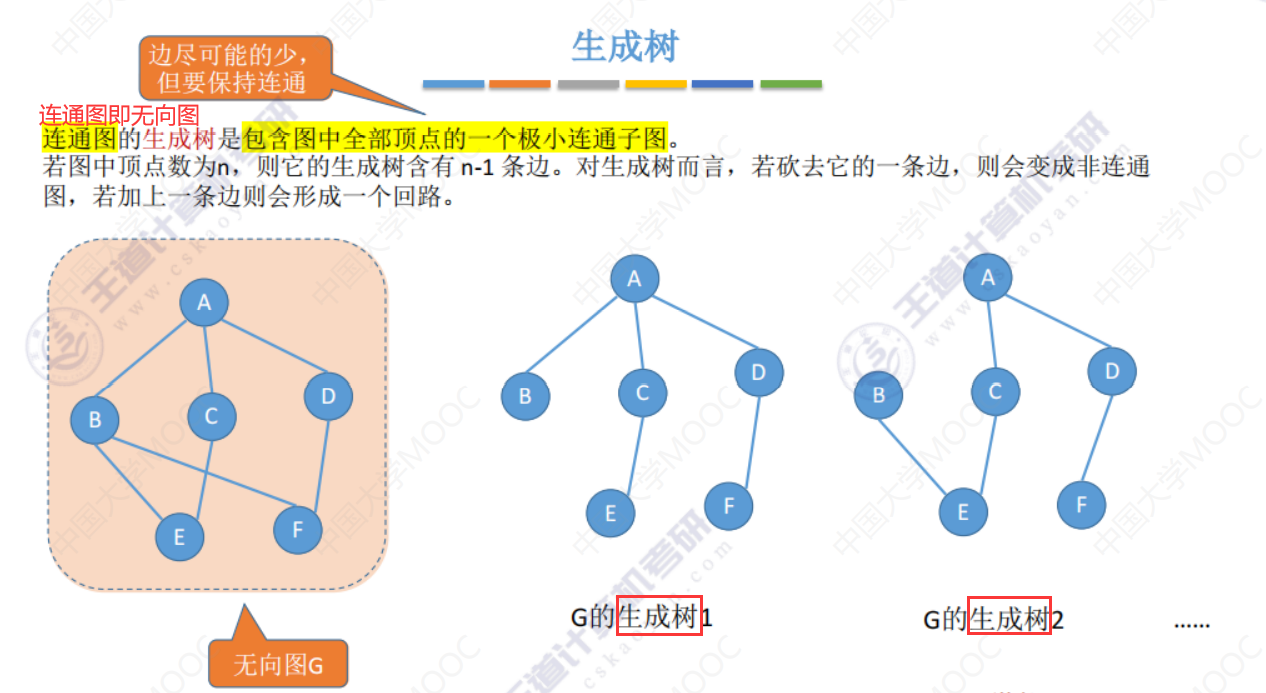
生成树
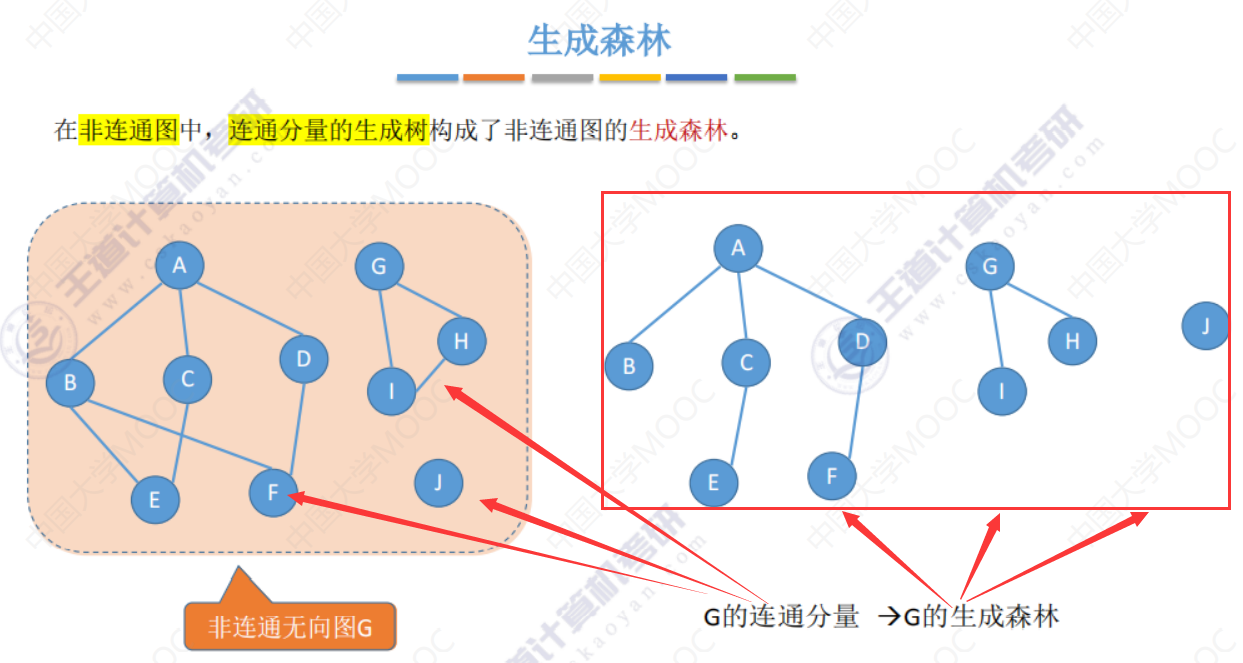
生成森林
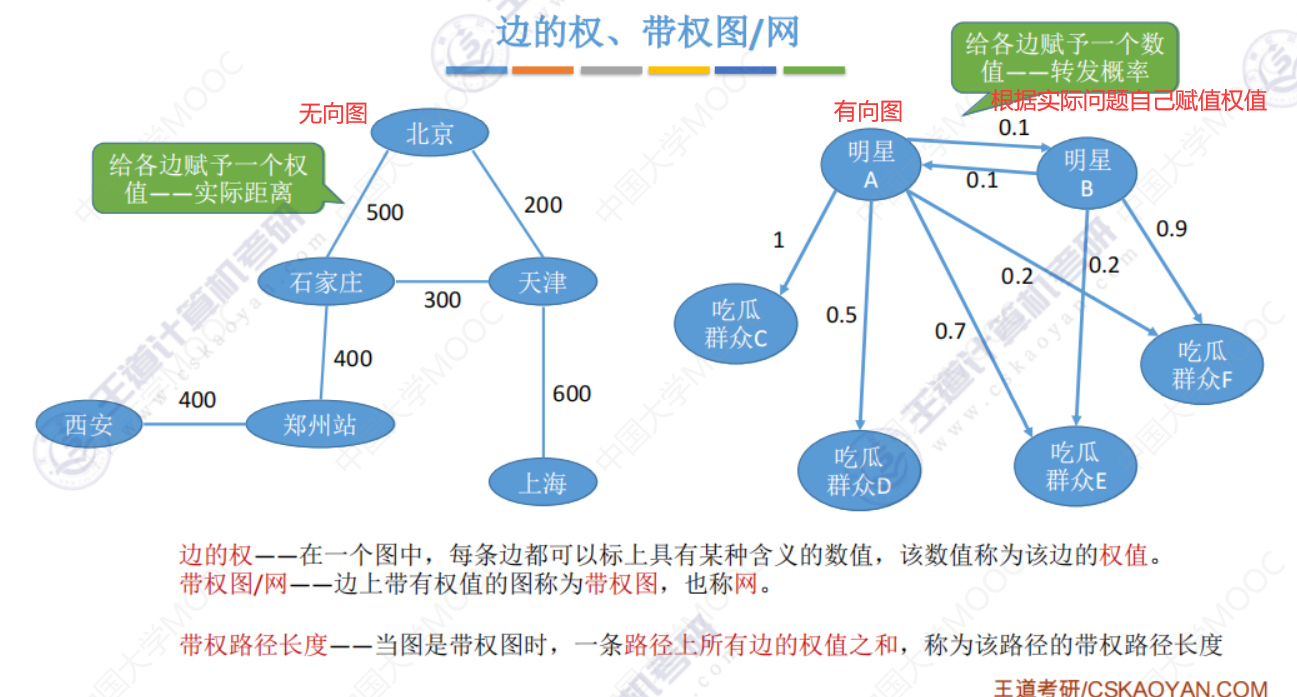
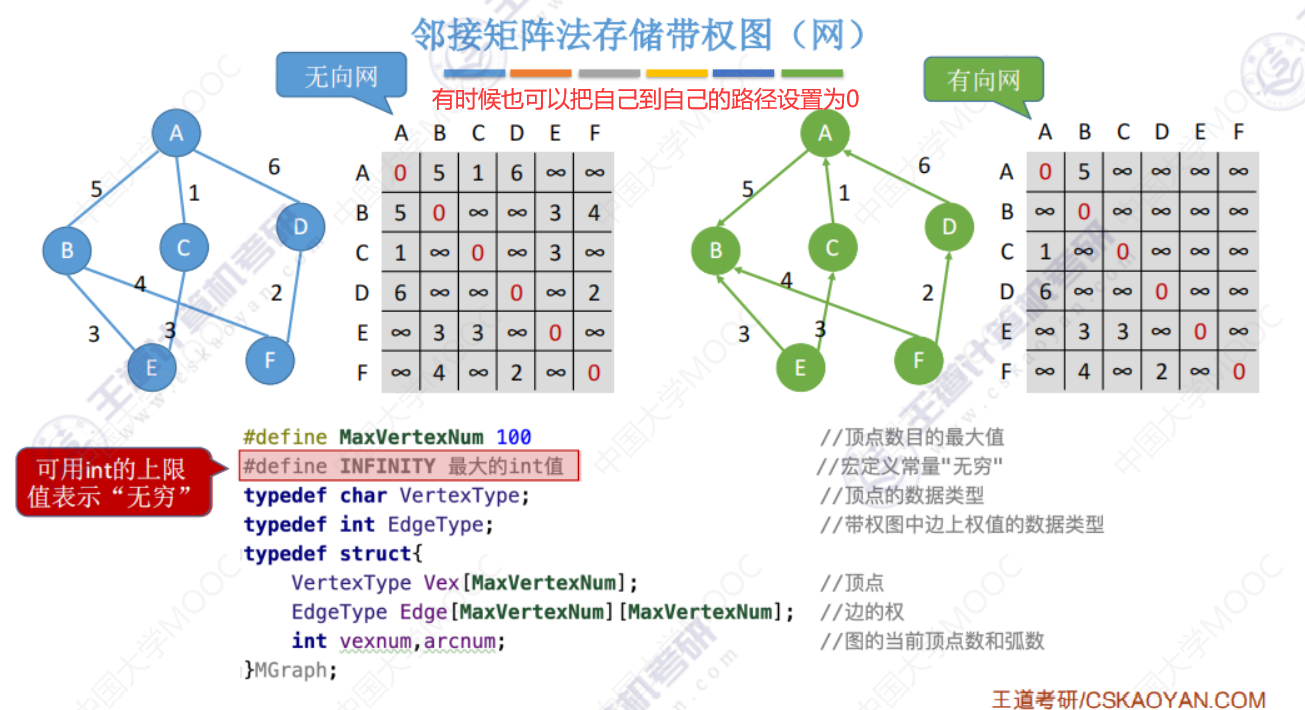
边的权、带权图/网
北京到上海的带权路径长度是200+600=800
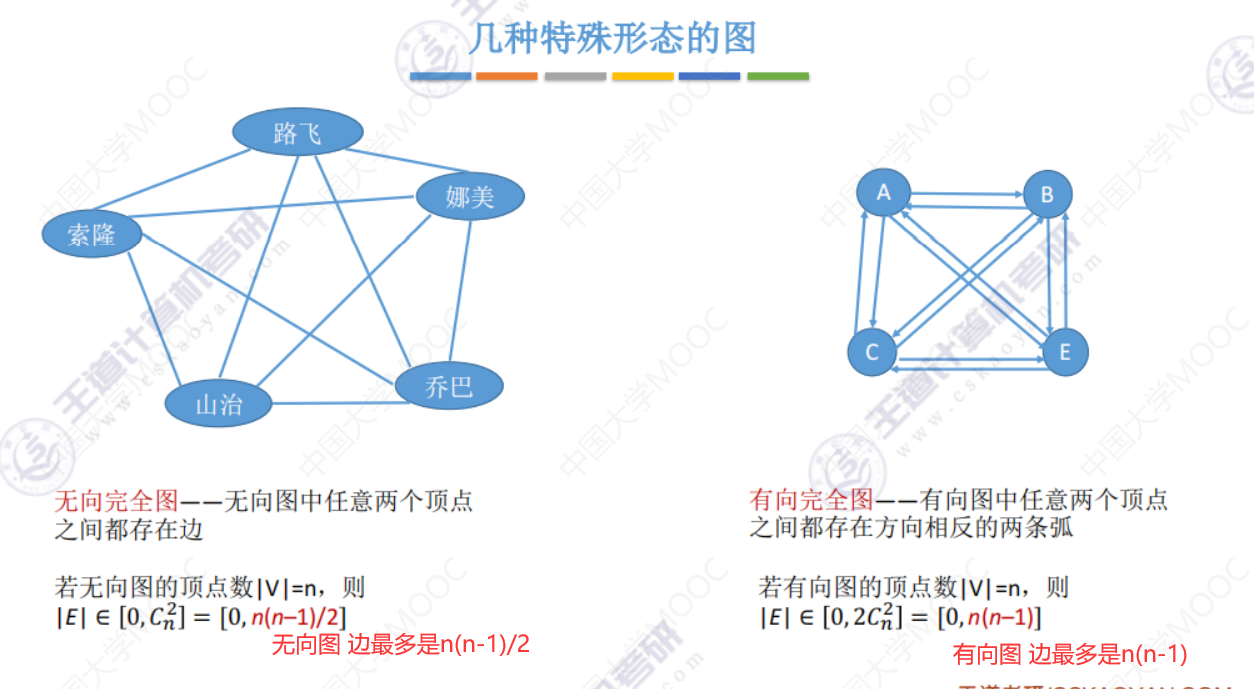
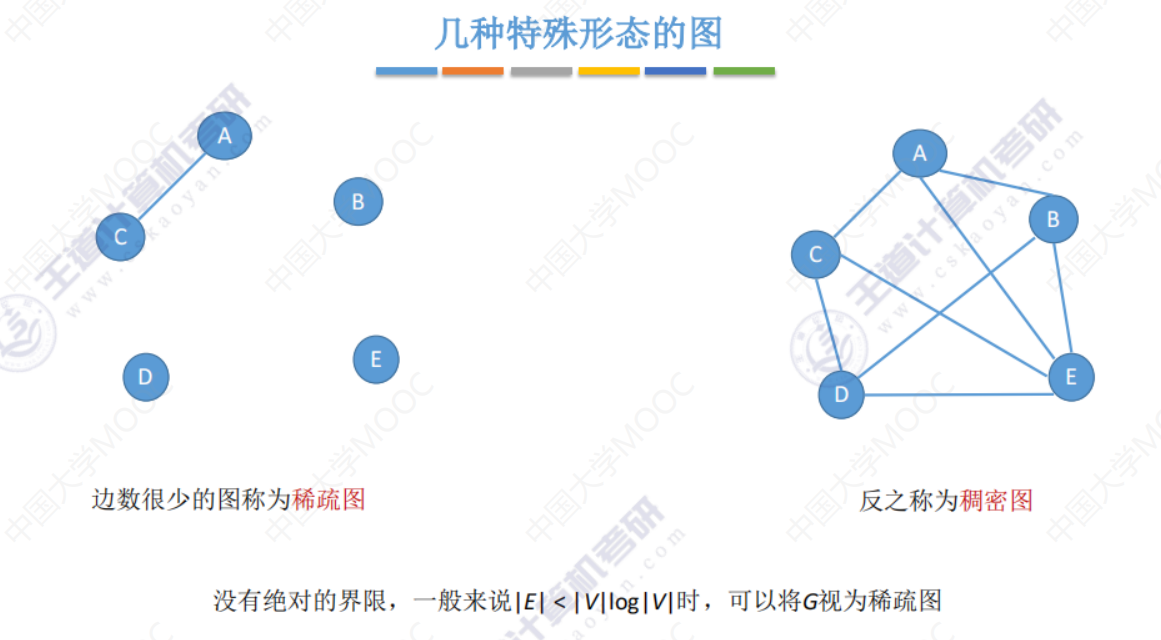
几种特殊形态的图
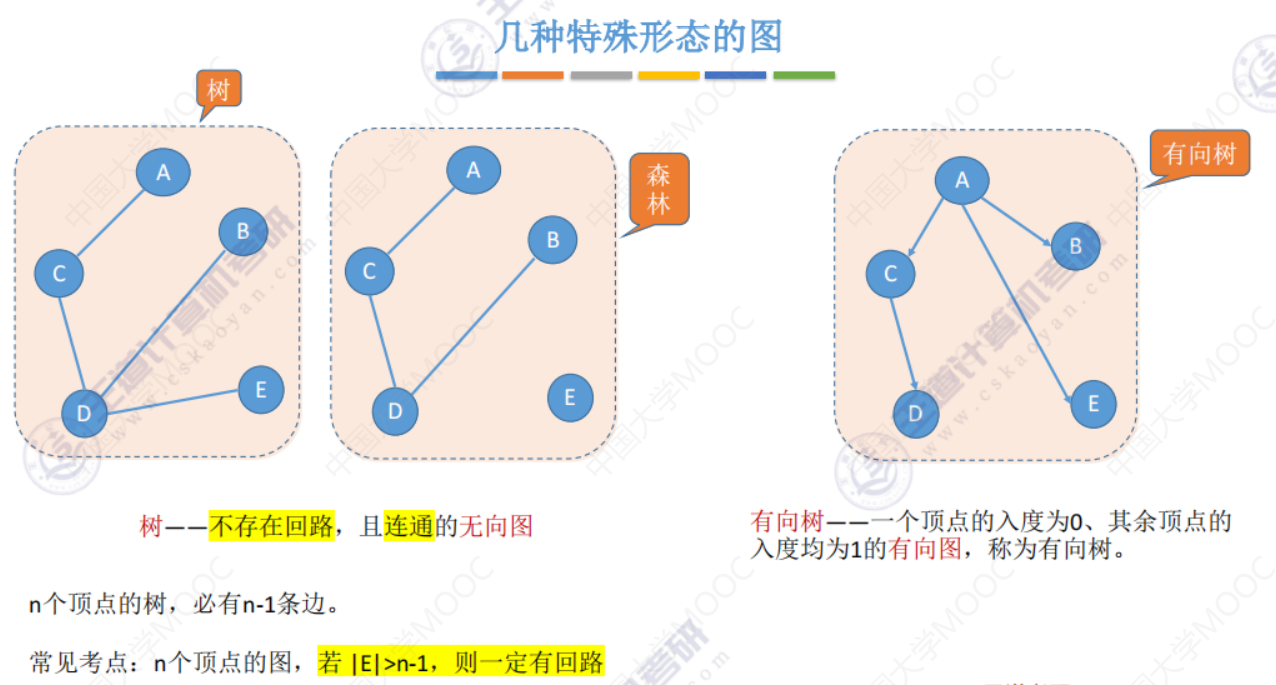
n个顶点的连通图最少有n-1条边,如果在多一条边,一定有回路。6.2-1 邻接矩阵法(数组实现的顺序存储,空间复杂度高,不适合存储稀疏图)
0表示不连接,1表示连接。
Vex数组中存储A,B,C,D,E,F,
然后在Edge中对应数组下标0,1,2,3,4,5,
这样我们表示AB这条边 就可以用Edge[0][1]=1来表示了。
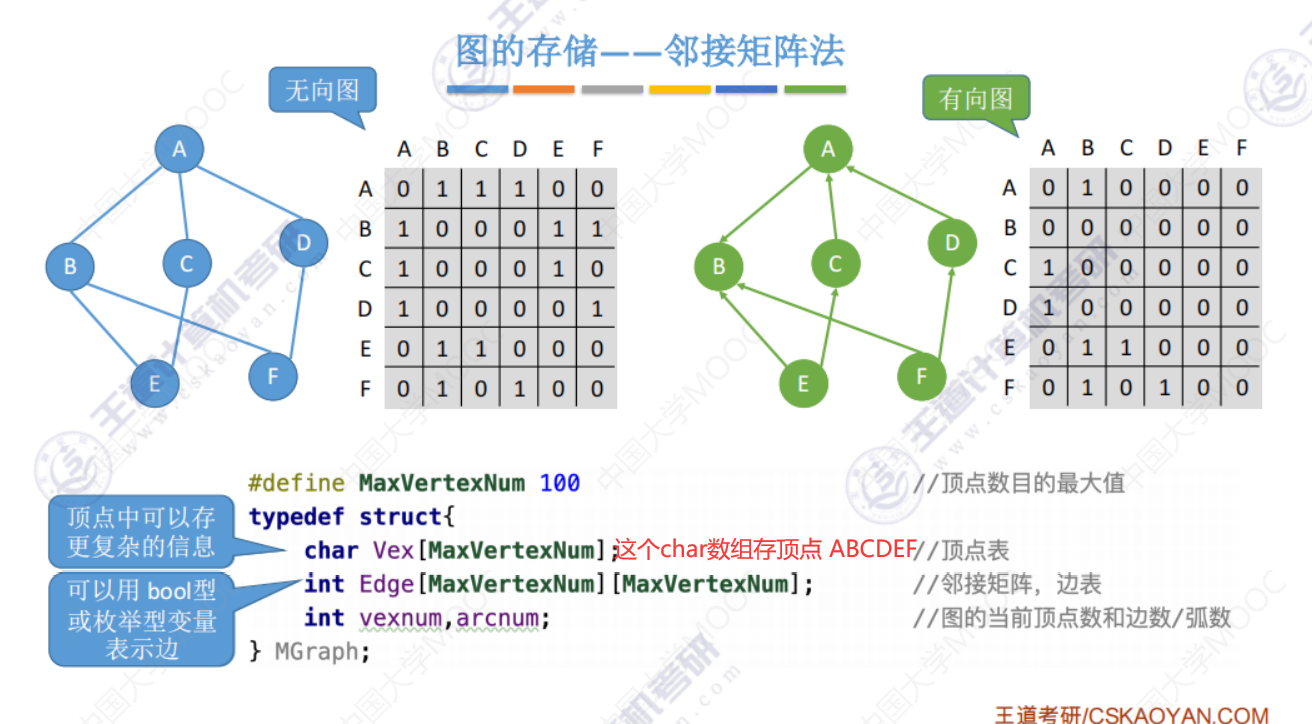
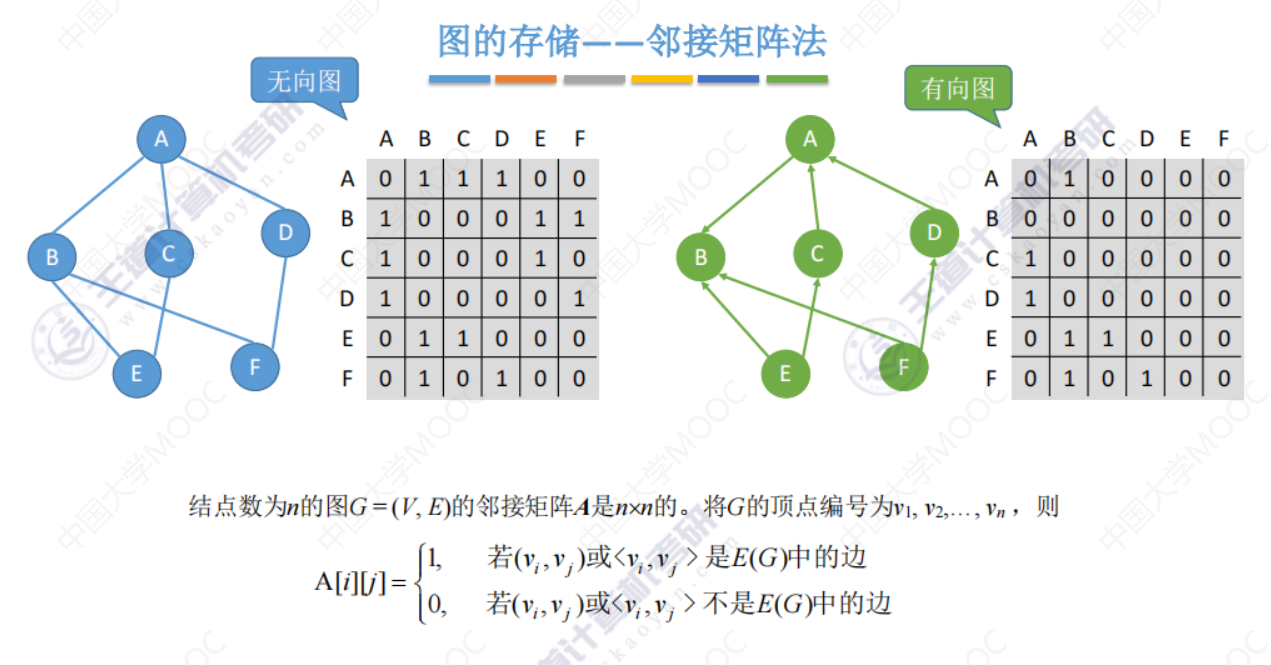
因为Edge数组中只存0、1,且bool类型只占1个字节,比int类型占4个字节 占用的空间少,所以可以考虑使用bool类型表示边。邻接矩阵存储 不带权 的图
下图中的(vi,vj)中的v是上图中的char型名为Vex的数组。
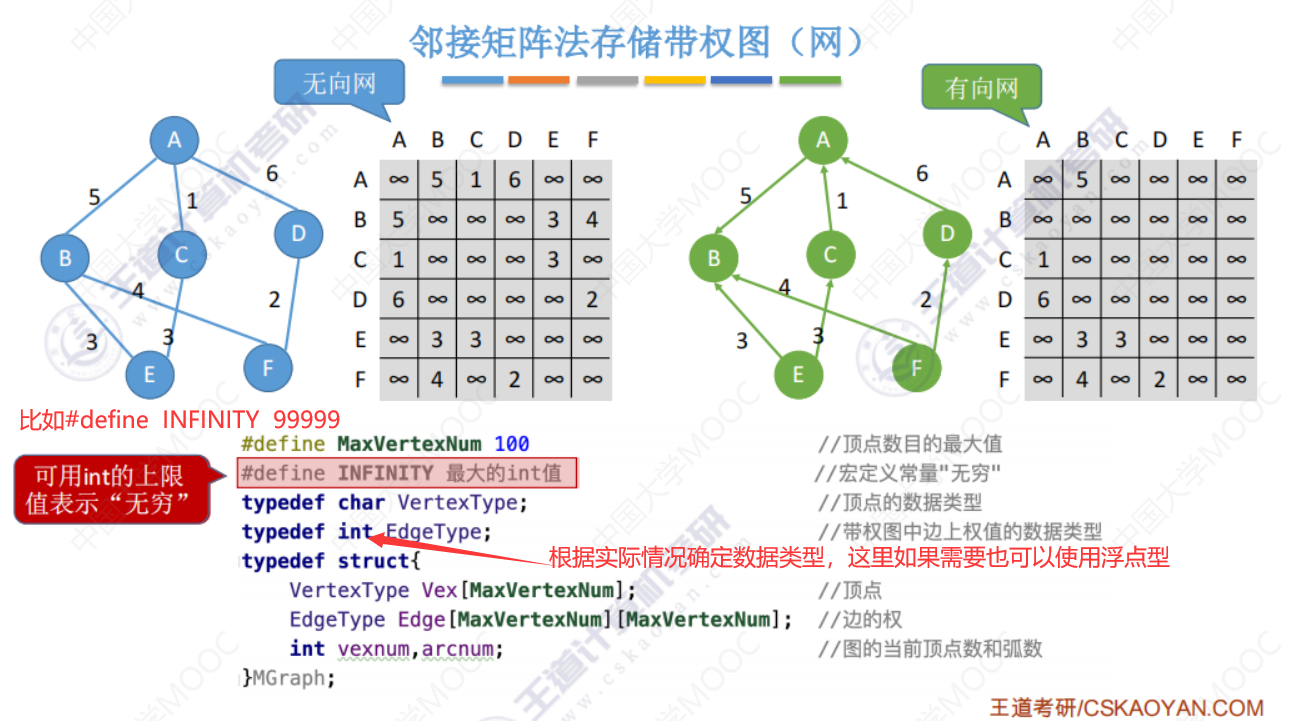
邻接矩阵存储 带权 图
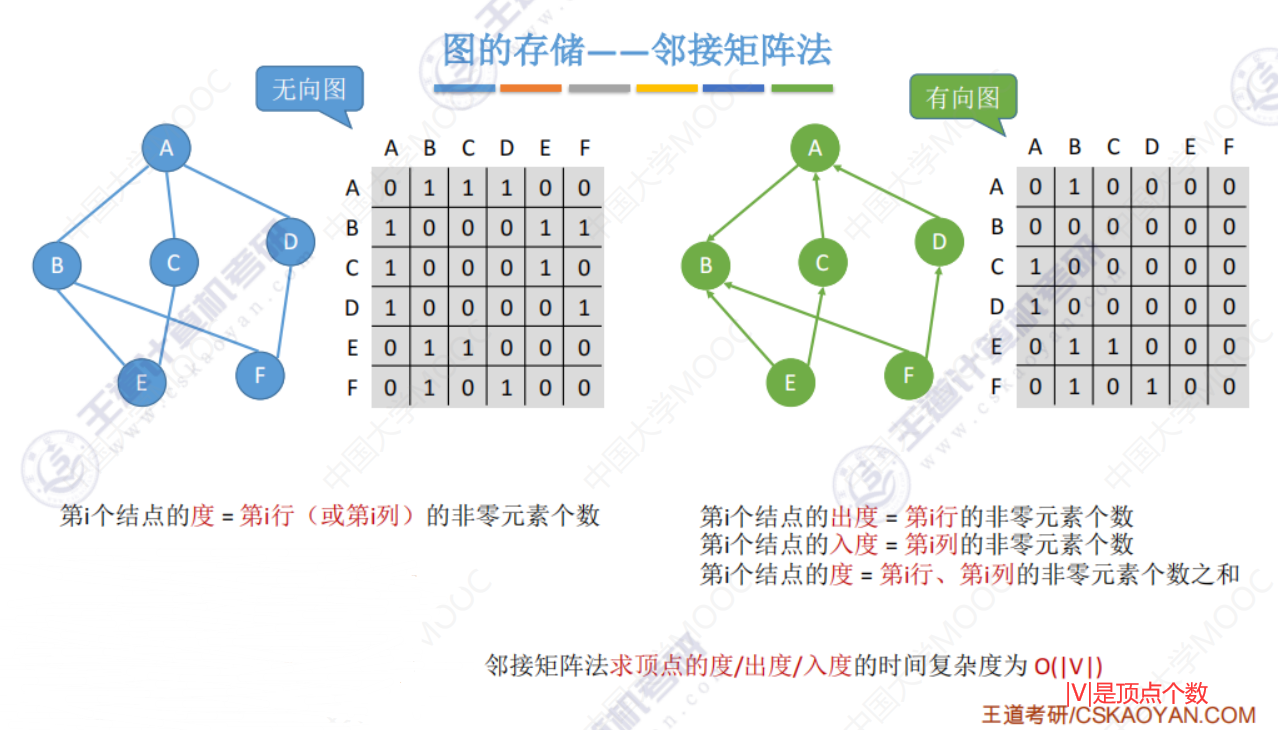
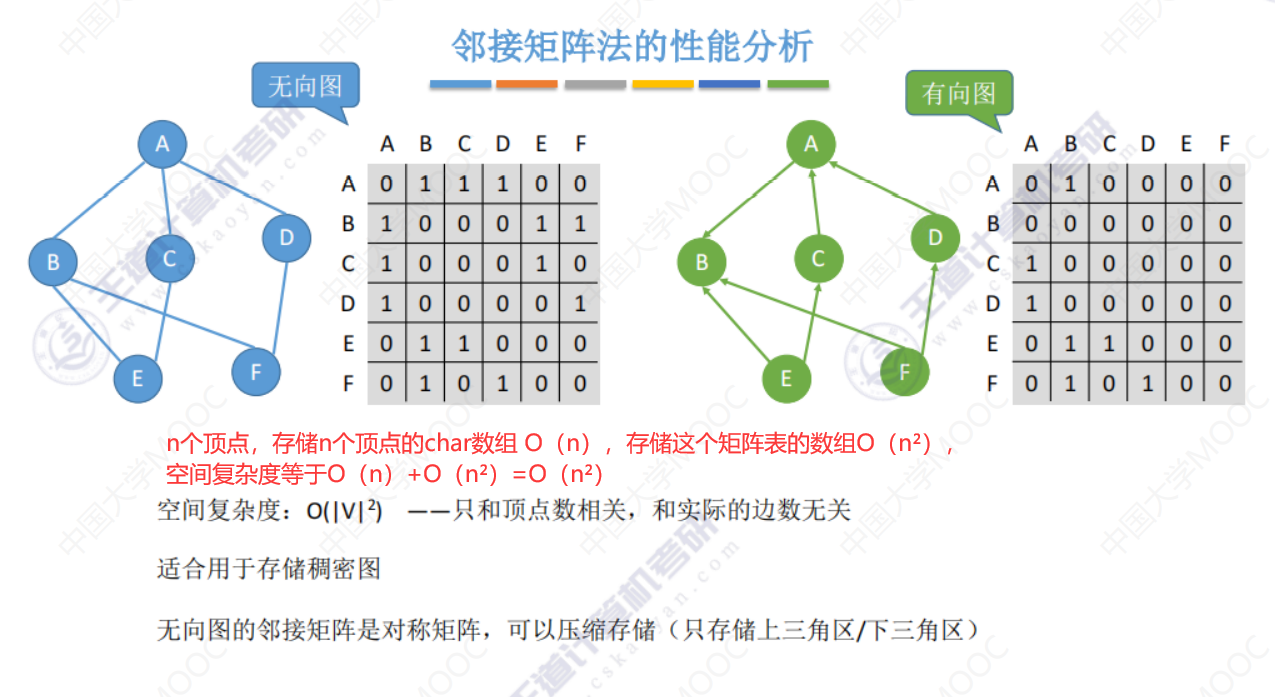
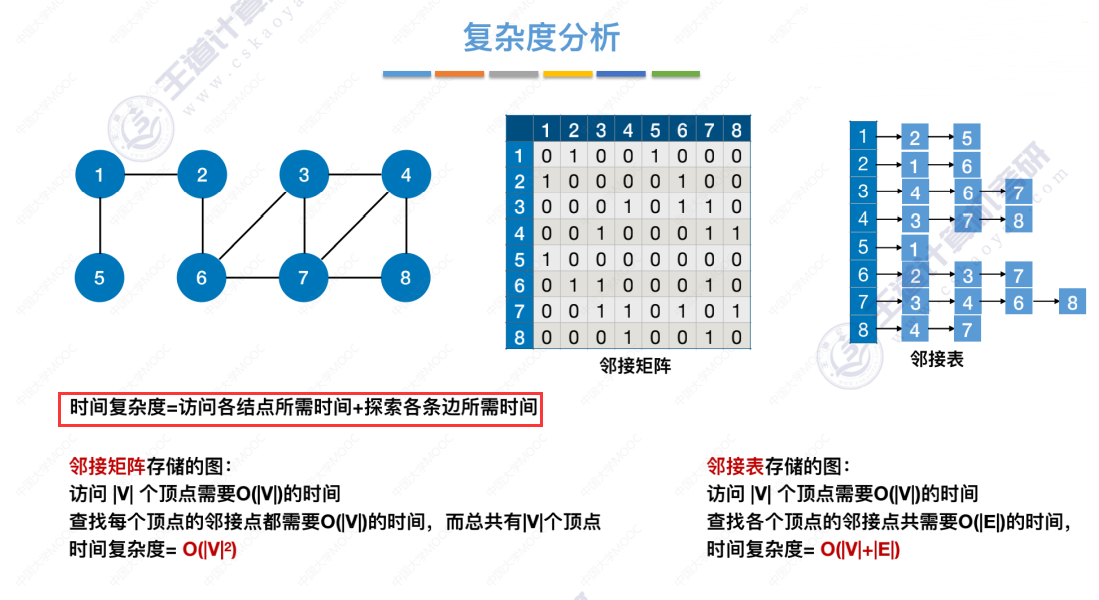
邻接矩阵法的性能分析
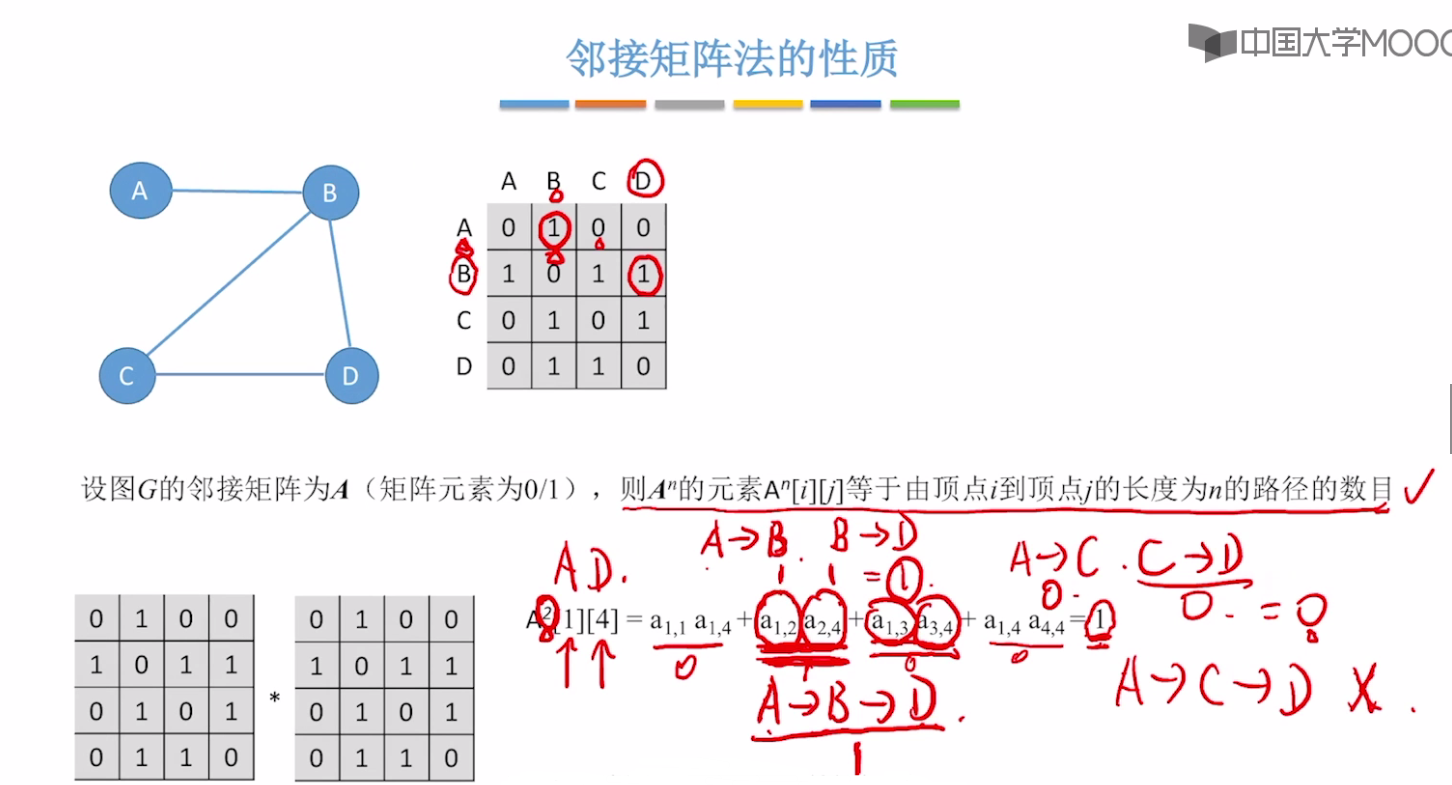
邻接矩阵法的性质
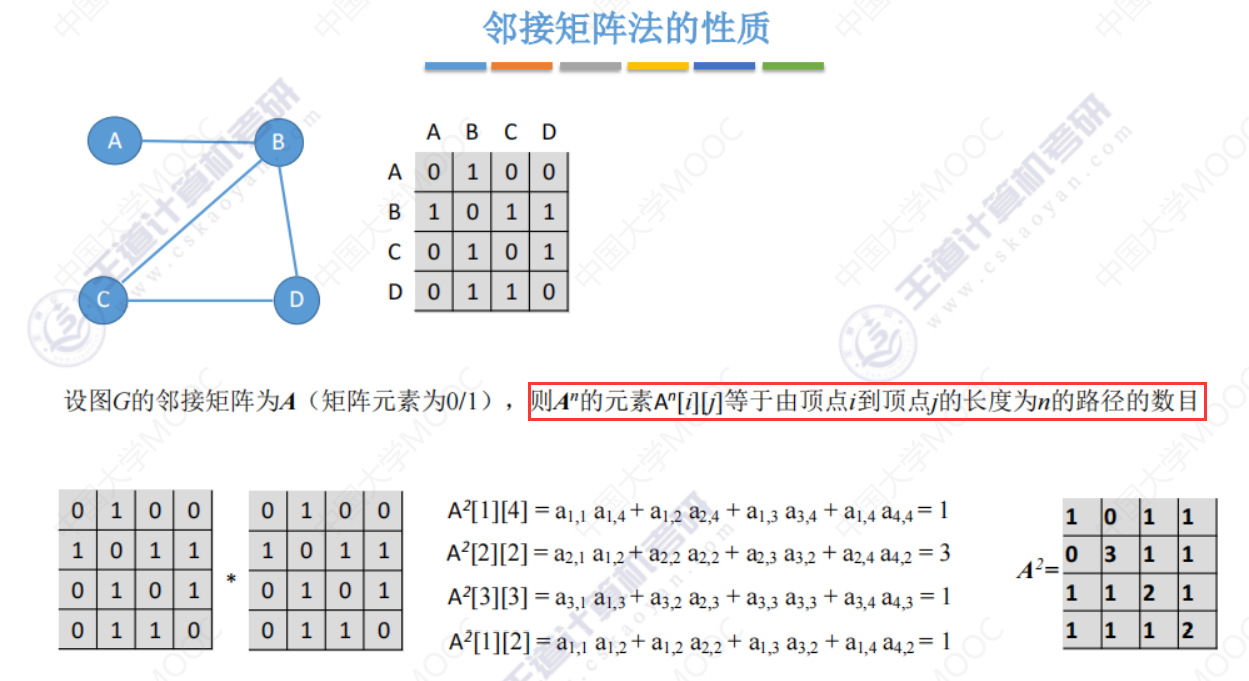
矩阵相乘
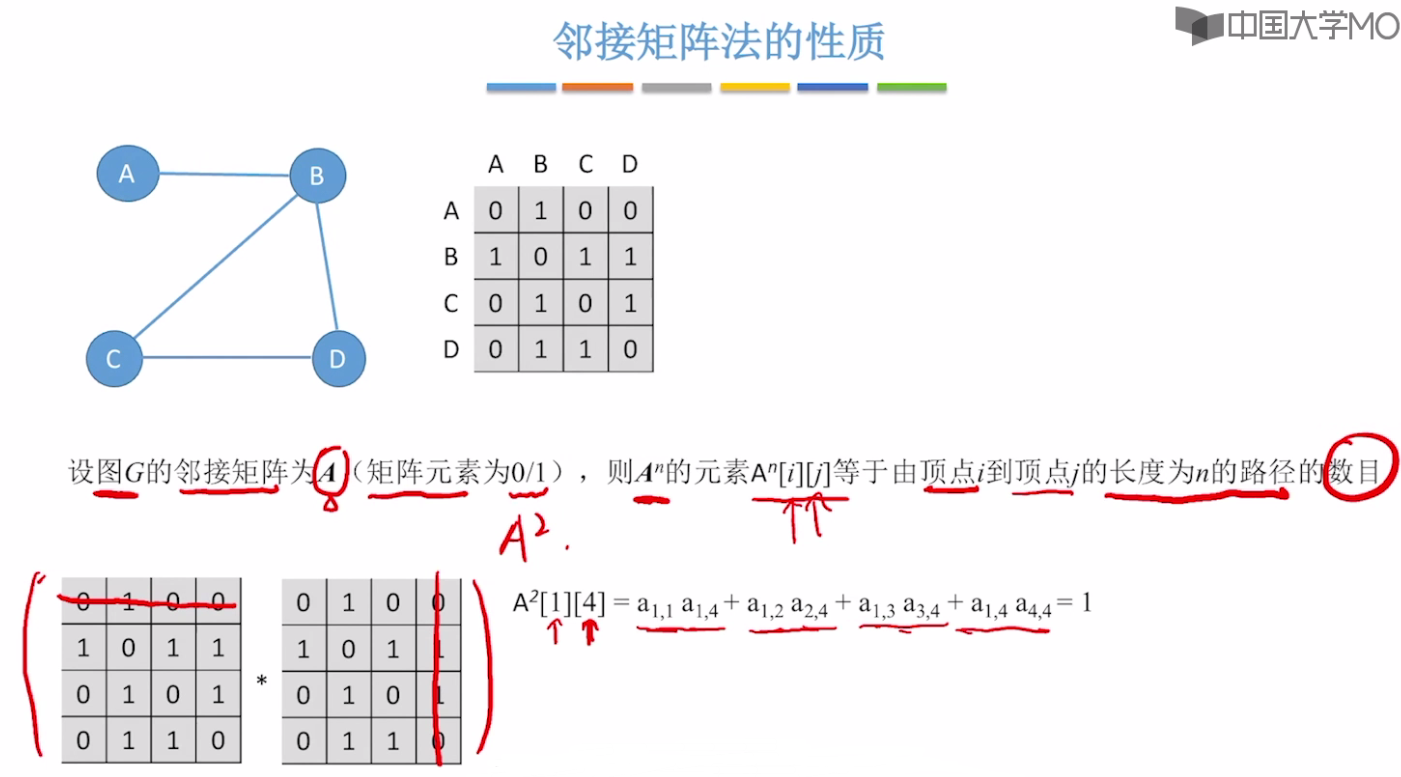
从顶点1到顶点4的长度为2的路径的数目为1
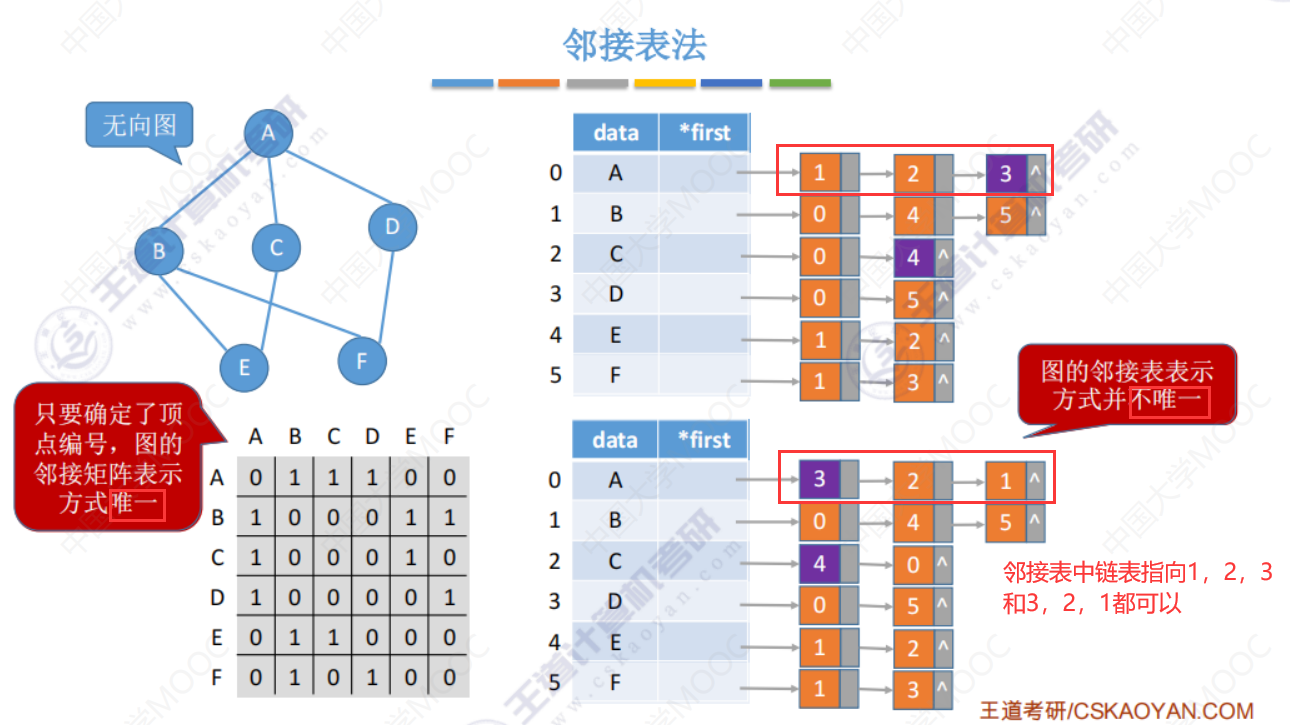
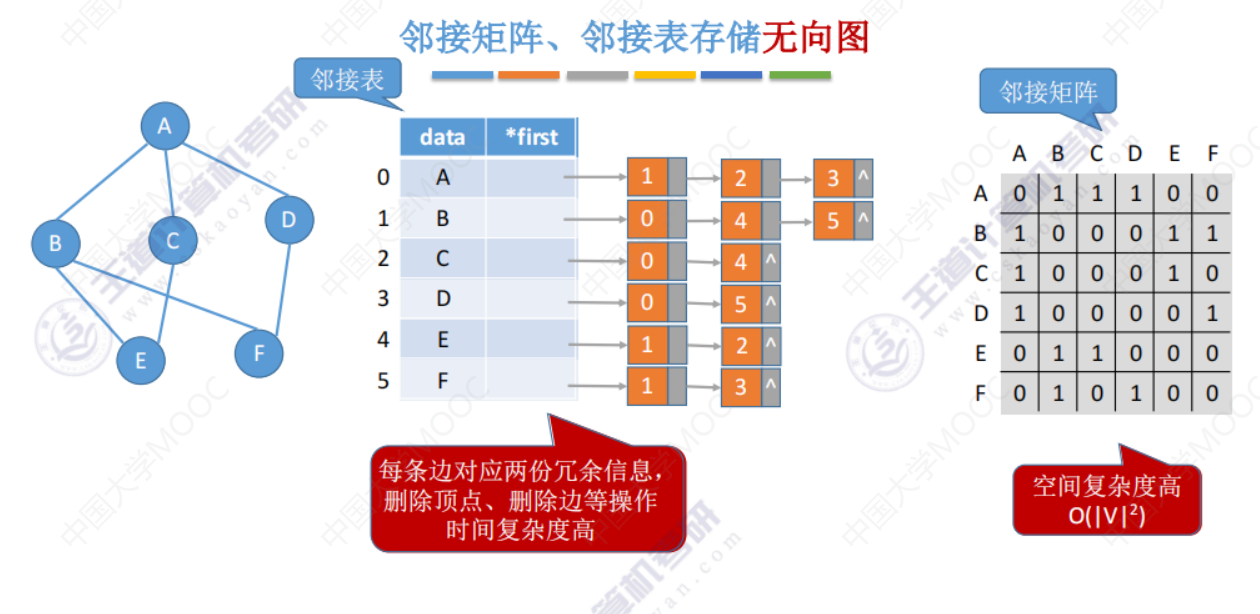
6.2-2 邻接表法(顺序+链式存储)
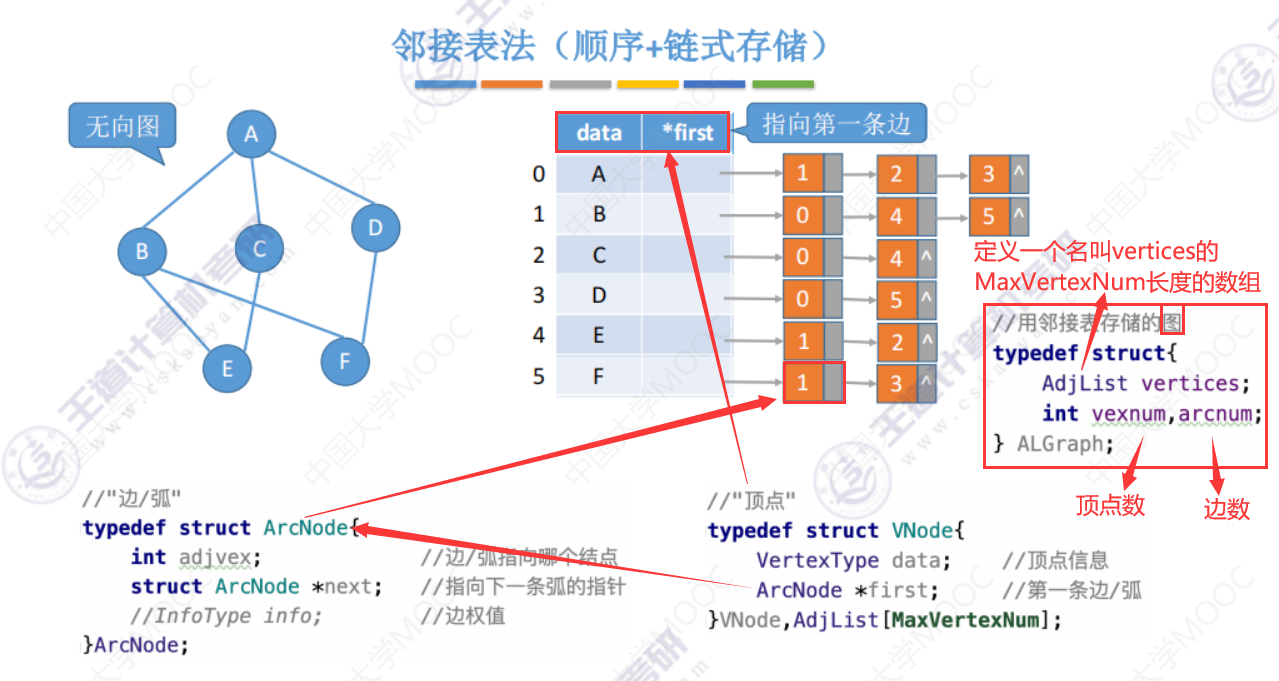
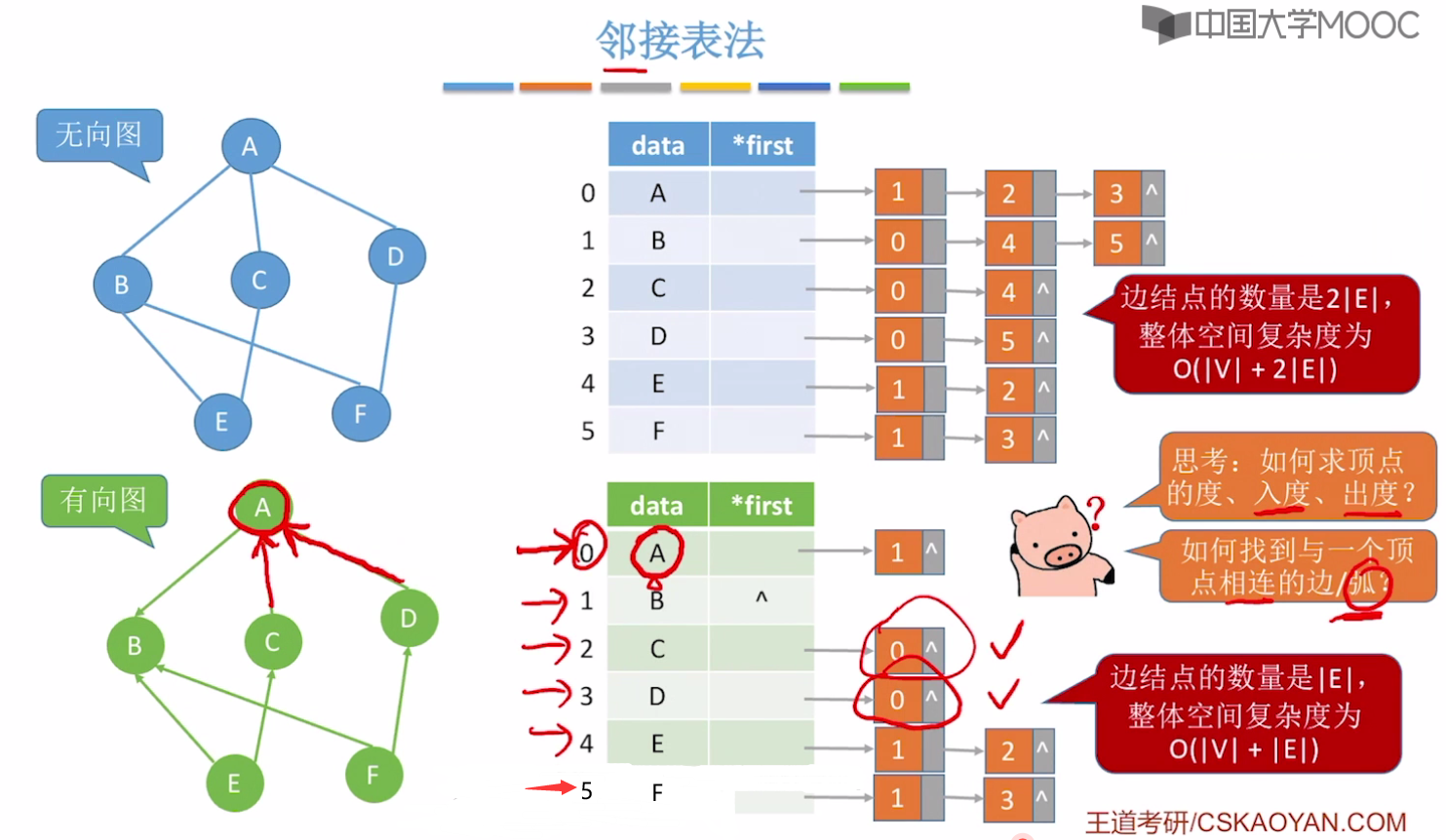
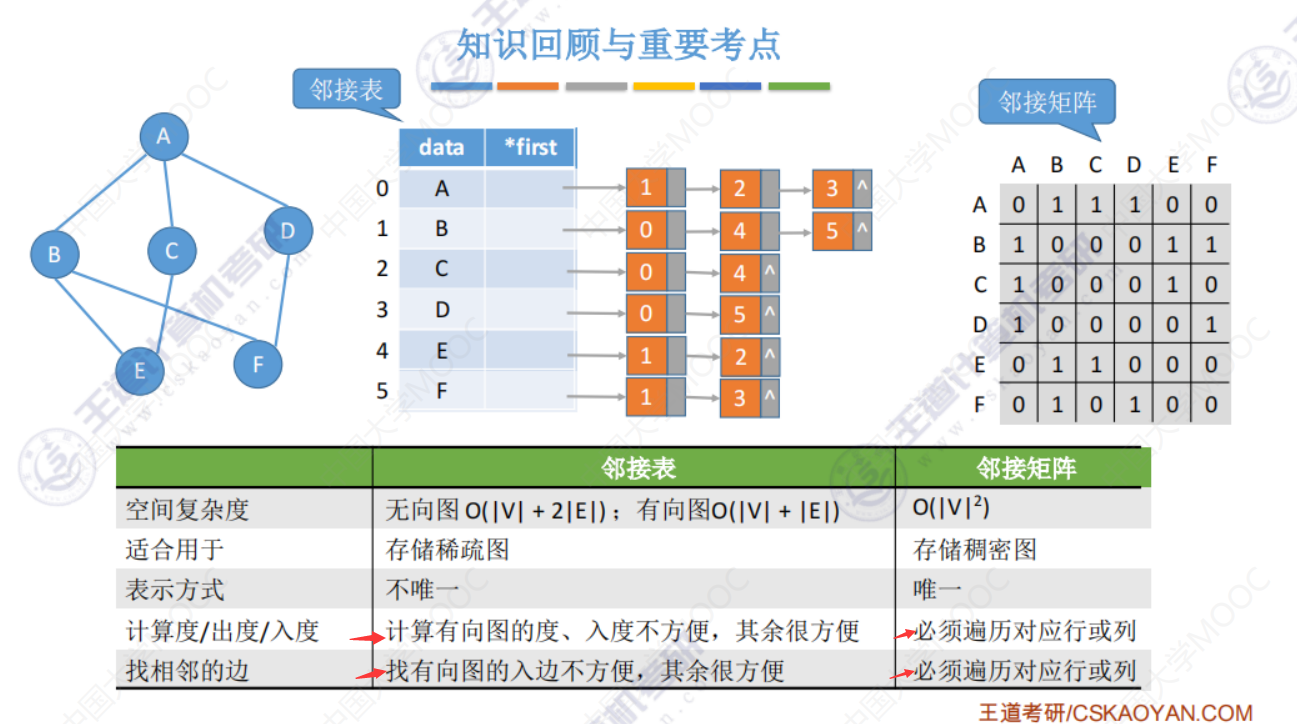
无向图中:边会被链表使用两次,所以边结点的数量是2|E|,整体空间复杂度是O(|V|+2|E|).
无向图中度就是遍历对应结点的链表就行了。
有向图中:求出度容易,直接遍历对应结点的链表就行了,找 出边也容易,如果求入度、度、入边,那么需要遍历整个表才行。
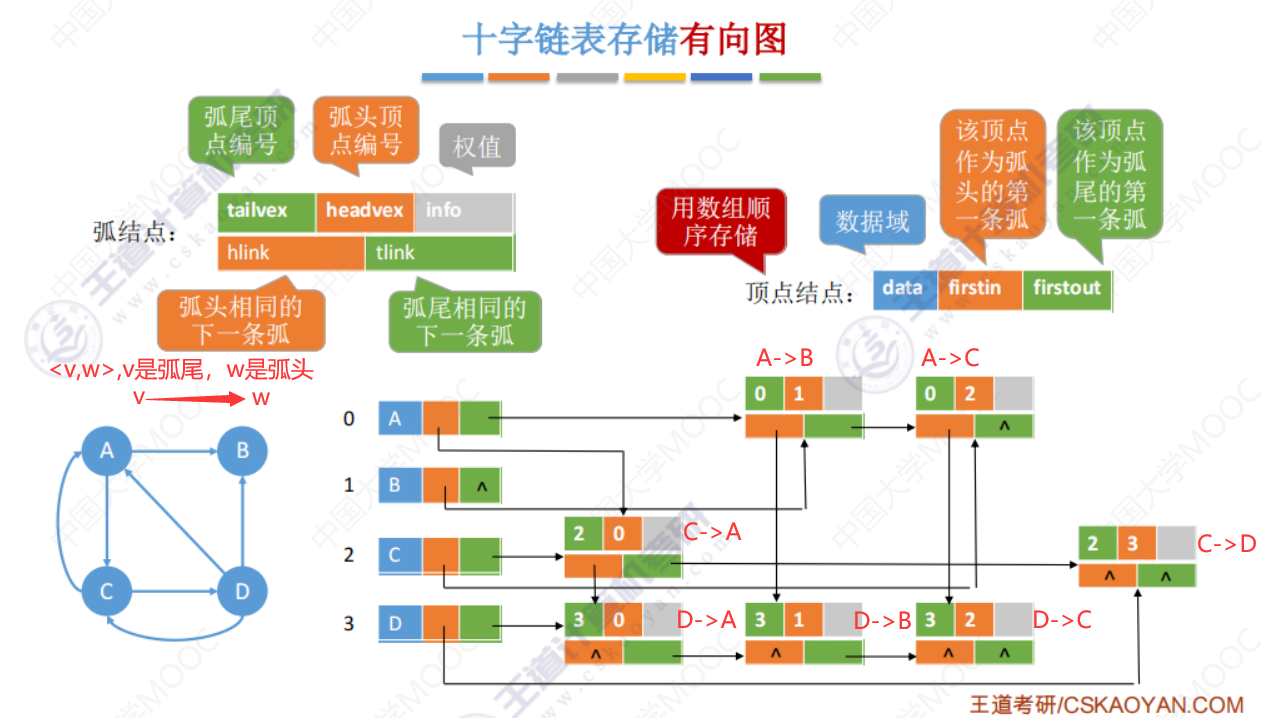
6.2-3 十字链表、邻接多重表
十字链表(存储有向图)
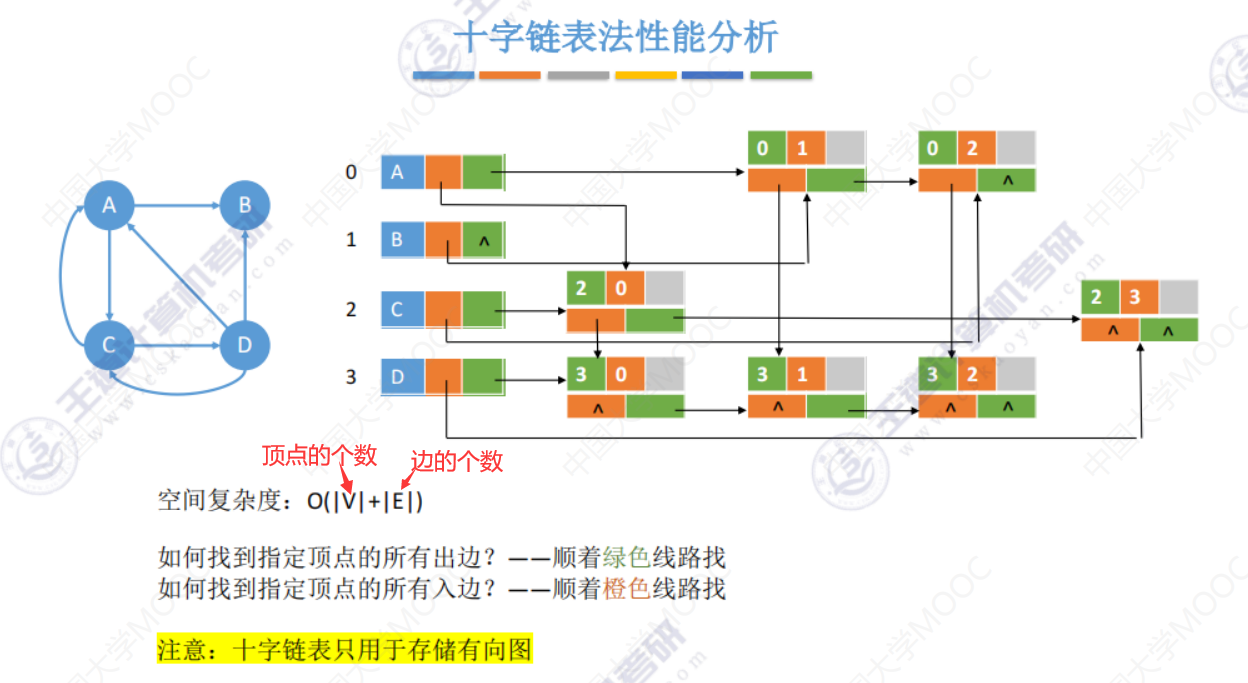
十字链表法解决了有向图 找入边 不方便问题。
橙色连接了弧头相同的弧,绿色连接了弧尾相同的弧。
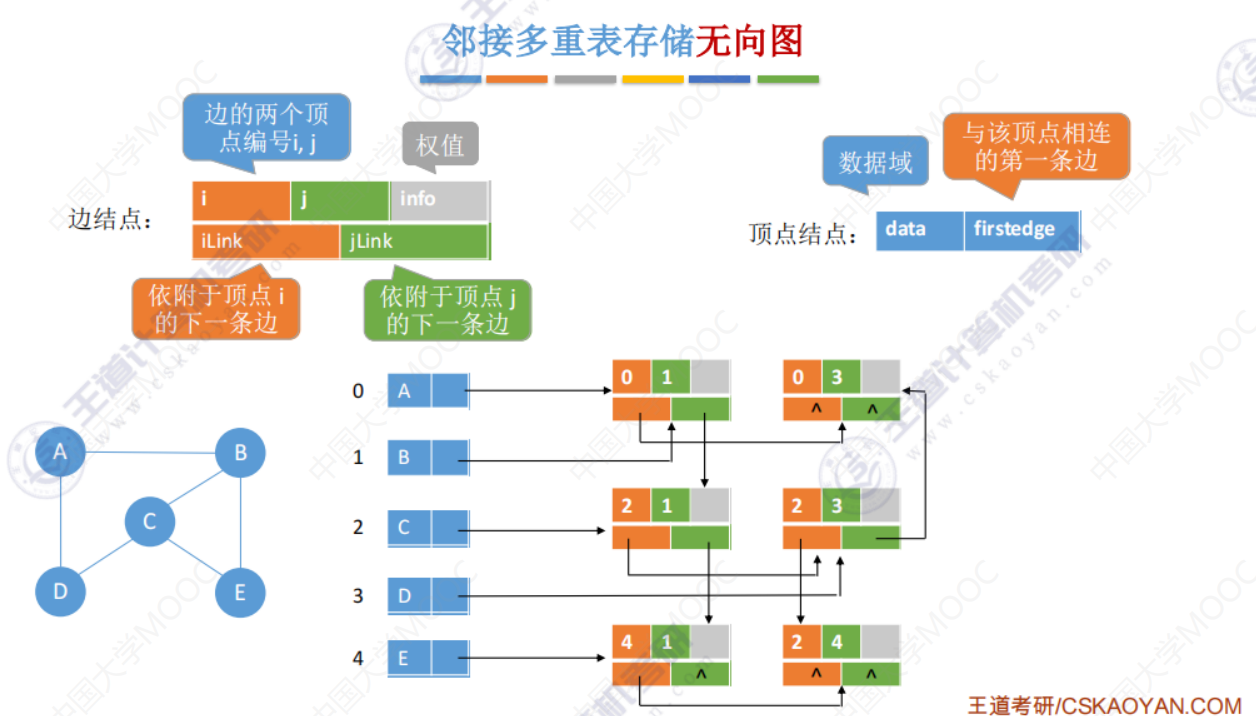
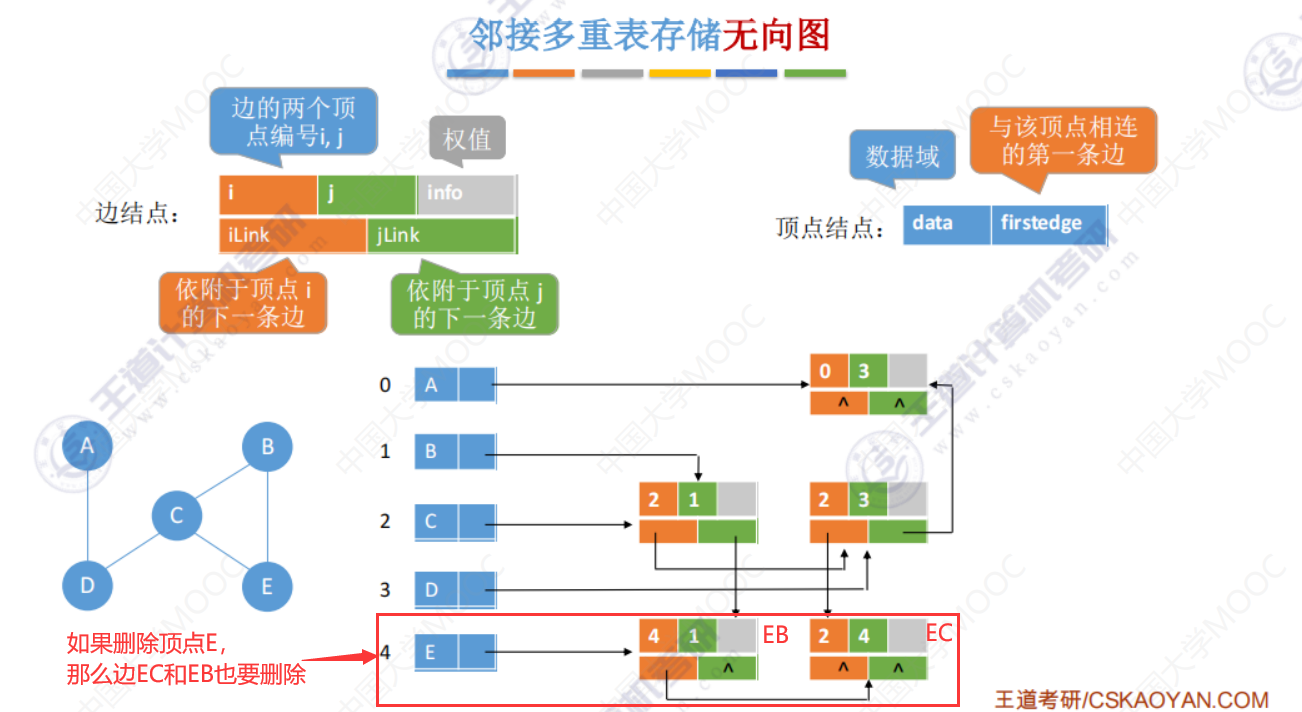
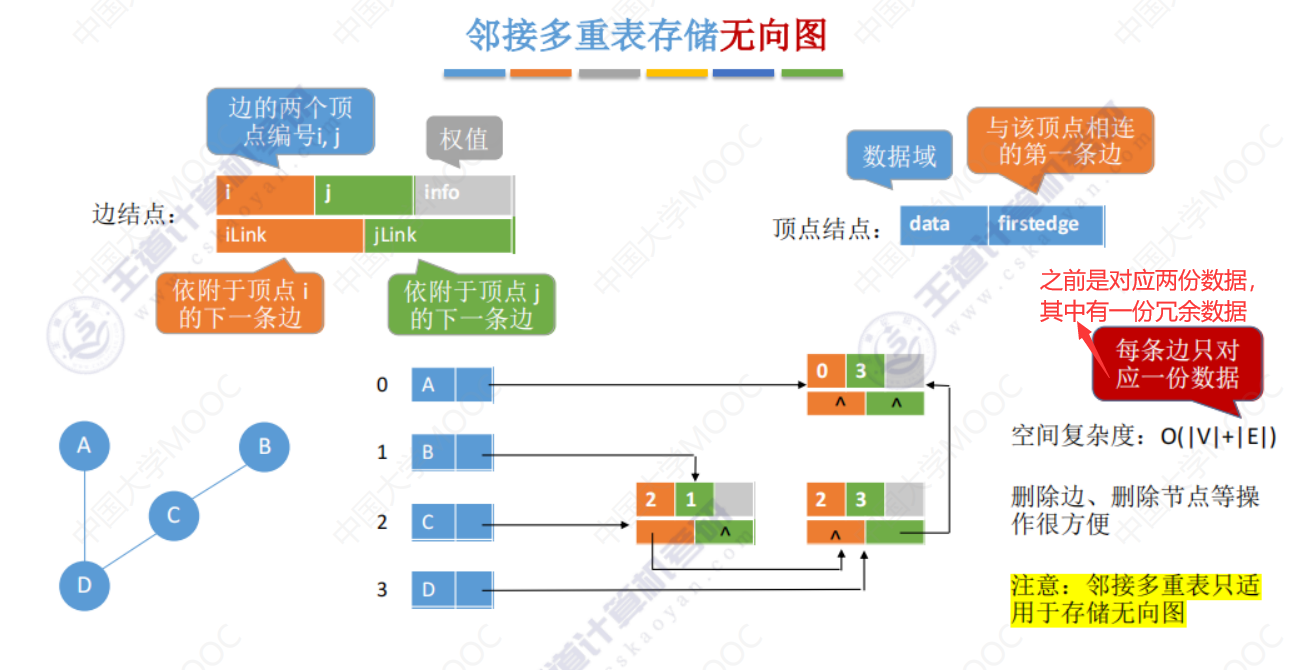
邻接多重表(存储无向图)
邻接矩阵、邻接表 存储无向图的缺点
邻接多重表 存储无向图
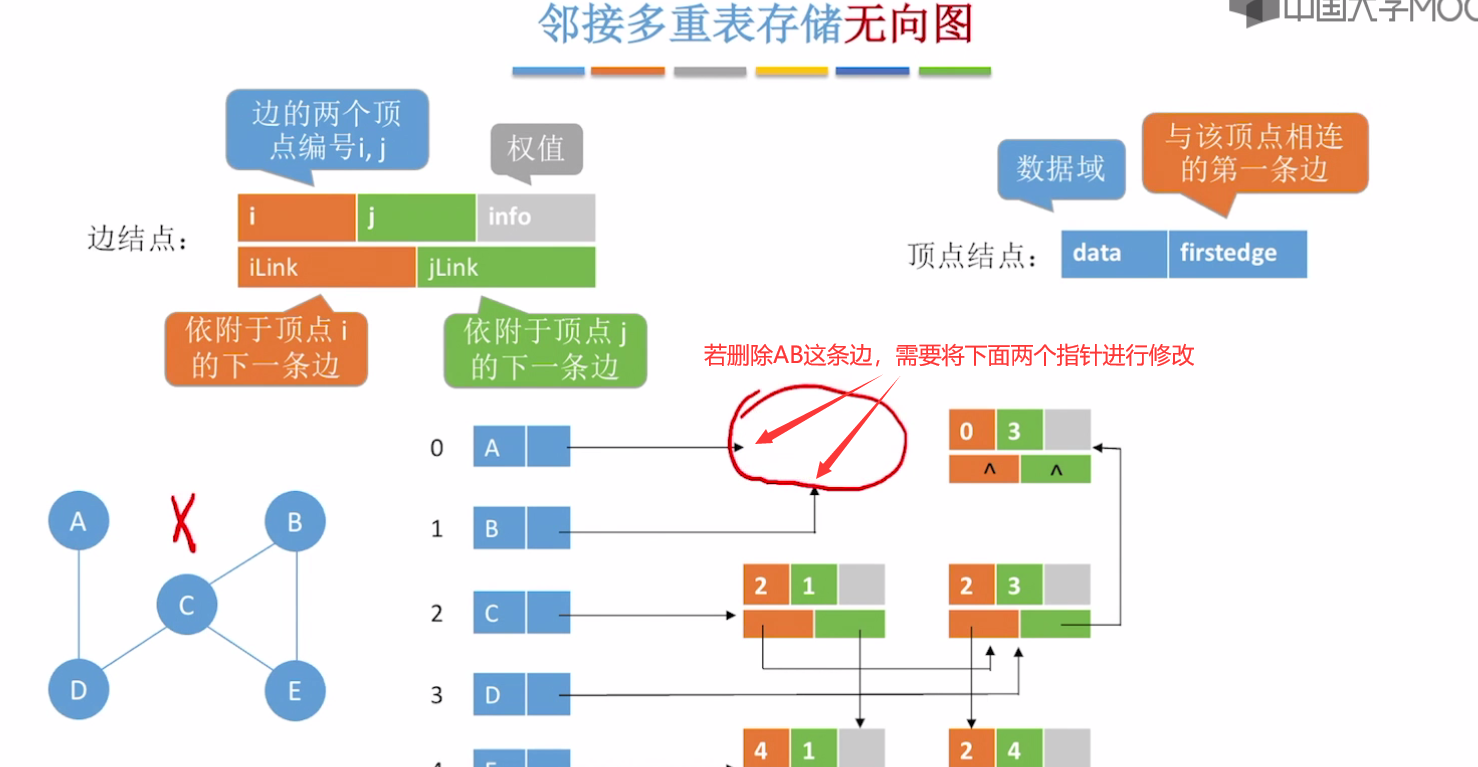
两个删除操作
删除一条边
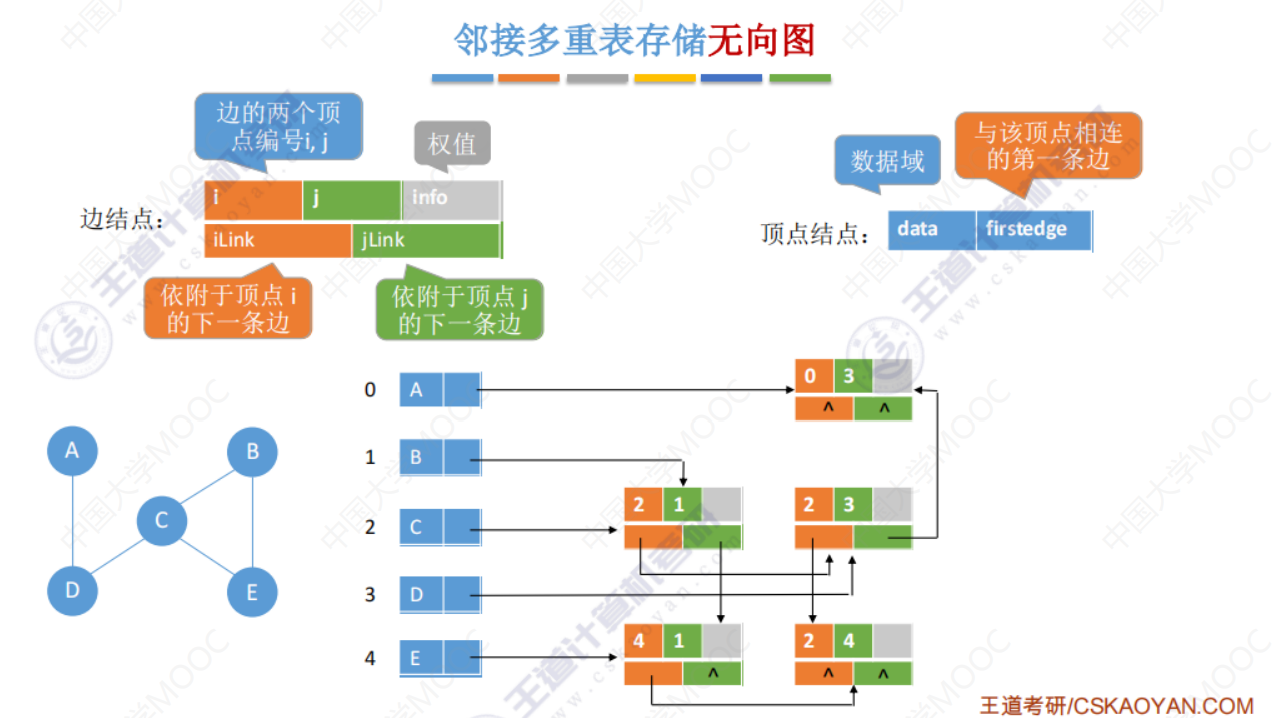
删除一个顶点(同时也把与该顶点连接的边进行删除)
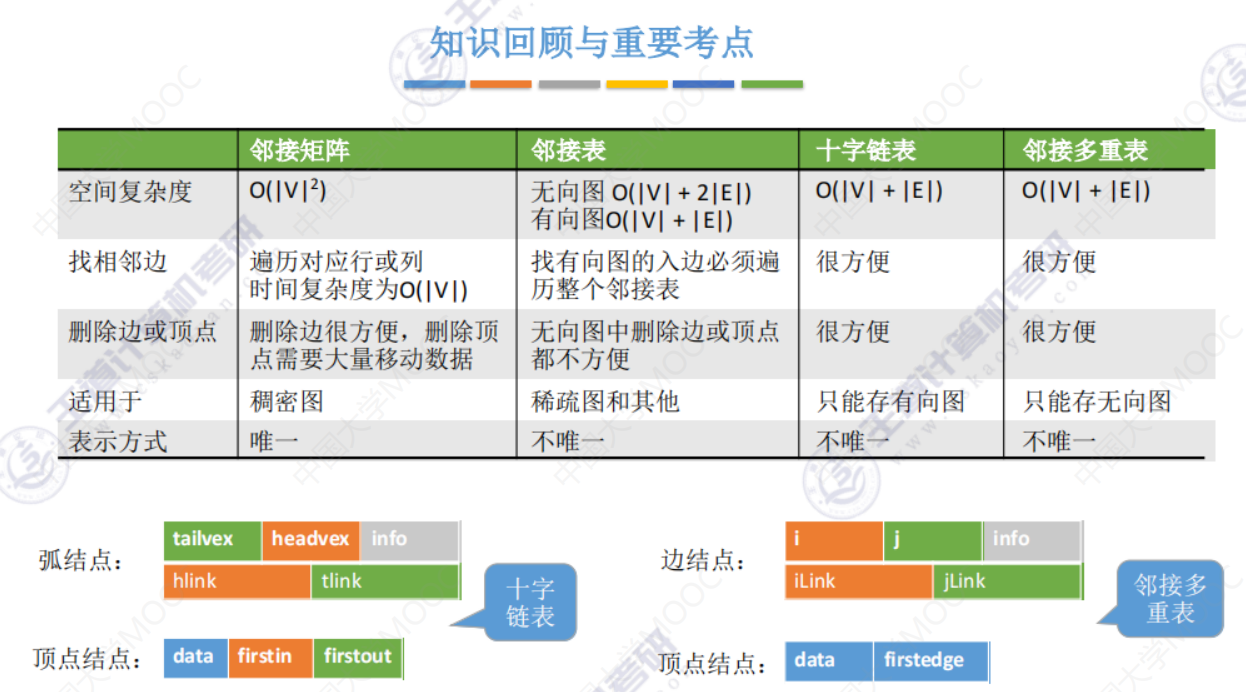
邻接矩阵、邻接表、十字链表、邻接多重表 总结
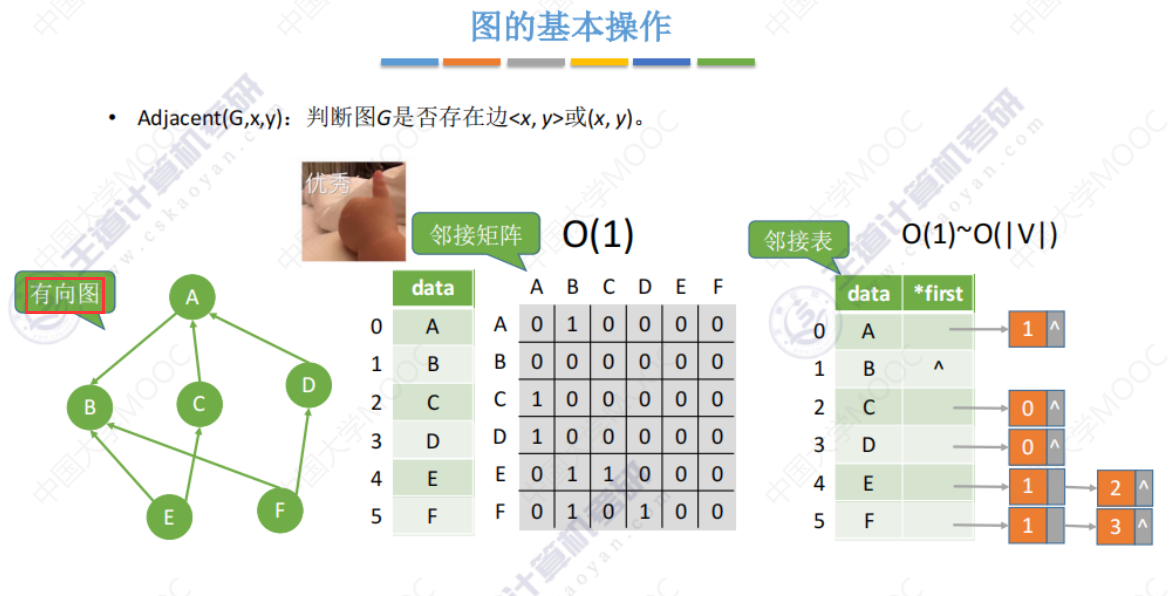
6.2-4 图的基本操作
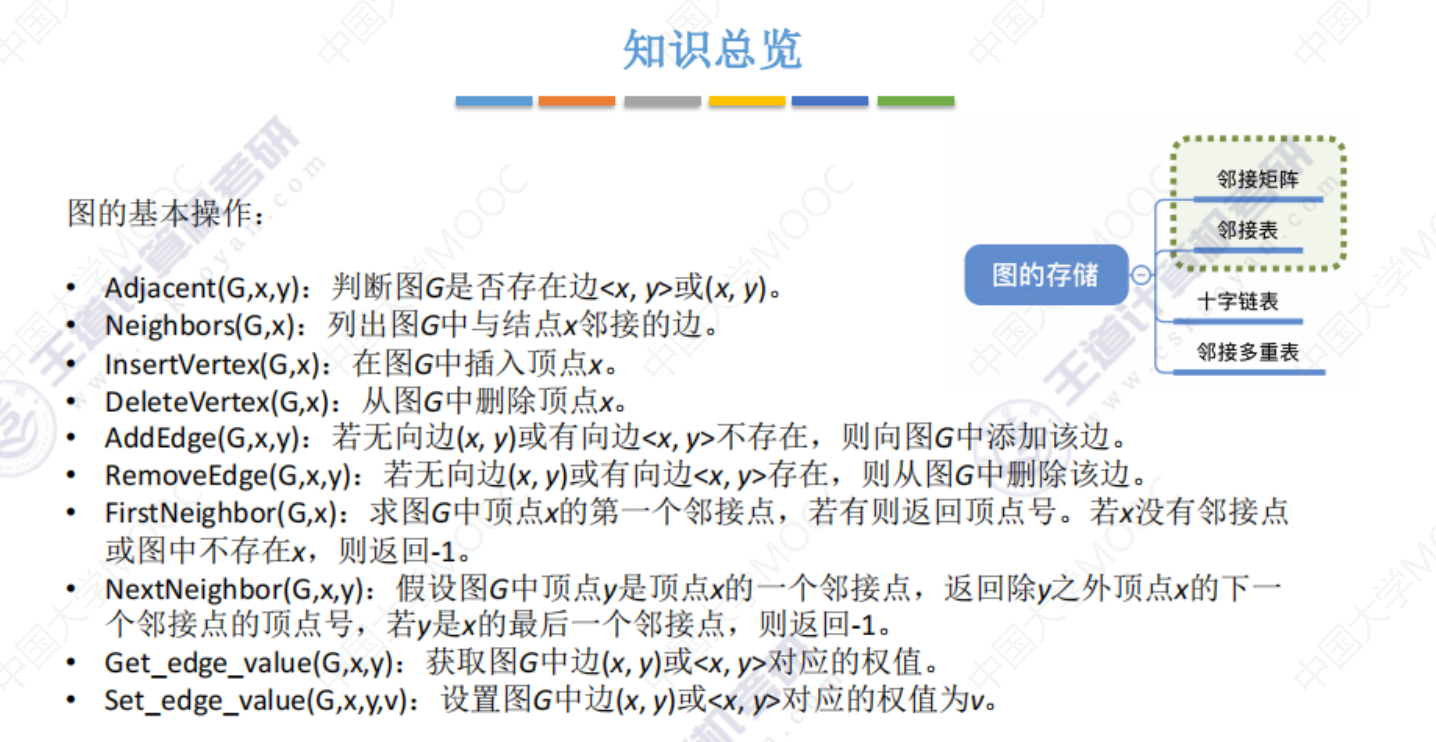
Adjacent()

Neighbors()


InsertVertex()

DeleteVertex()

下图O(|E|)是 要遍历每一条边 来删除与 被删除结点 有关的边,如图中就是遍历每条边来删除与结点C有关的边。


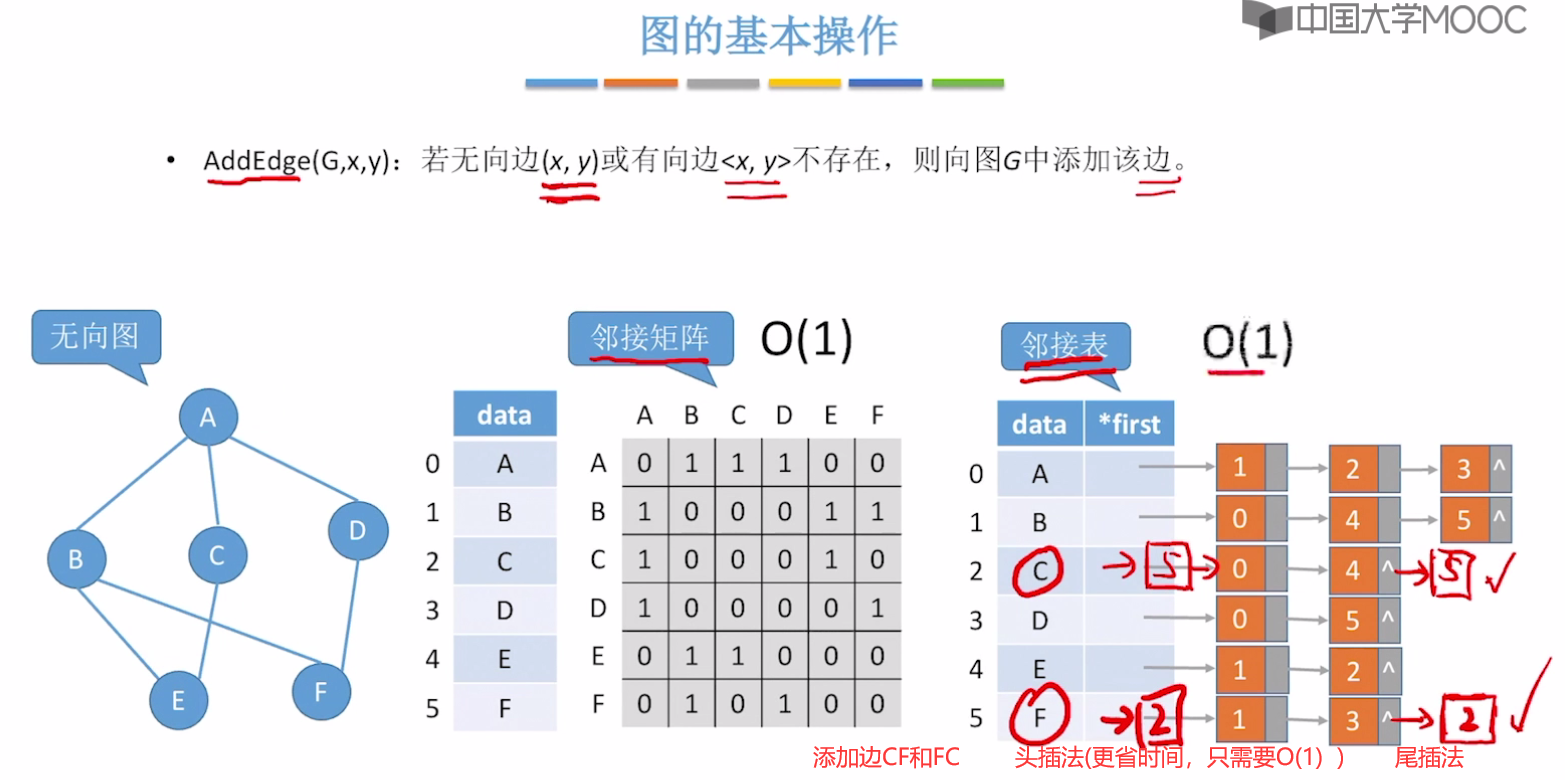
AddEdge()
RemoveEdge()

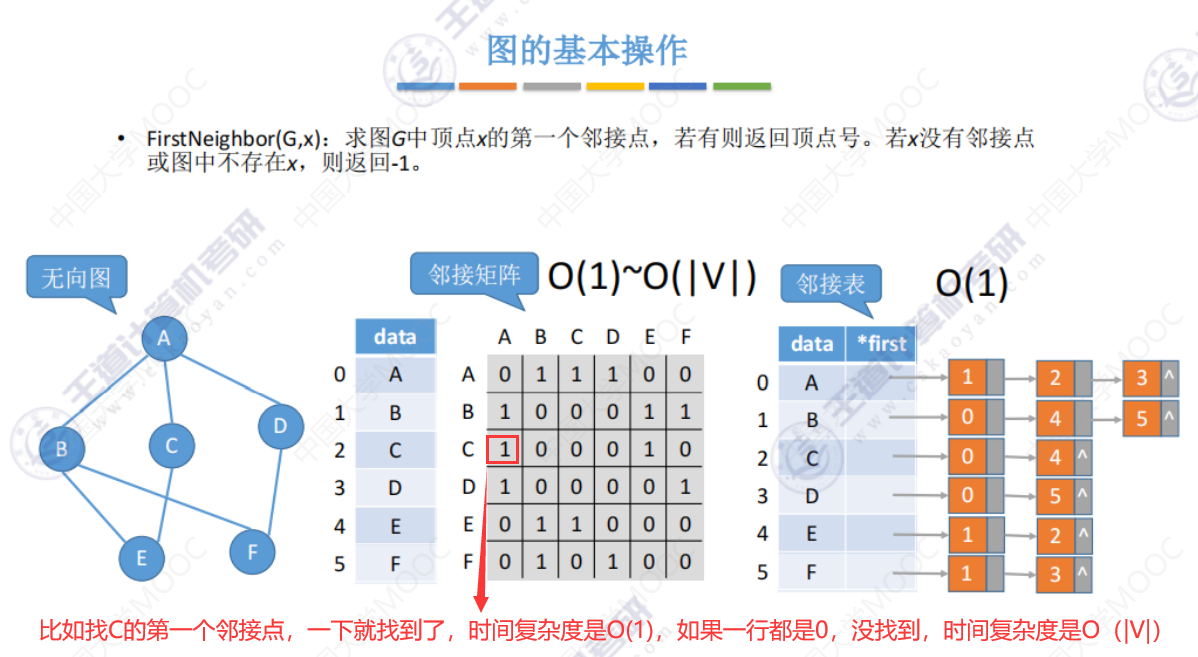
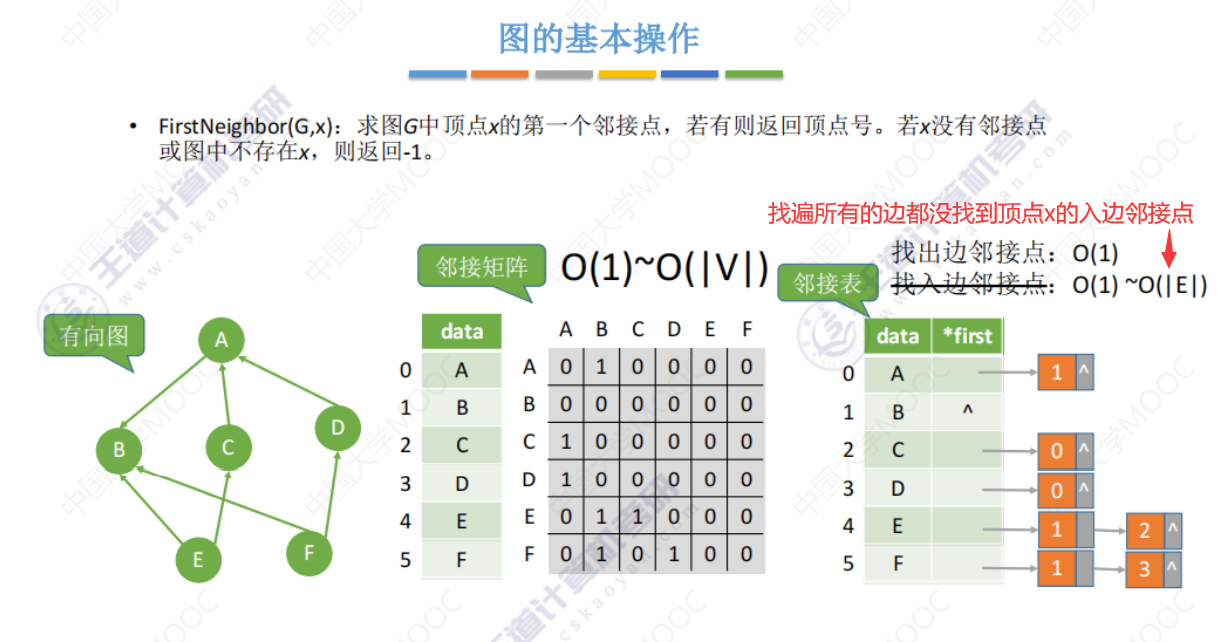
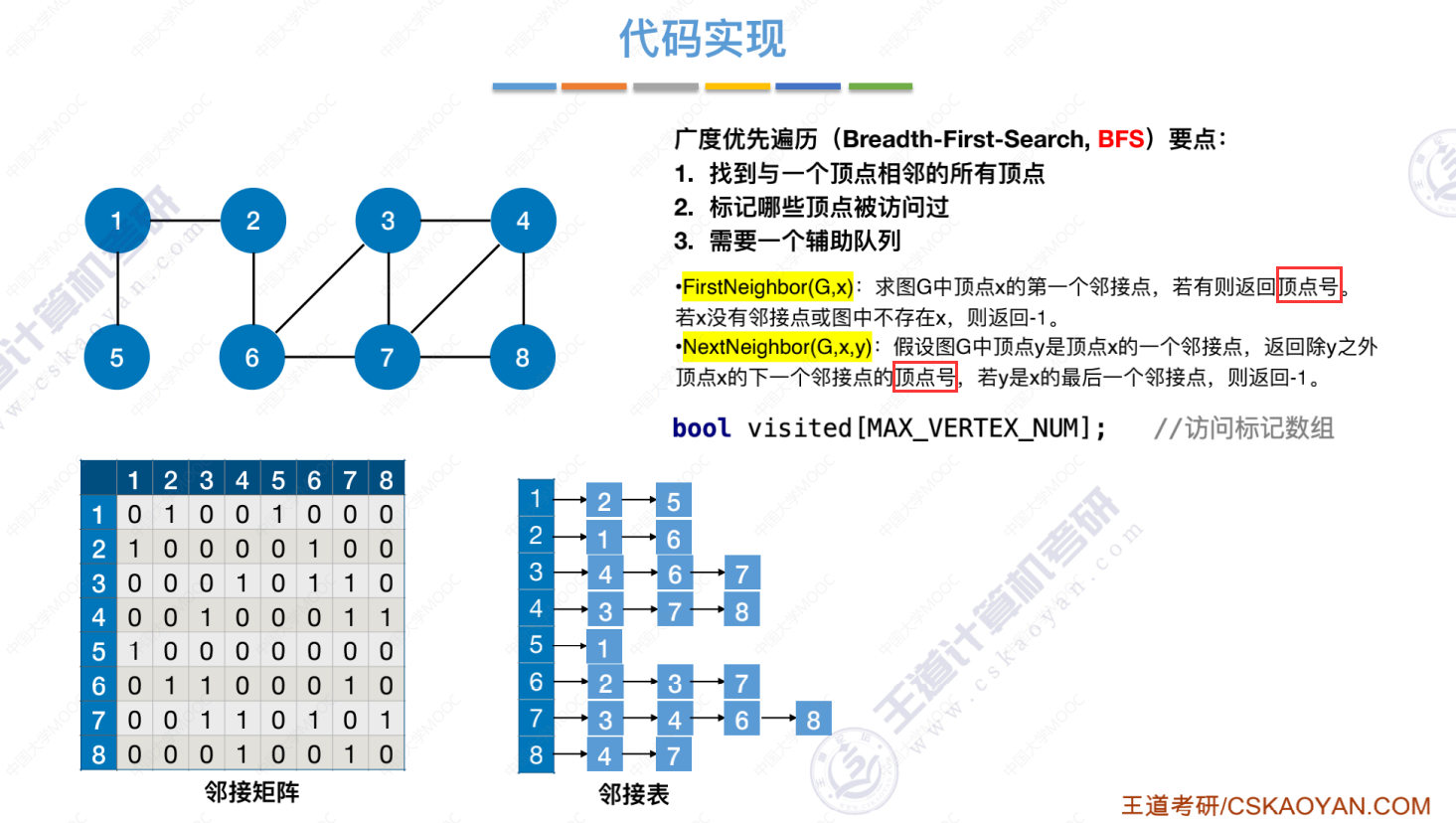
FirstNeighbor()
NextNeighbor()

获取或设置权值
获取或设置权值 即 找到对应的边,然后获取或设置权值(获取和设置权值的时间复杂度是O(1) )。所以获取或设置权值的整体操作(包括找边和设置权值)和 只找边的时间复杂度相同。

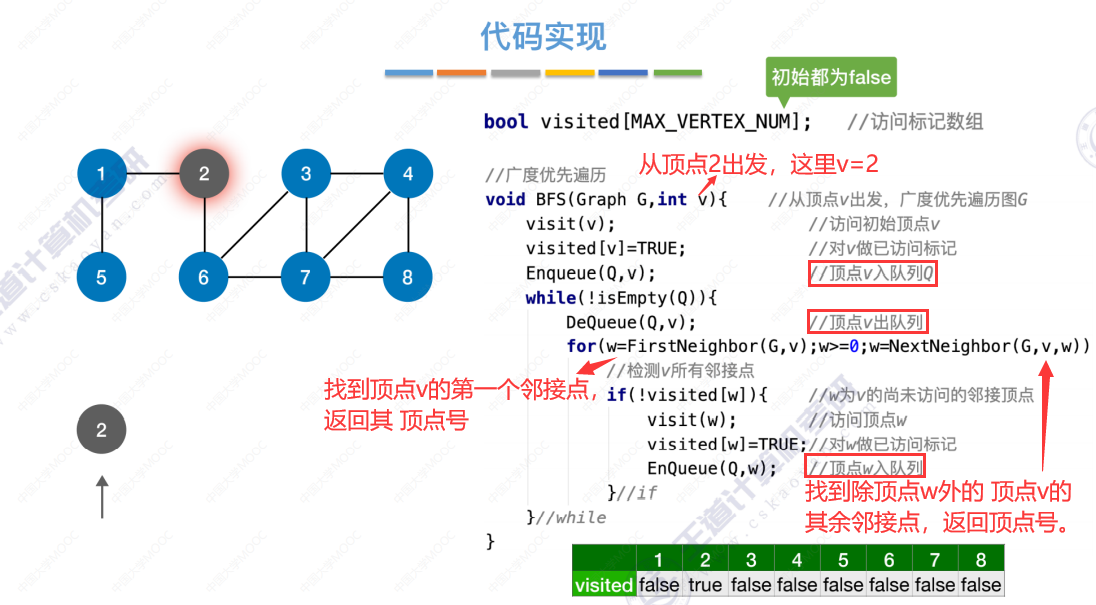
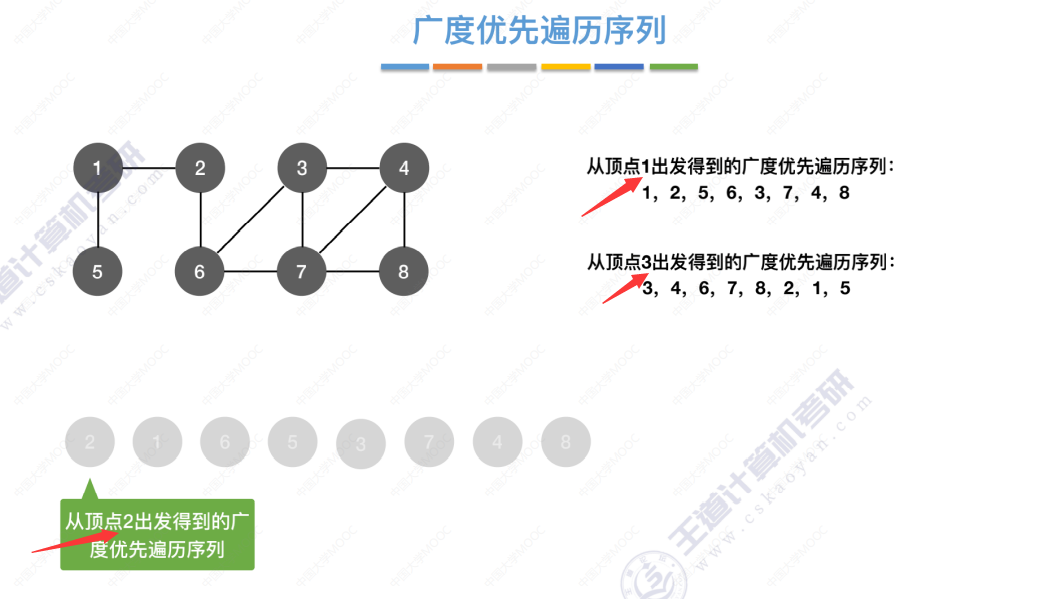
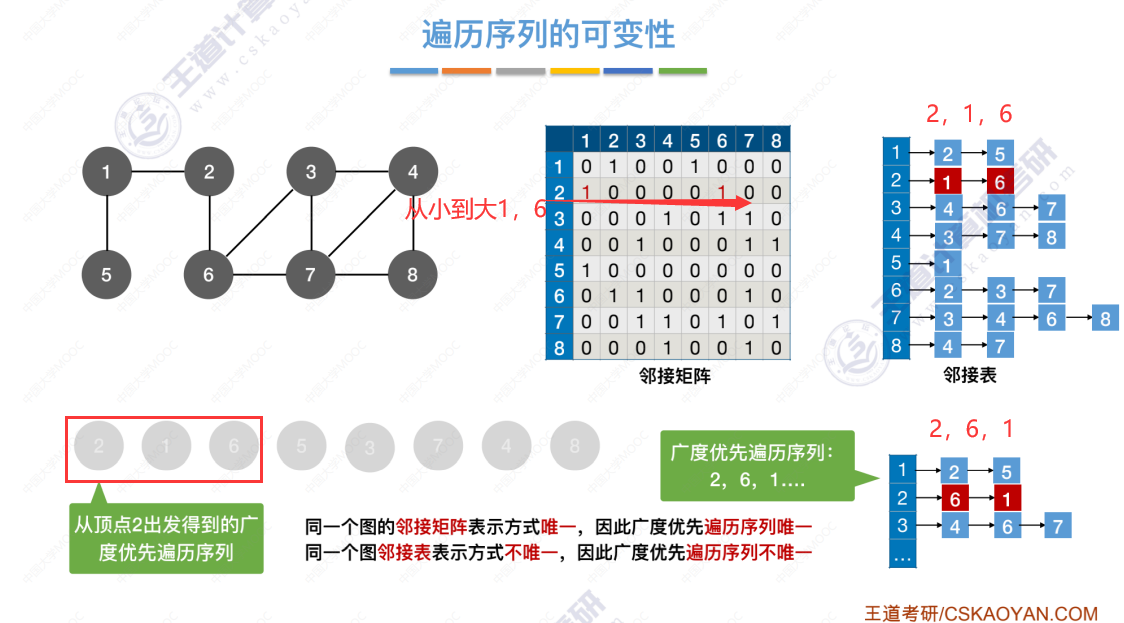
6.3-1 图的广度优先遍历
广度优先遍历代码引入
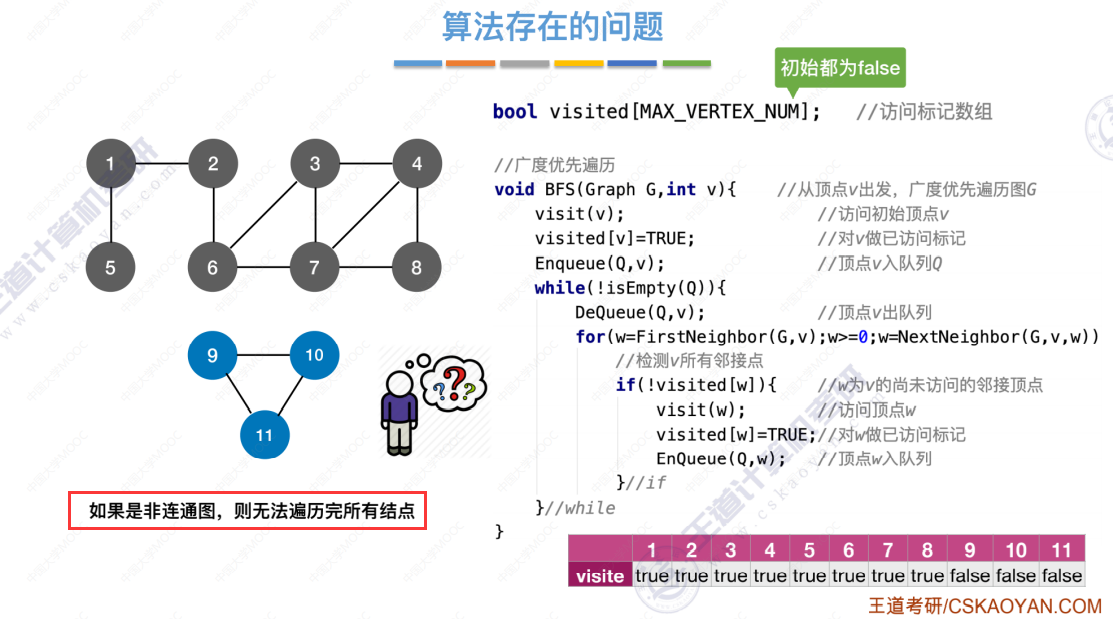
算法存在的问题
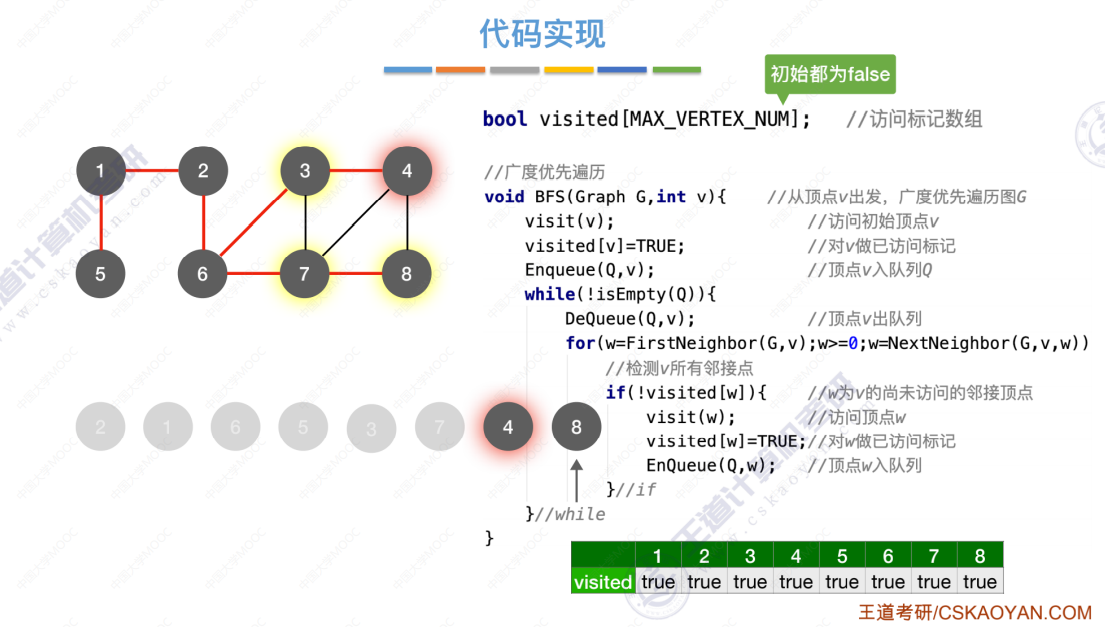
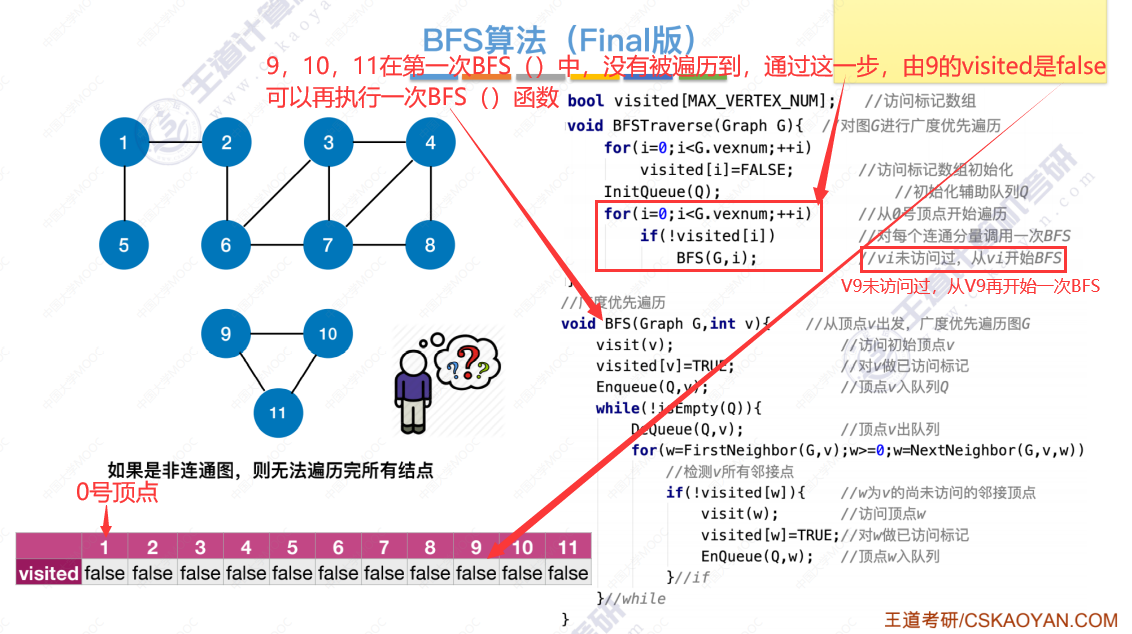
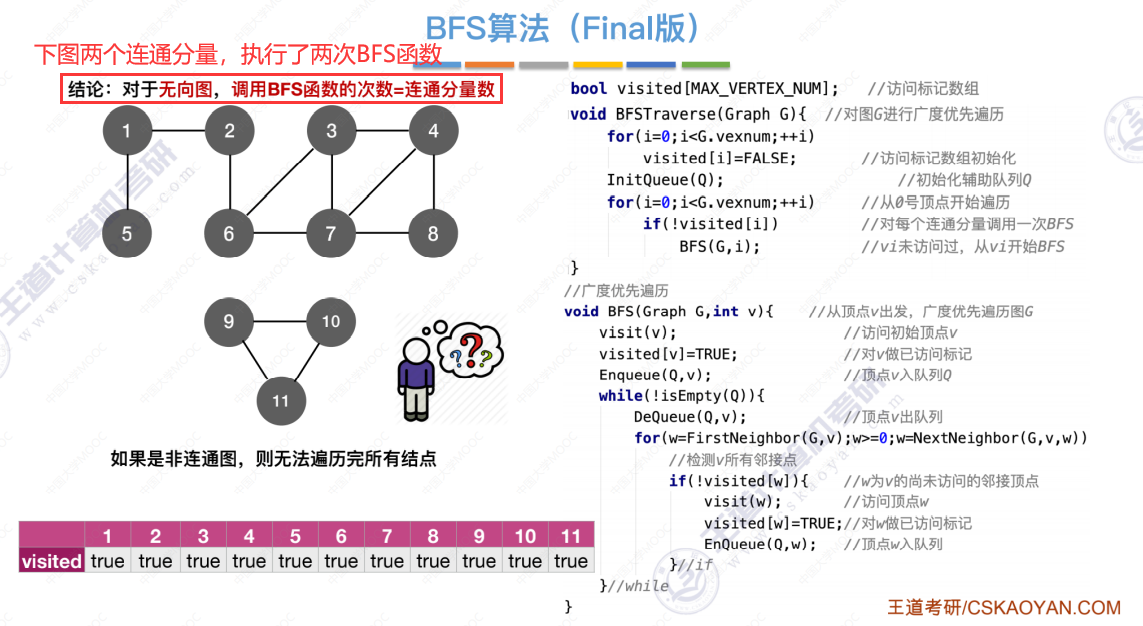
广度优先算法(Breadth-First-Search,BFS算法)最终版
算法分析
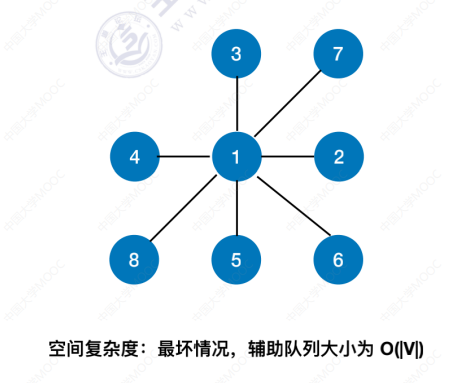
空间复杂度
最坏情况,要一次把所有邻接点(即其余结点装入辅助队列),此时空间复杂度最高。
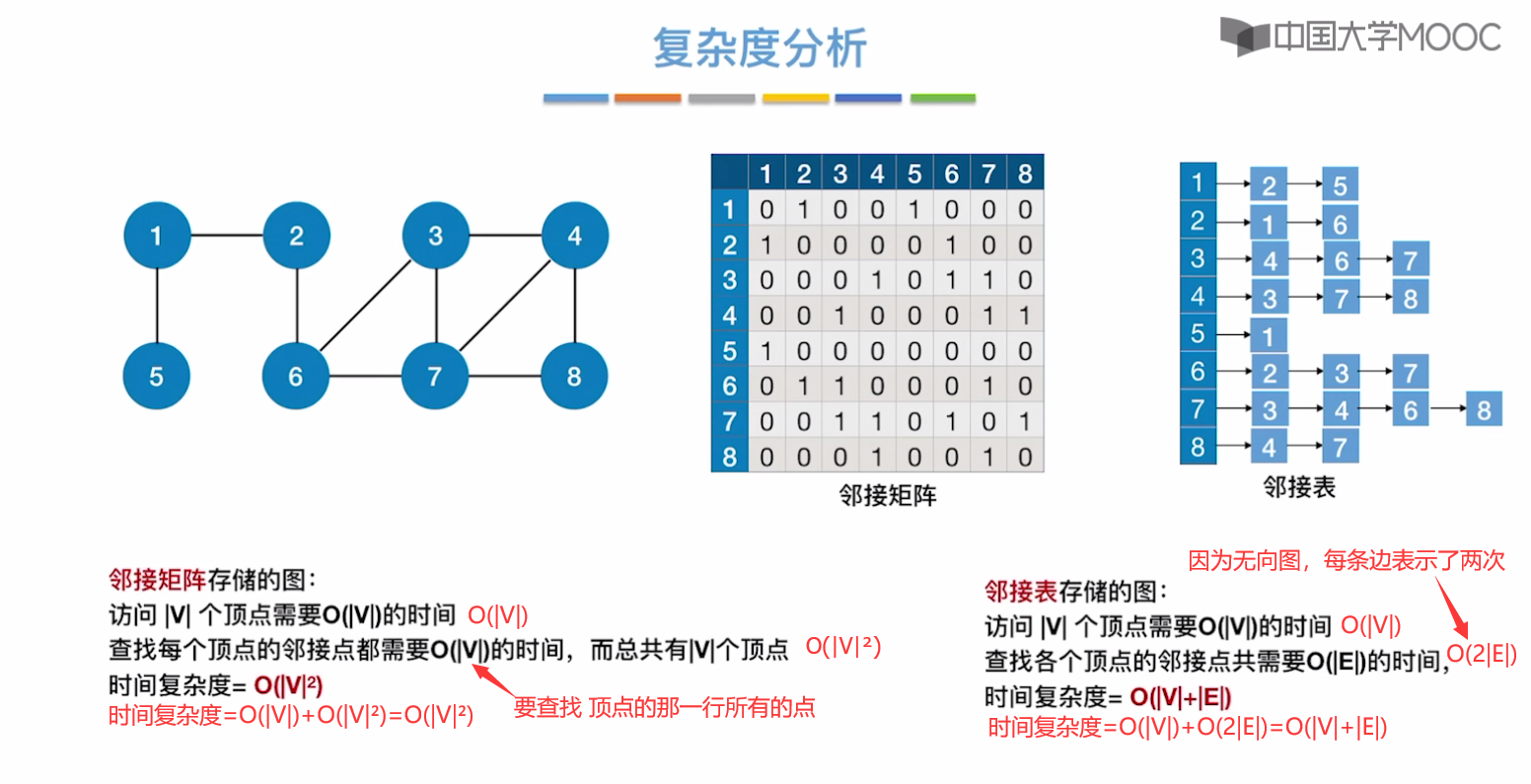
时间复杂度
算法时间开销主要是:访问各个顶点和查找每个顶点的邻接点。
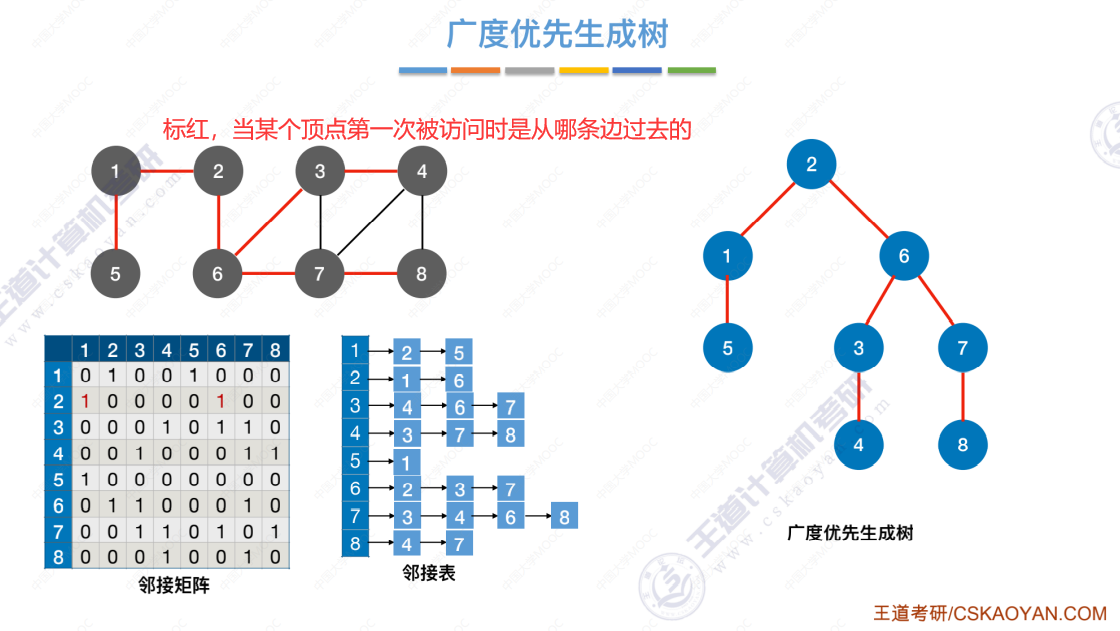
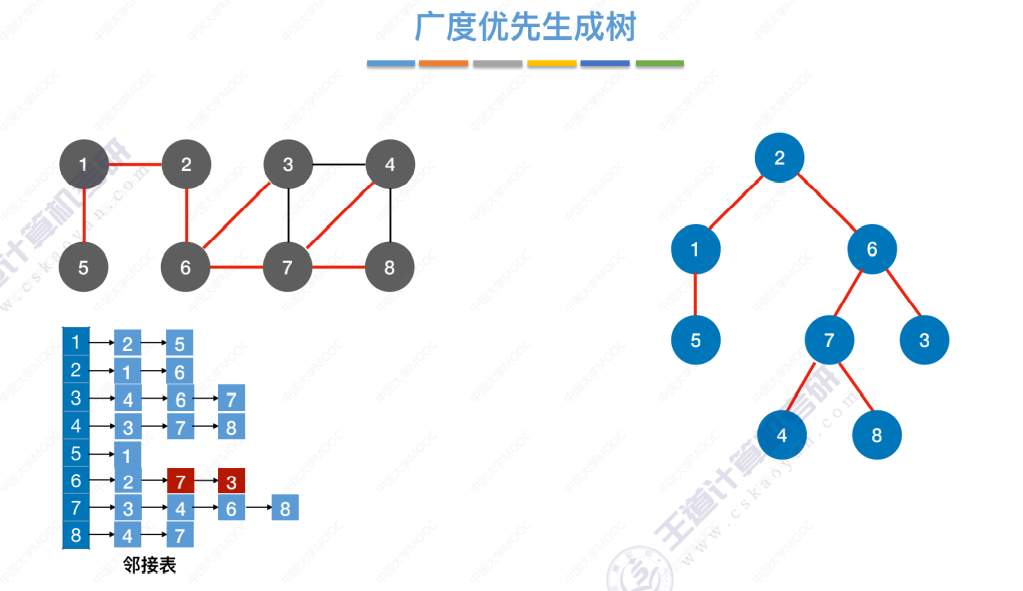
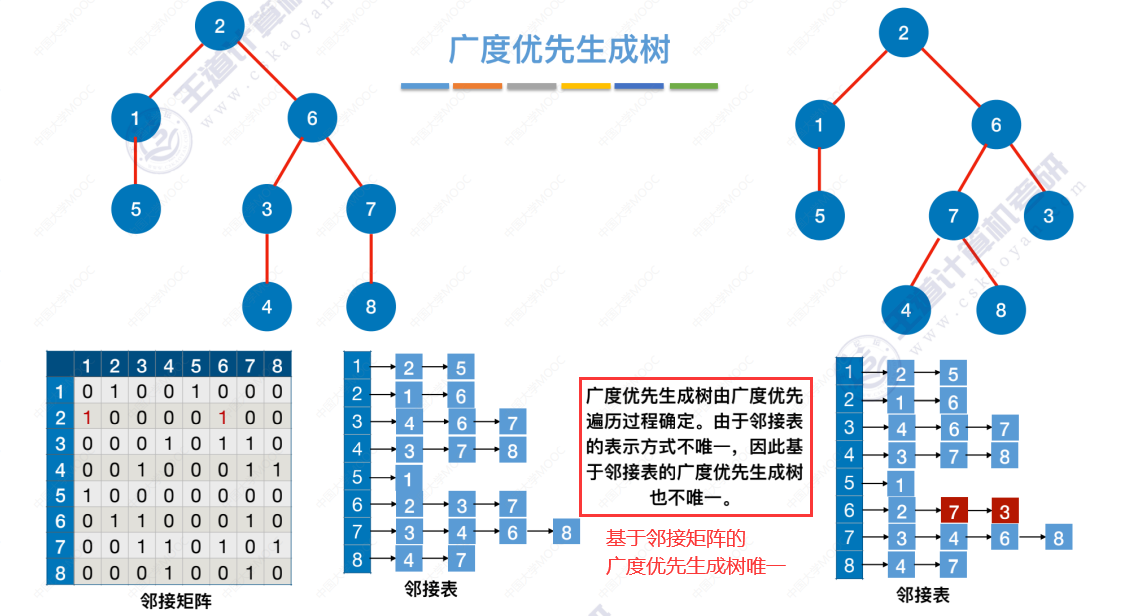
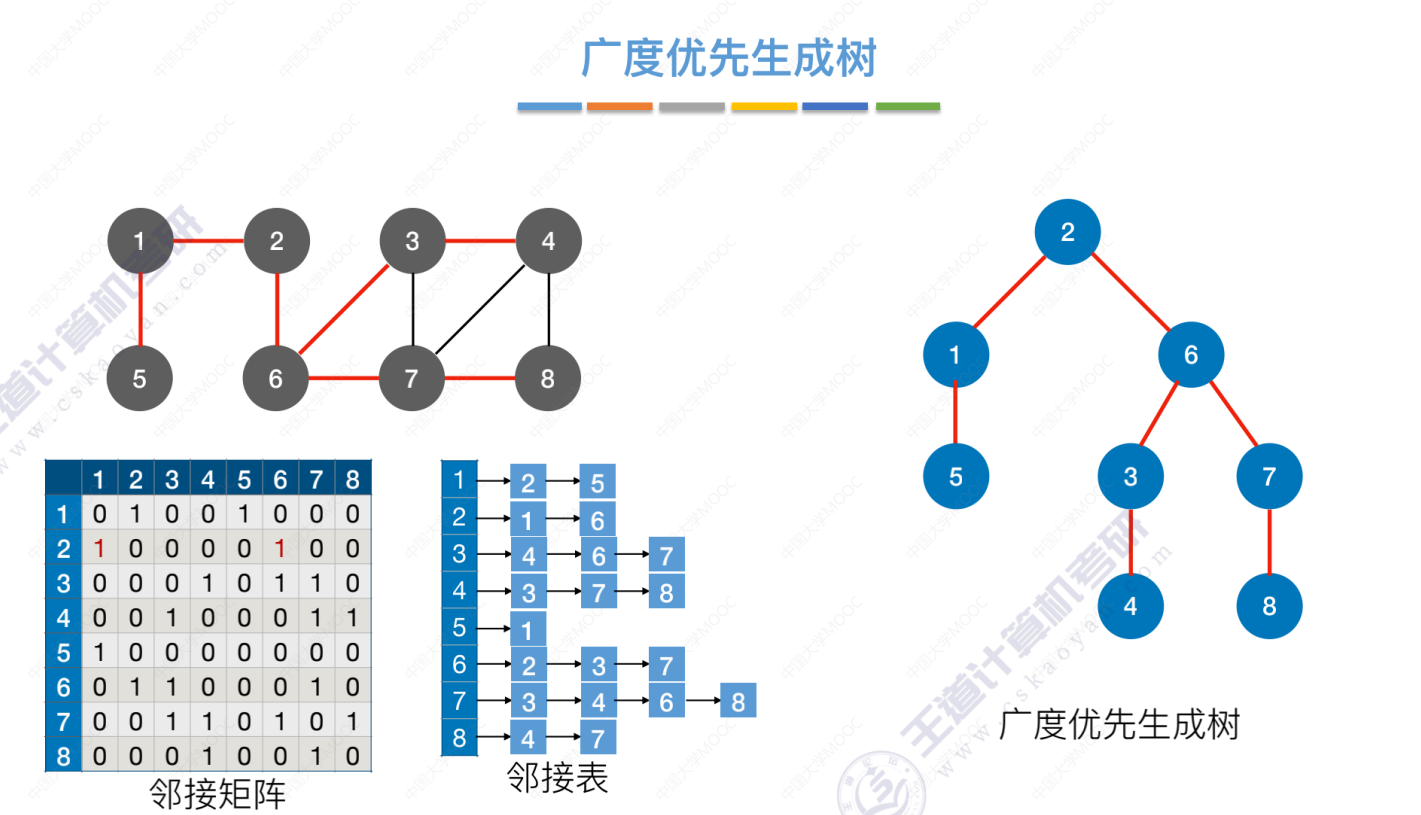
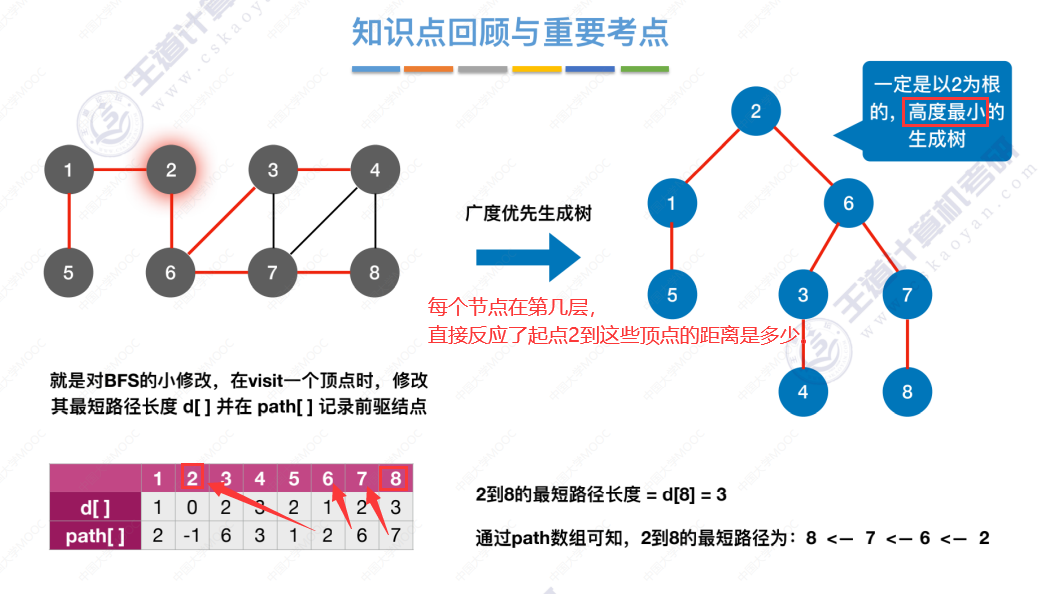
广度优先生成树
标红,当某个顶点第一次被访问时是从哪条边过去的
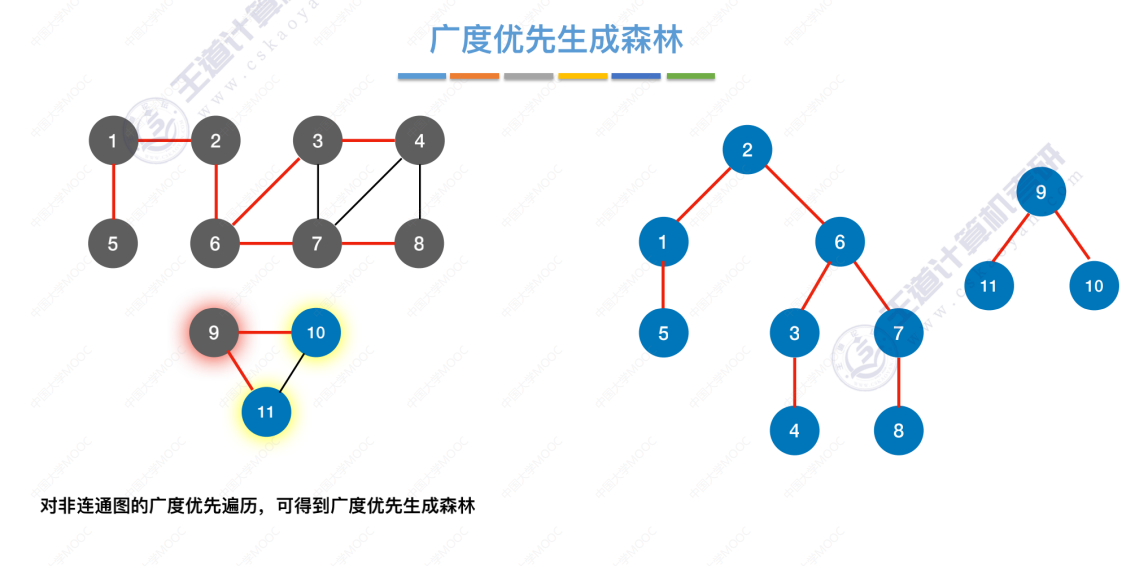
广度优先生成森林
把广度优先生成树放在一起,就是广度优先生成森林。
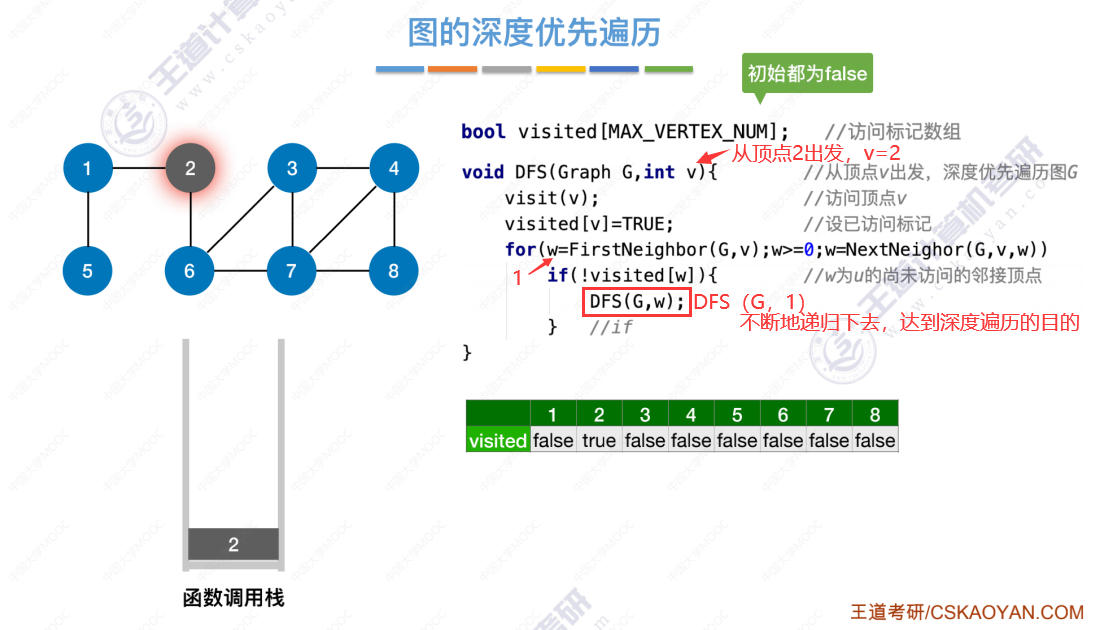
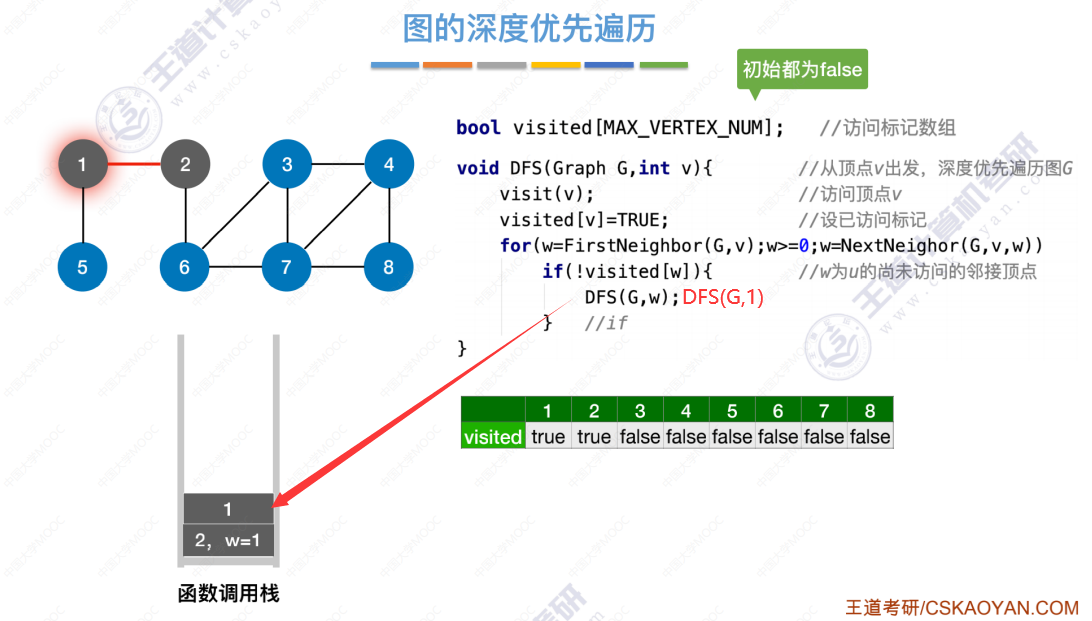
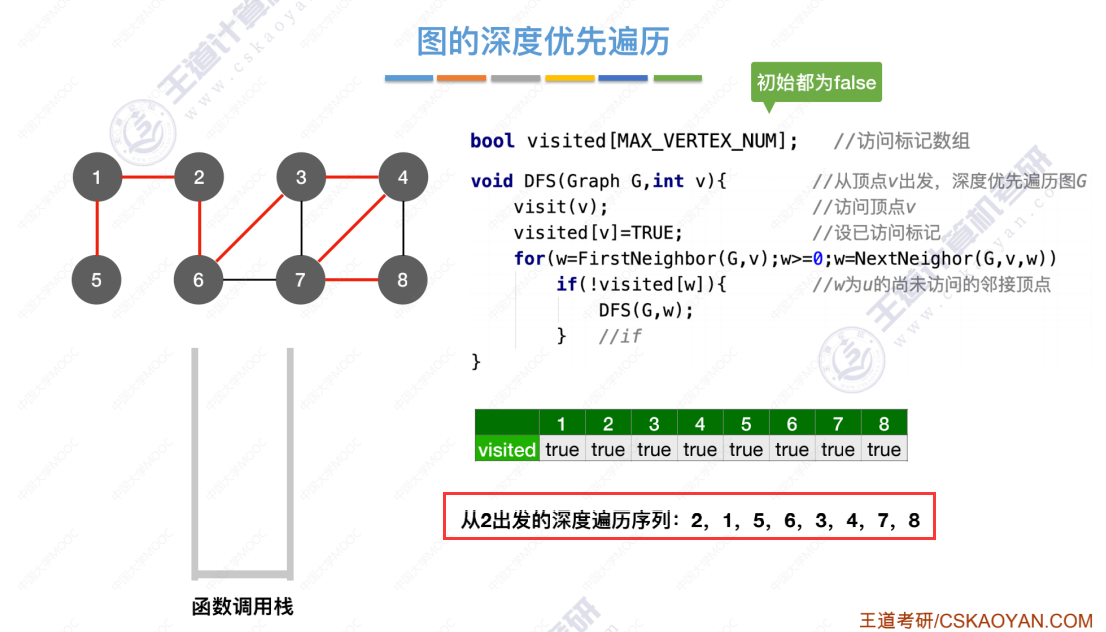
6.3-2 图的深度优先遍历
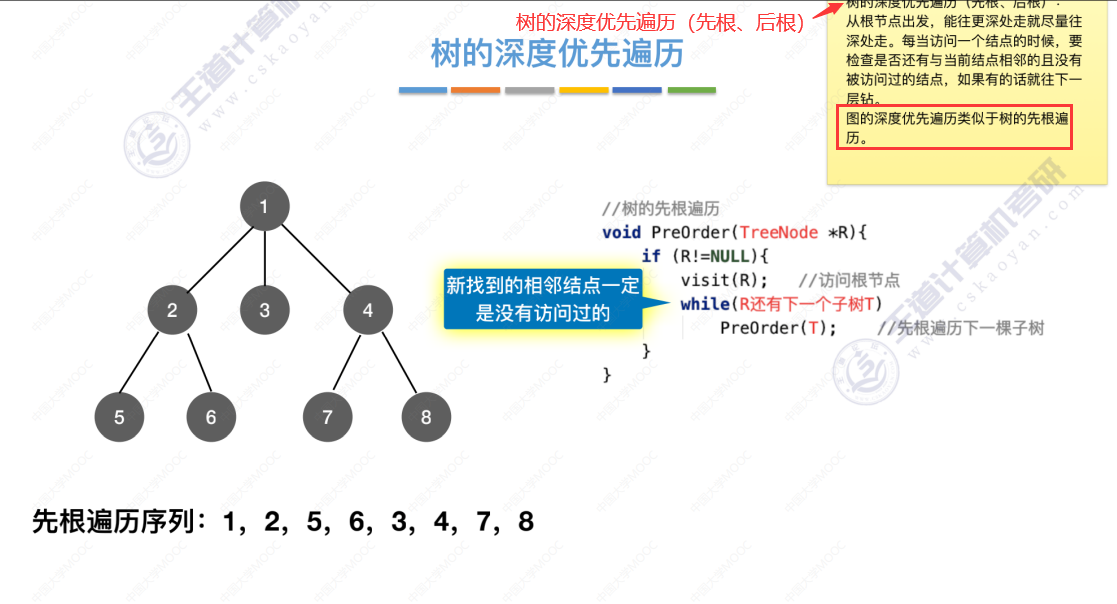
图的深度优先遍历类似于树的先根遍历
图的深度优先遍历代码 引入

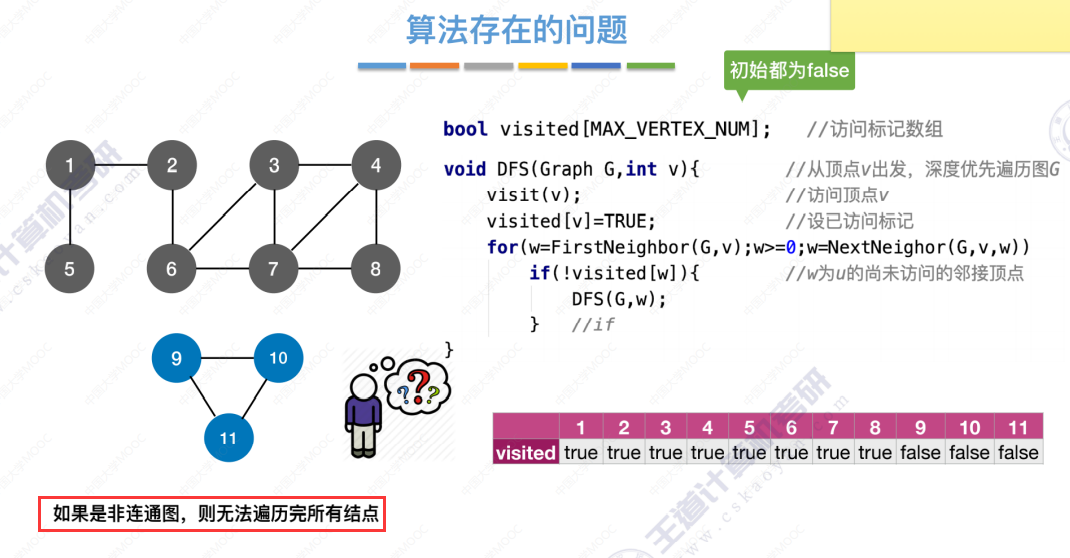
算法存在的问题(和广度优先存在的问题一样,无法处理非连通图,解决办法也一样)
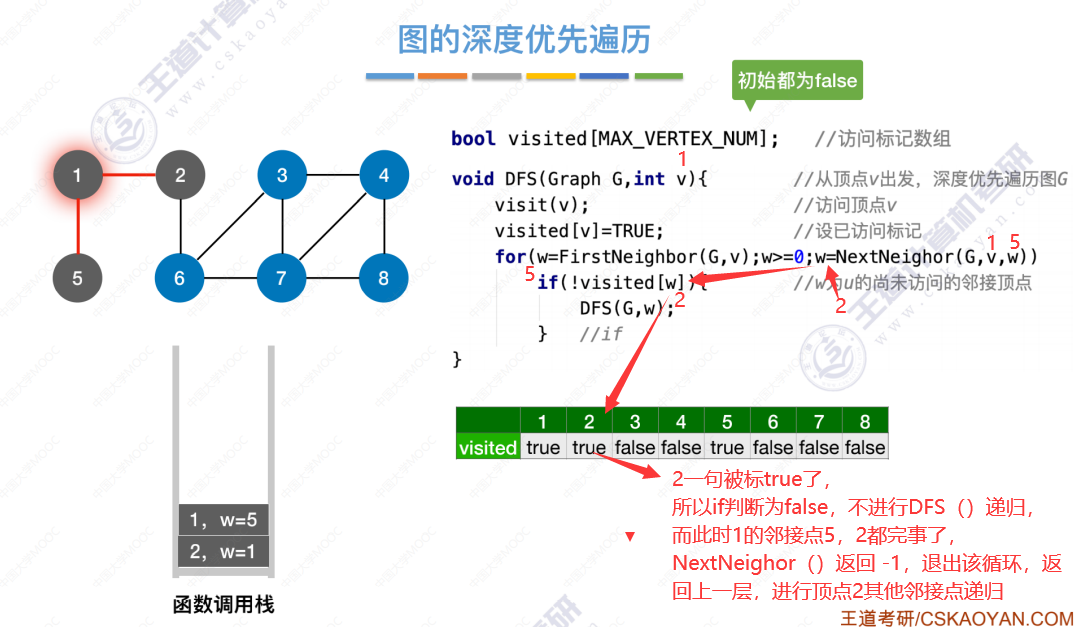
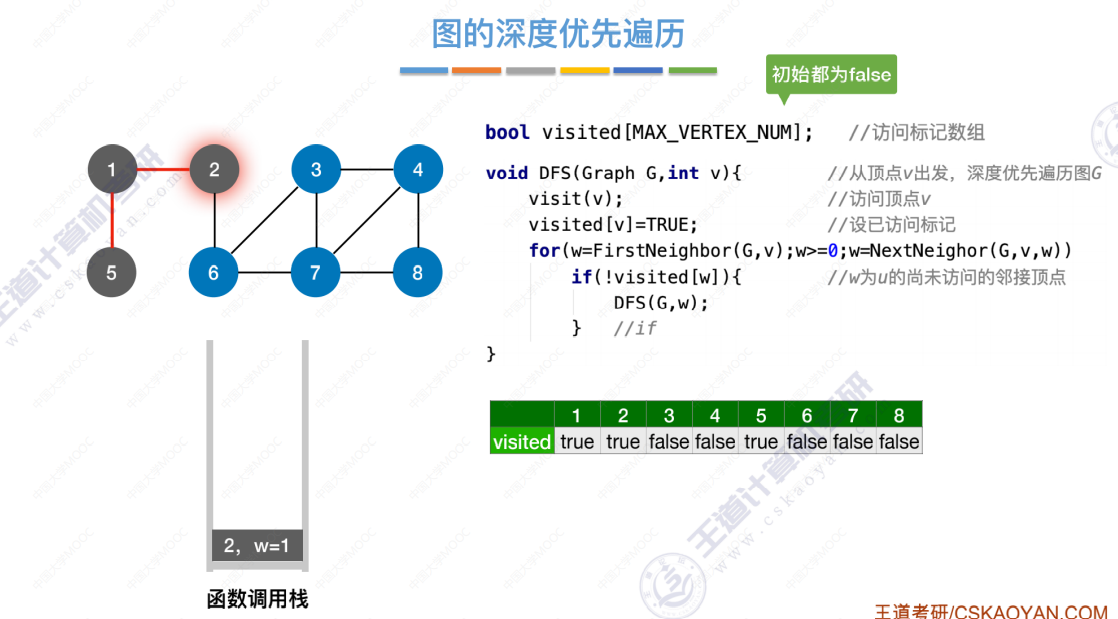
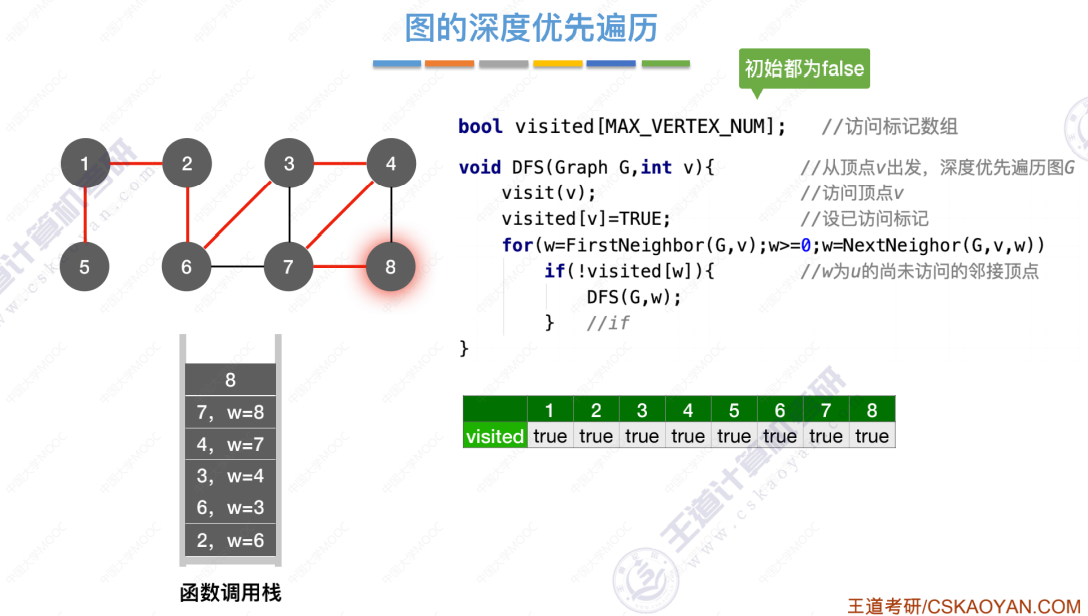
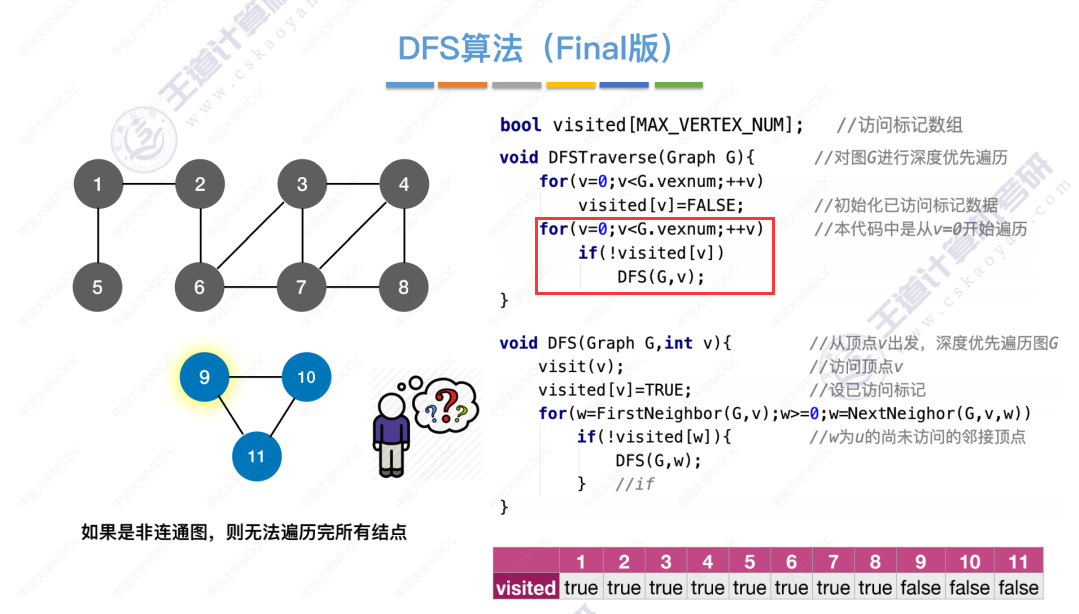
深度优先遍历算法(Depth-First-Search)最终版
算法分析
空间复杂度
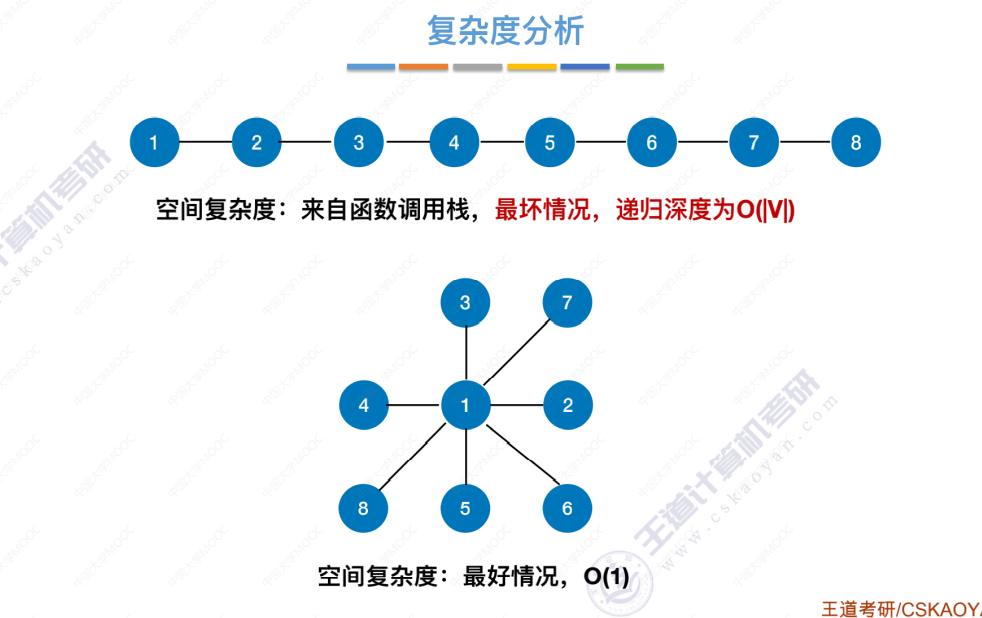
时间复杂度
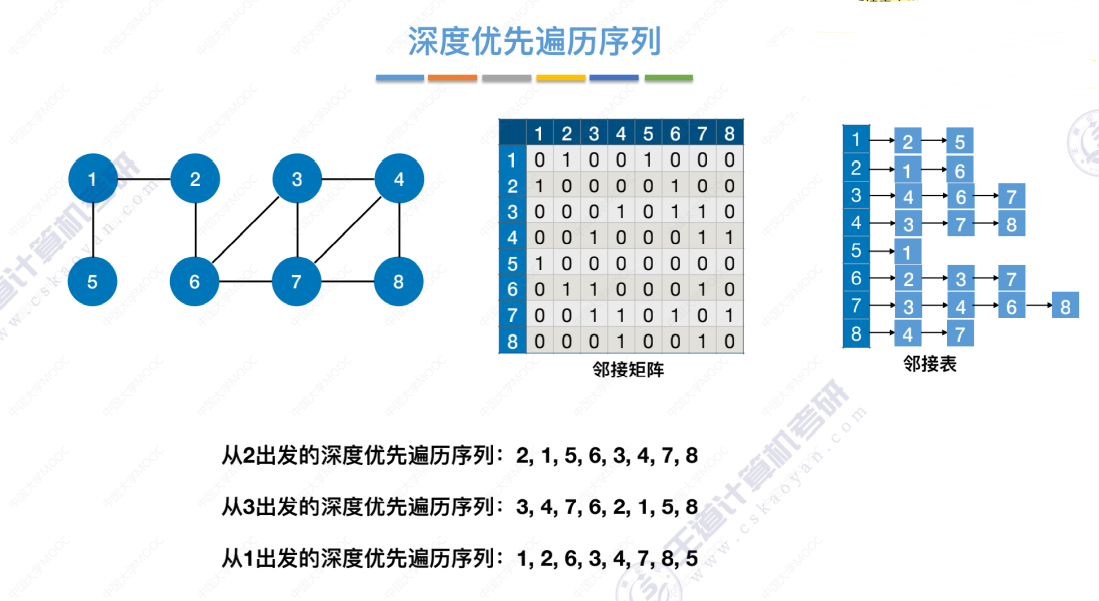
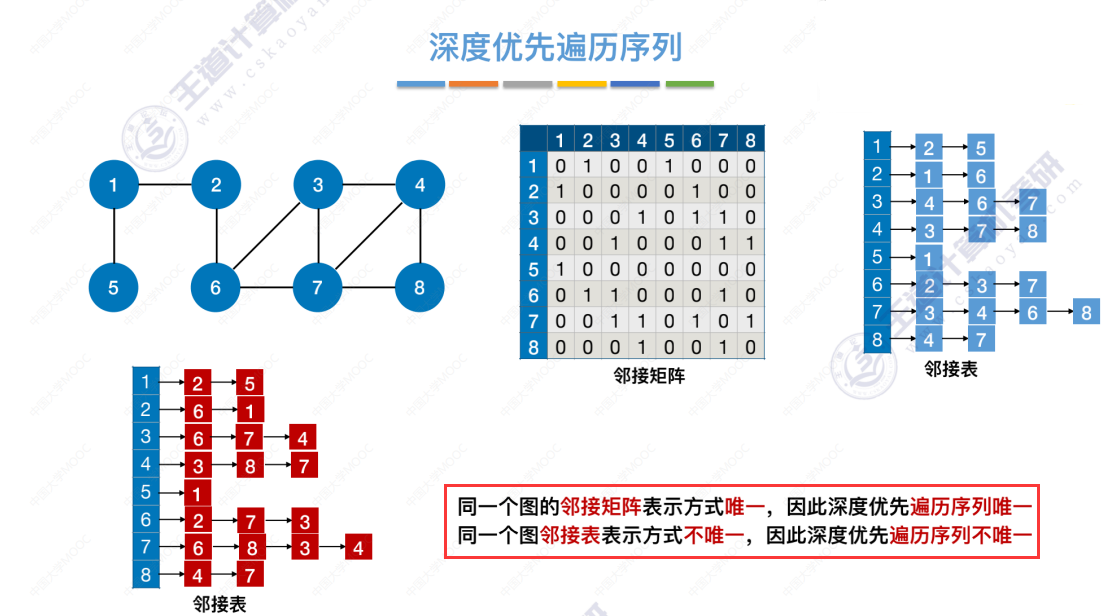
深度优先遍历序列
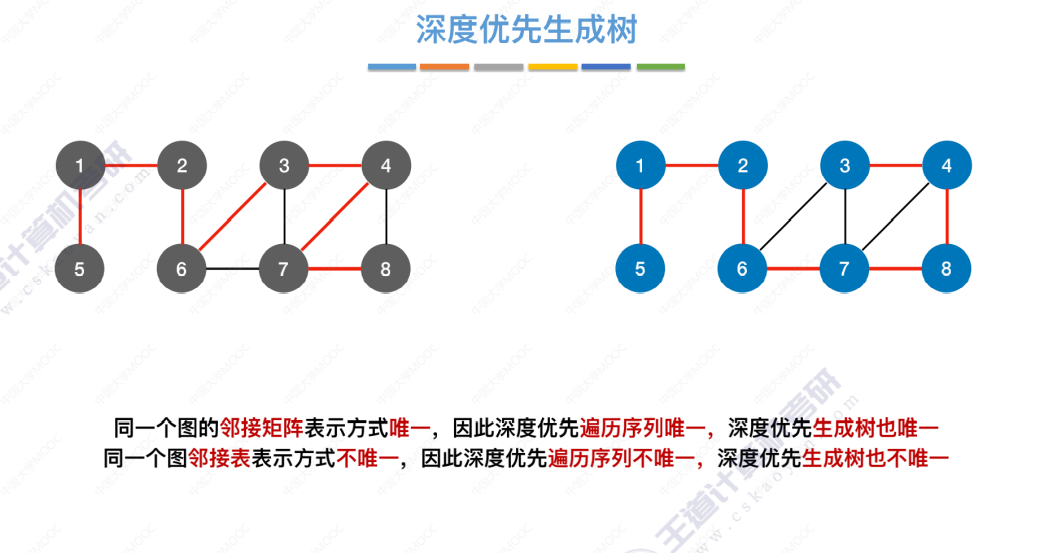
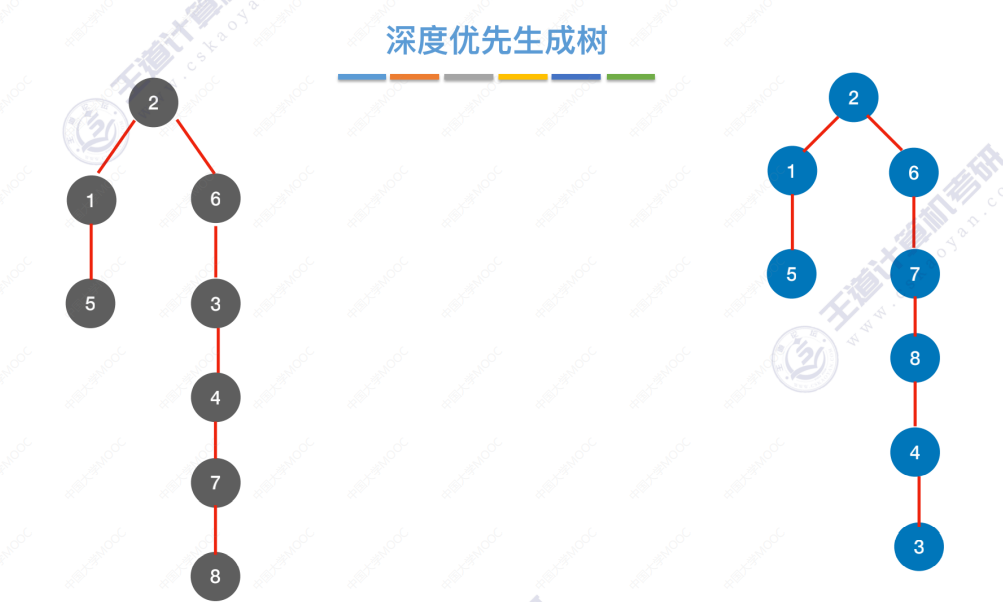
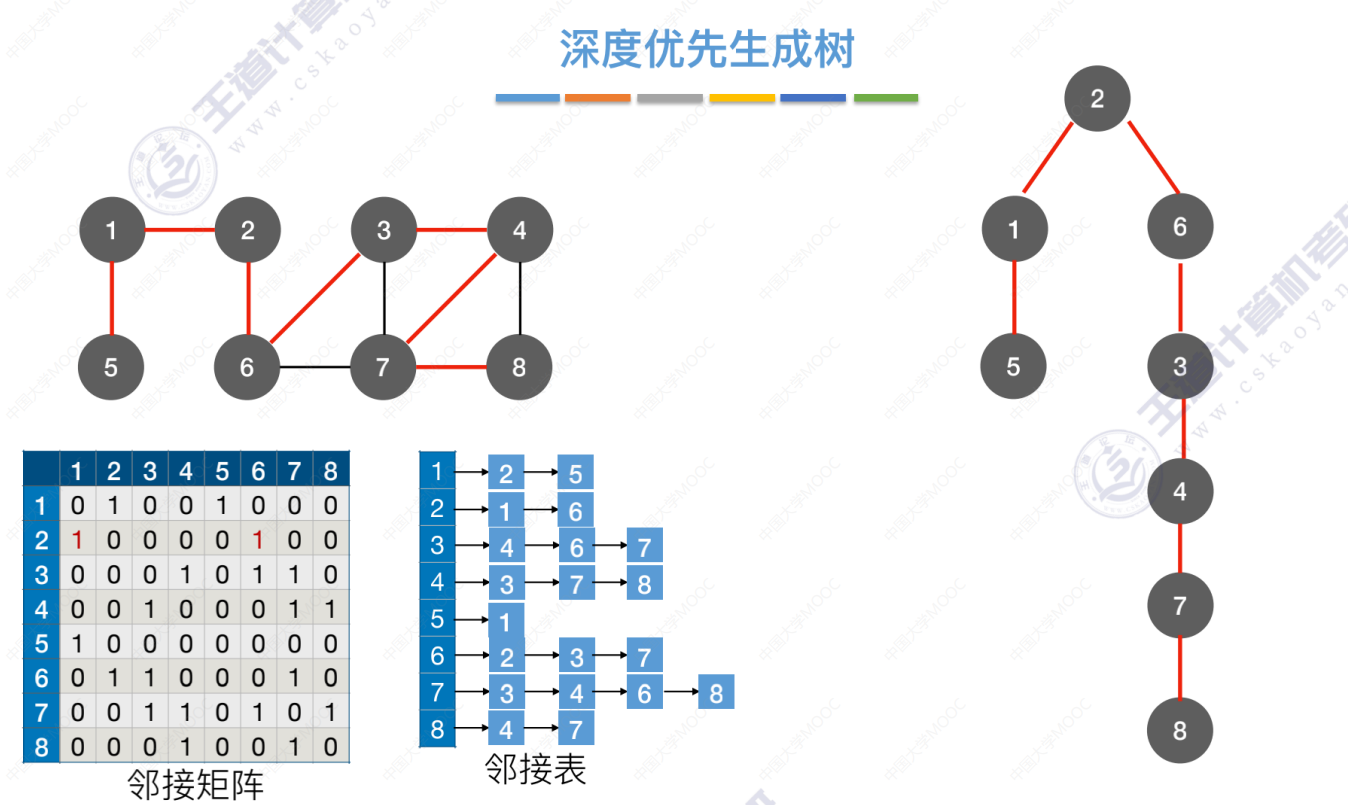
深度优先生成树
标红,当某个顶点第一次被访问时是从哪条边过去的,把标红的边 和 结点单独拿出来,未标红的边去掉,就形成了深度优先生成树。
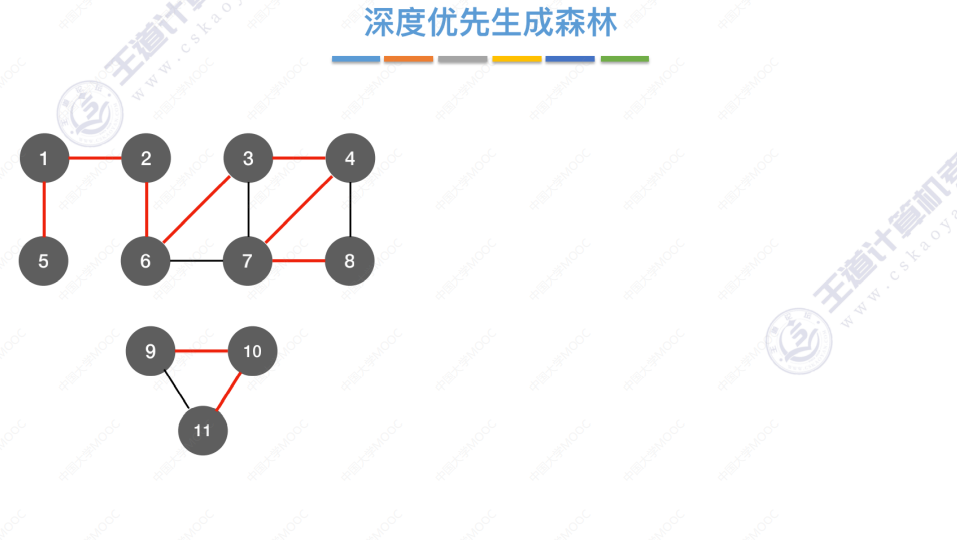
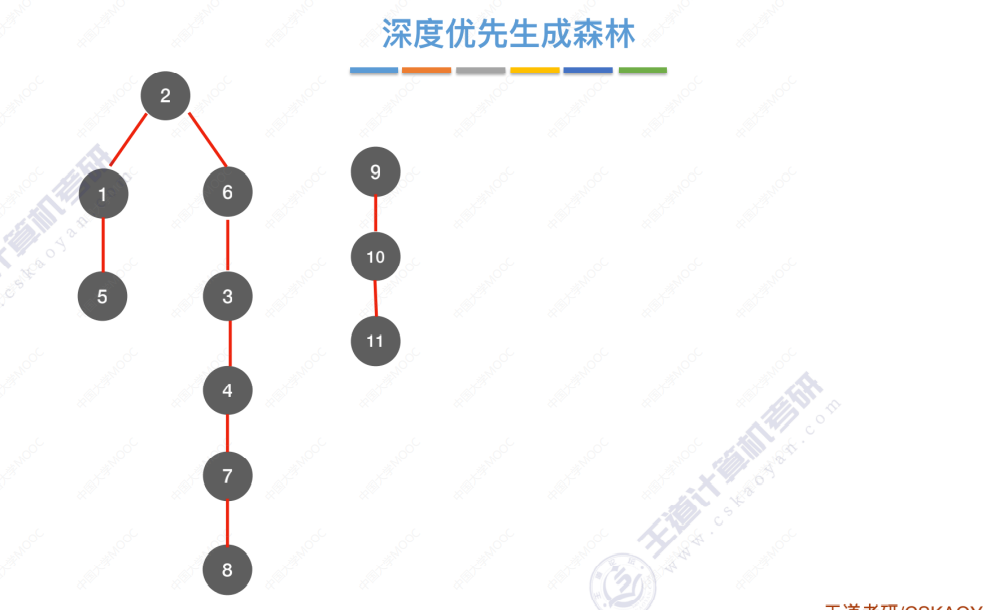
深度优先生成森林
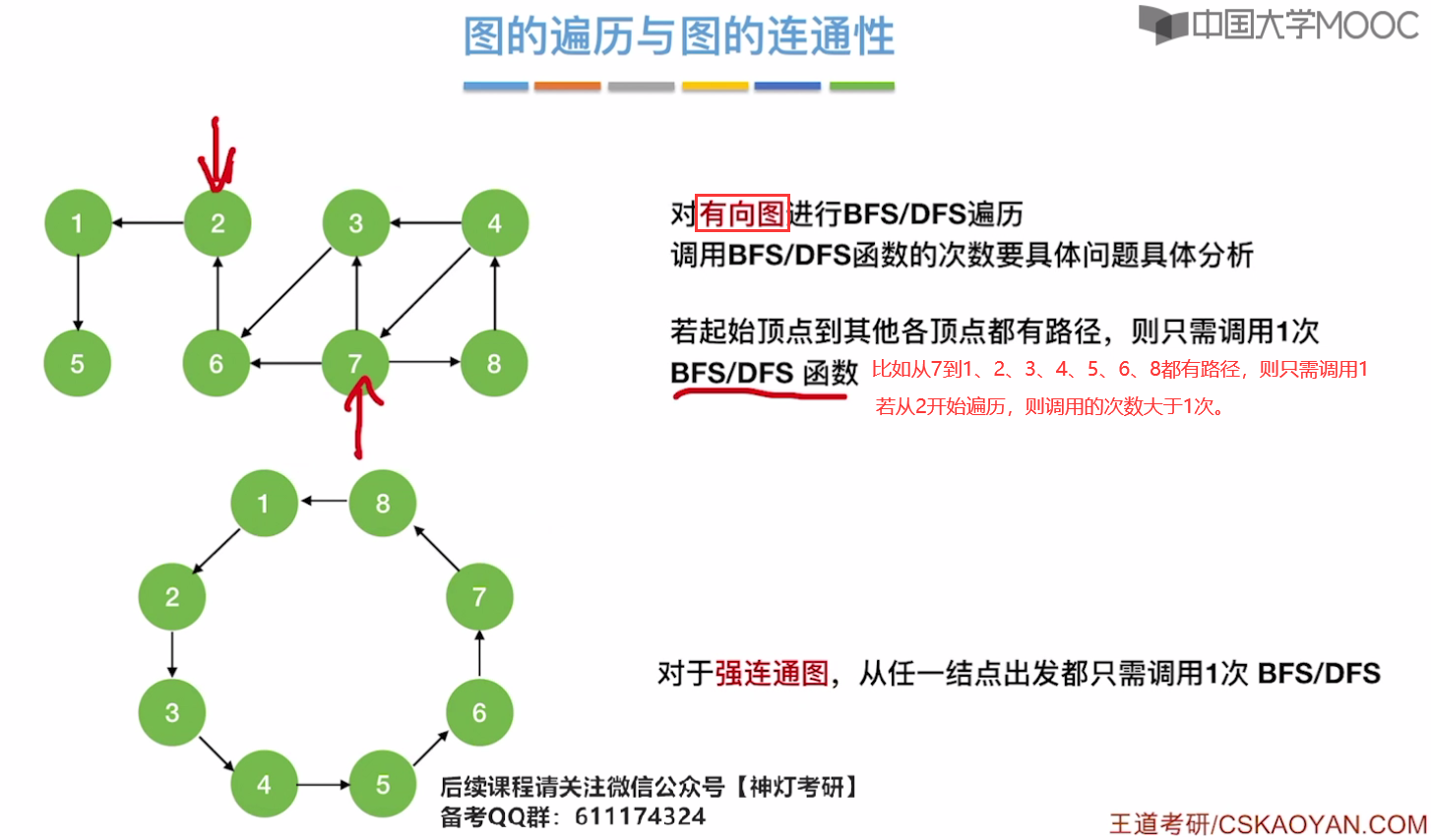
图的遍历和图的连通性
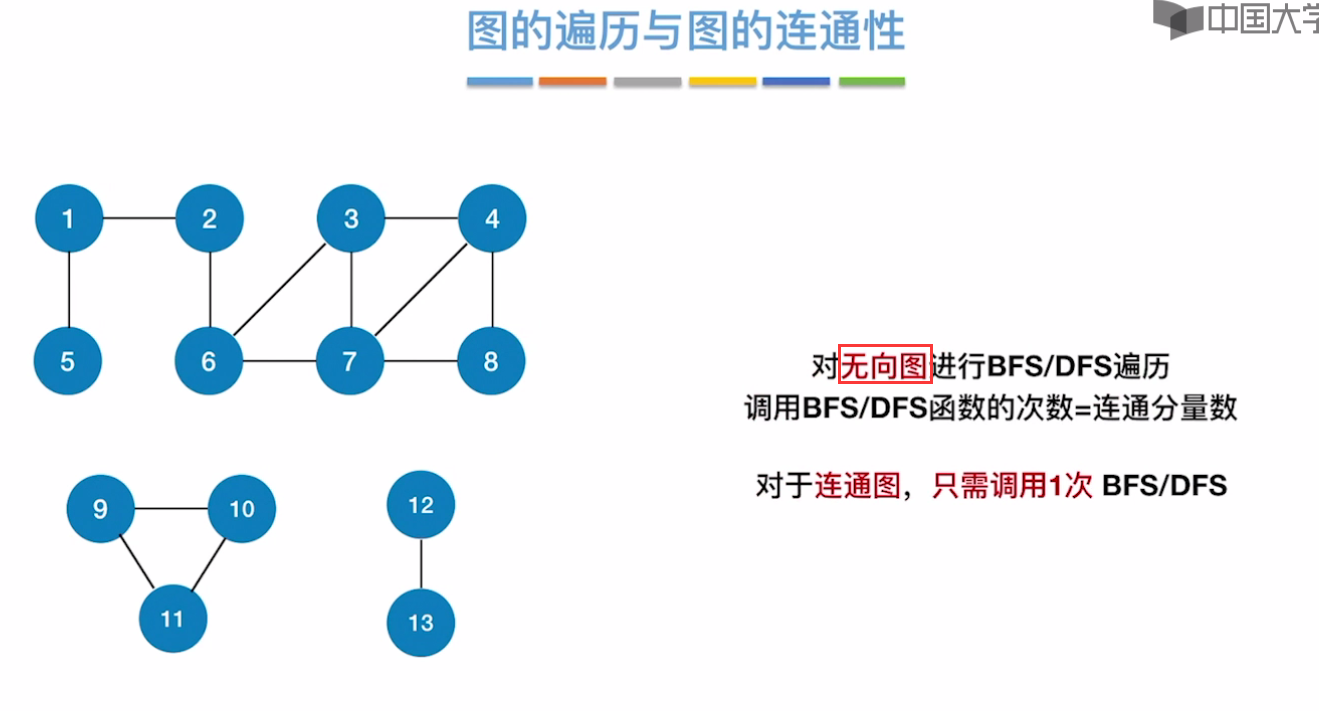
下图,如果7仅仅能和邻接顶点6、3、8有路径而和其余顶点5、1、2、4没有路径,那么调用次数也是要多于1次的。
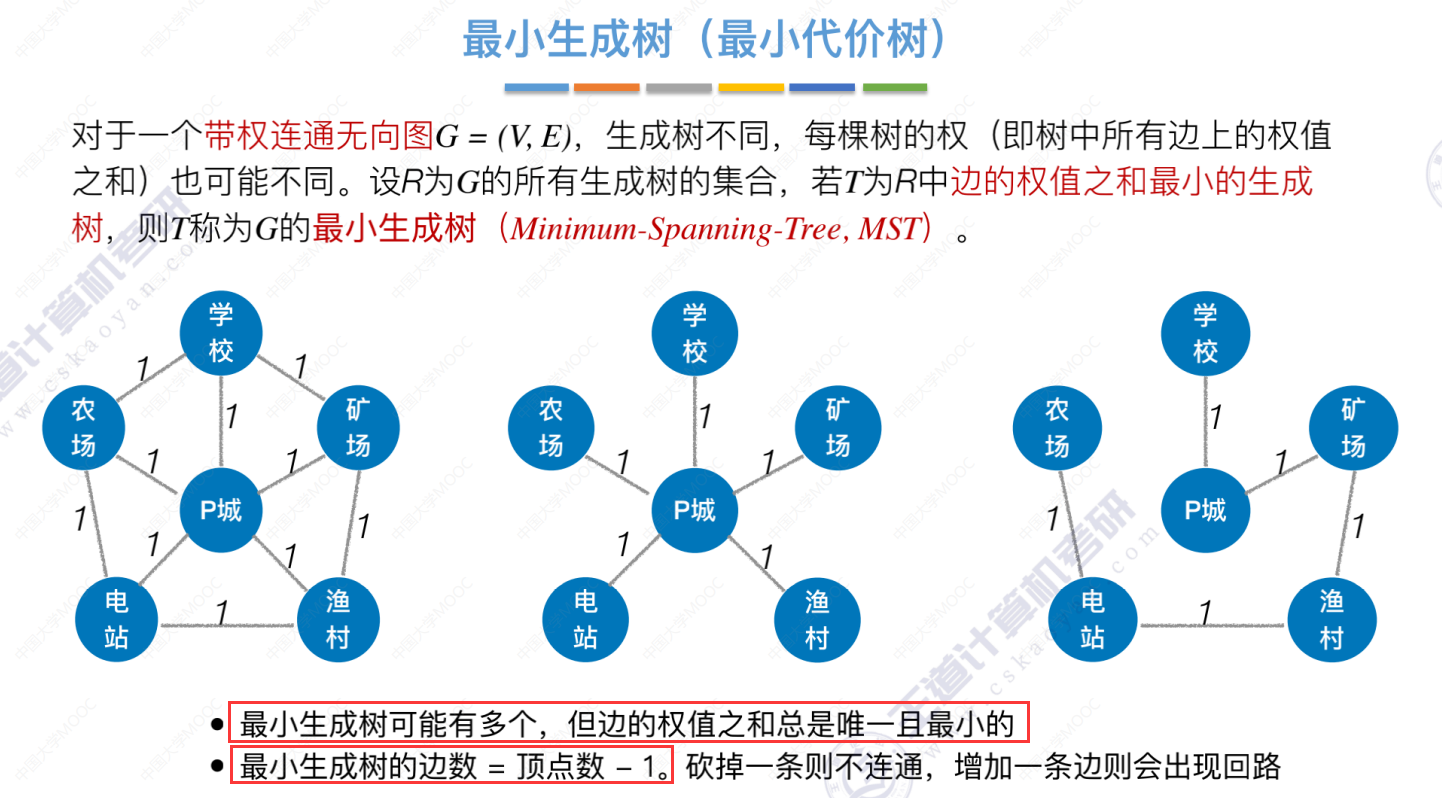
6.4-1 最小生成树
生成树是什么
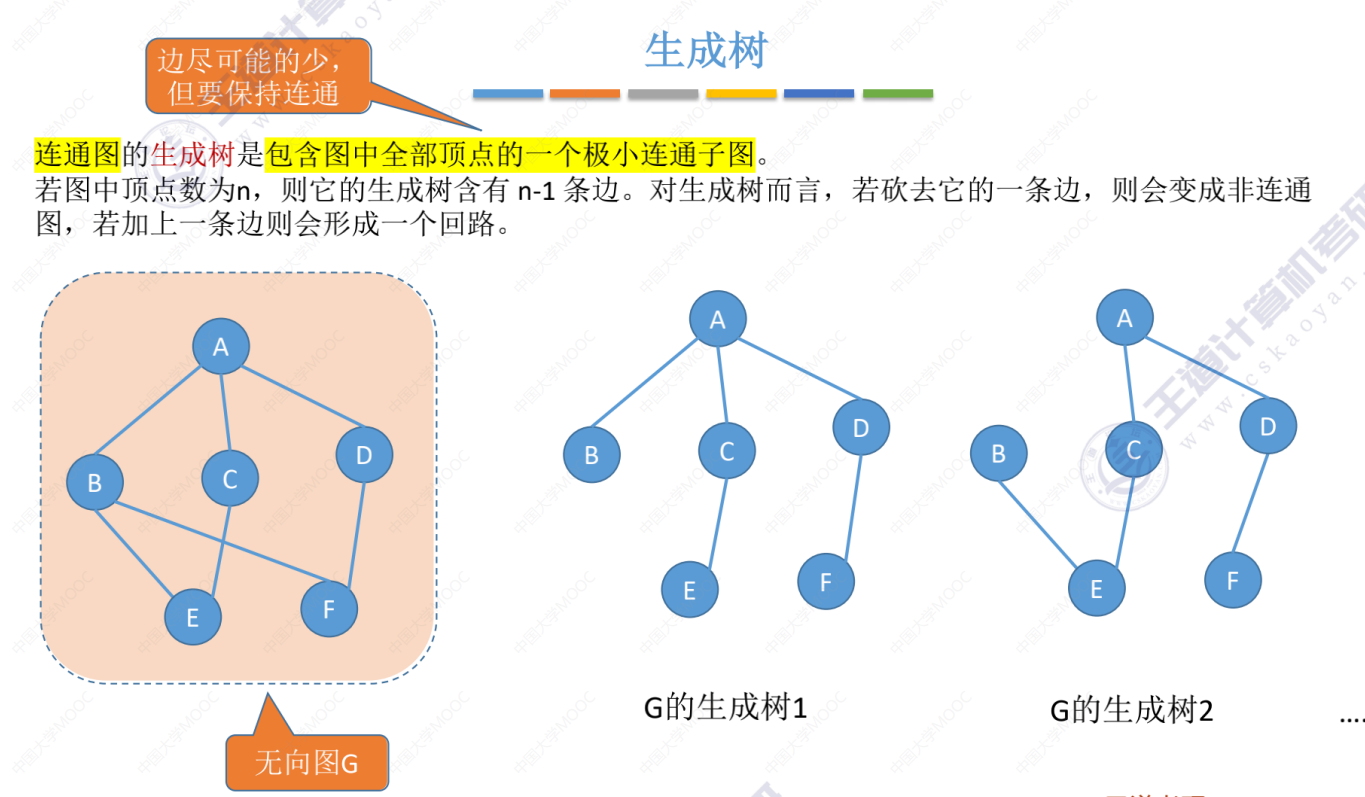
最小生成树
带权、连通、无向
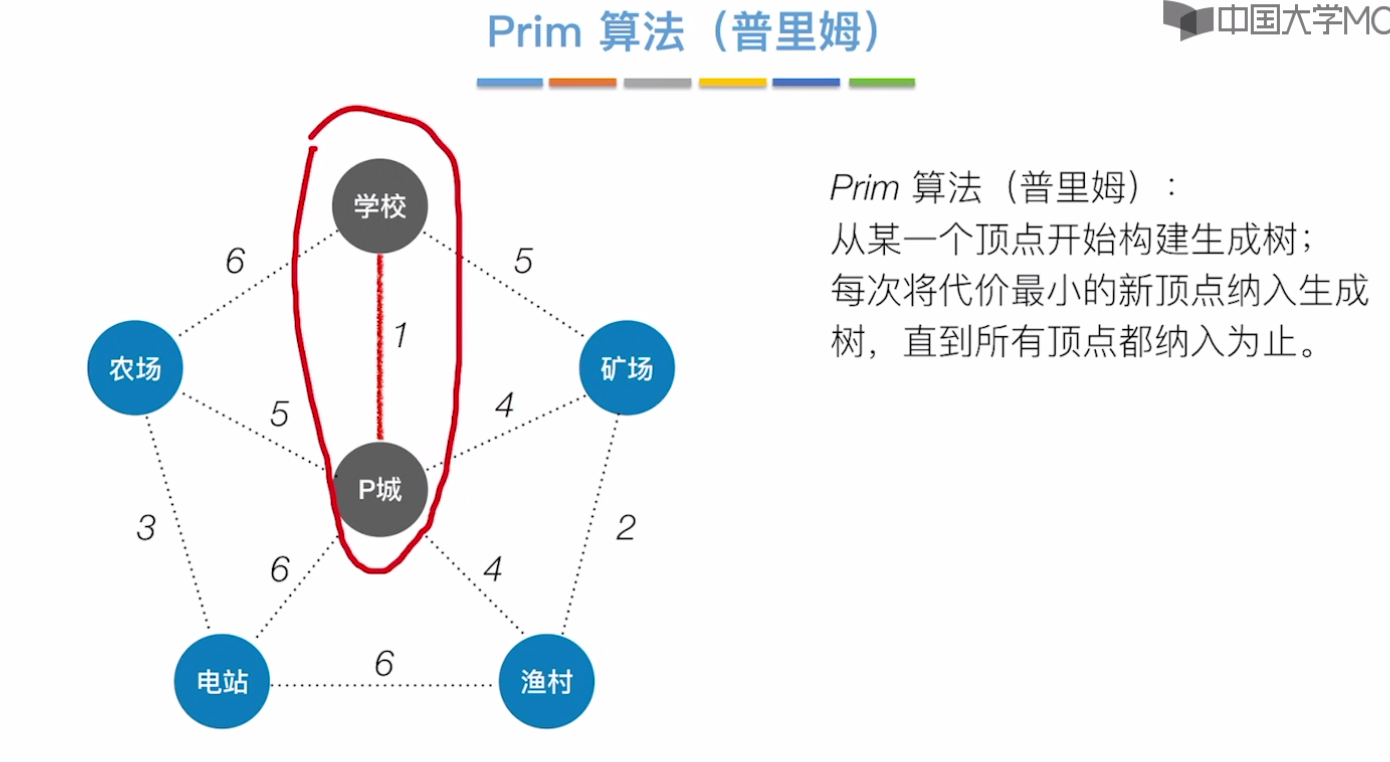
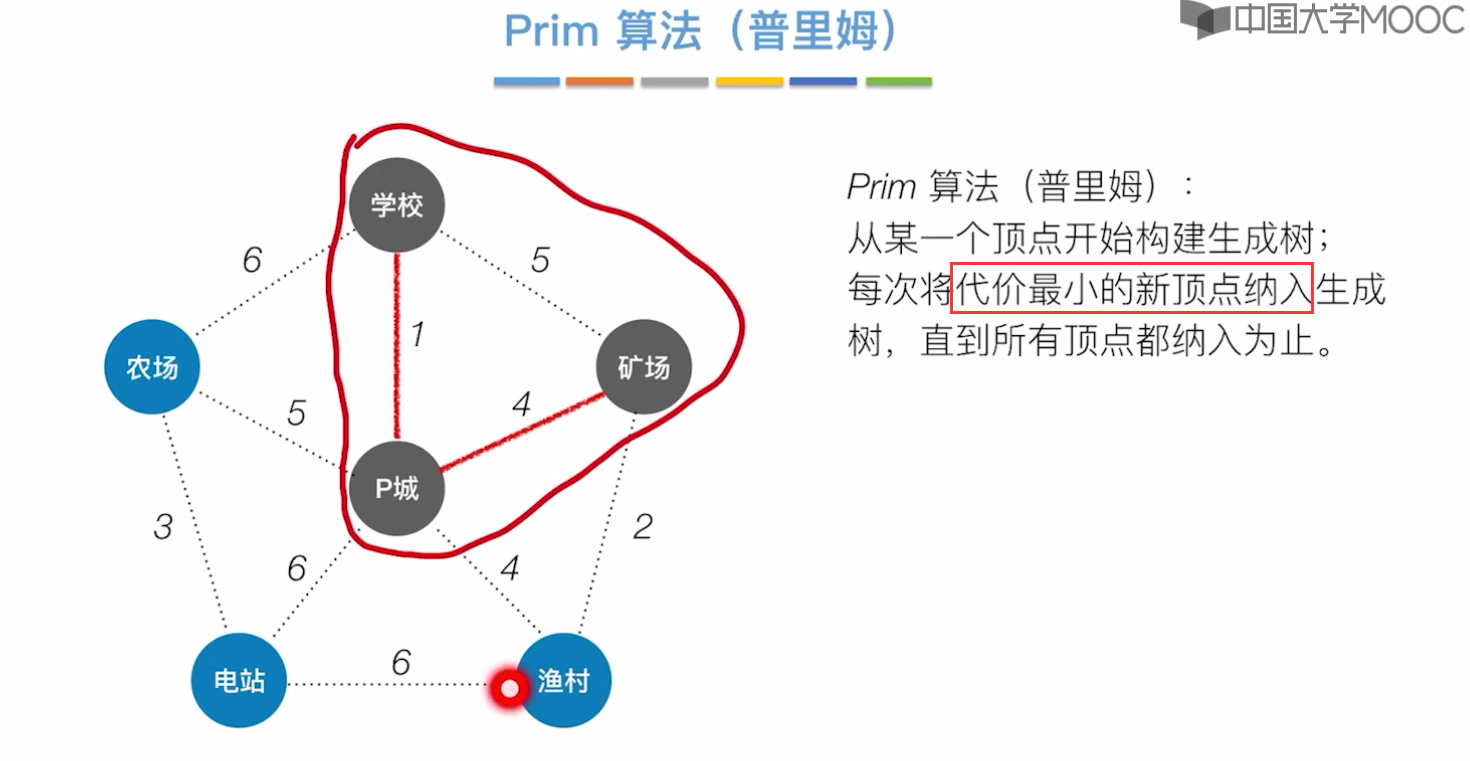
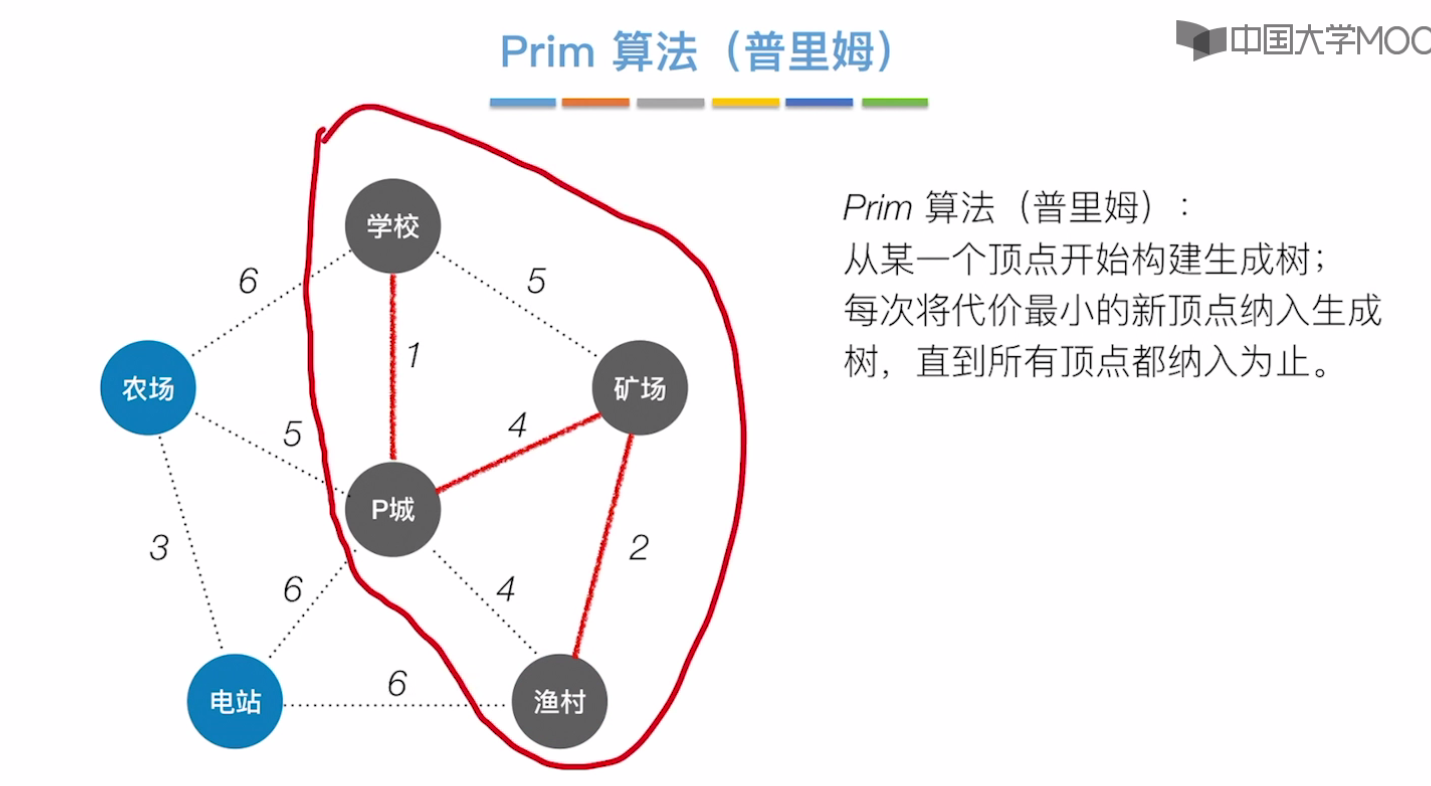
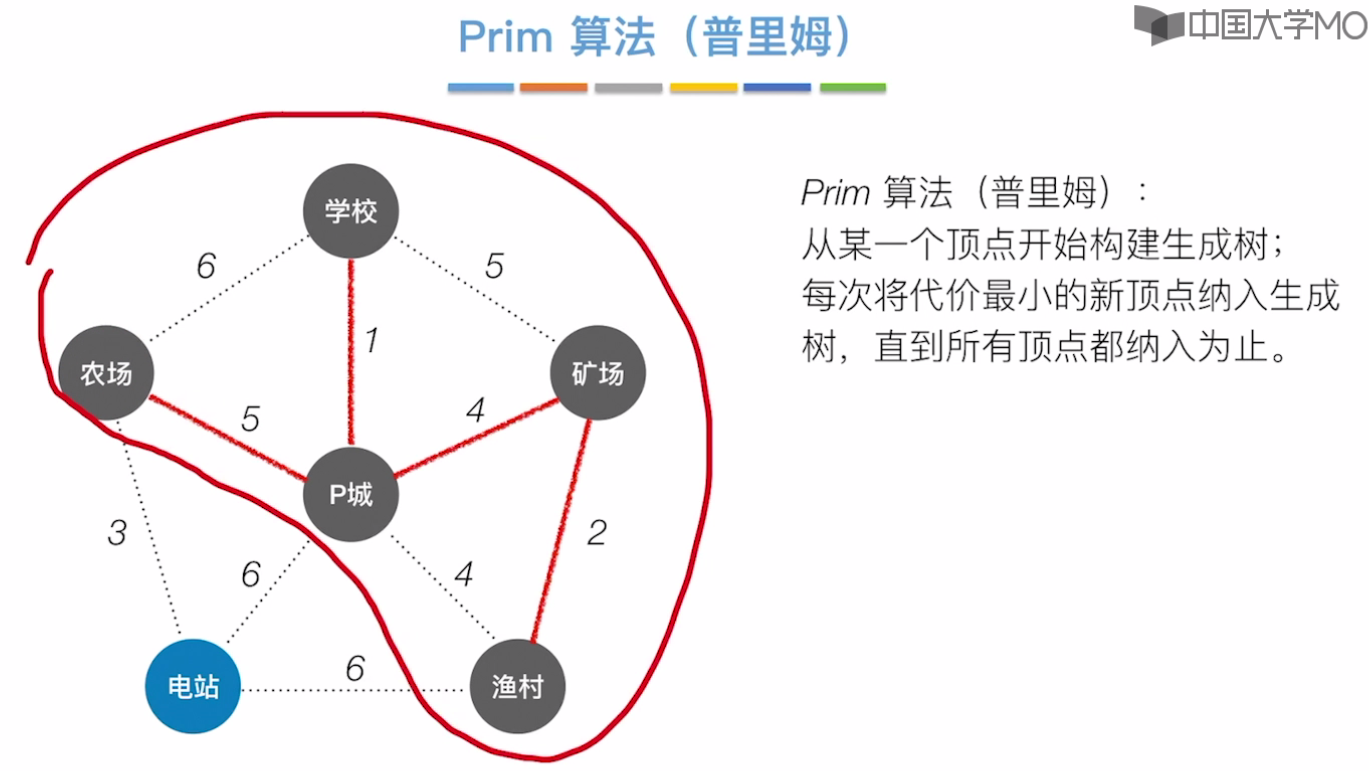
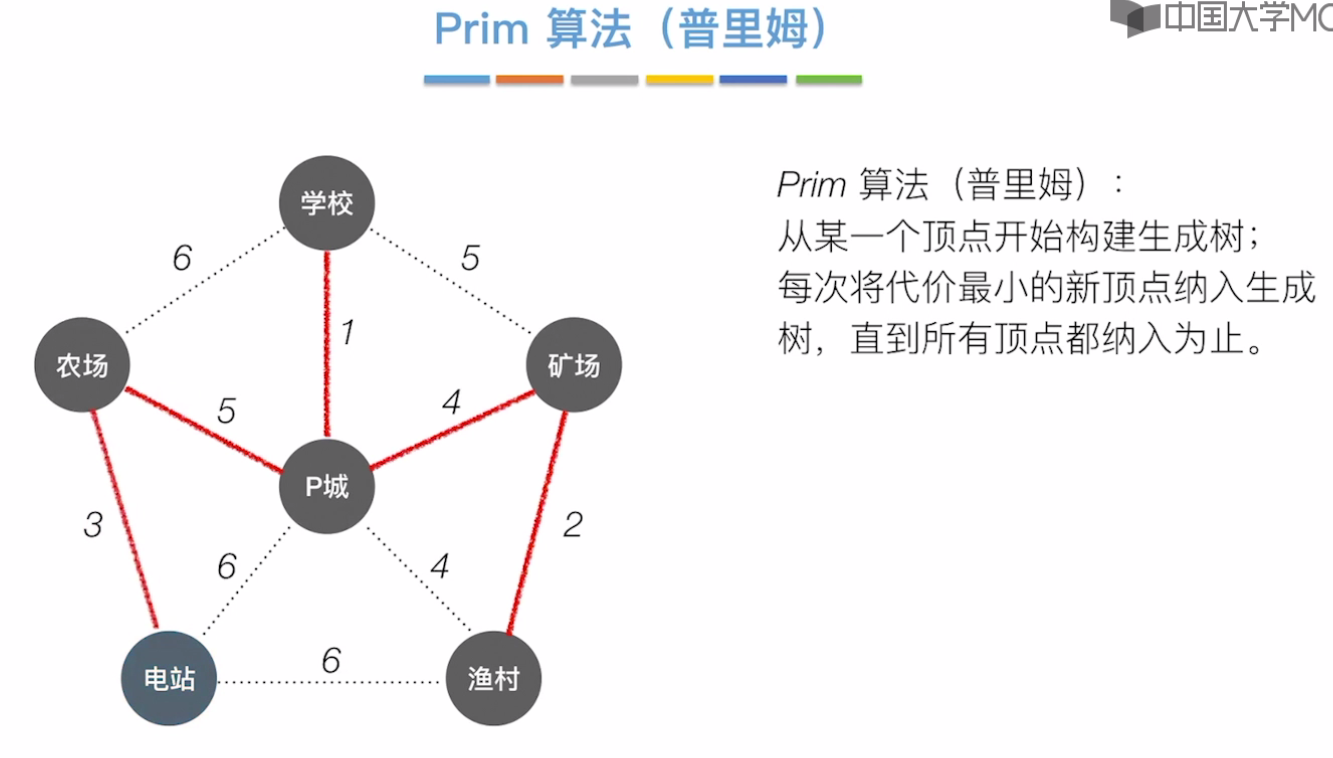
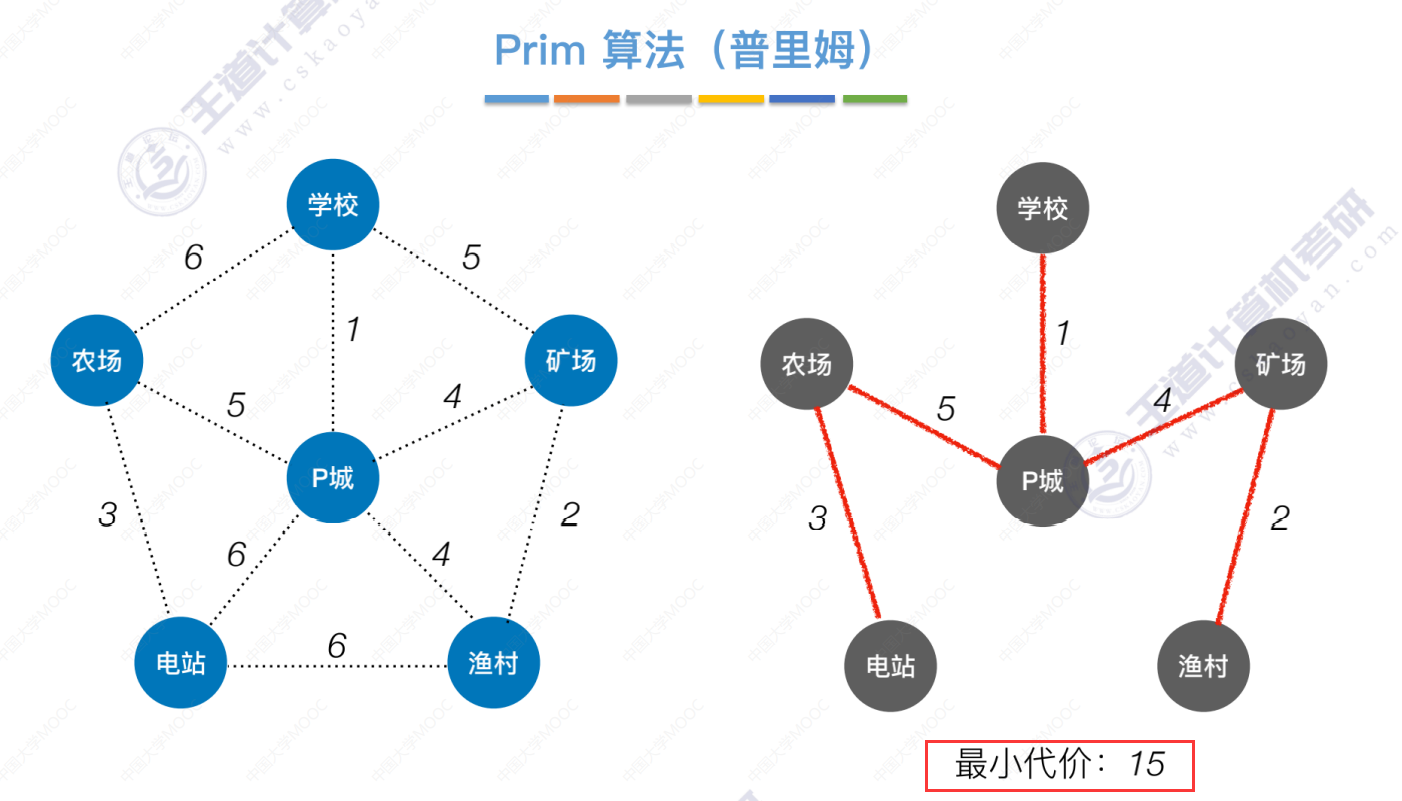
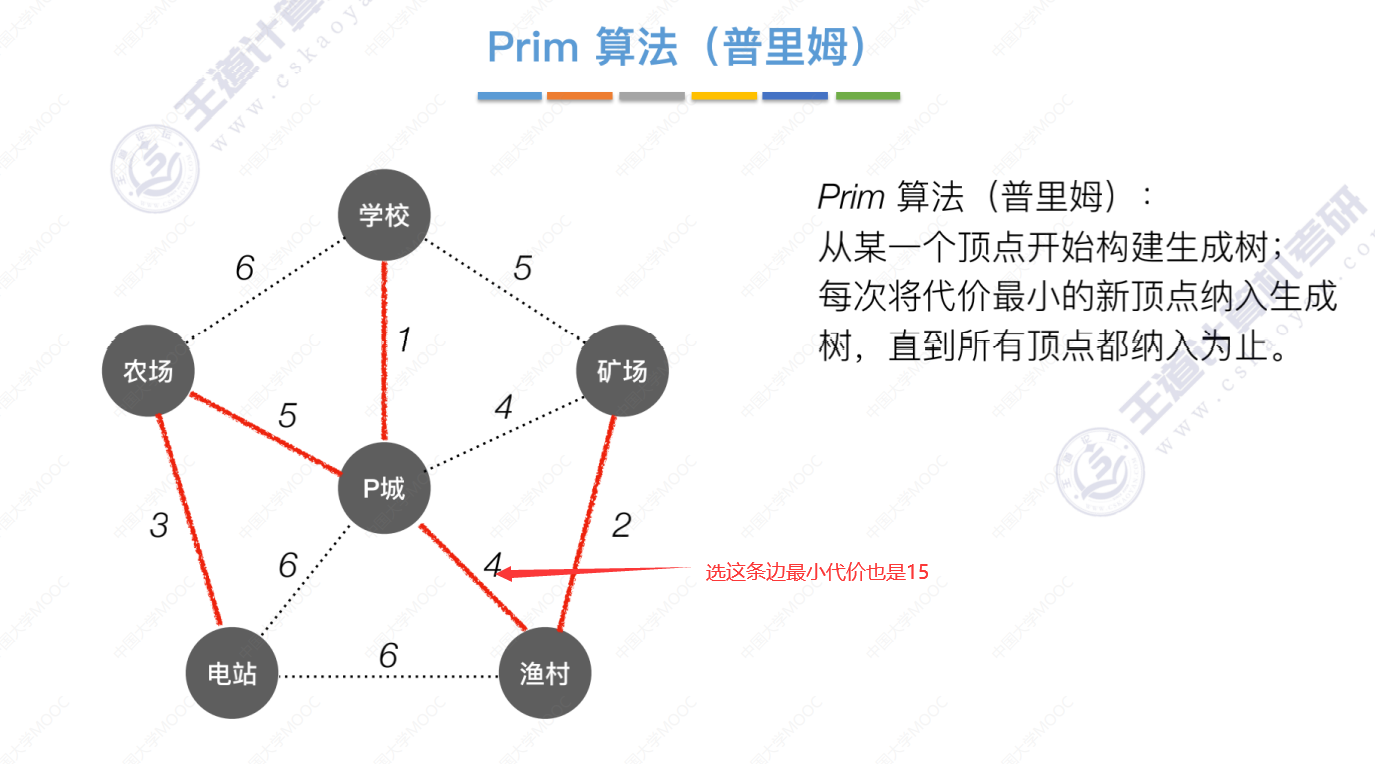
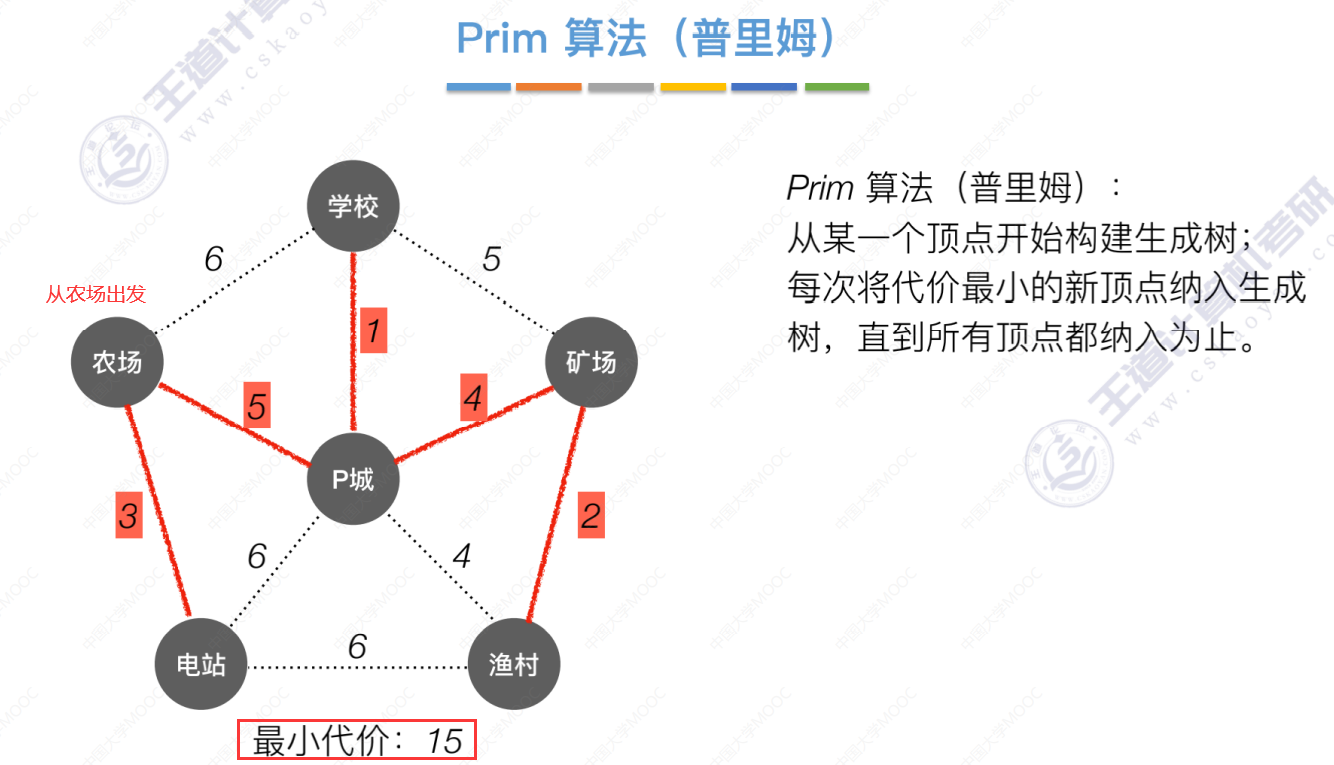
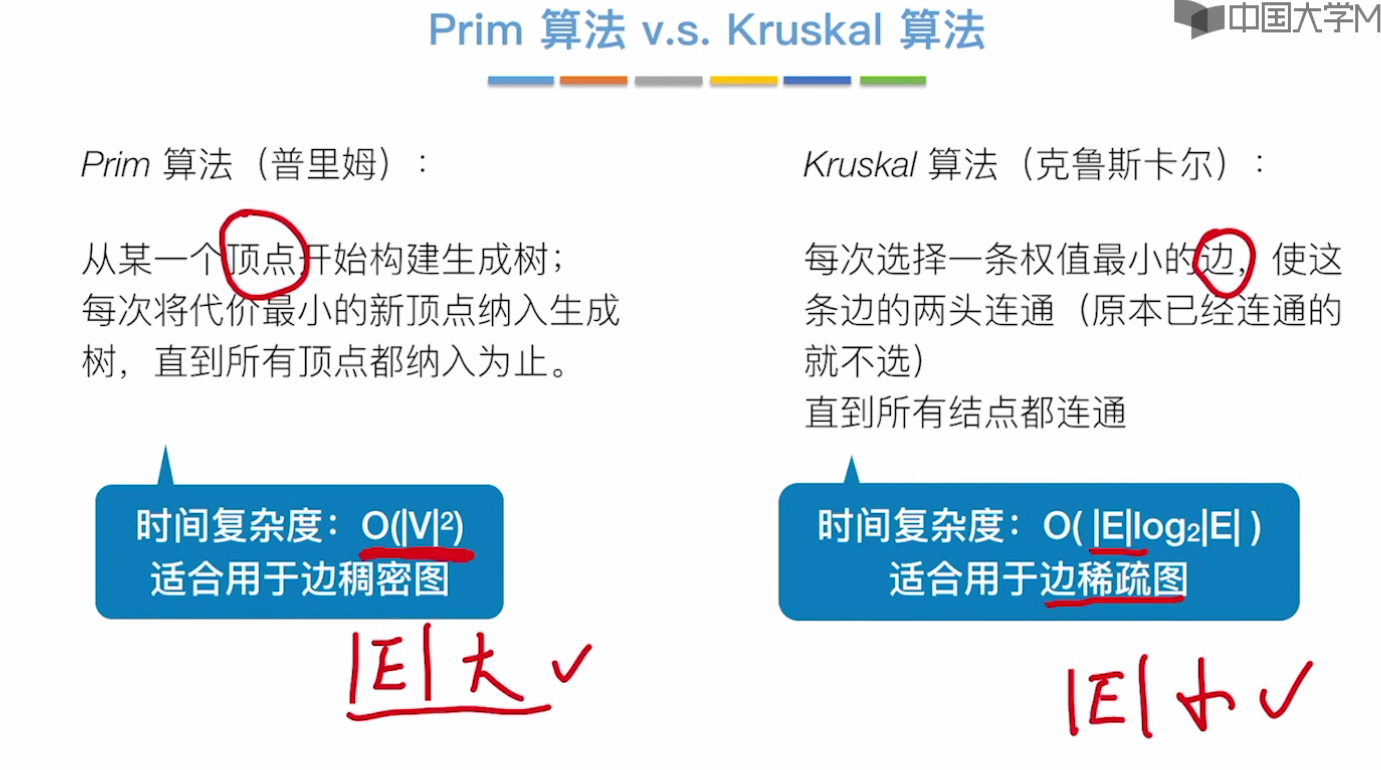
Prim算法
从p城出发
从农场出发
Kruskal算法
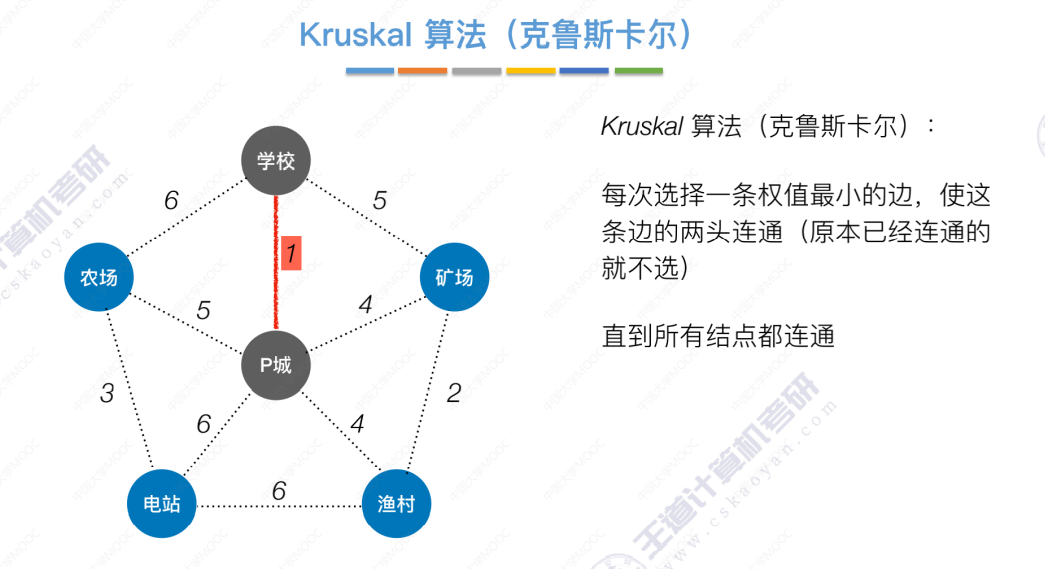
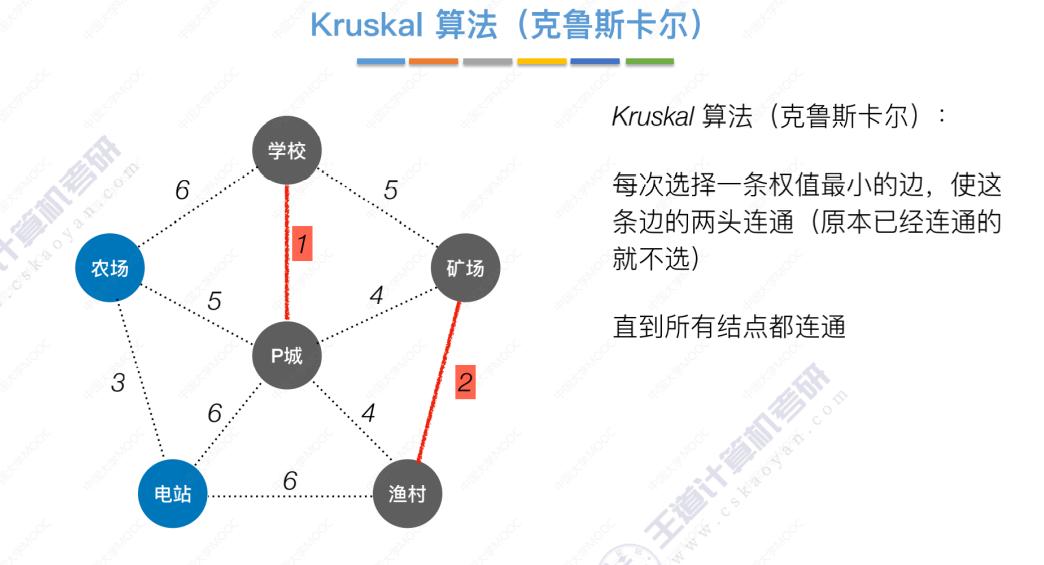
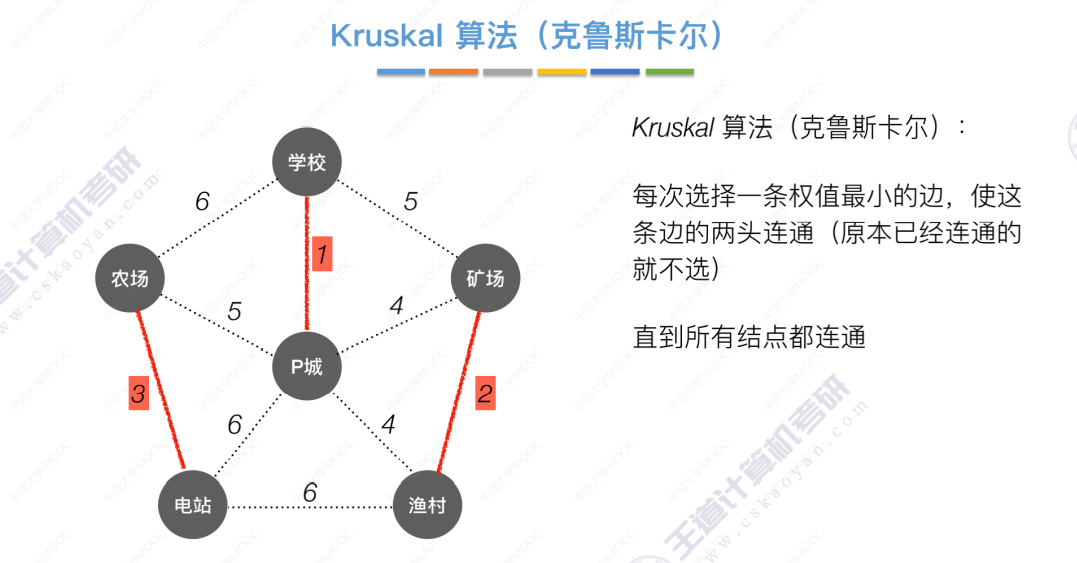
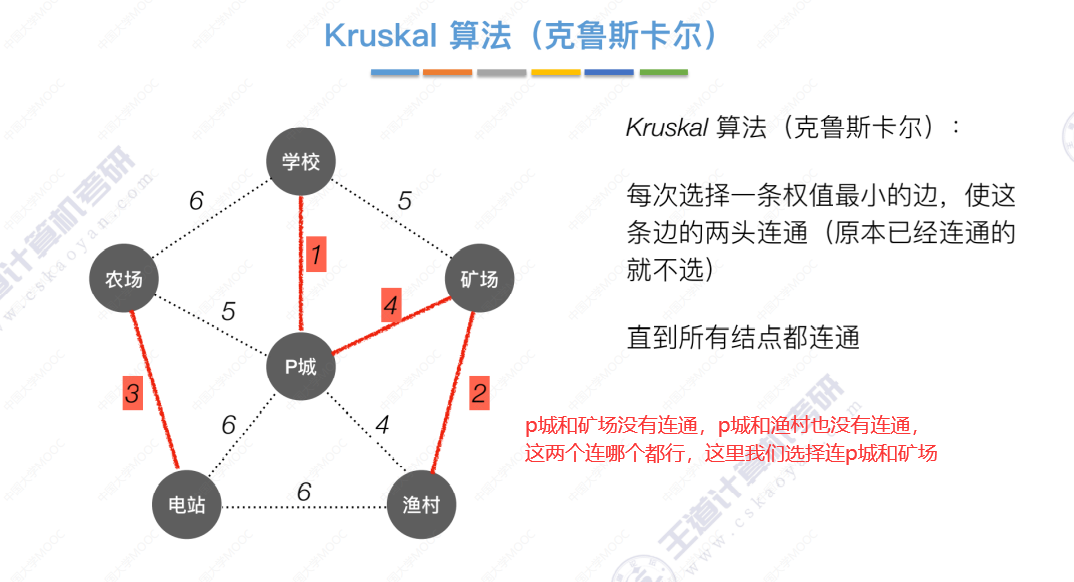
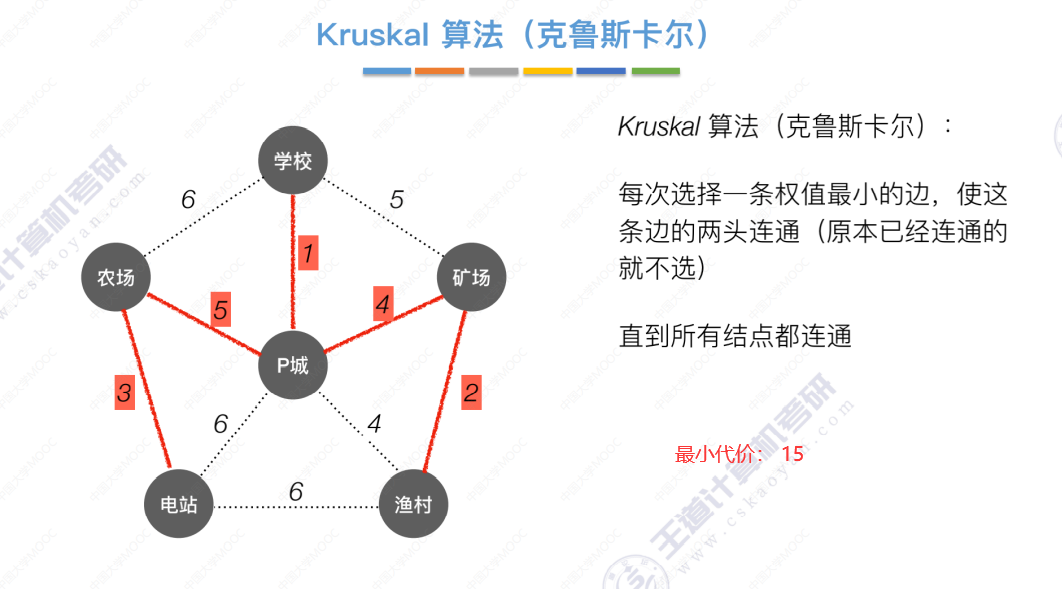
直到所有结点都连通,算法结束。Prim算法和Kruskal算法对比
6.4-2 最短路径问题_BFS算法
最短路径问题介绍
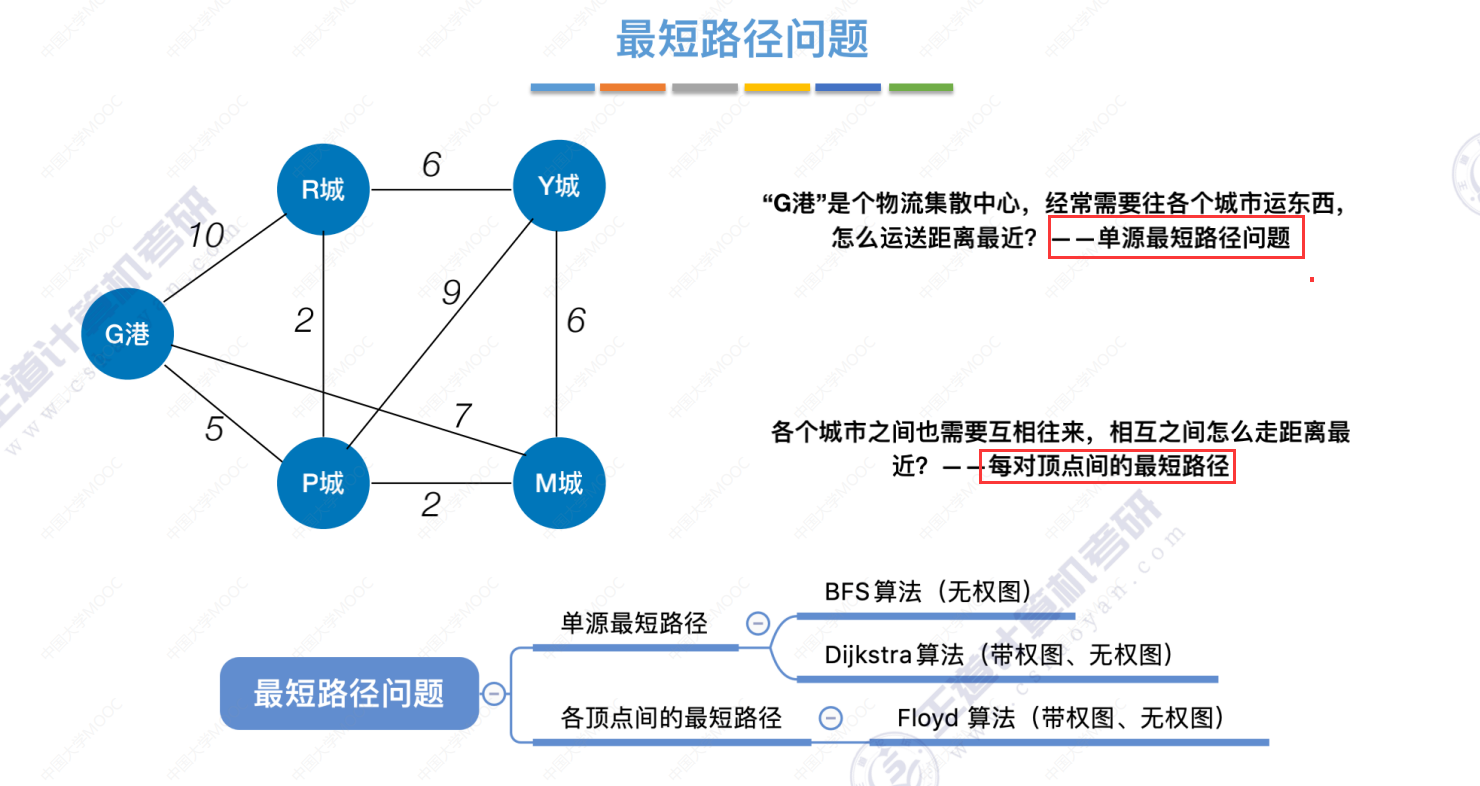
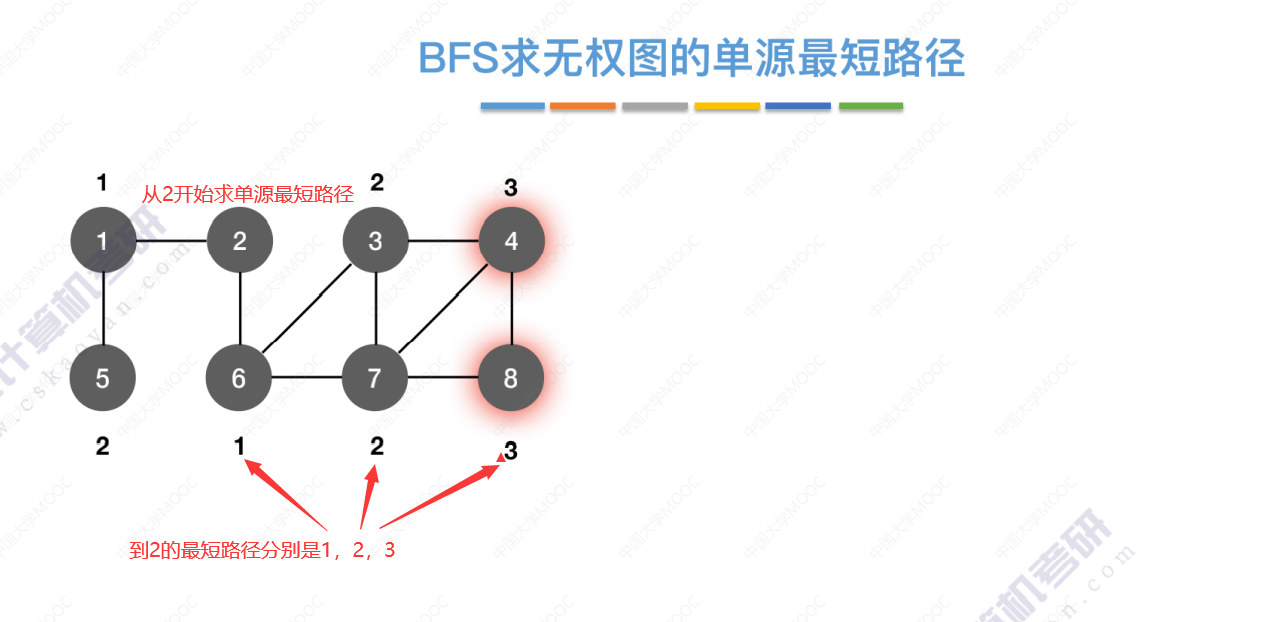
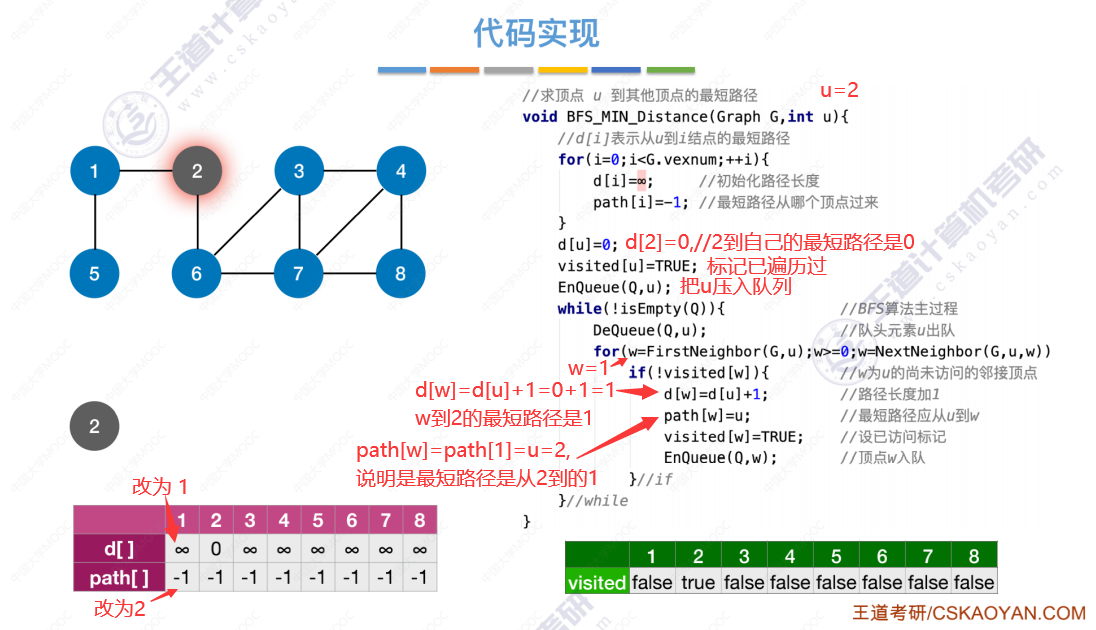
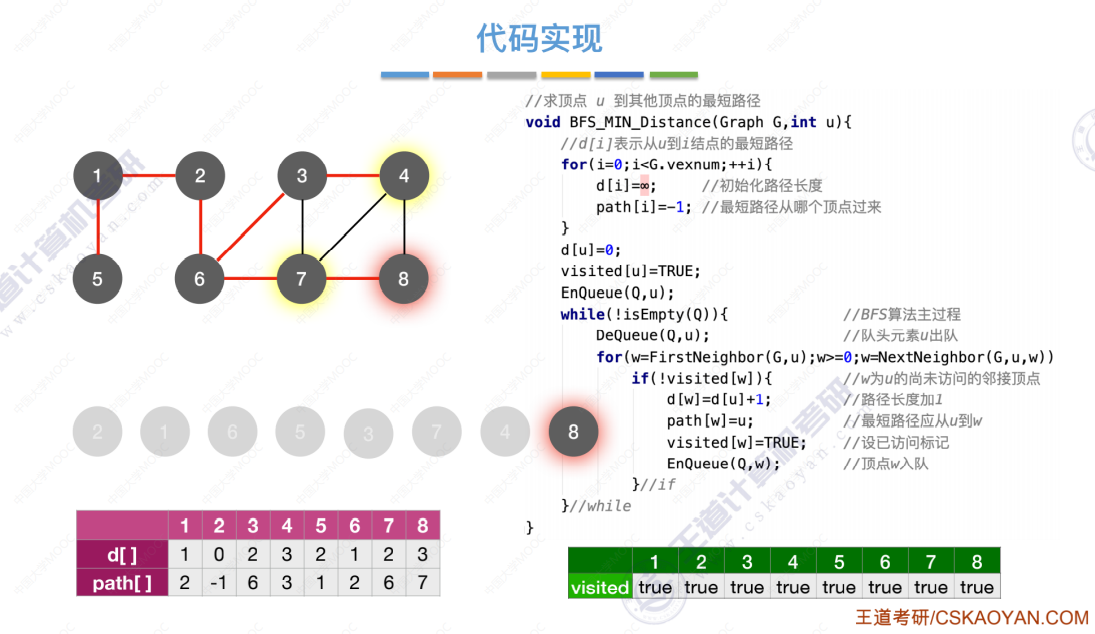
BFS(广度优先求最短路径)
BFS算法求单源最短路径只适用于无权图,或所有边的权值都相同的图。
引入

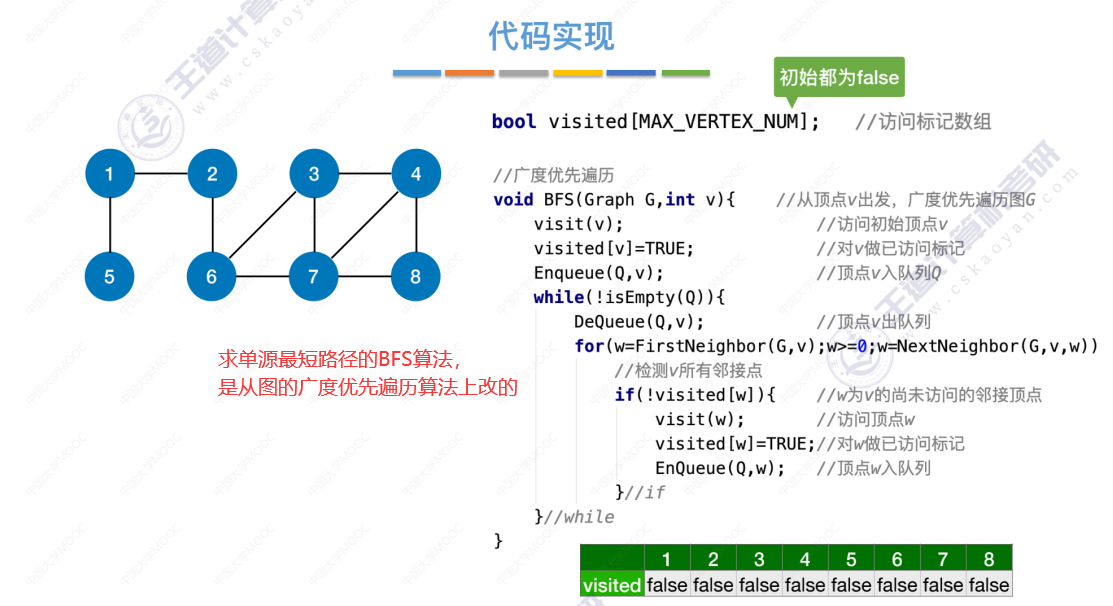
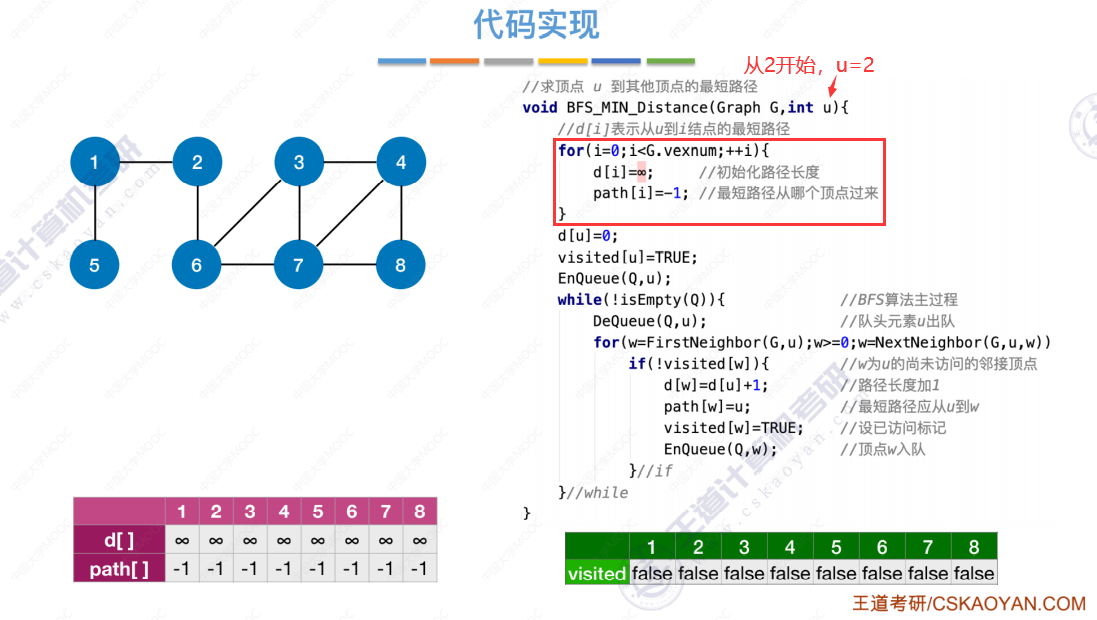
BFS求无权图的单源最短路径的代码实现
按照最短路径的求解方法生成的树,高度一定是最小的。
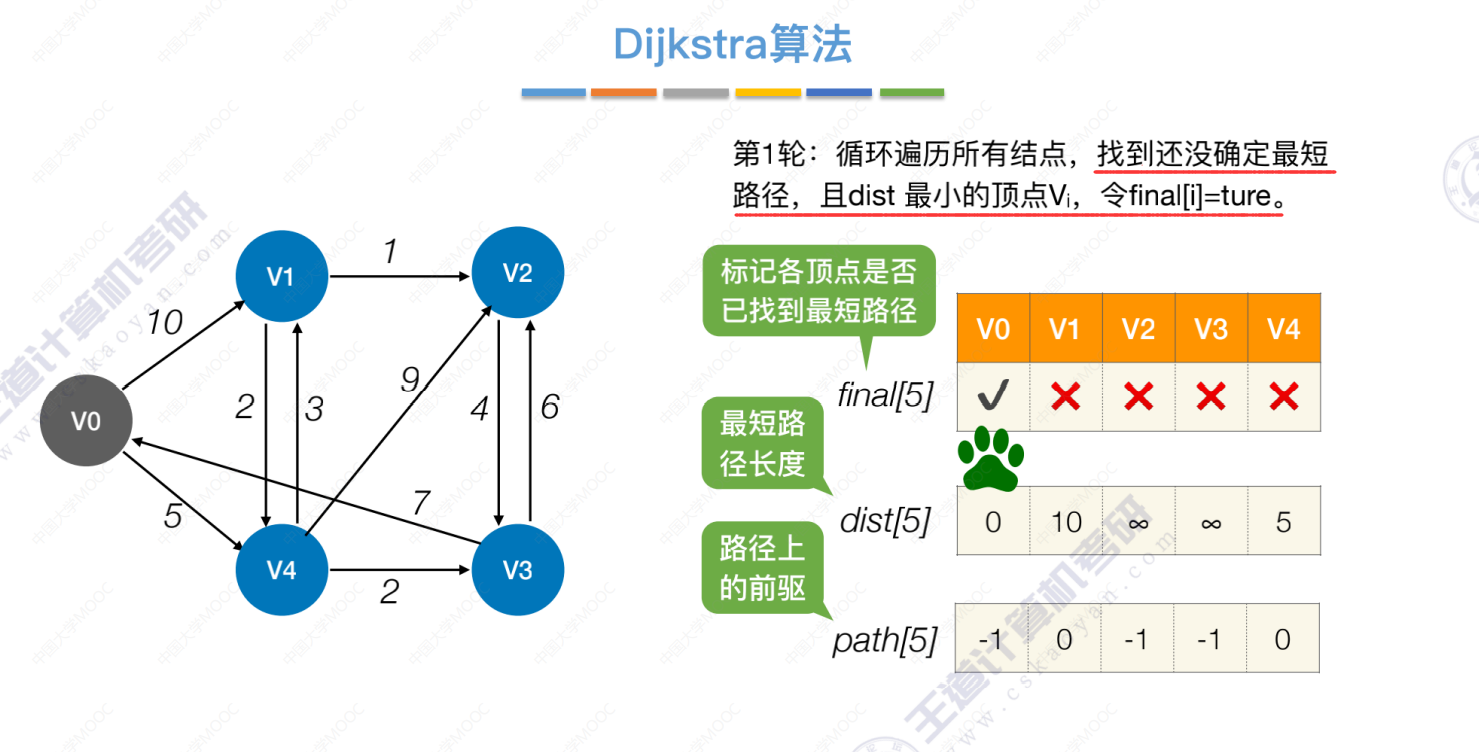
6.4-3 最短路径问题_Dijkstra算法(迪杰斯特拉算法)
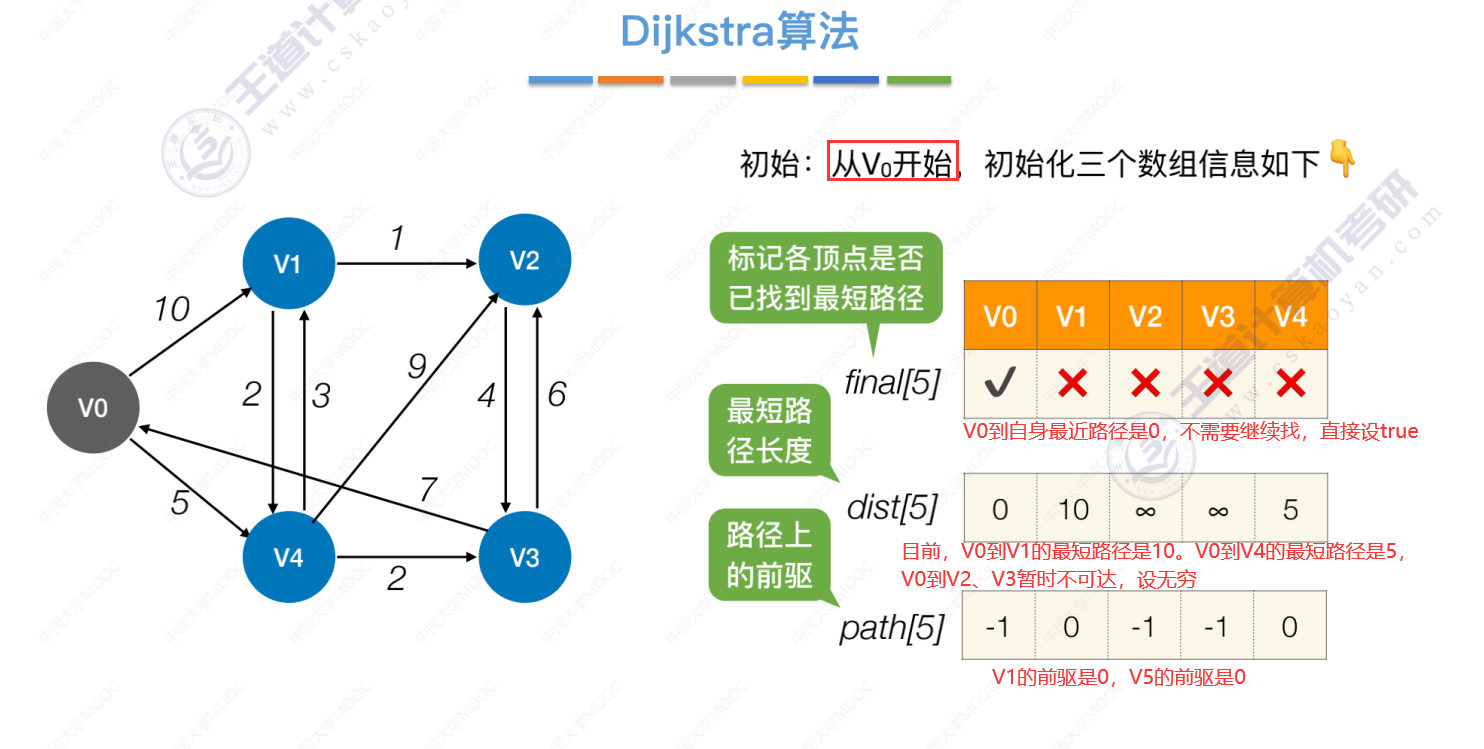
Dijkstra算法过程
初始化
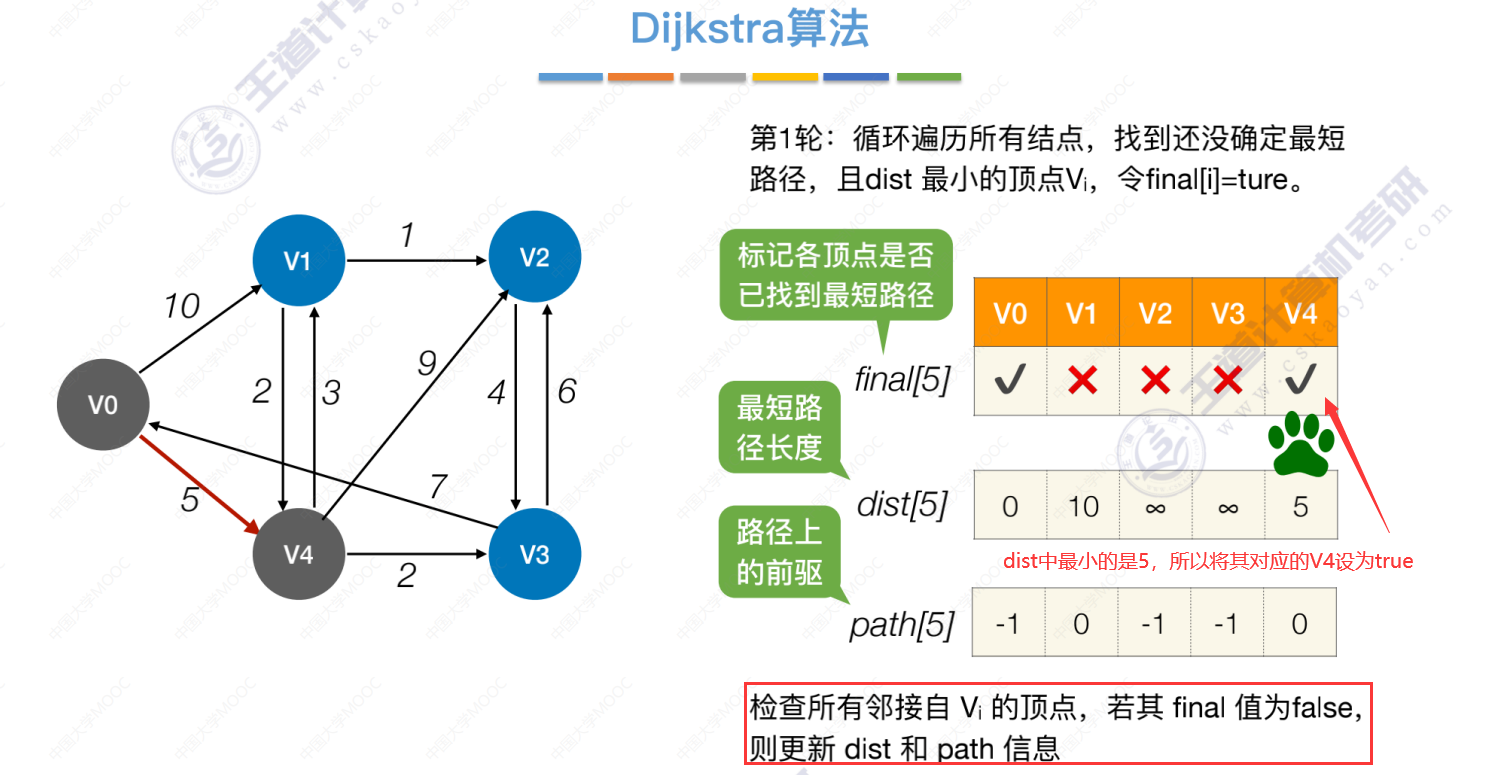
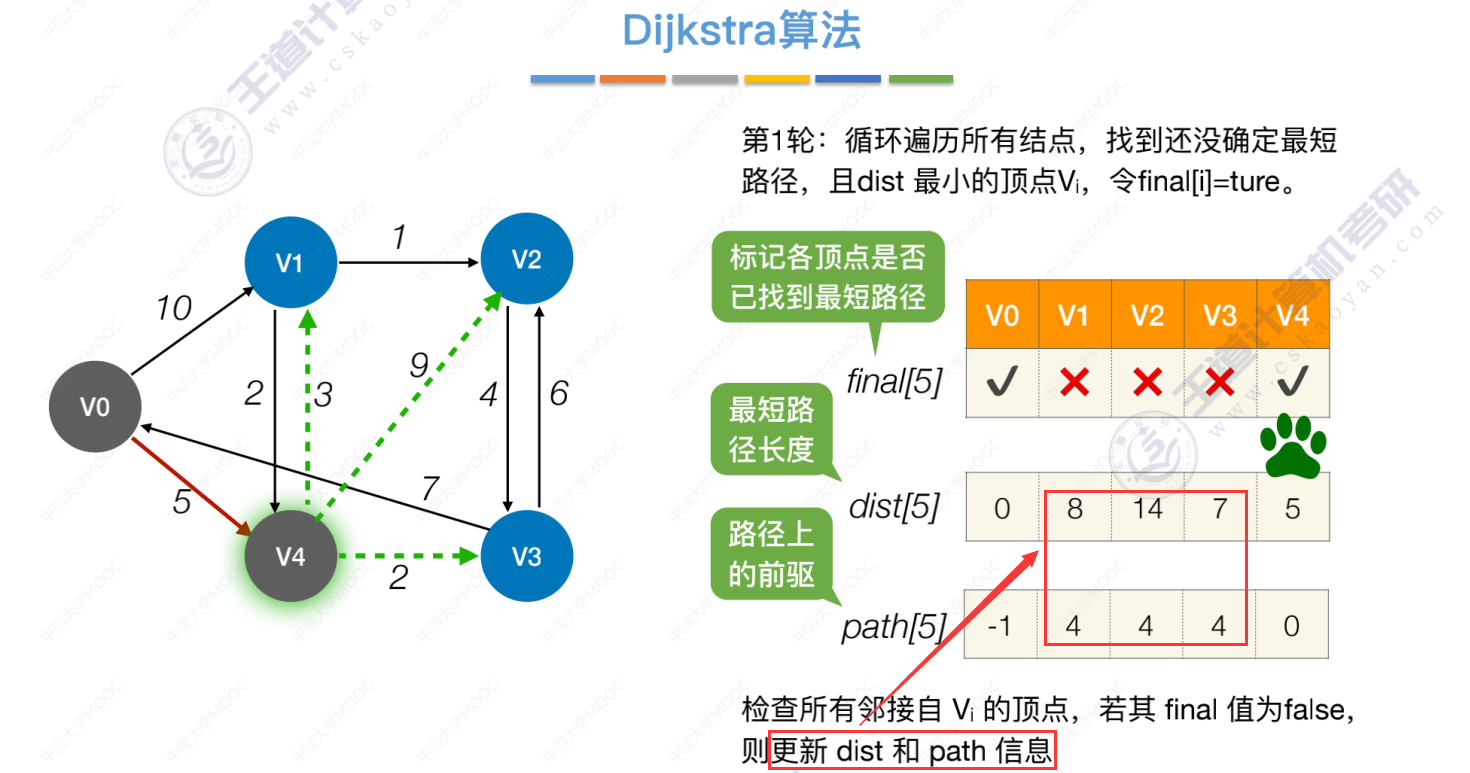
第1轮
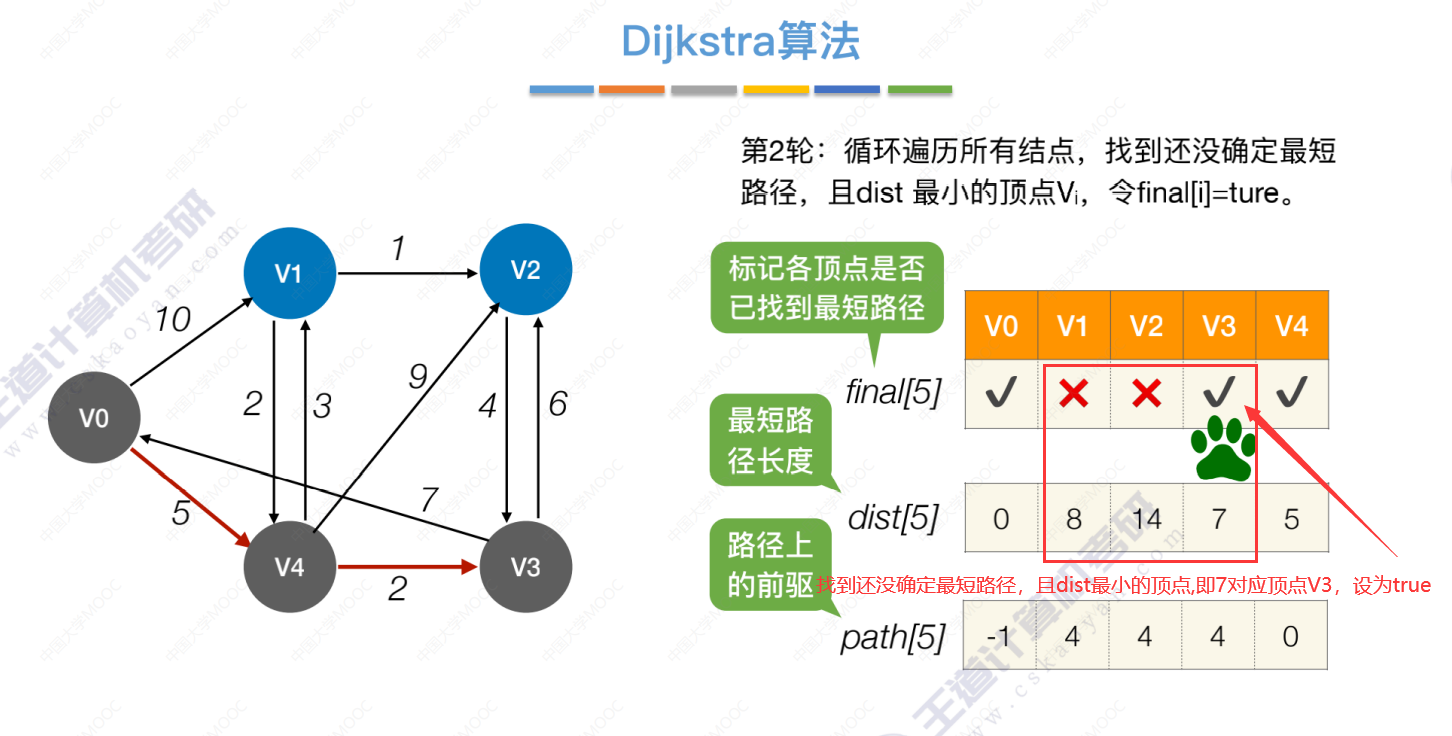
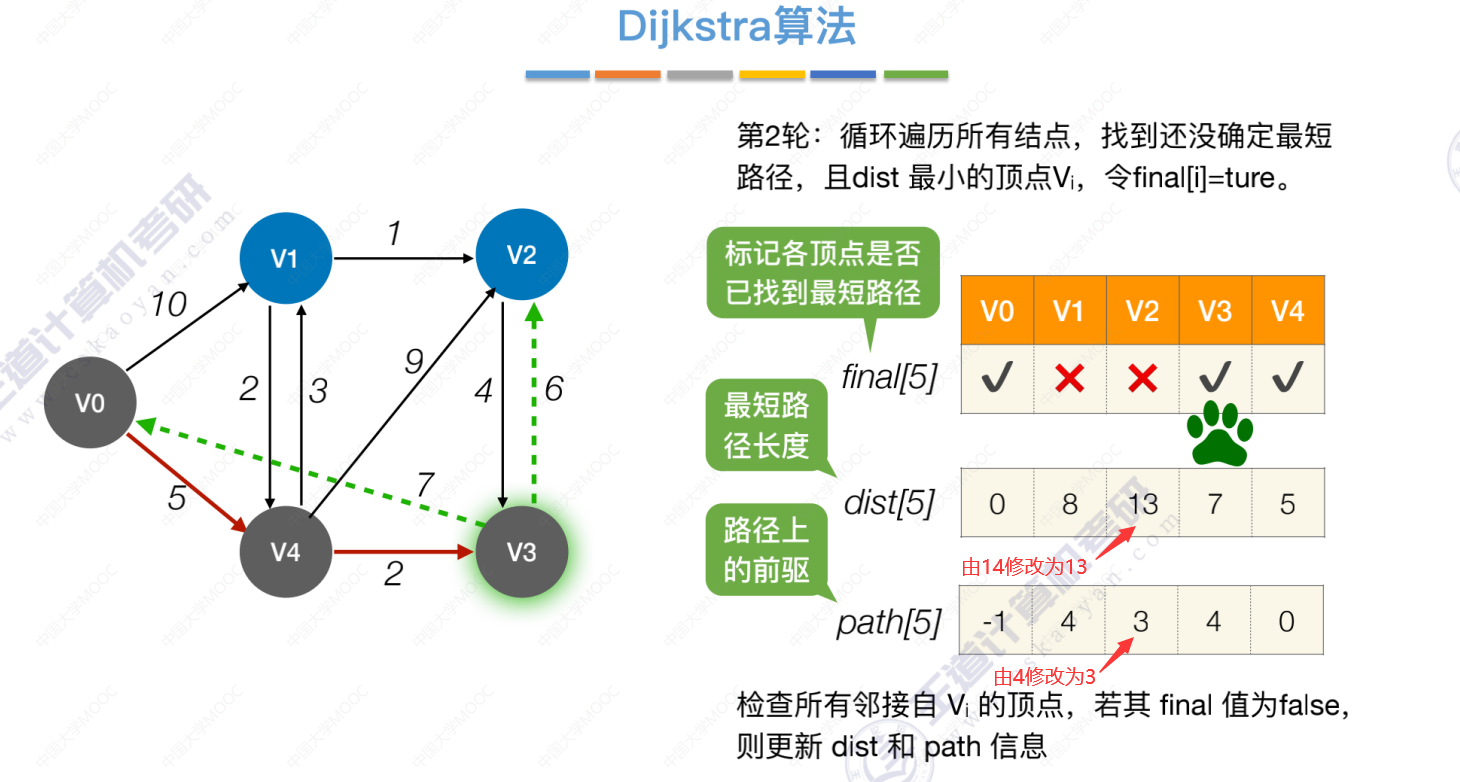
第2轮
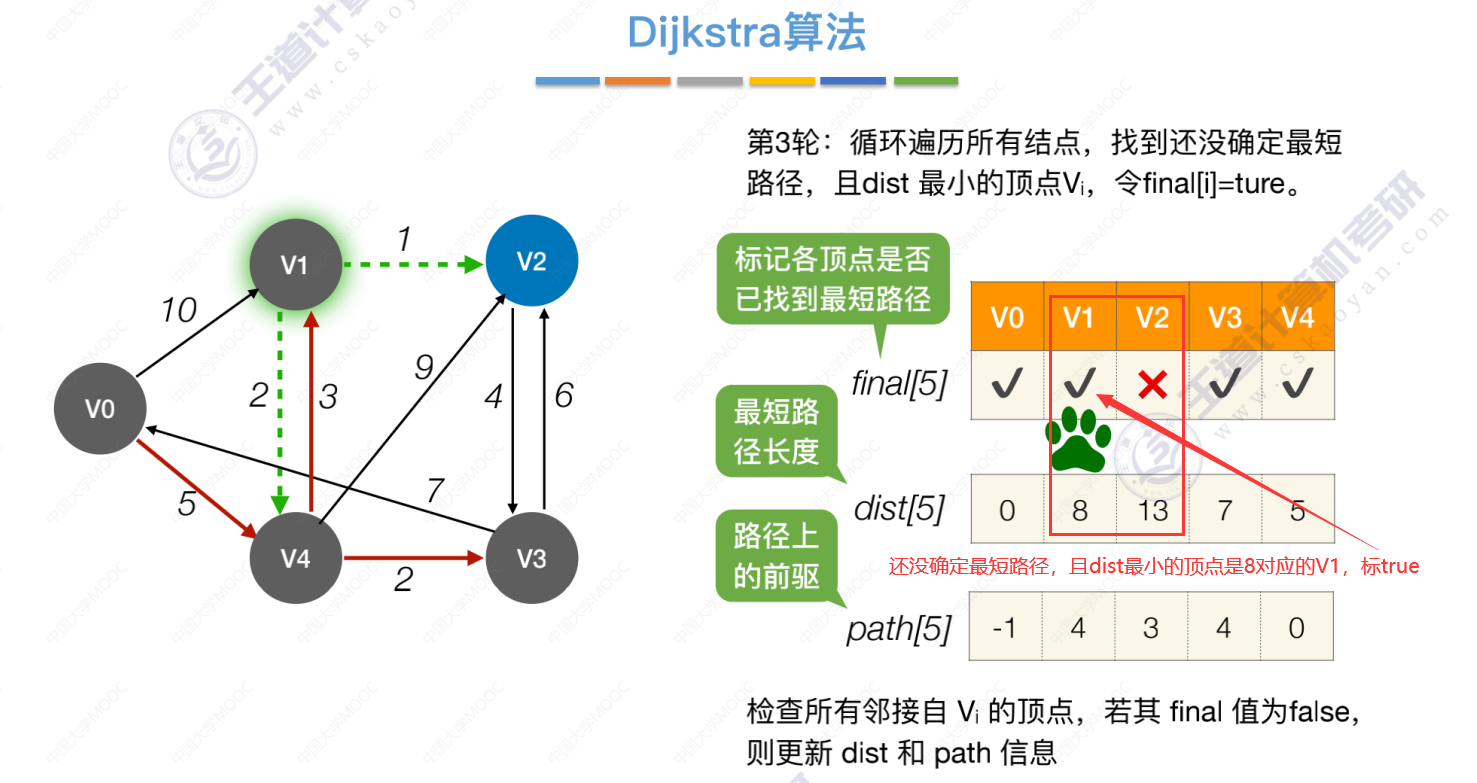
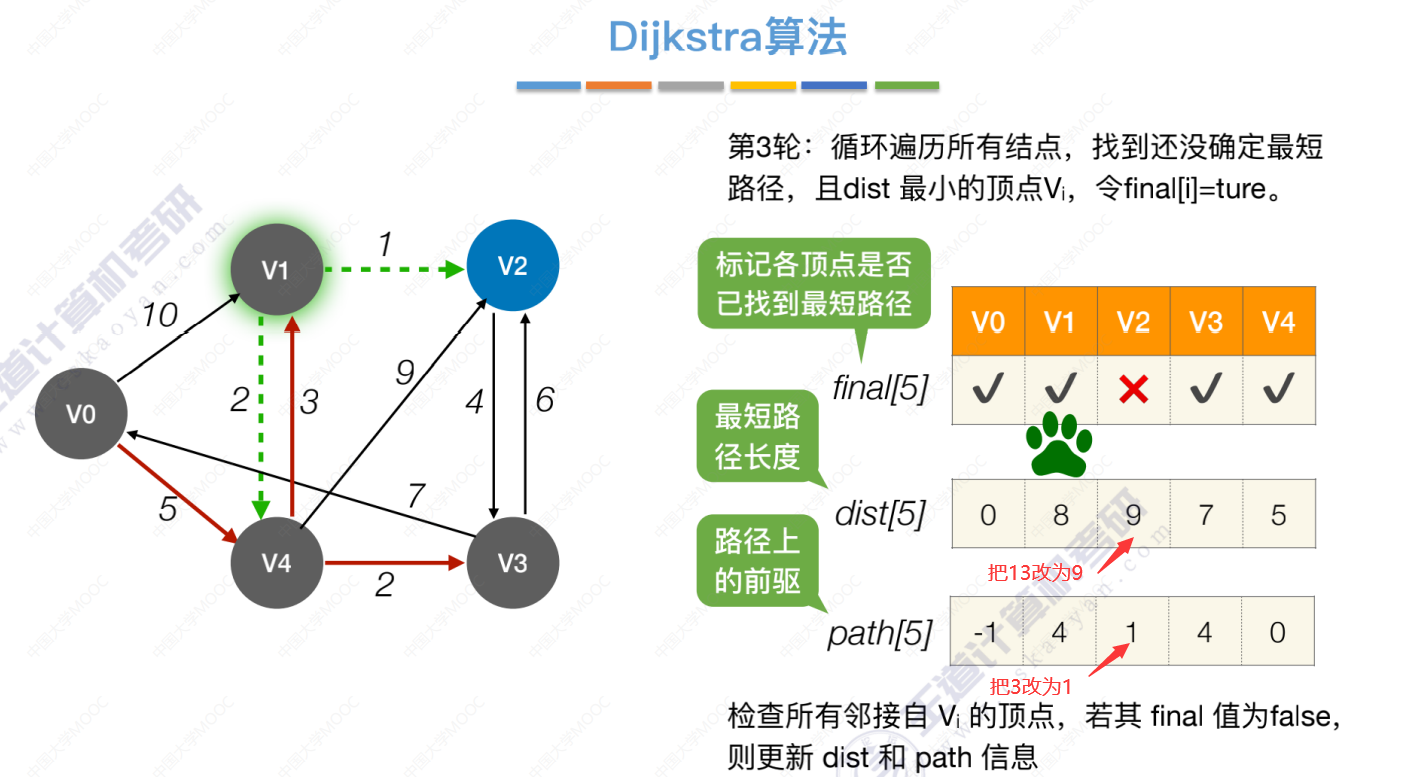
第3轮
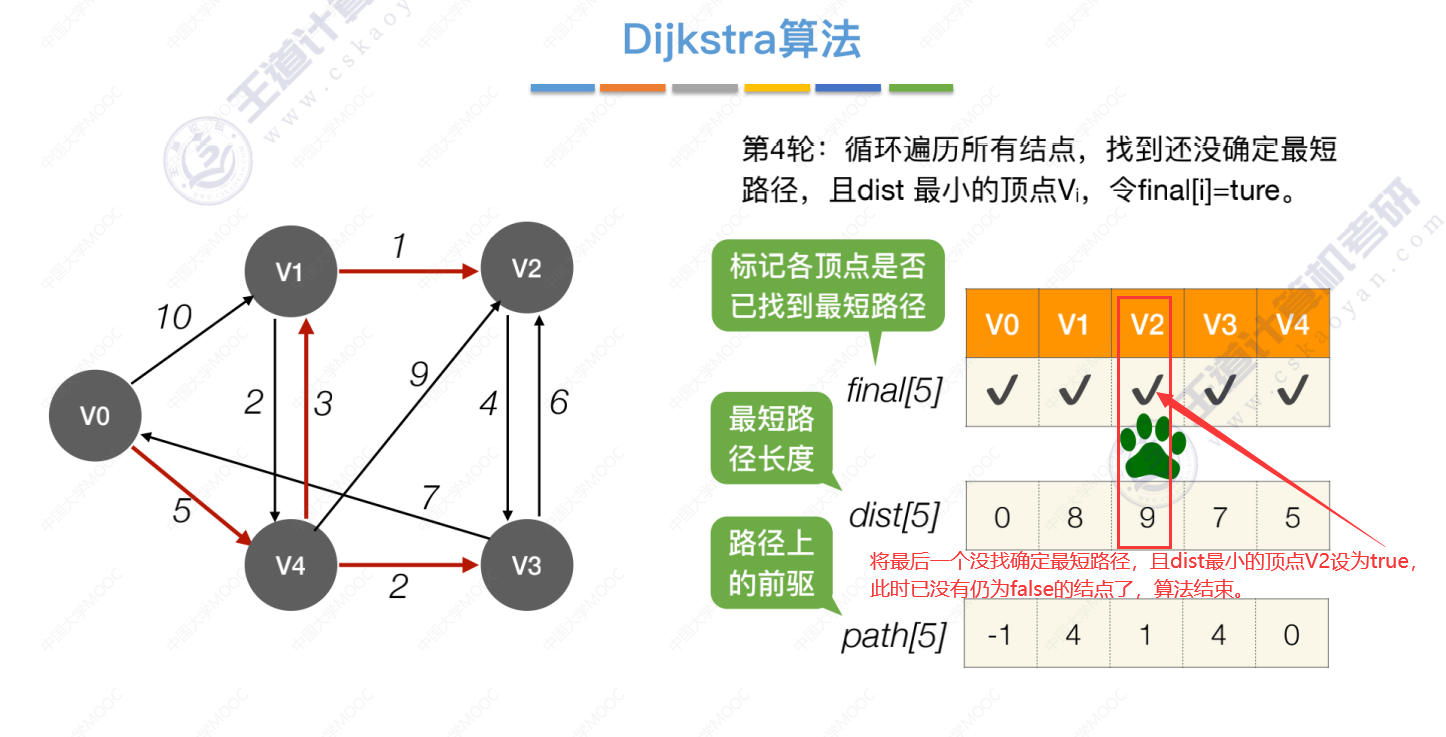
第4轮
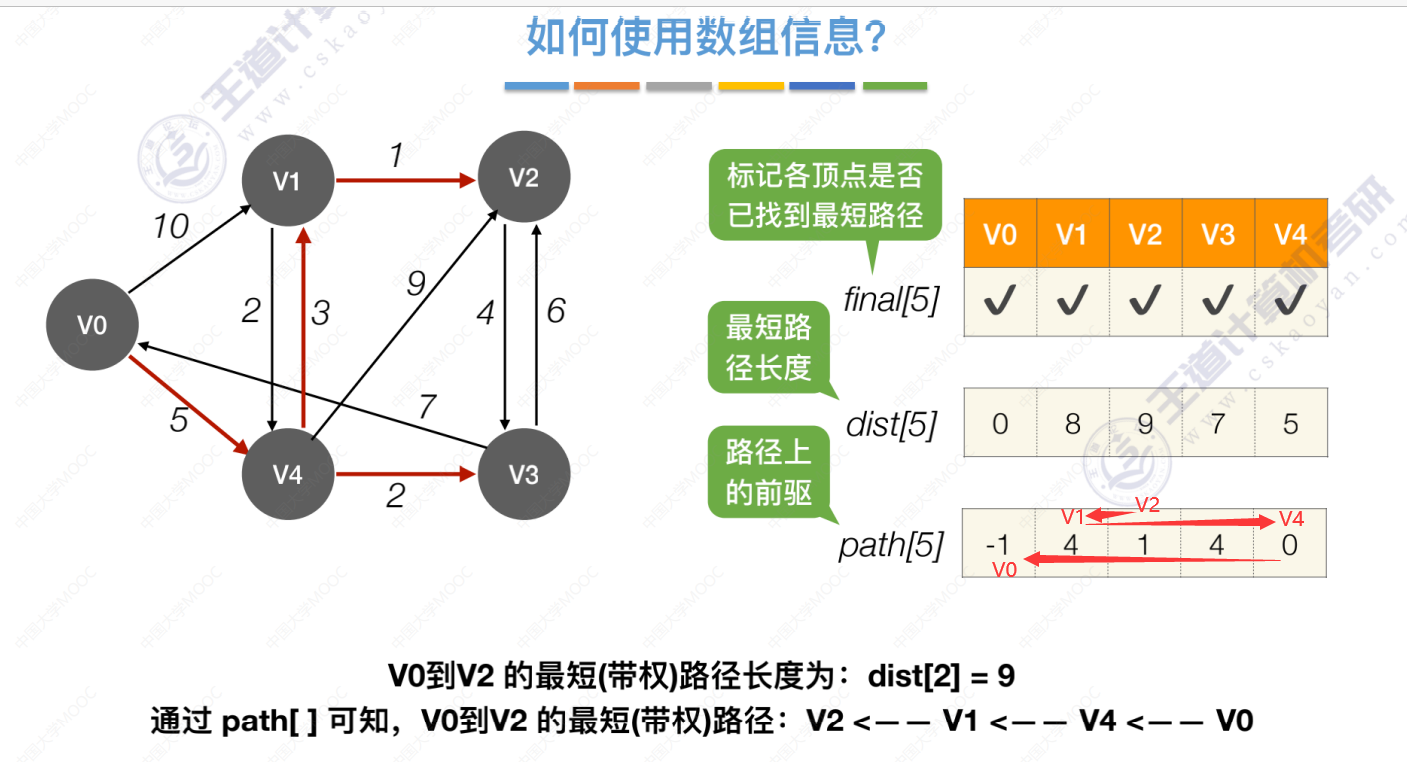
如何使用数组信息?
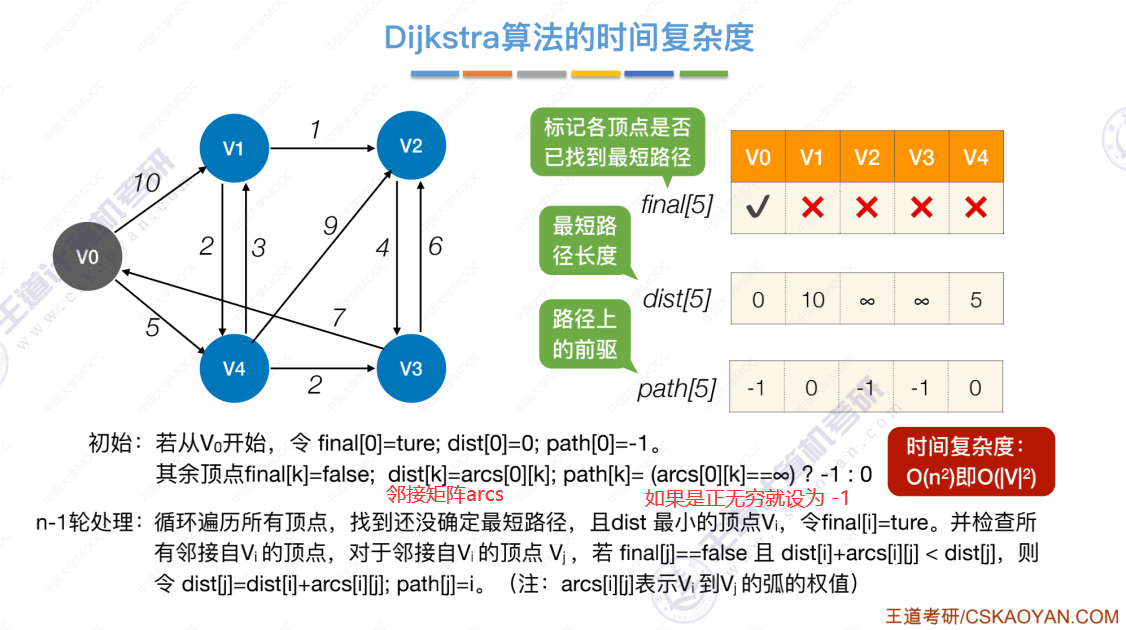
算法的时间复杂度
每轮处理一个结点,( 花费时间O(n) )
每处理一个结点要遍历一遍dist数组查找最小的。( 花费时间O(n) )
时间复杂度 O(n²)
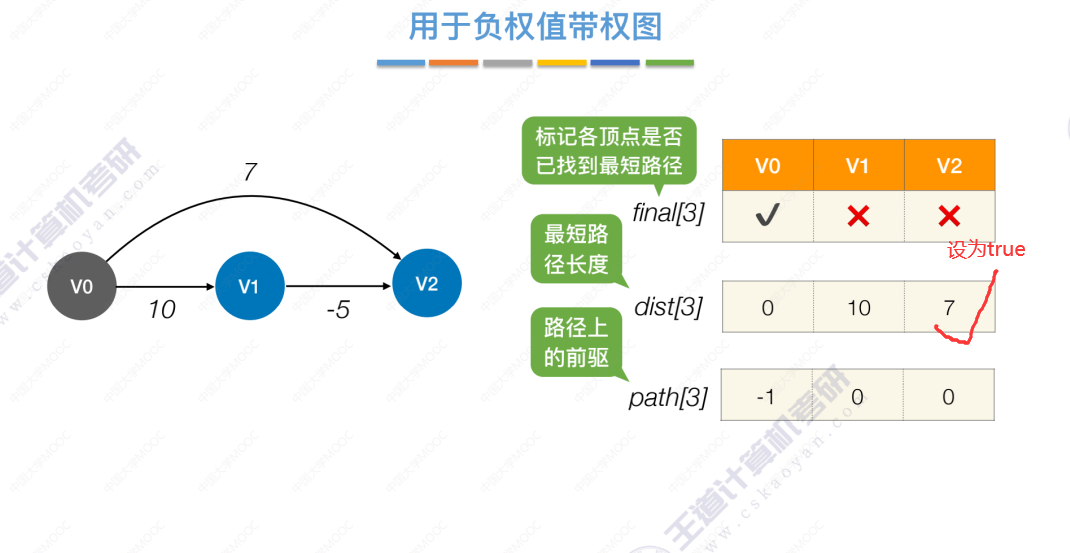
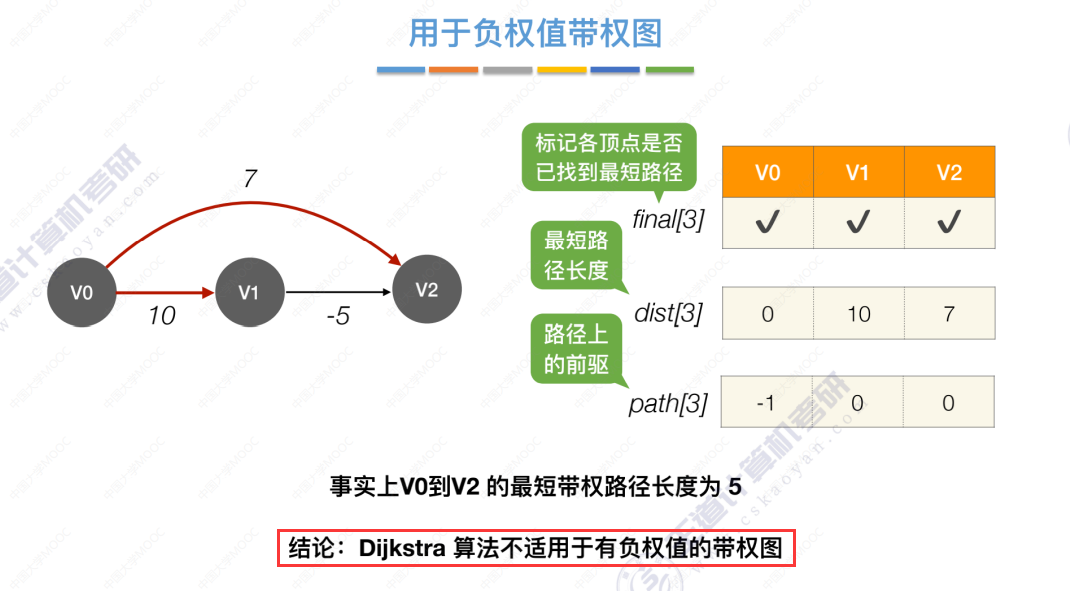
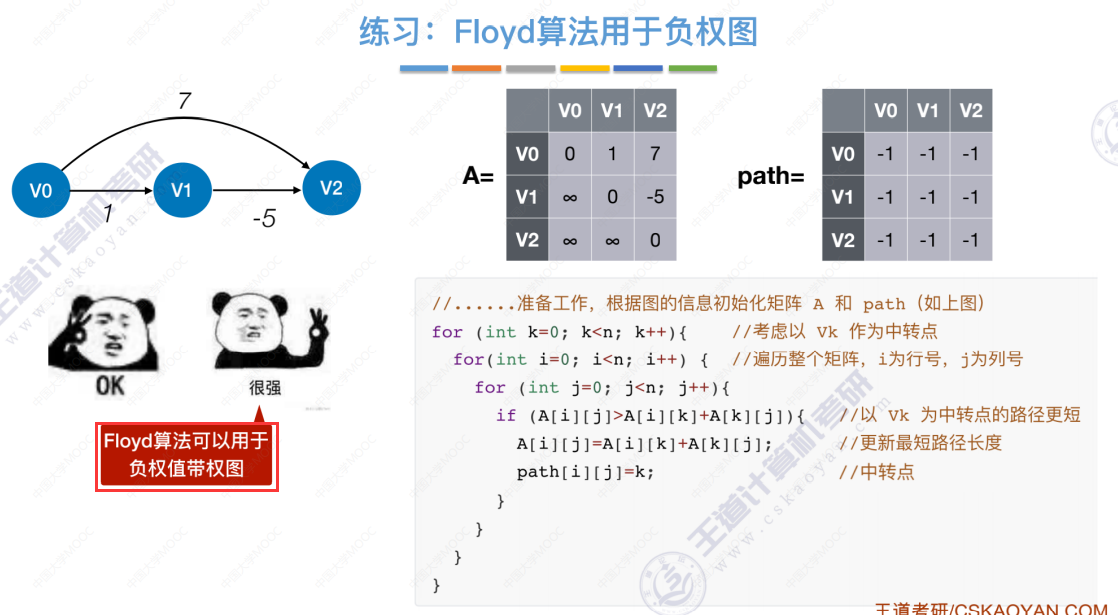
用于负权值带权图
首先选择还没确定最短路径的,且dist中最小的值 的 对应顶点设为true。
然后把V1设为true,算法结束。
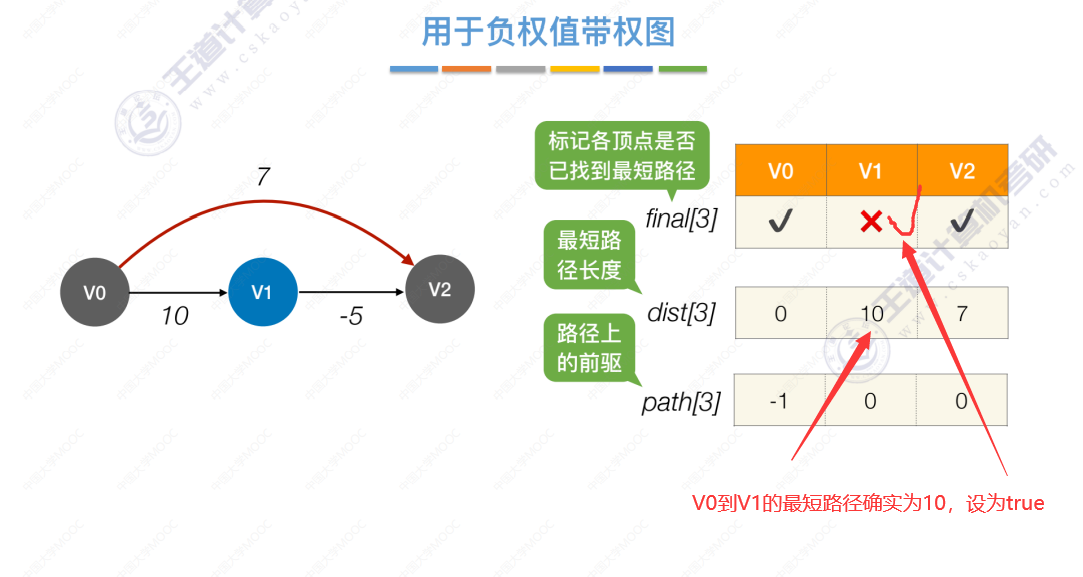
通过算法得出的V1到V2的最短路径是7,而实际最短路径是5,说明Dijkstra算法不适用于有负权值的带权图。
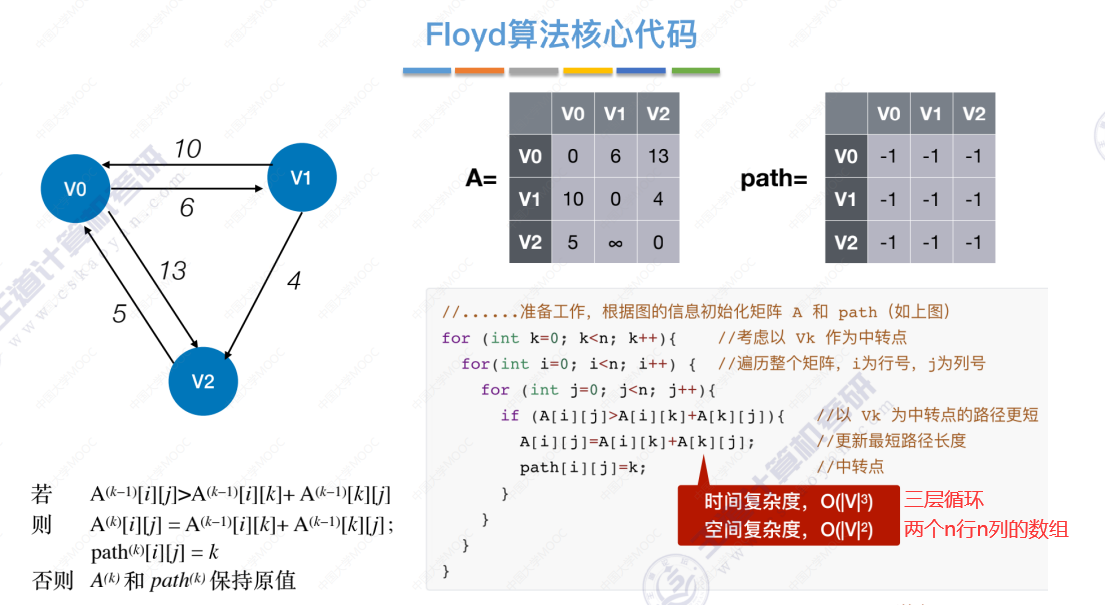
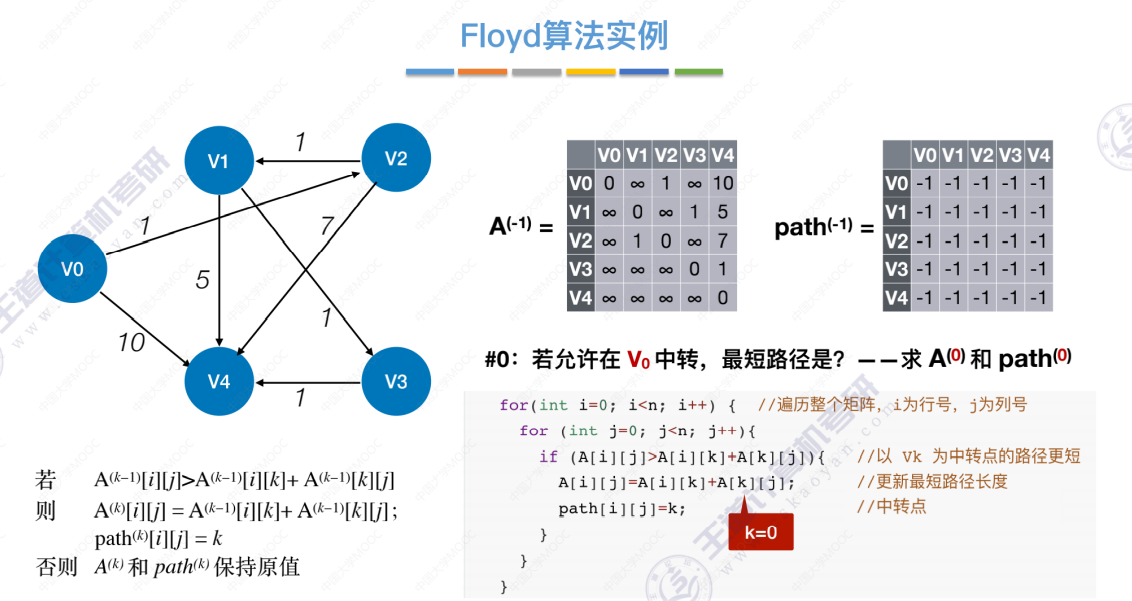
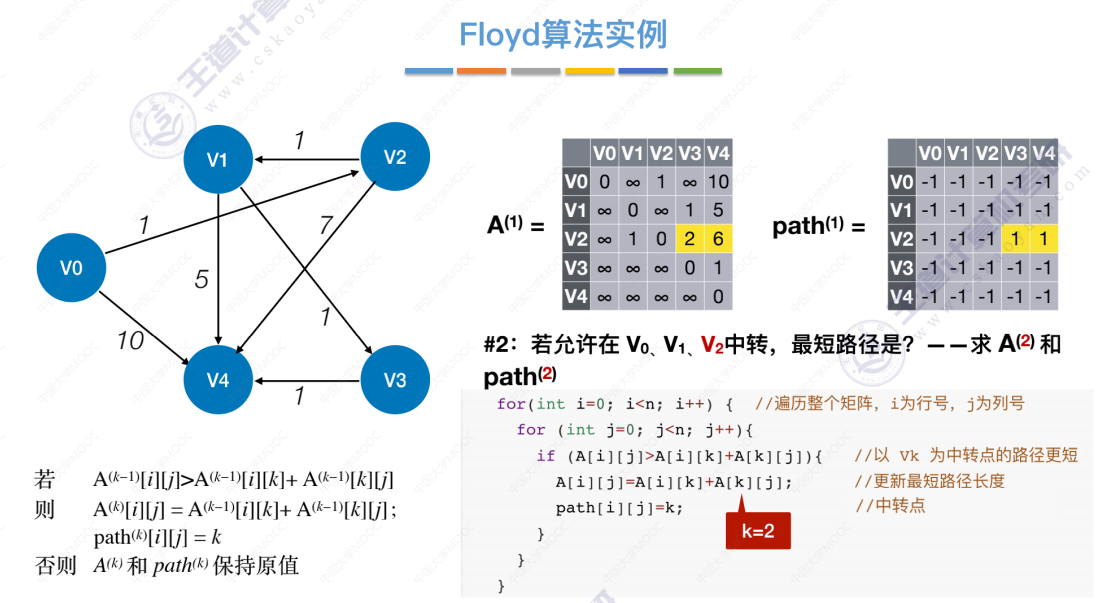
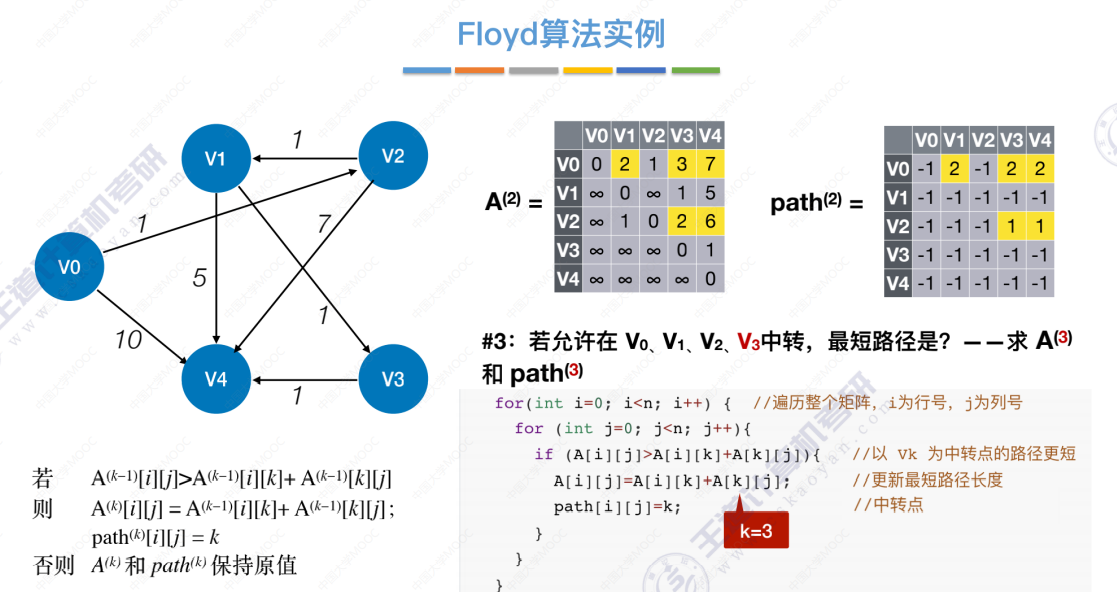
6.4-4 最短路径问题_Floyd算法(弗洛伊德算法)
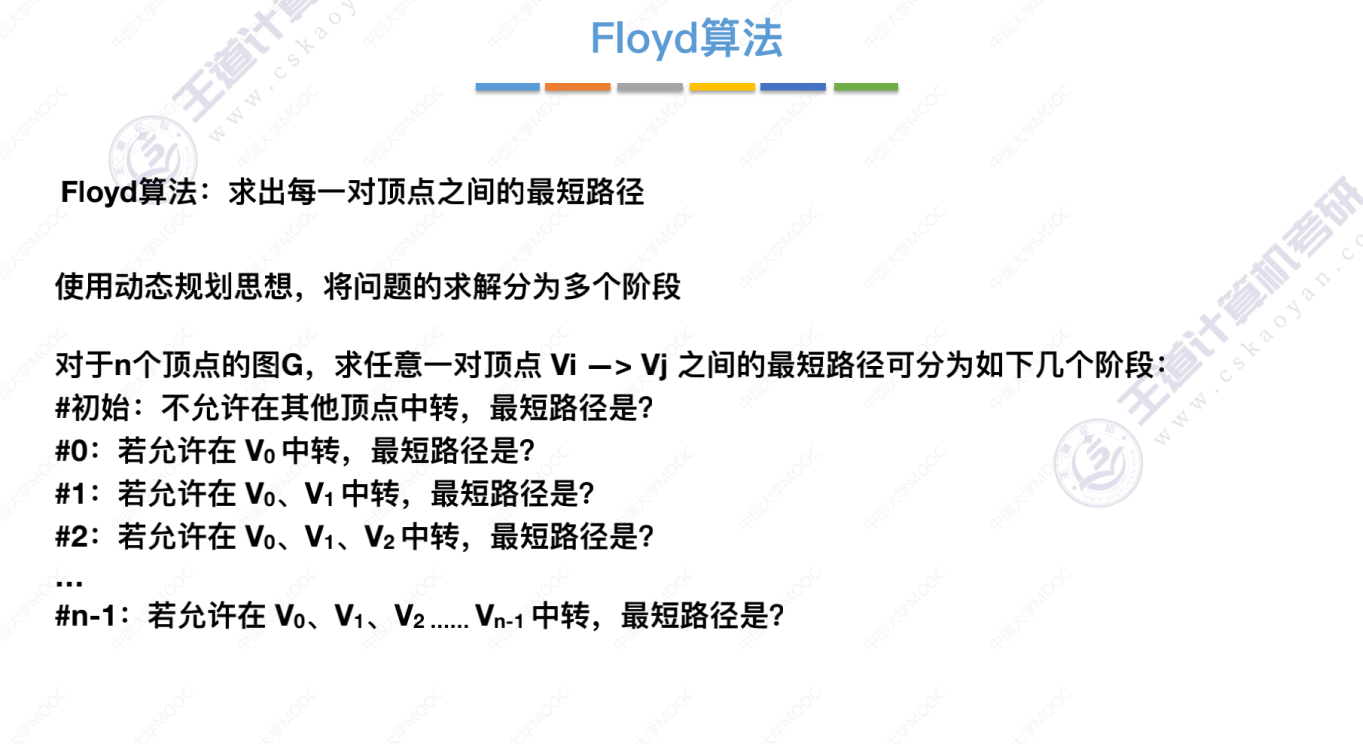
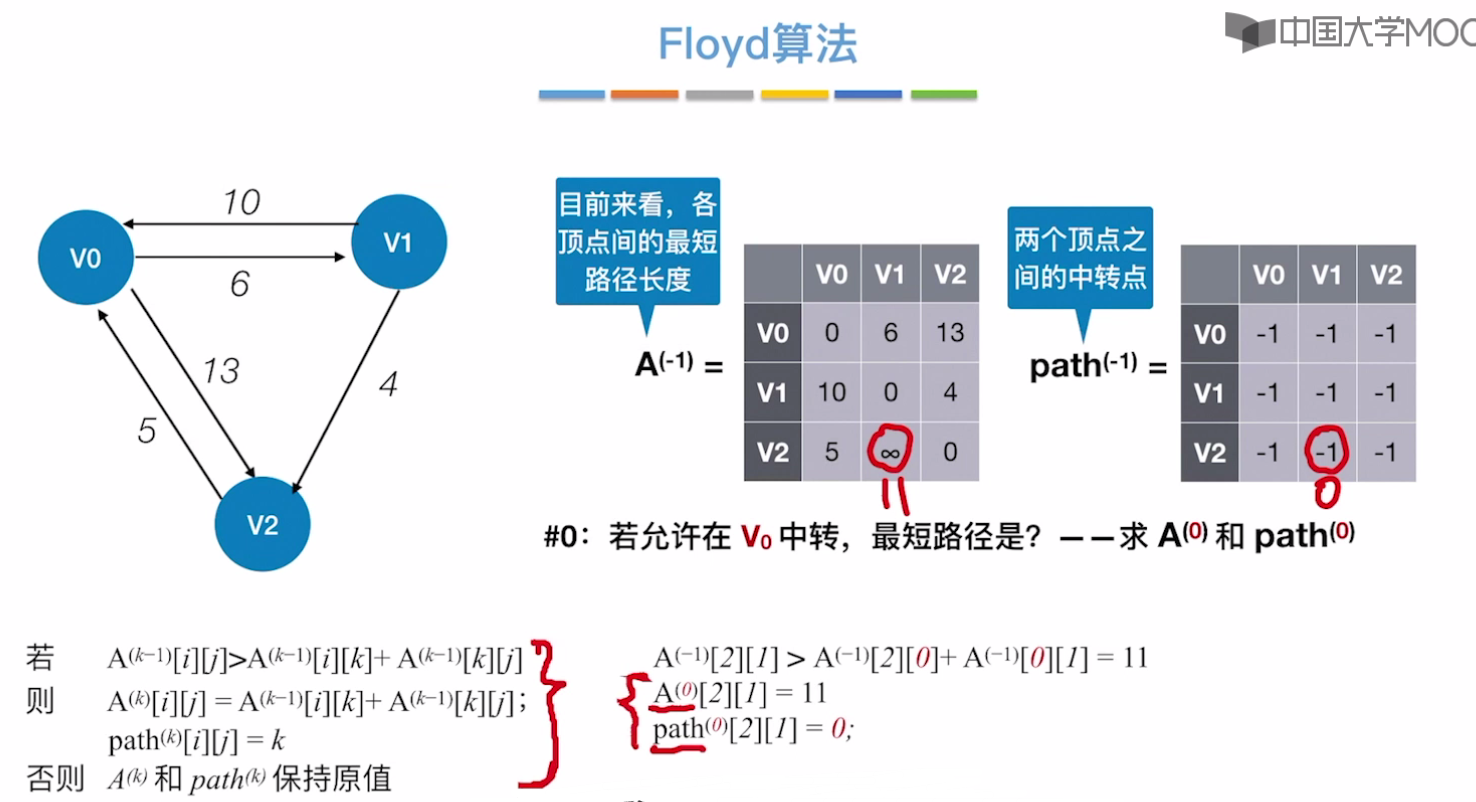
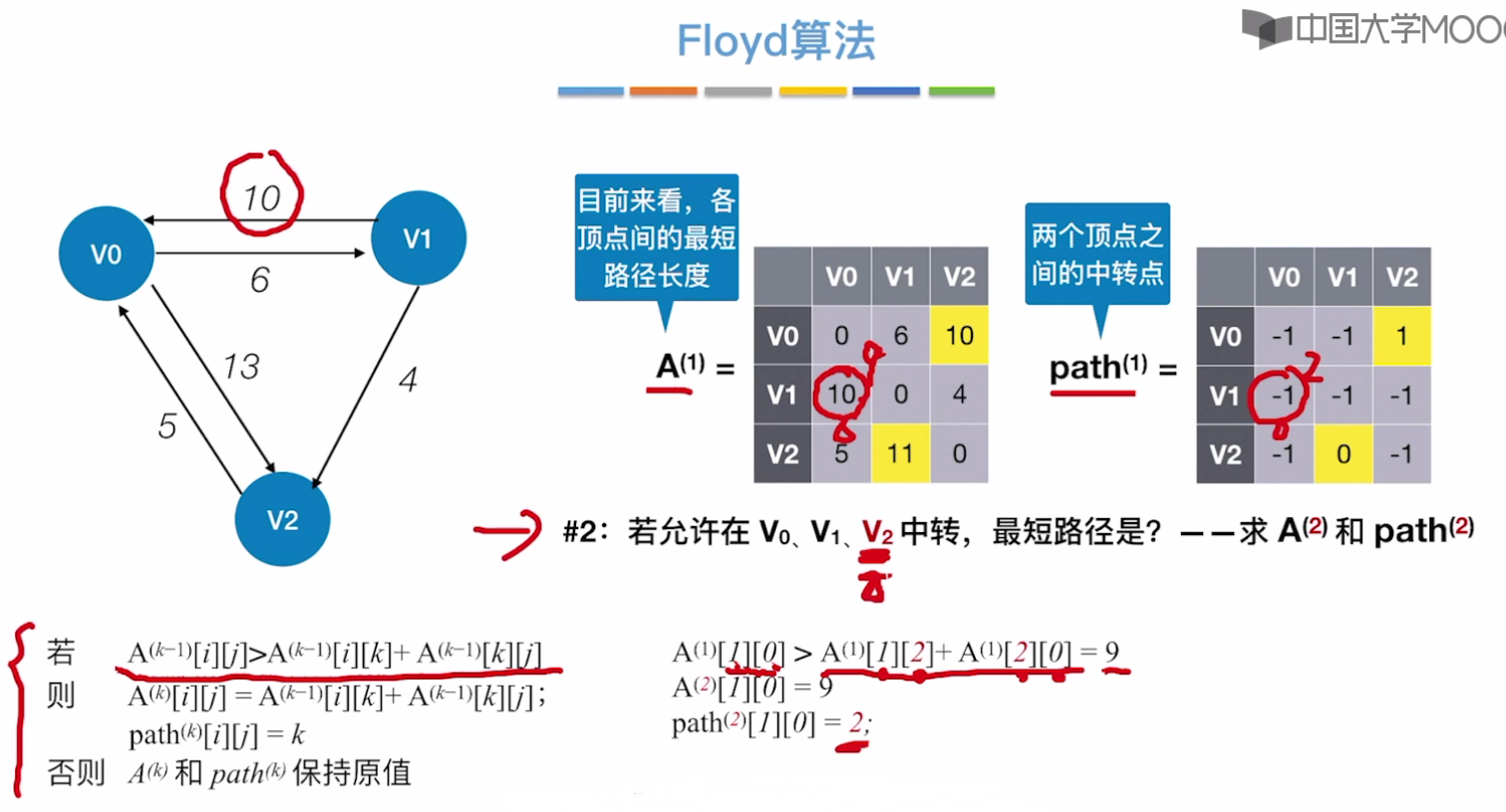
3个结点的弗洛伊德算法 演示
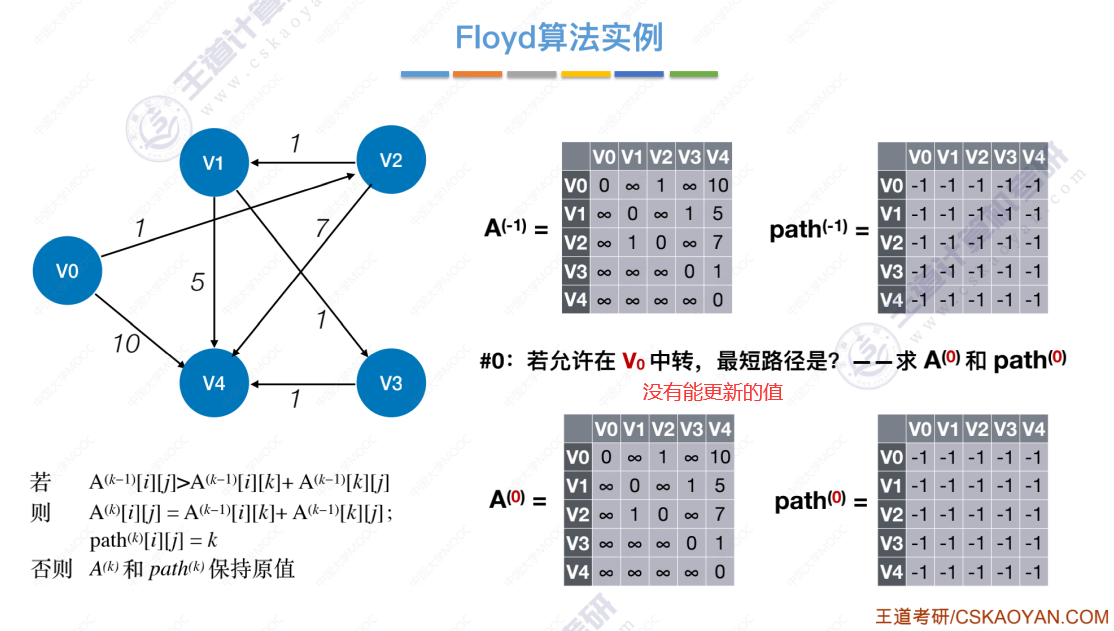
允许V0中转后,仅会更新以下一处数据。
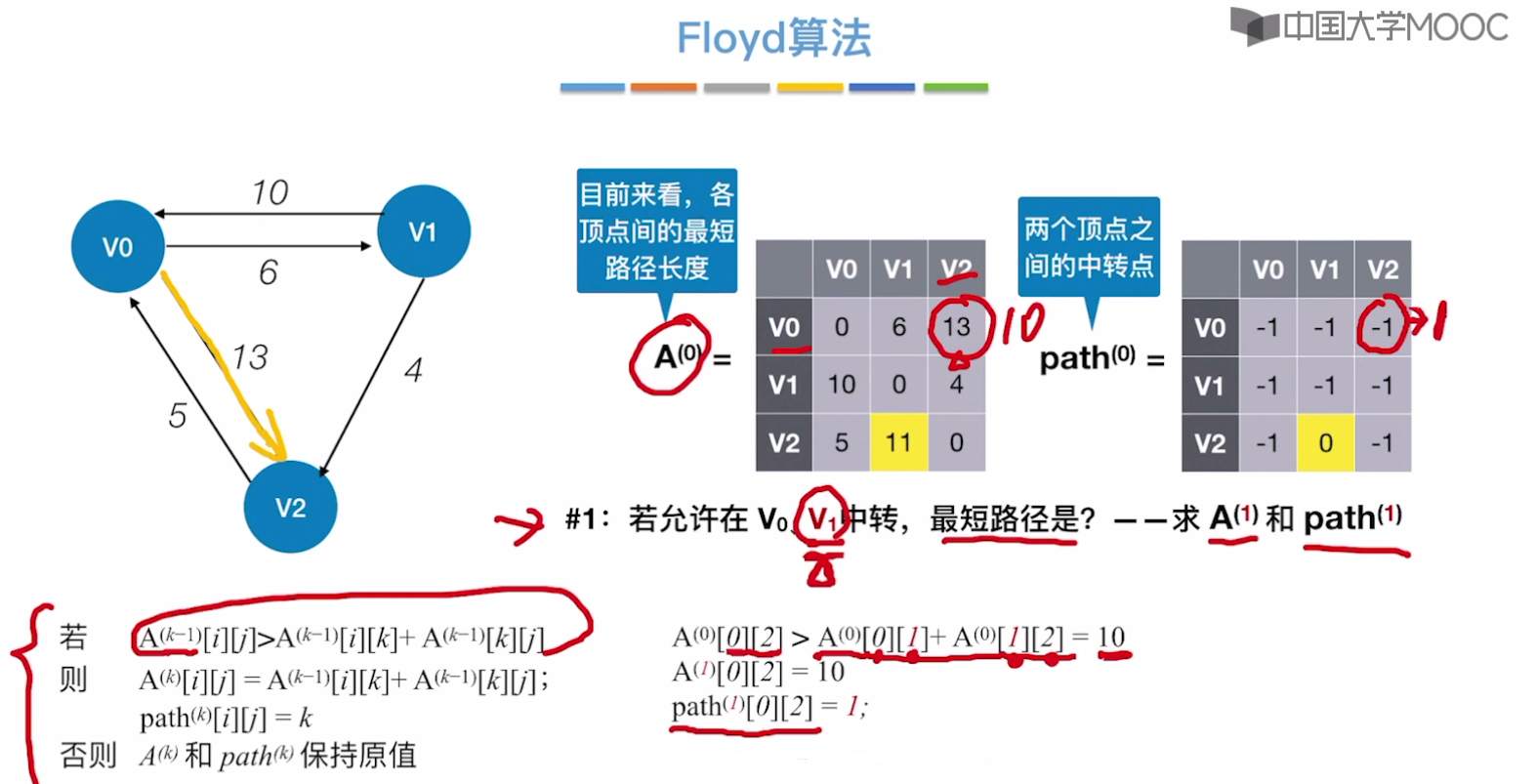
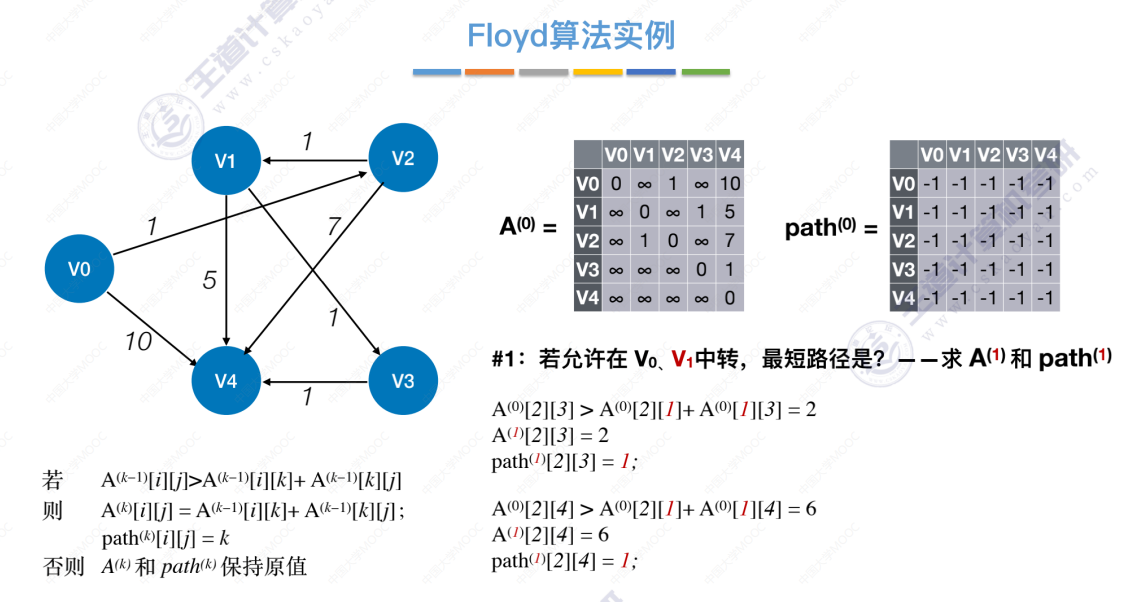
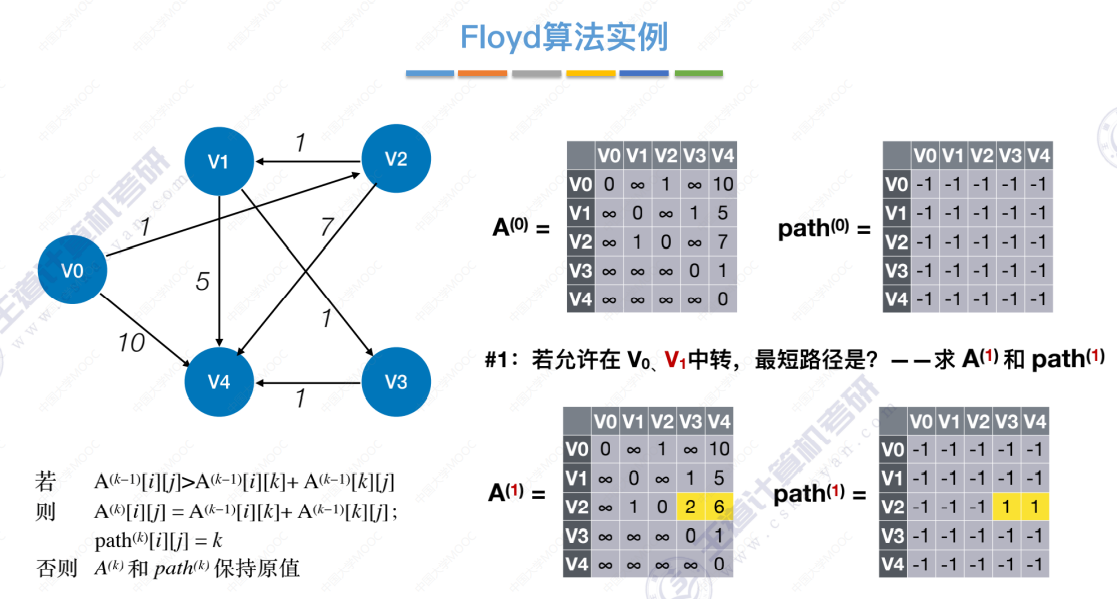
允许V0、V1中转后,仅会更新以下一处数据。
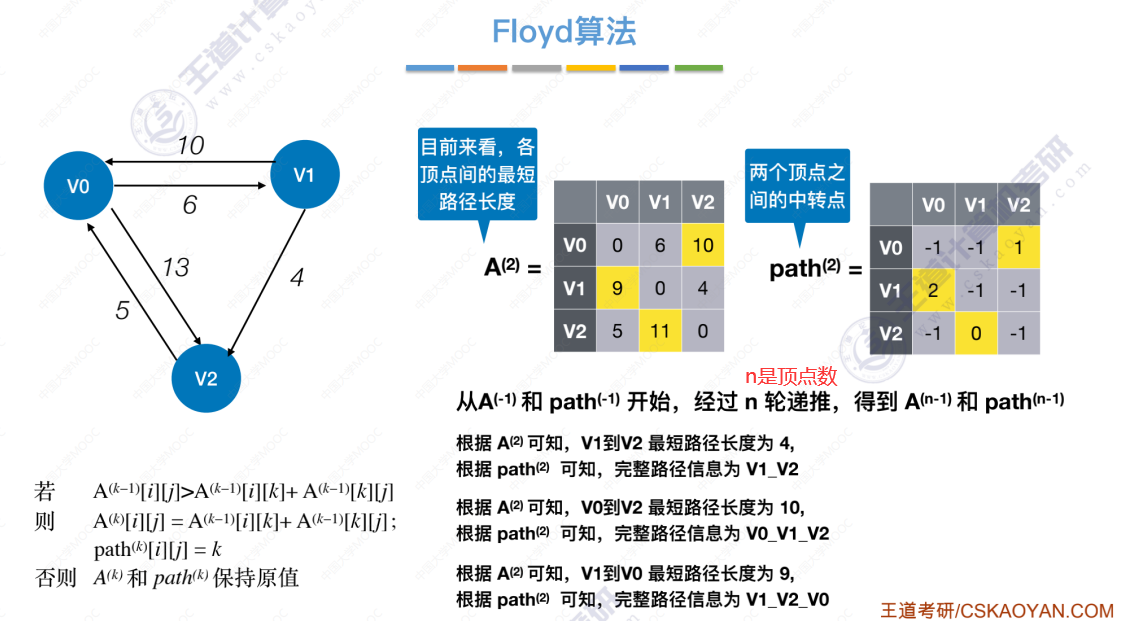
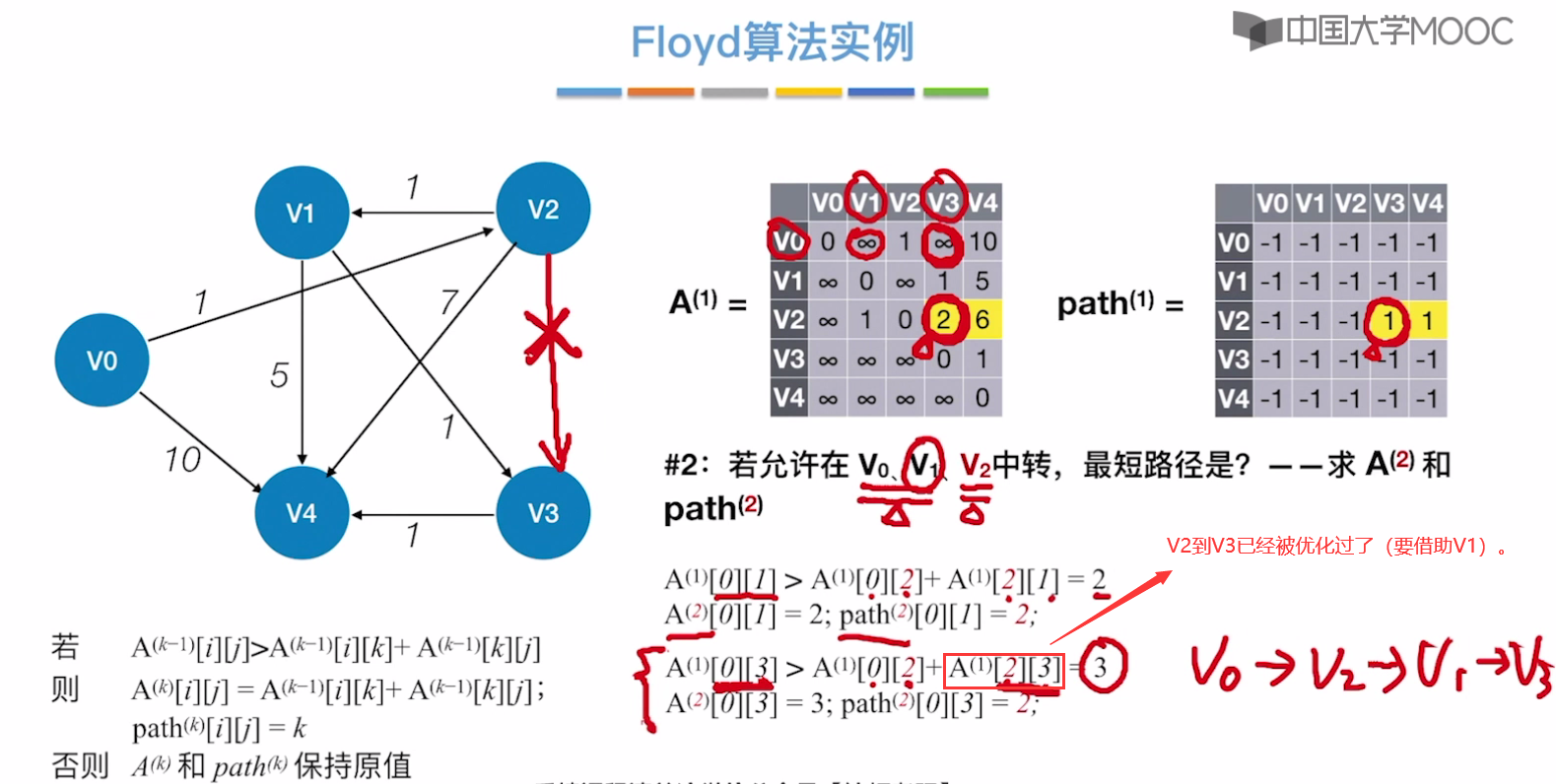
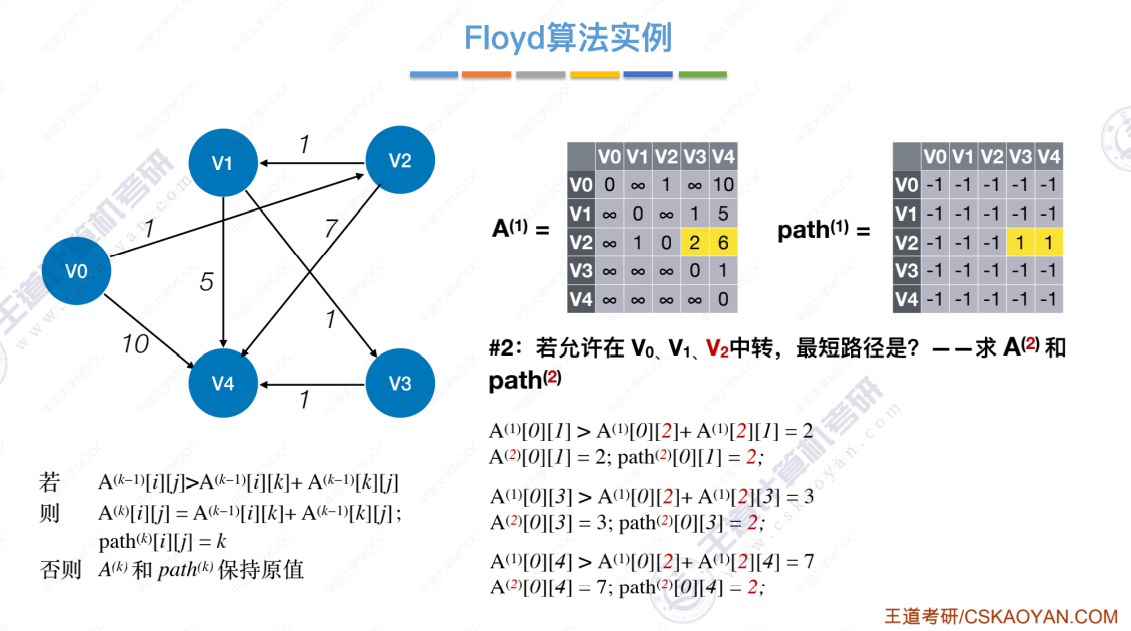
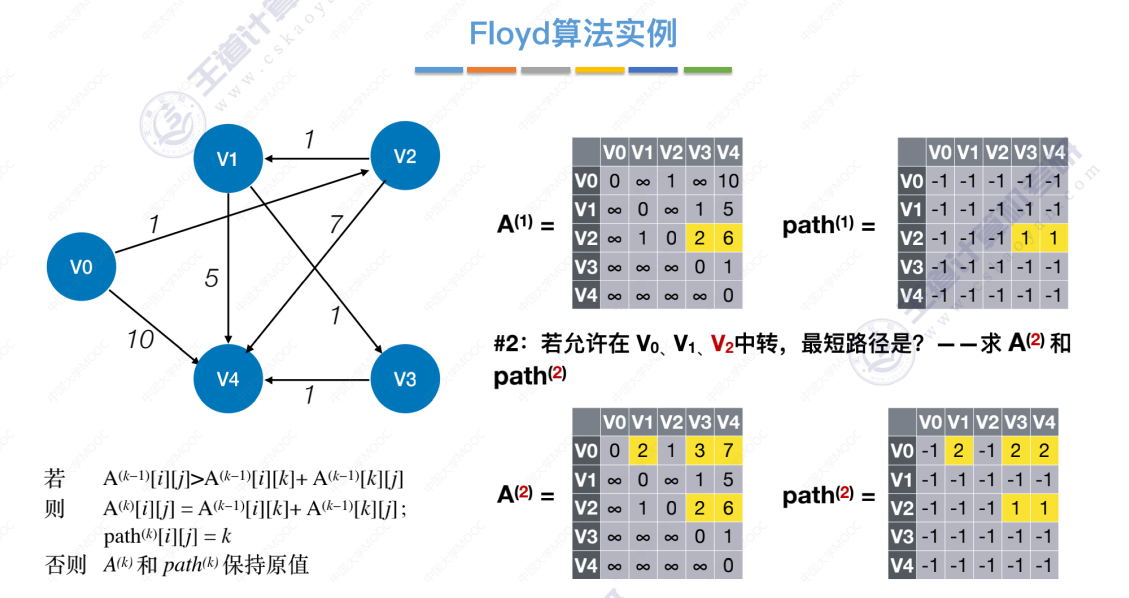
允许V0、V1、V2中转后,仅会更新以下一处数据。
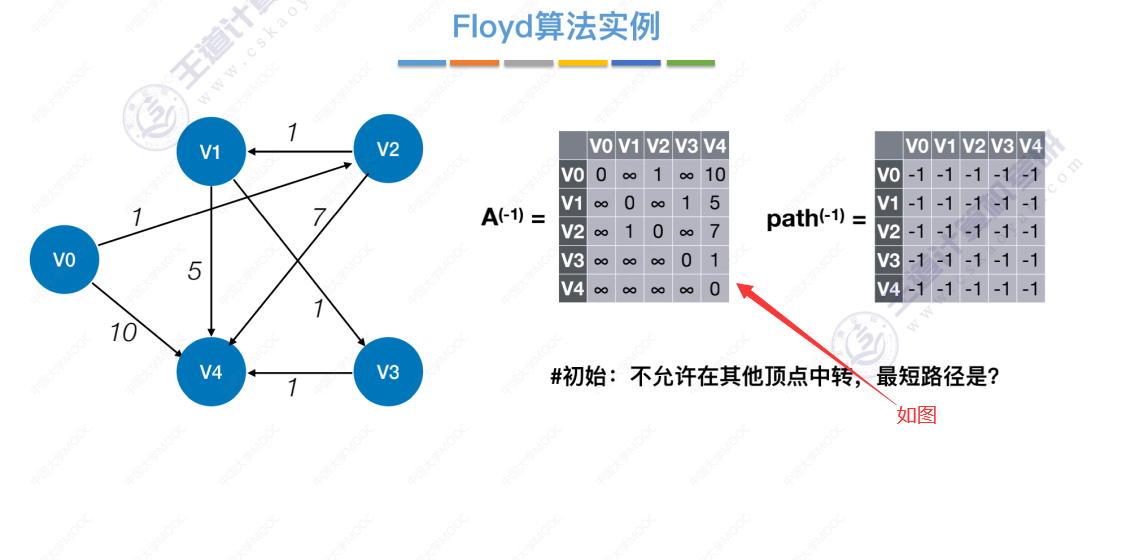
大于3个结点的弗洛伊德算法演示
不允许中转点
允许中转点V0
允许中转点V0、V1
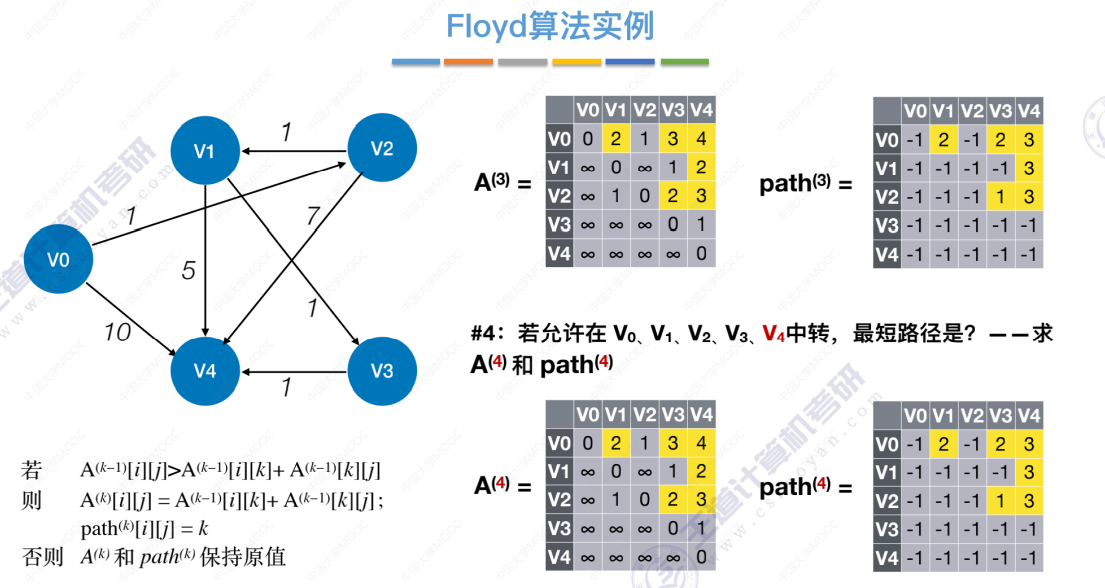
允许中转点V0、V1、V2
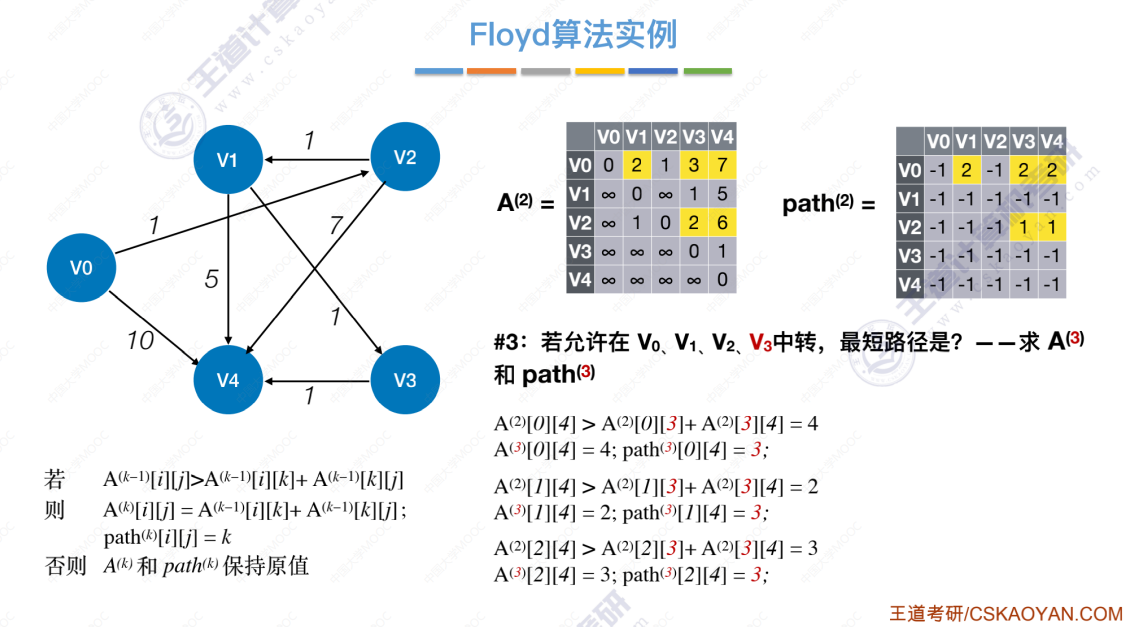
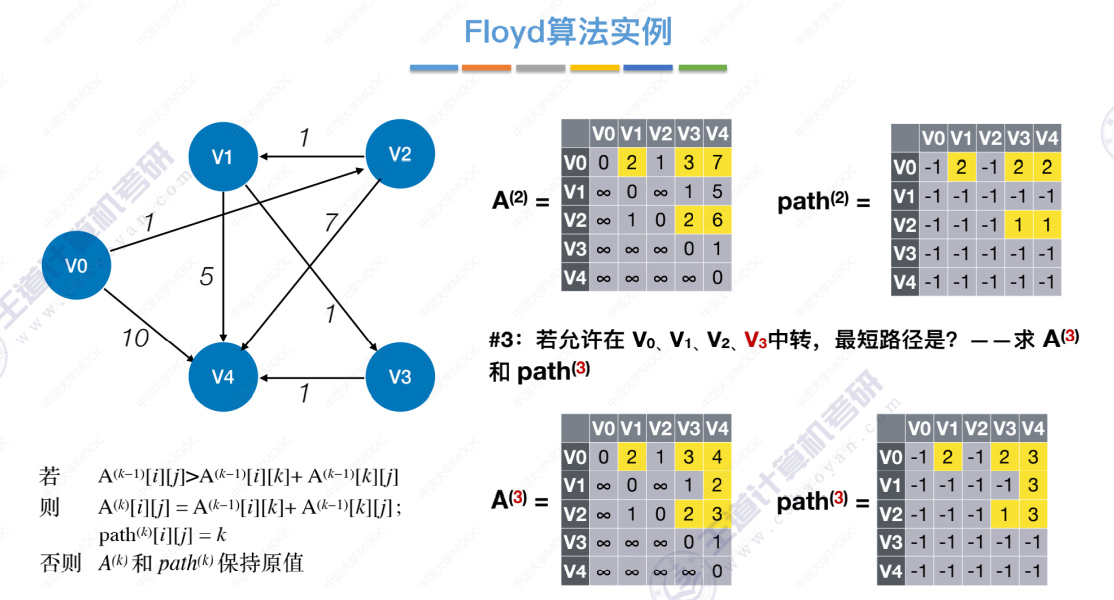
允许中转点V0、V1、V2、V3
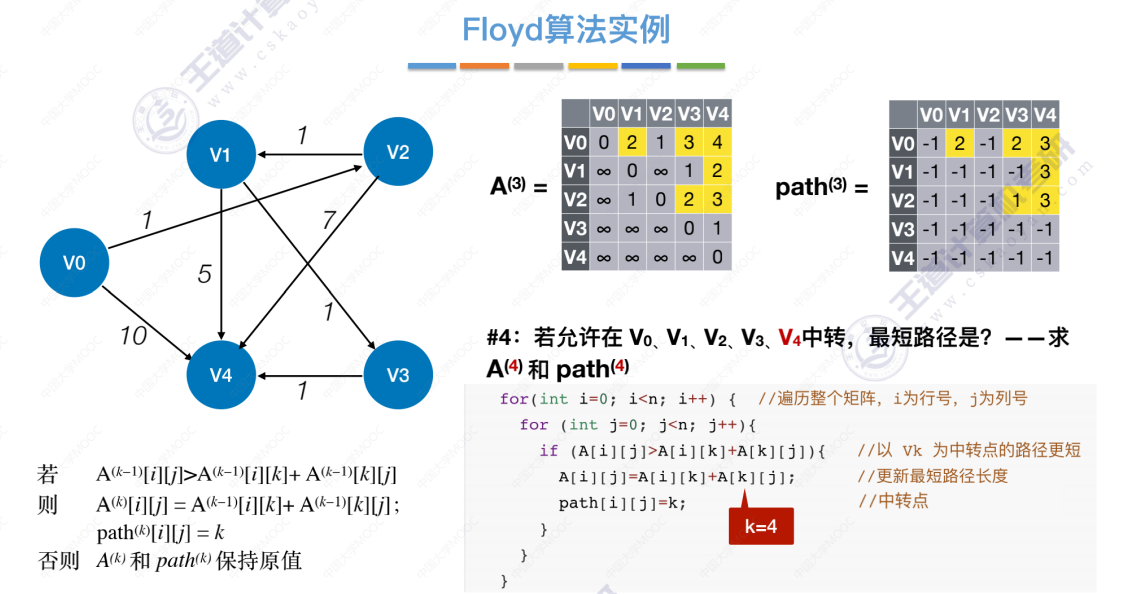
允许中转点V0、V1、V2、V3、V4
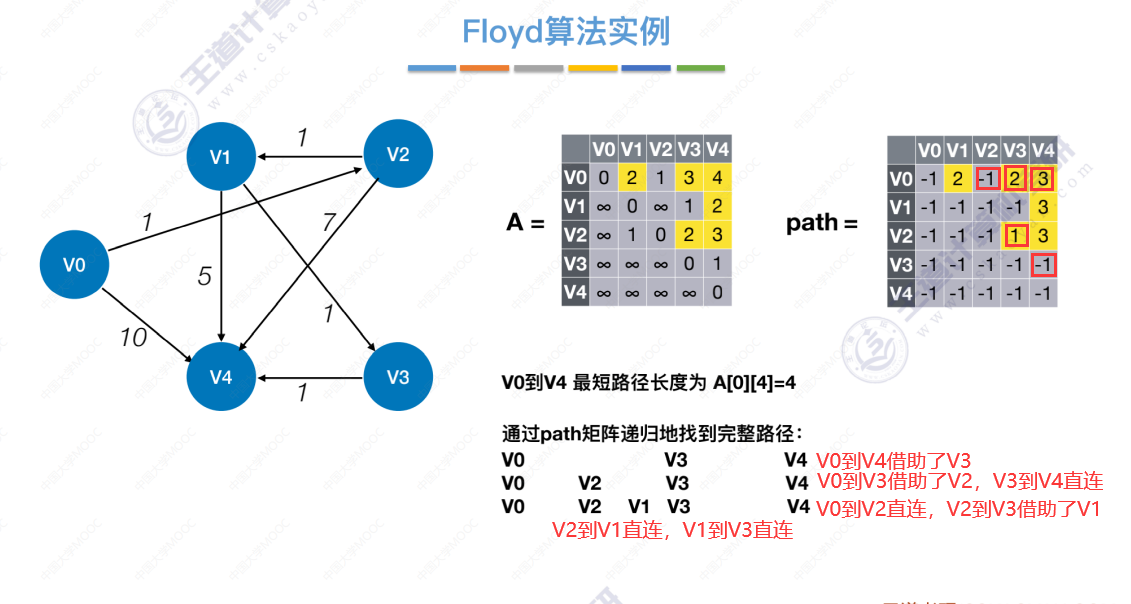
使用数组信息(A、path)找出最短路径
Floyd算法可以用于负权图
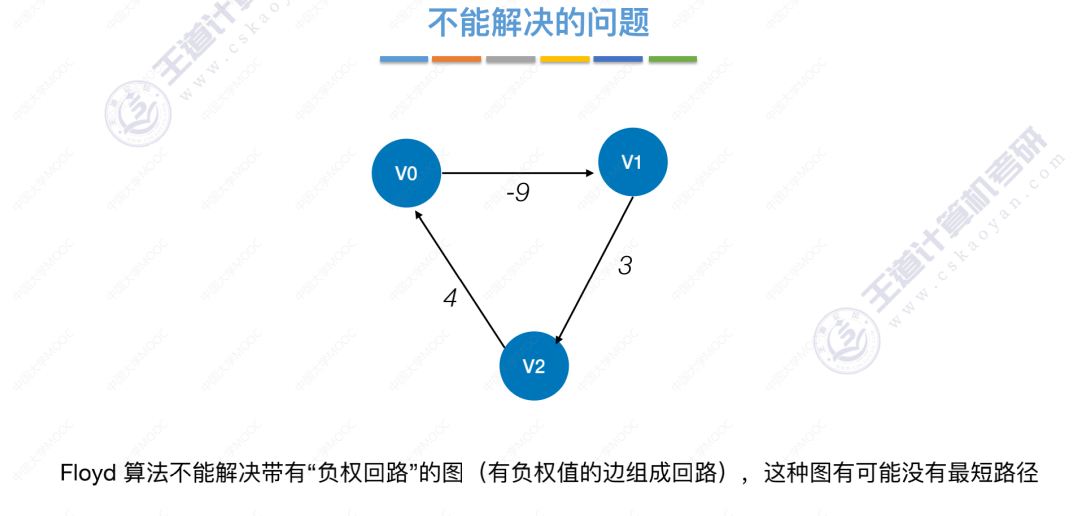
弗洛伊德算法不能解决的问题
比如从V0走到V1是-9,
如果V0->V1->V2->V0->V1是-9+(3+4±9)=-9±2=-11
这样每走一圈,V0到V1的最短路径就更小一次,没有尽头,无穷无尽。
最小路径总结

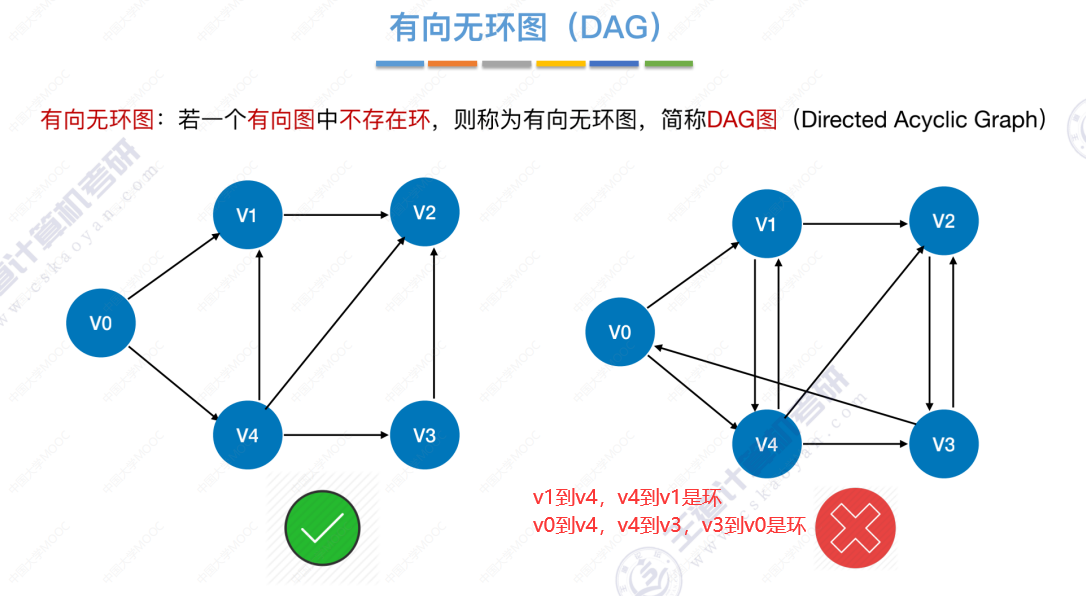
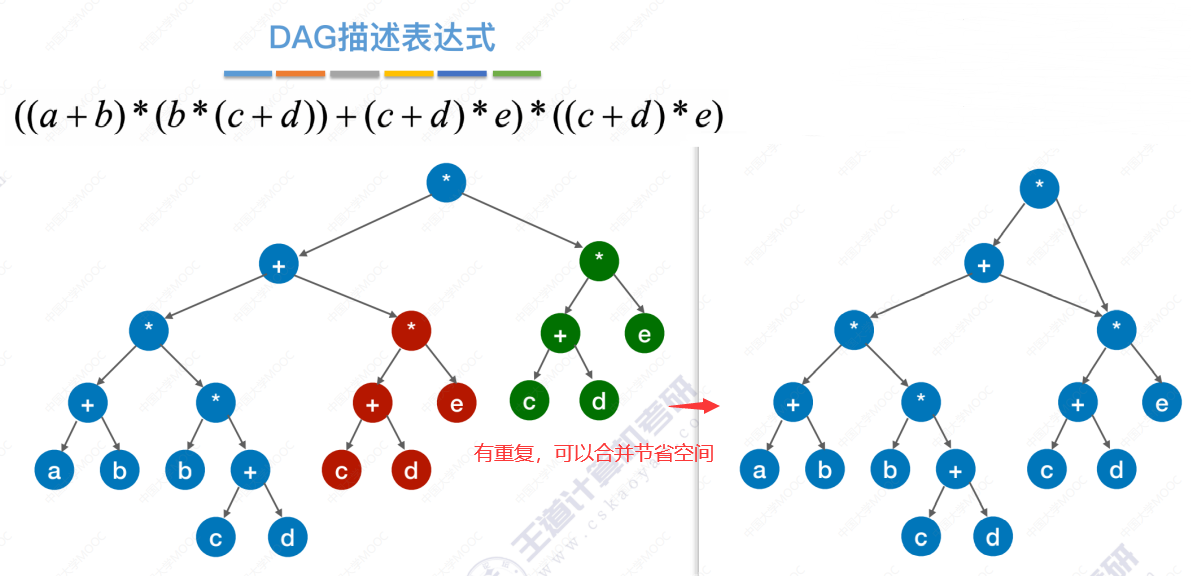
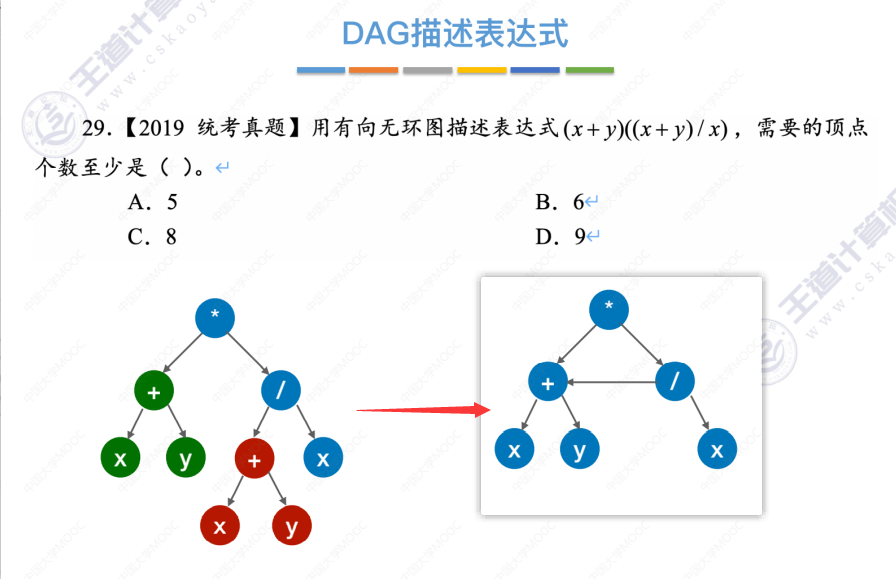
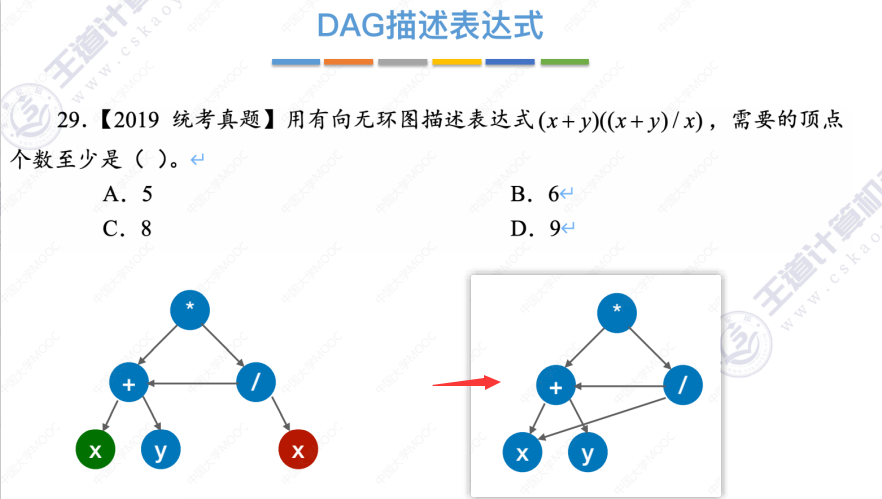
6.4-5 有向无环图描述表达式
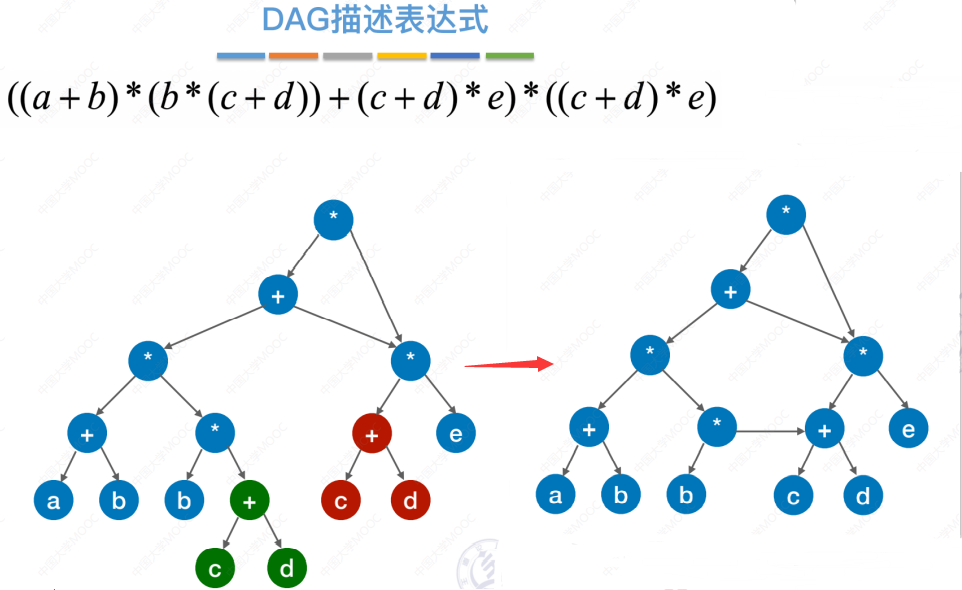
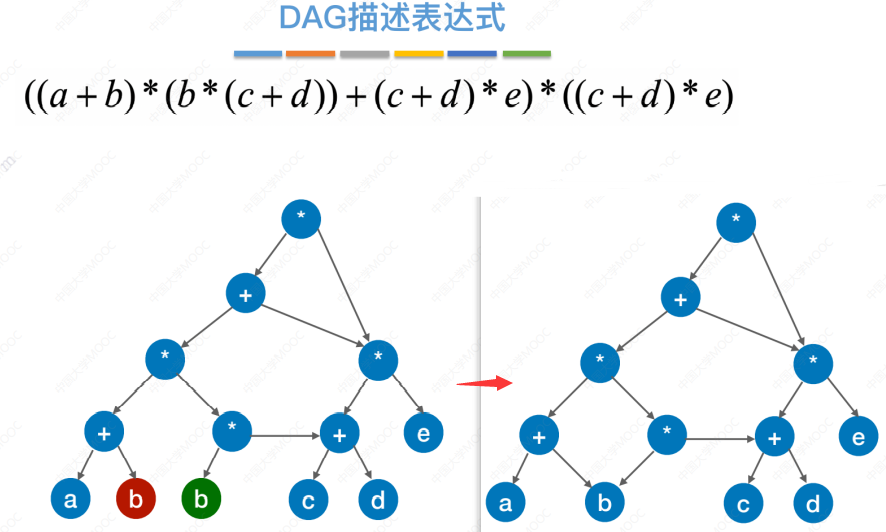
将一棵树简化成有向无环图的过程
一道练习(答案是A.5)
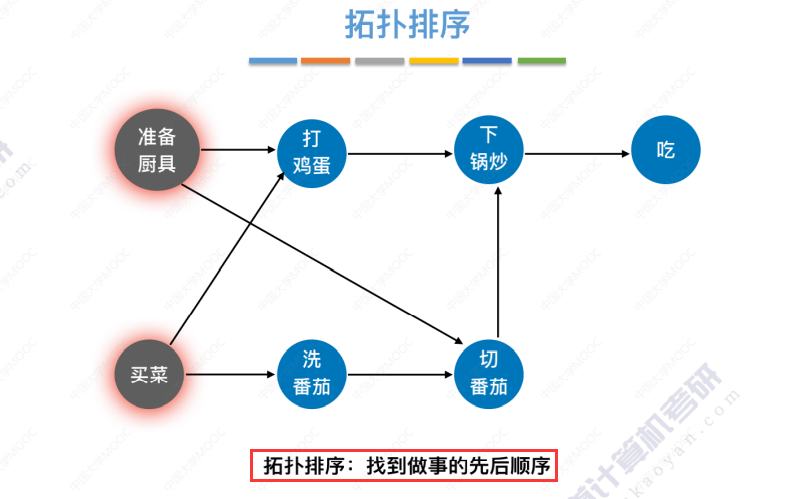
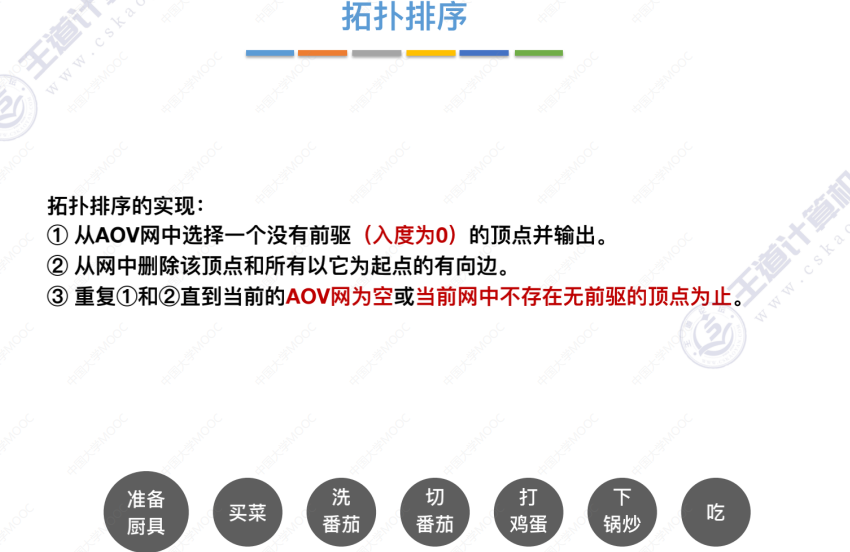
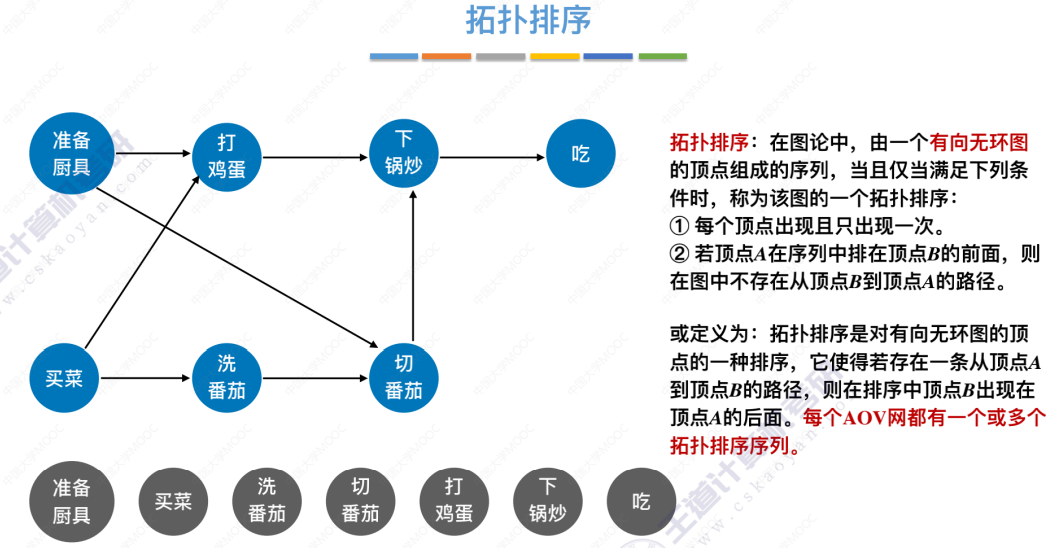
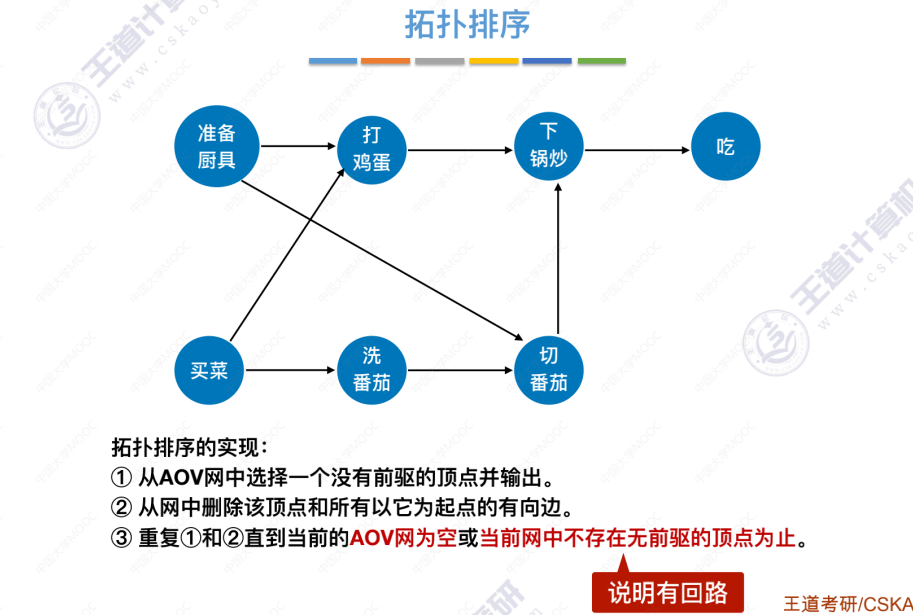
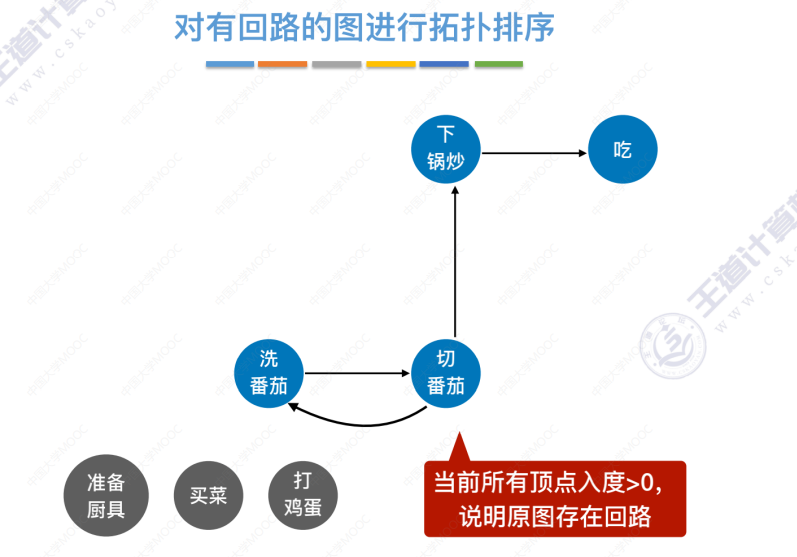
6.4-6 拓扑排序
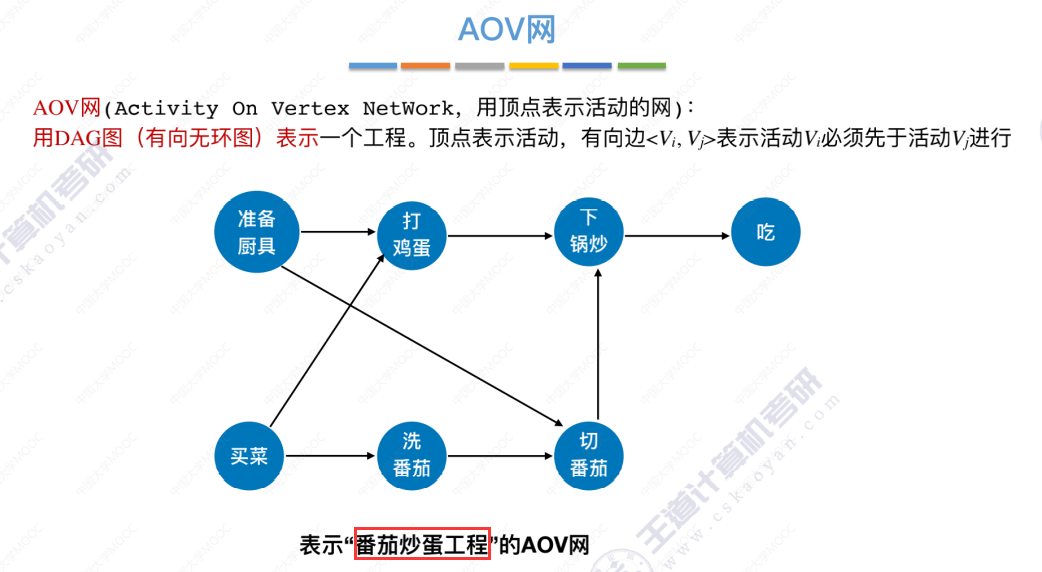
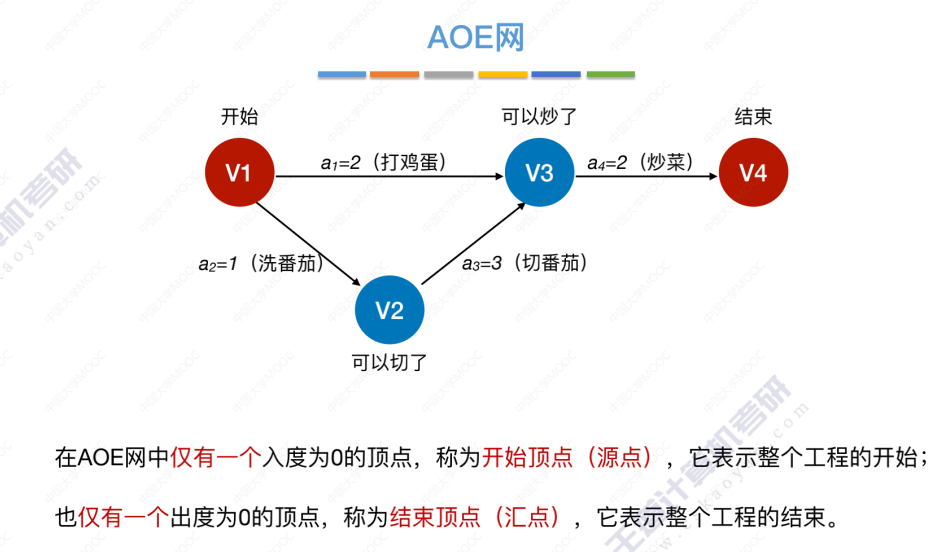
AOV网
拓扑排序引入
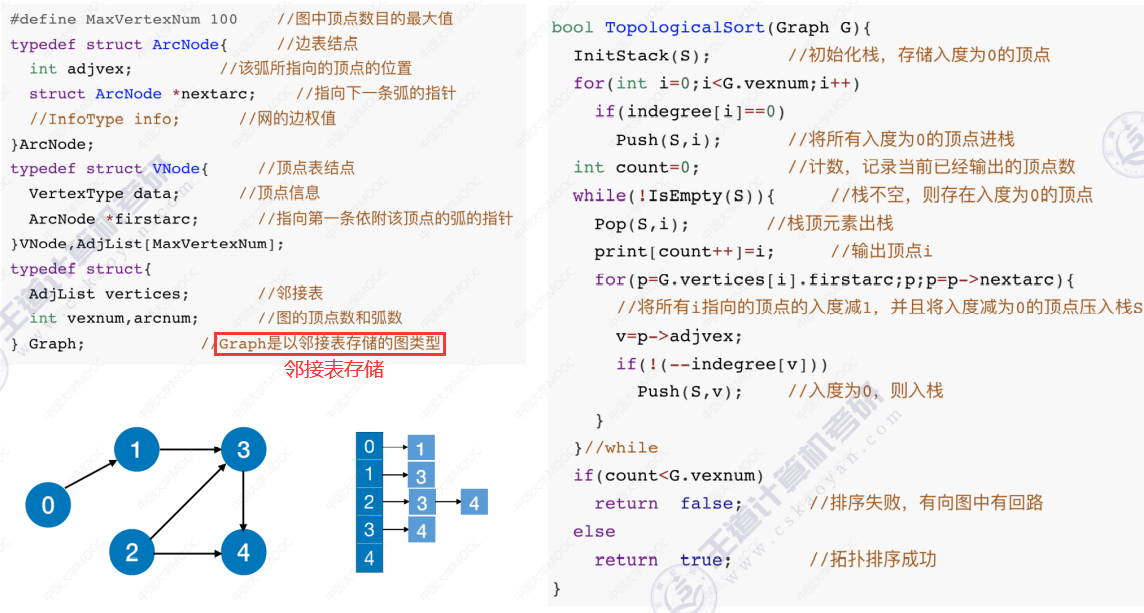
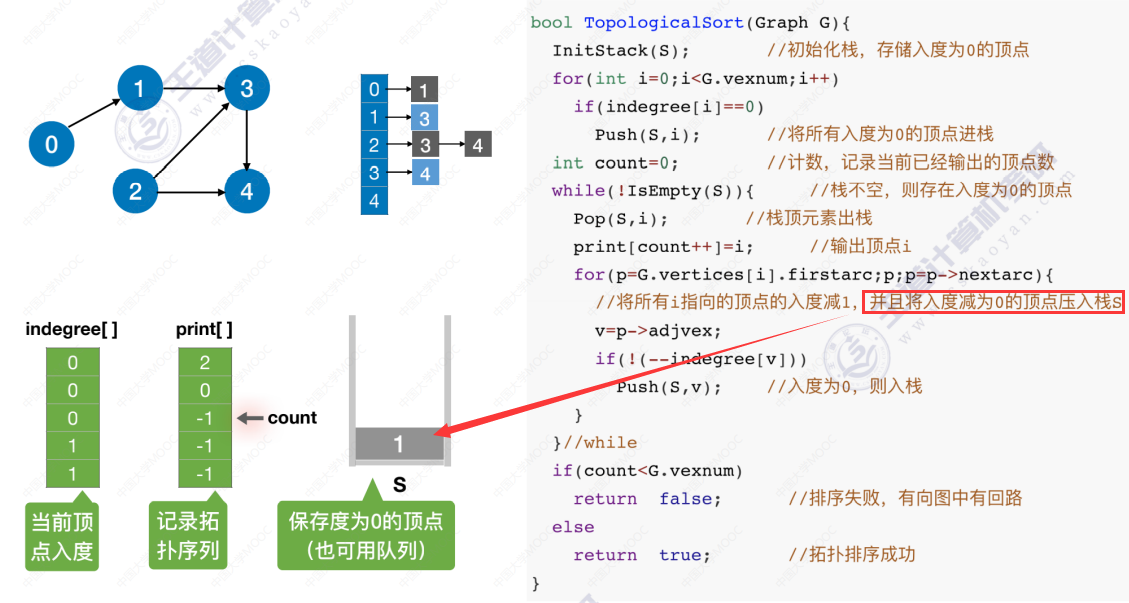
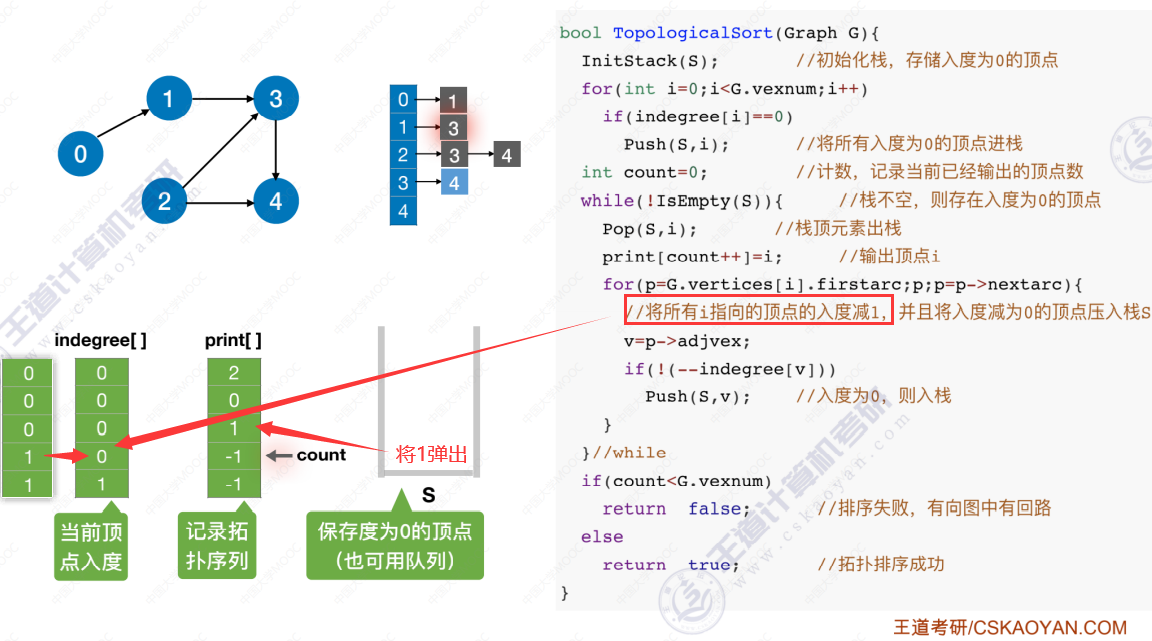
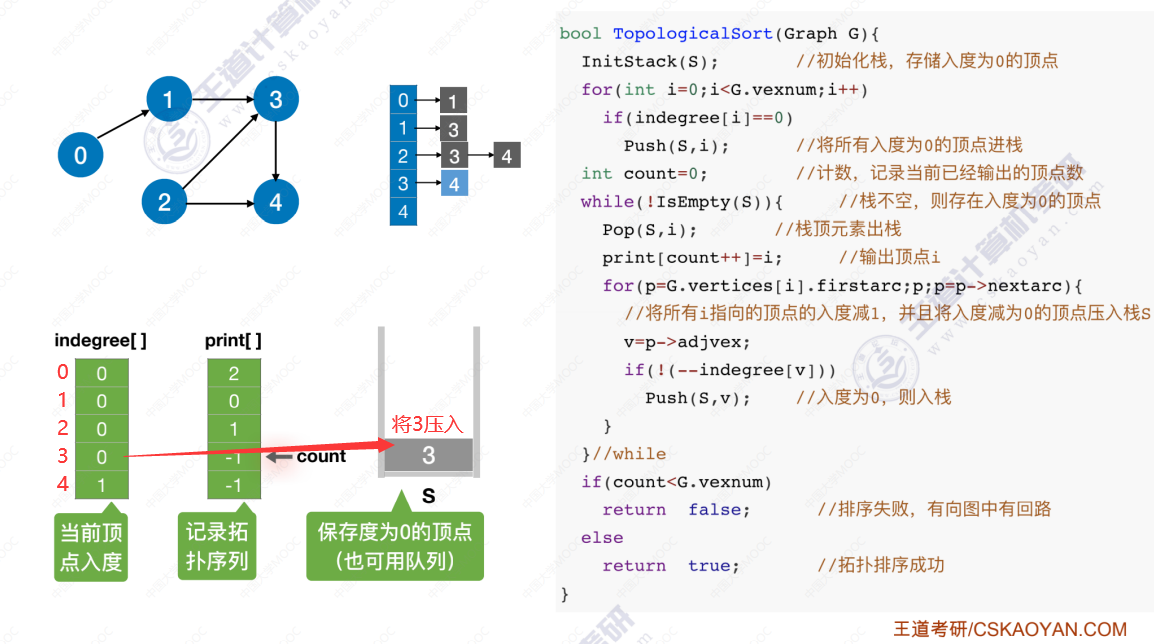
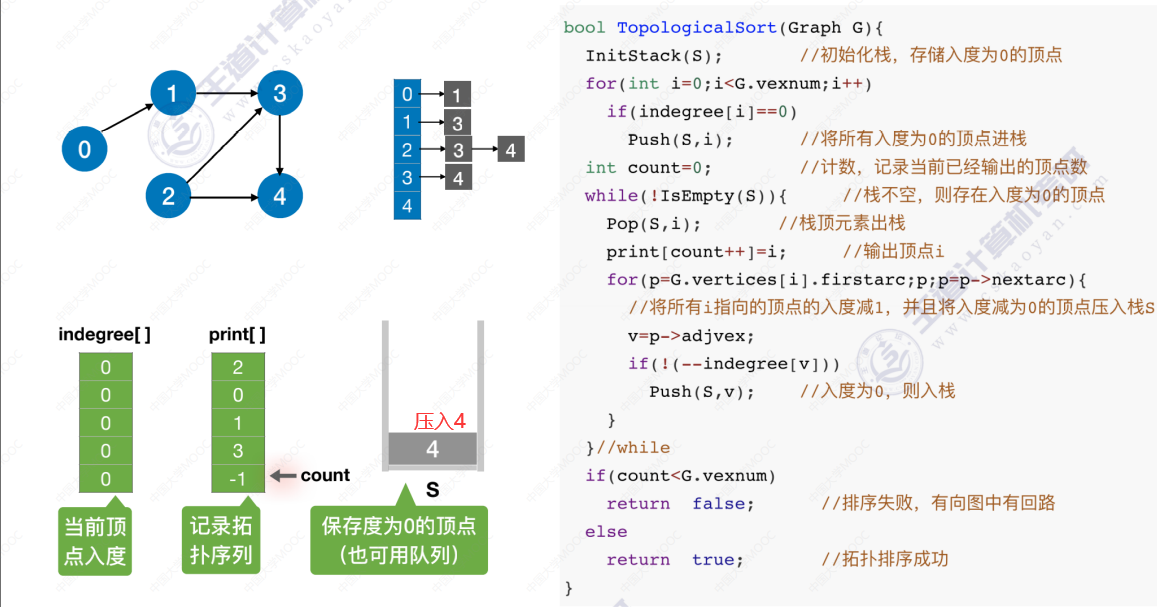
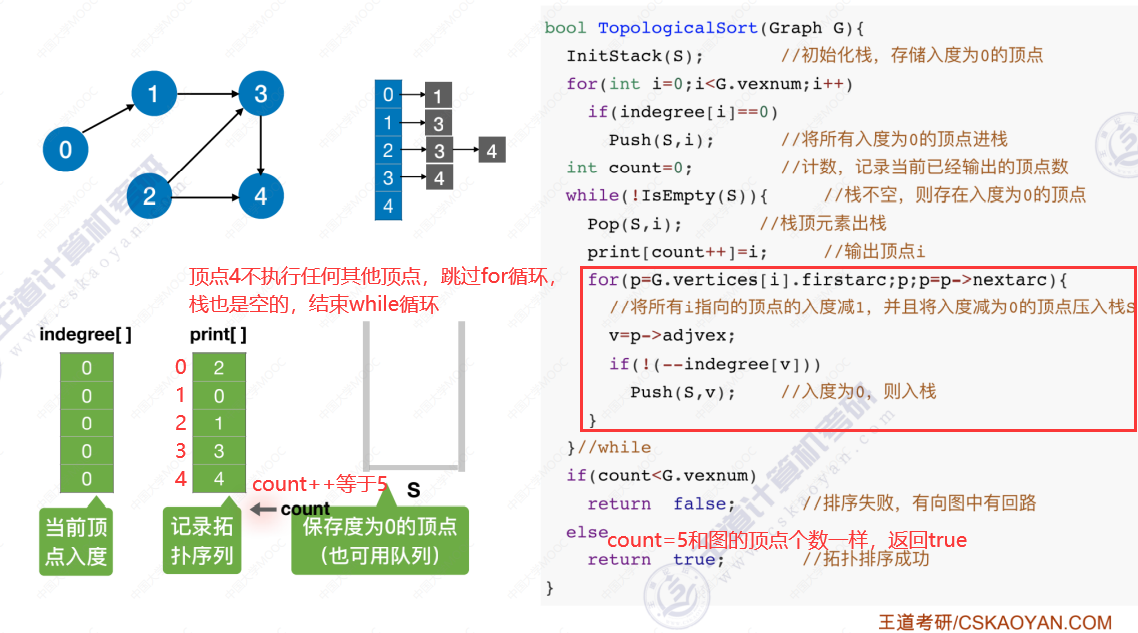
拓扑排序代码实现
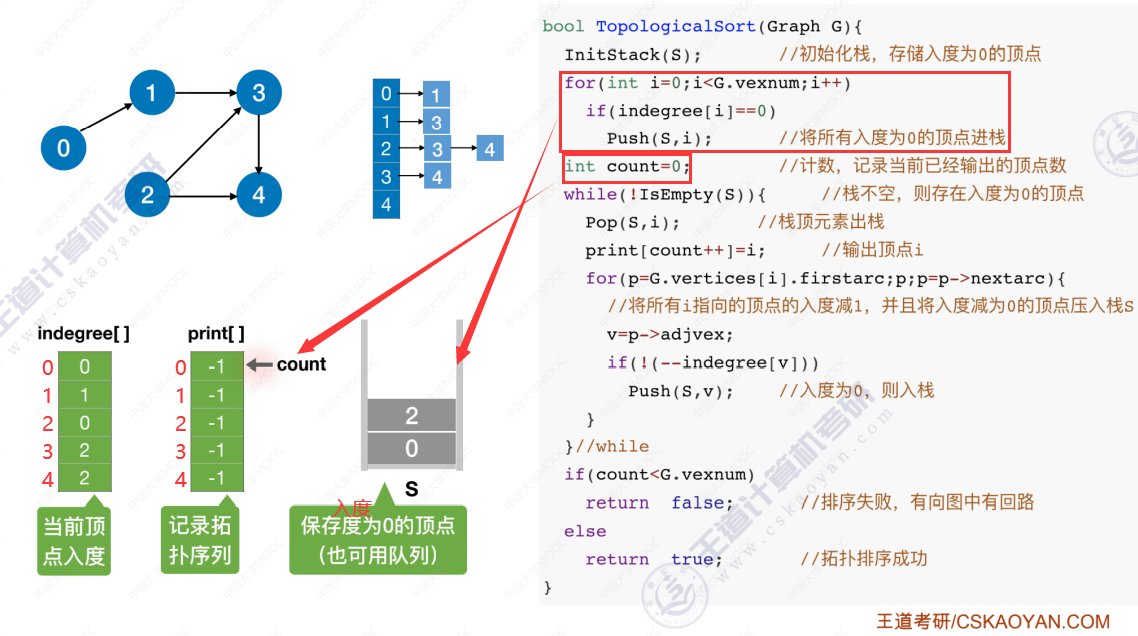
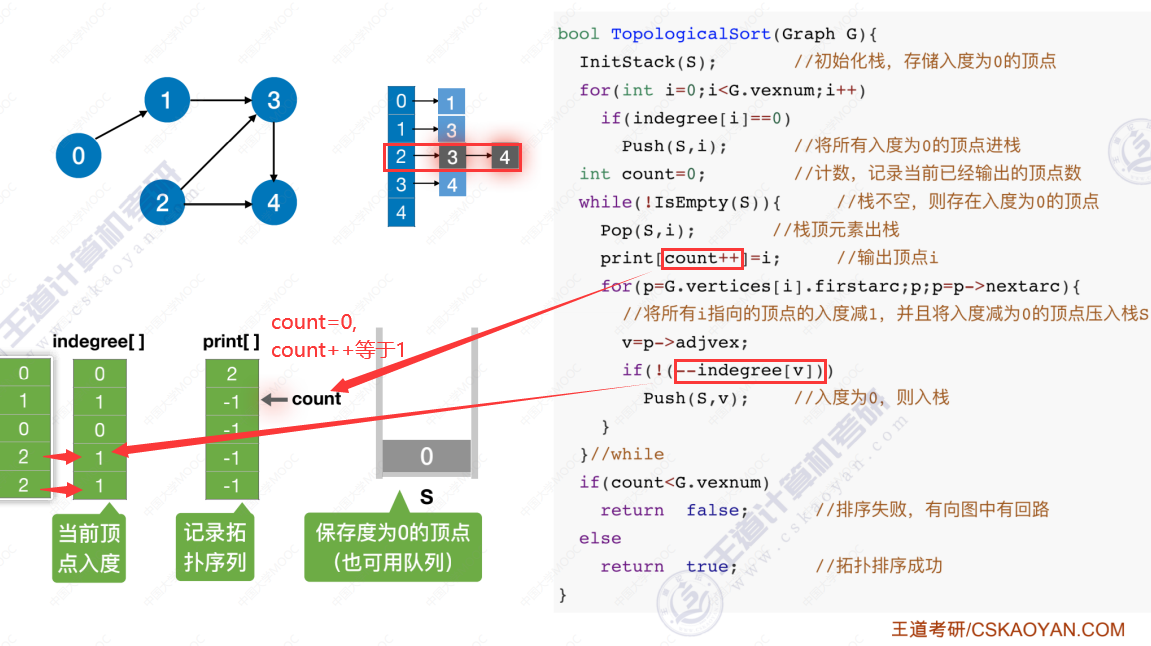
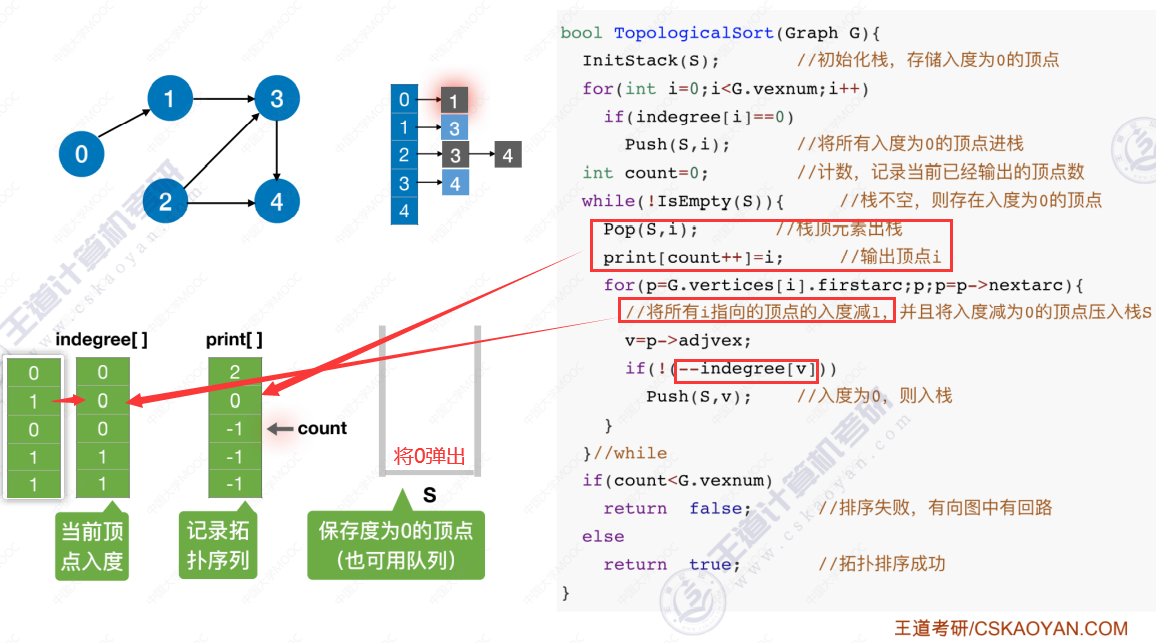
代码实现过程

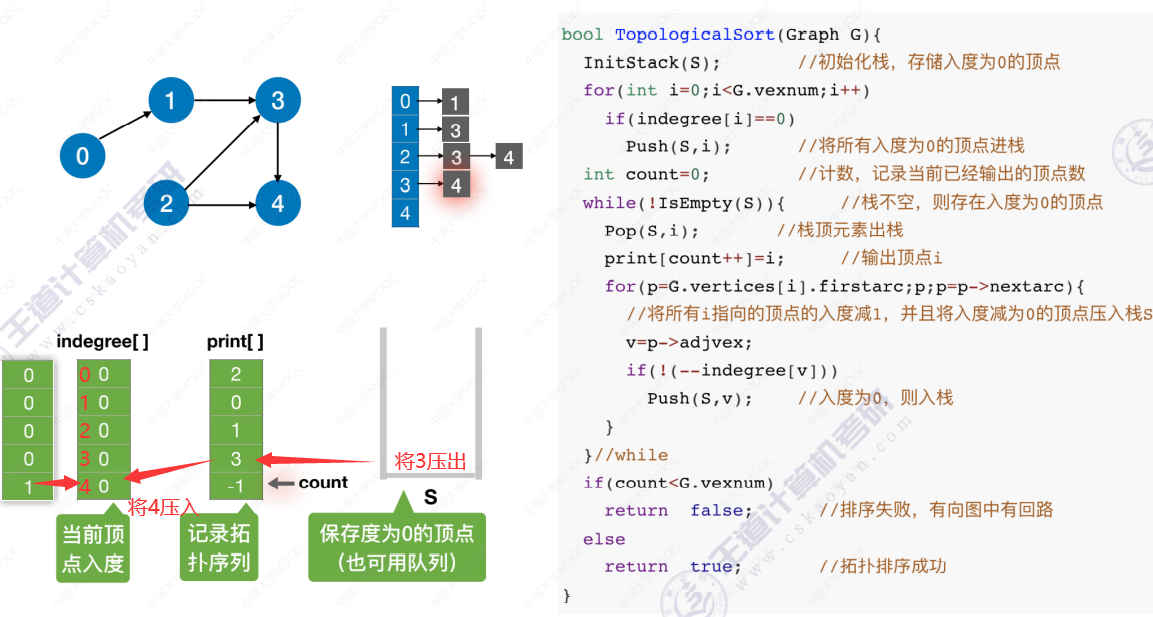
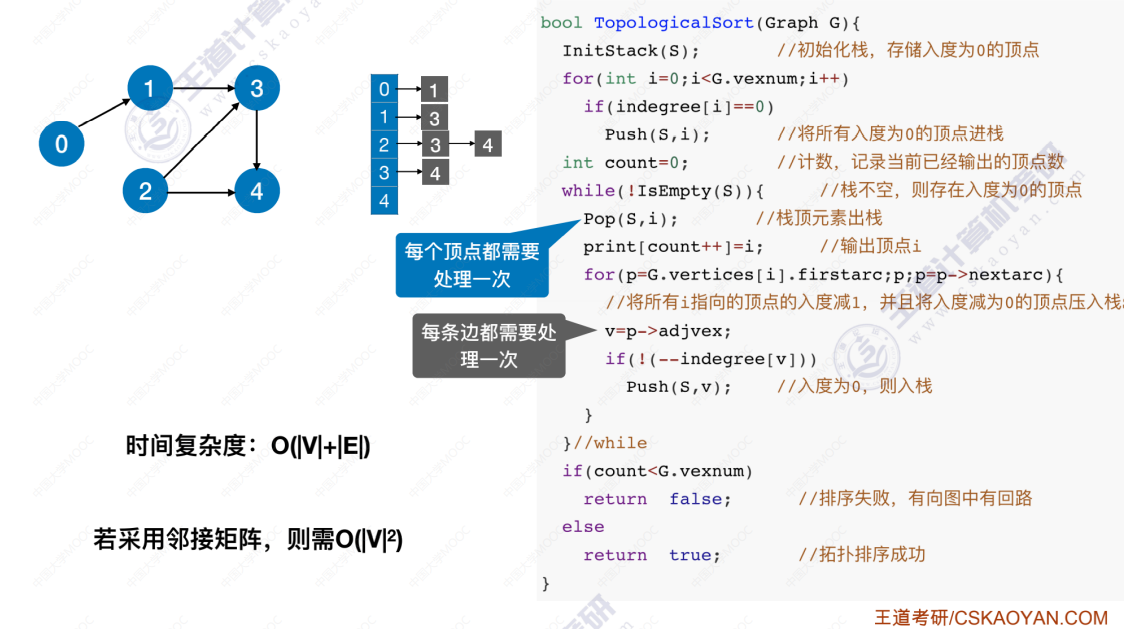
时间复杂度分析
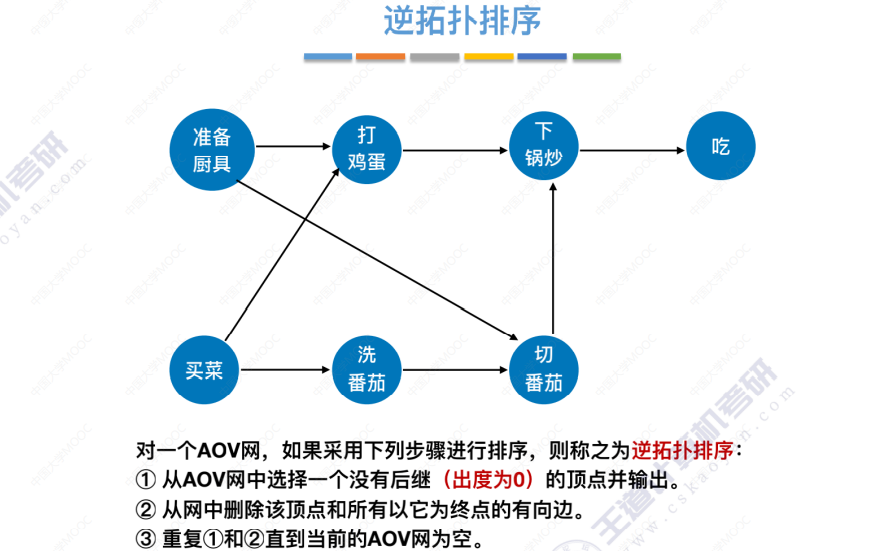
逆拓扑排序
逆拓扑排序引入

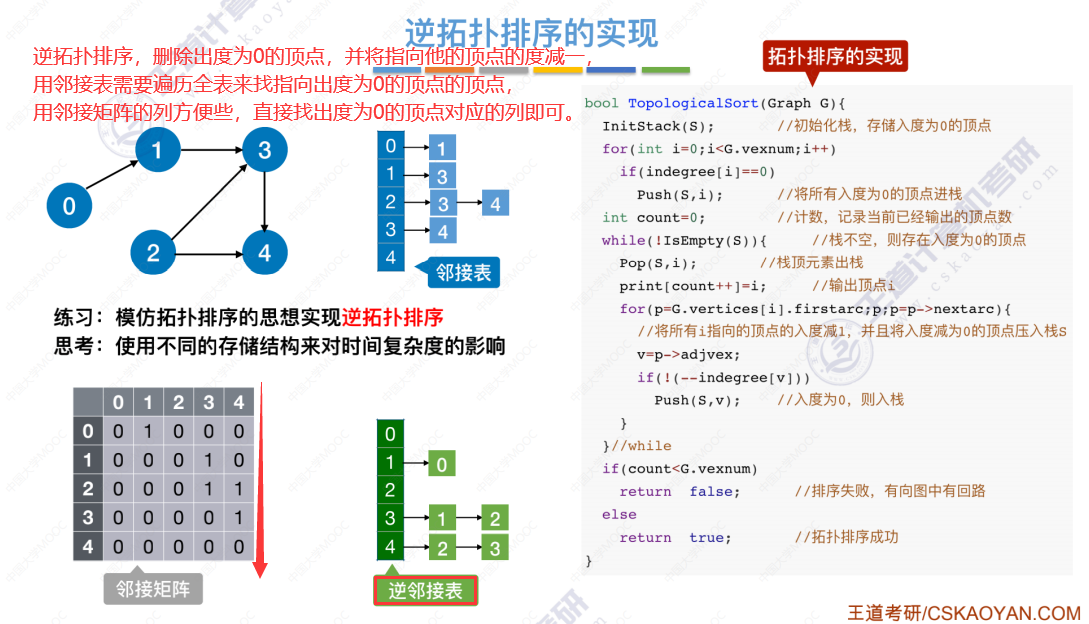
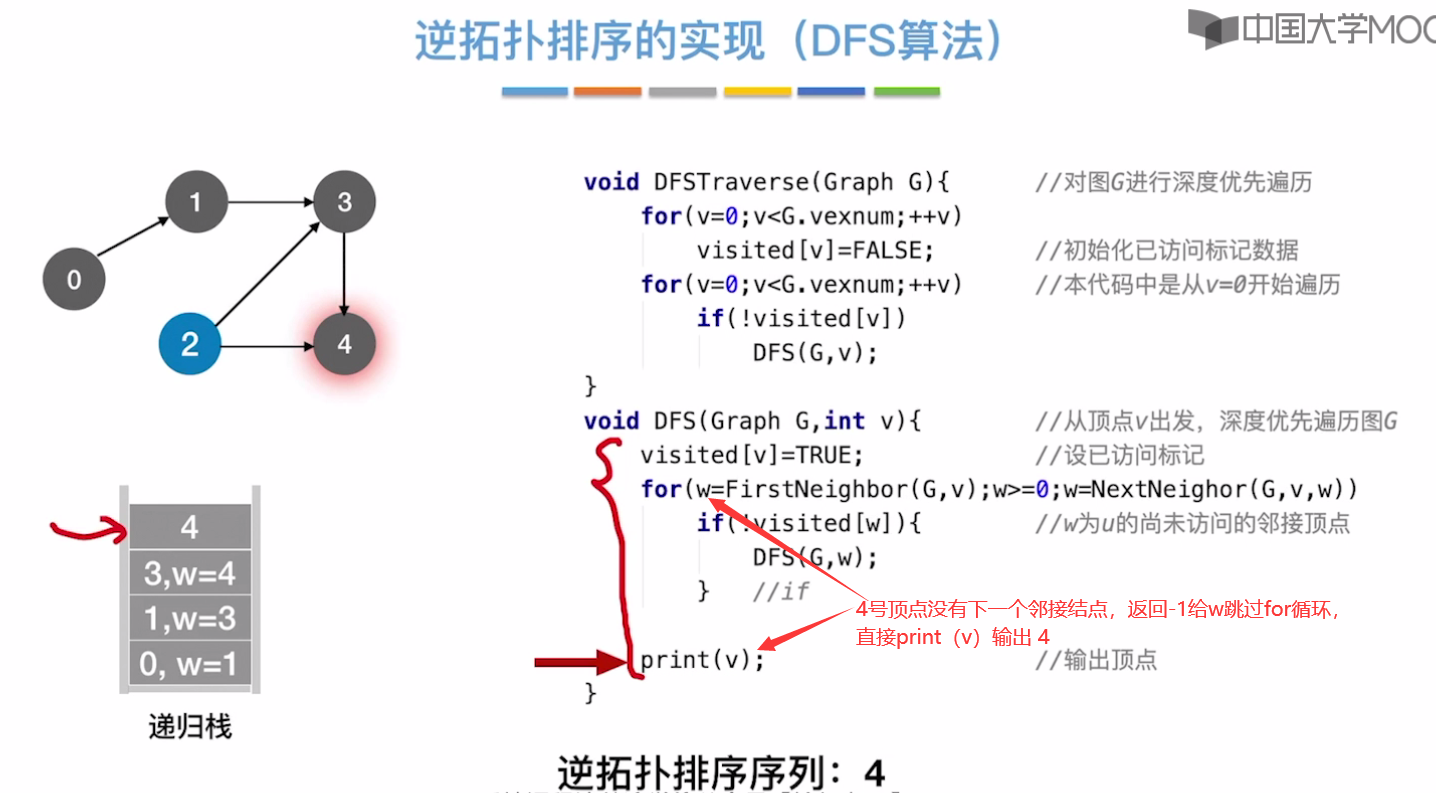
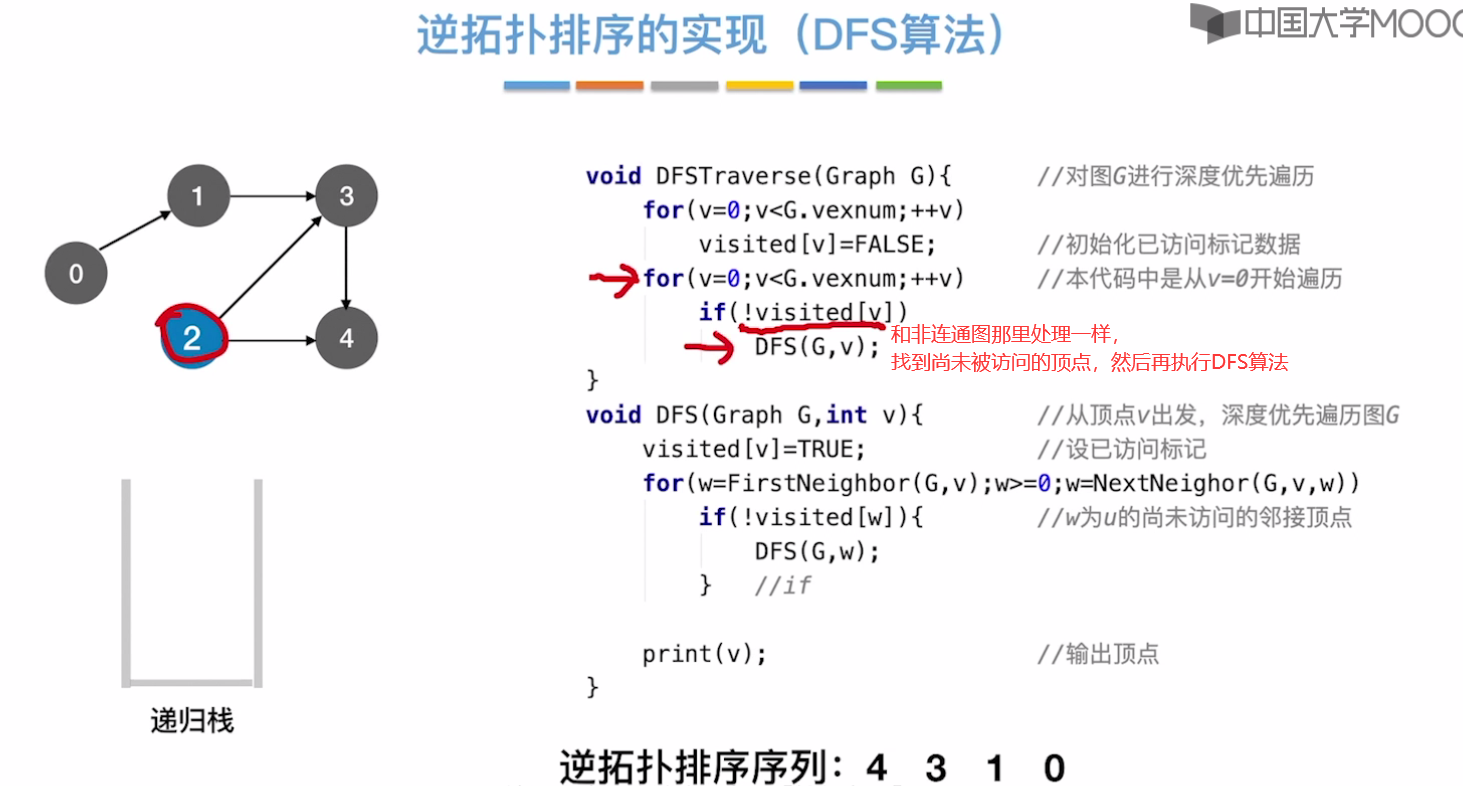
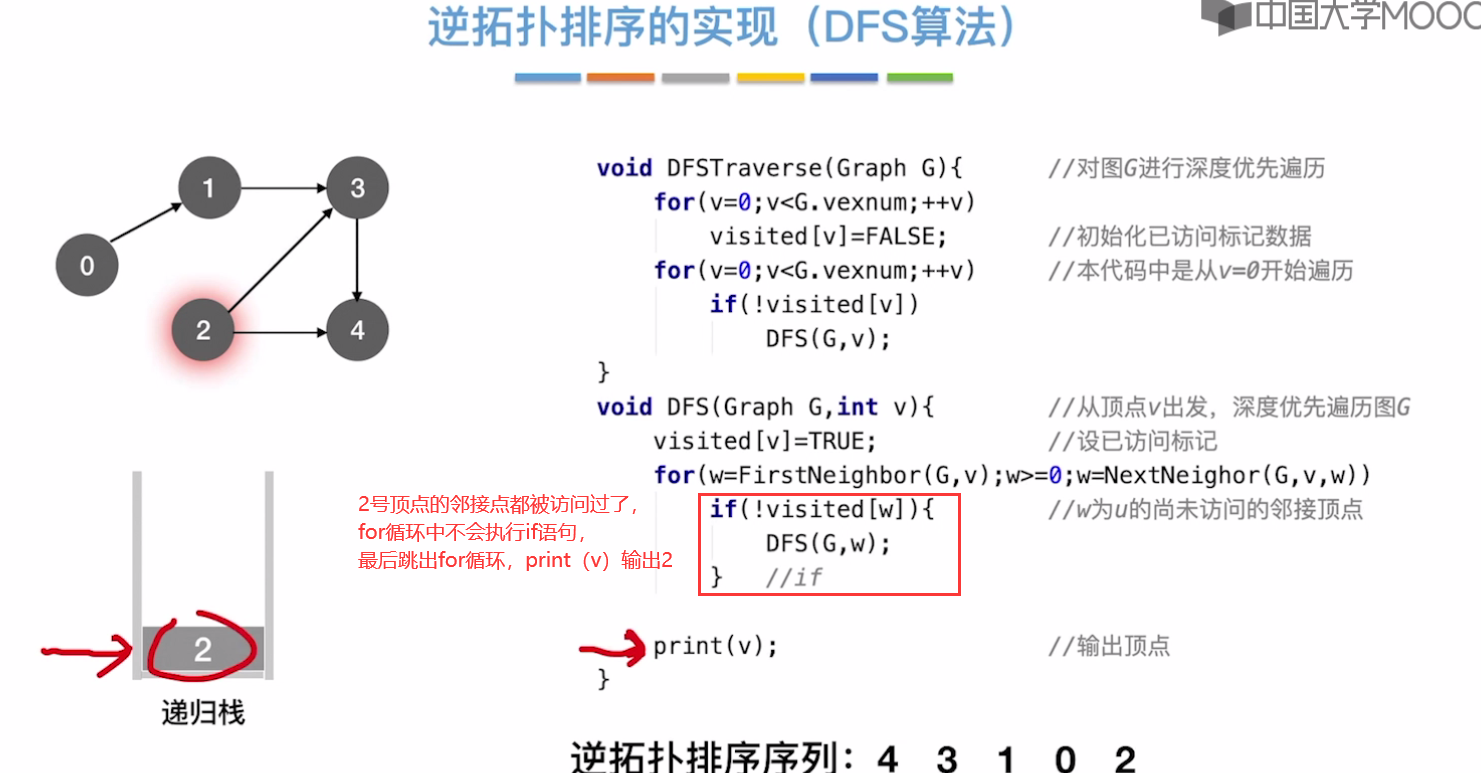
逆拓扑排序的实现(DFS算法深度优先)
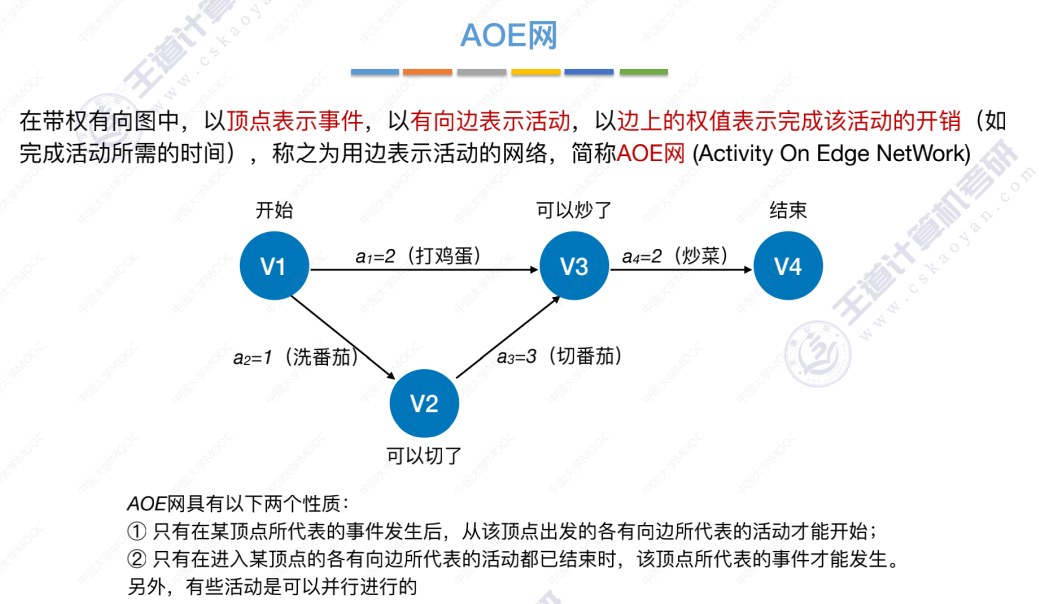
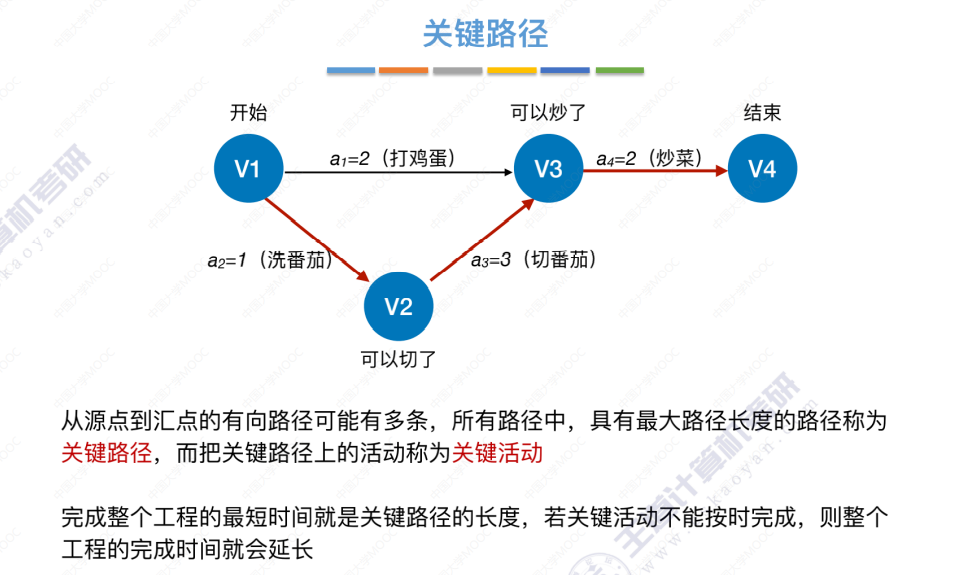
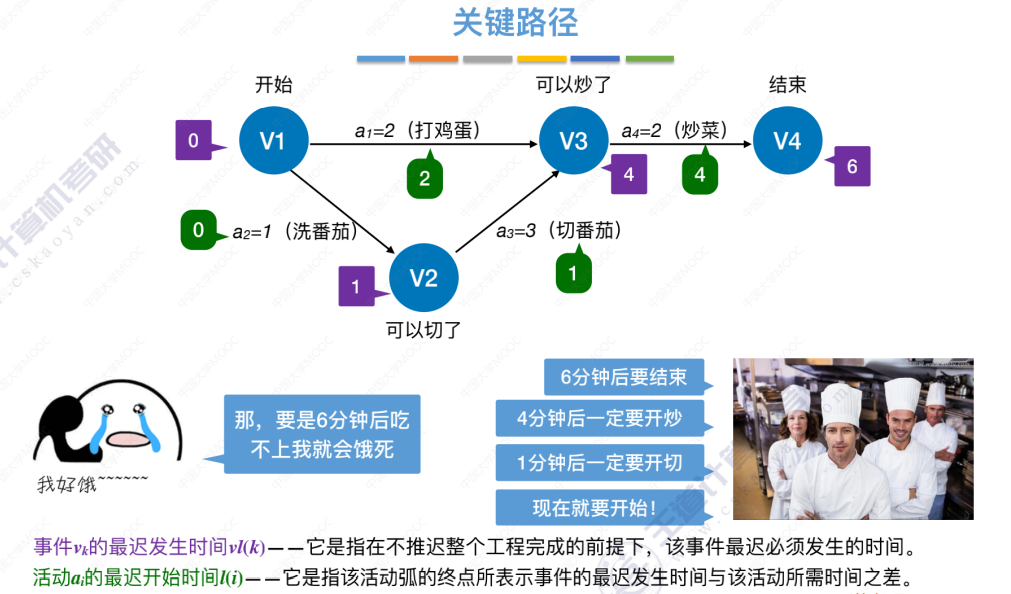
6.4-7 关键路径
概念引入
事件是一瞬间完成的。
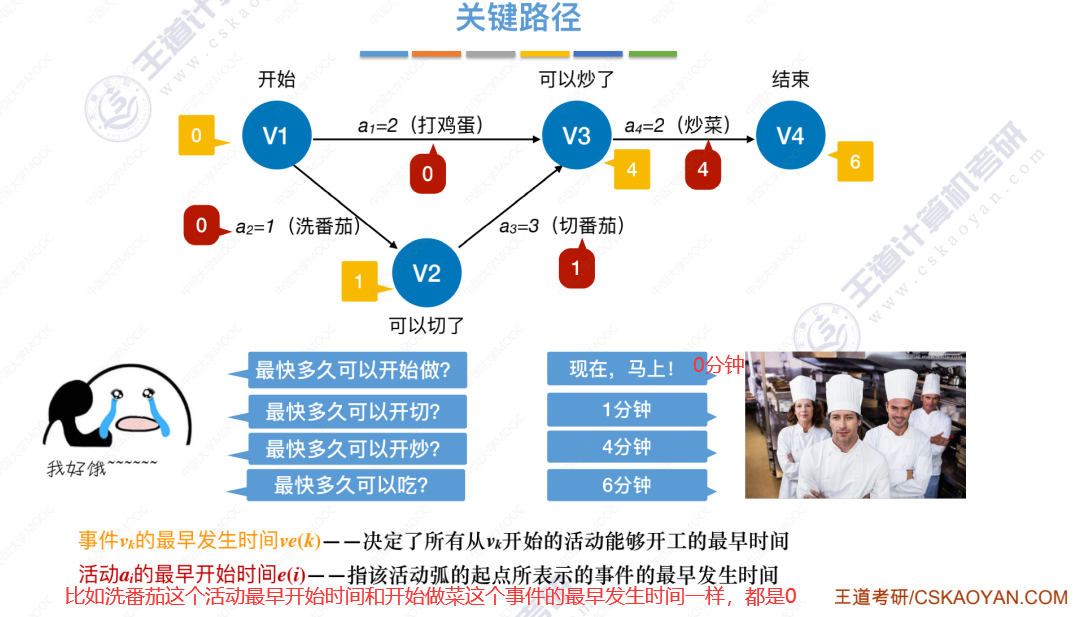
求关键路径的步骤
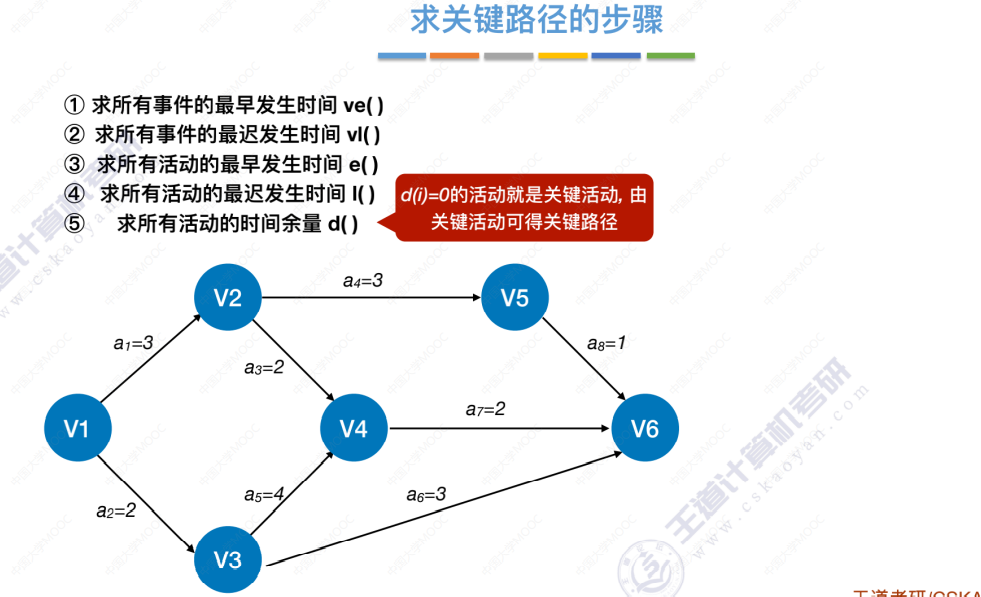
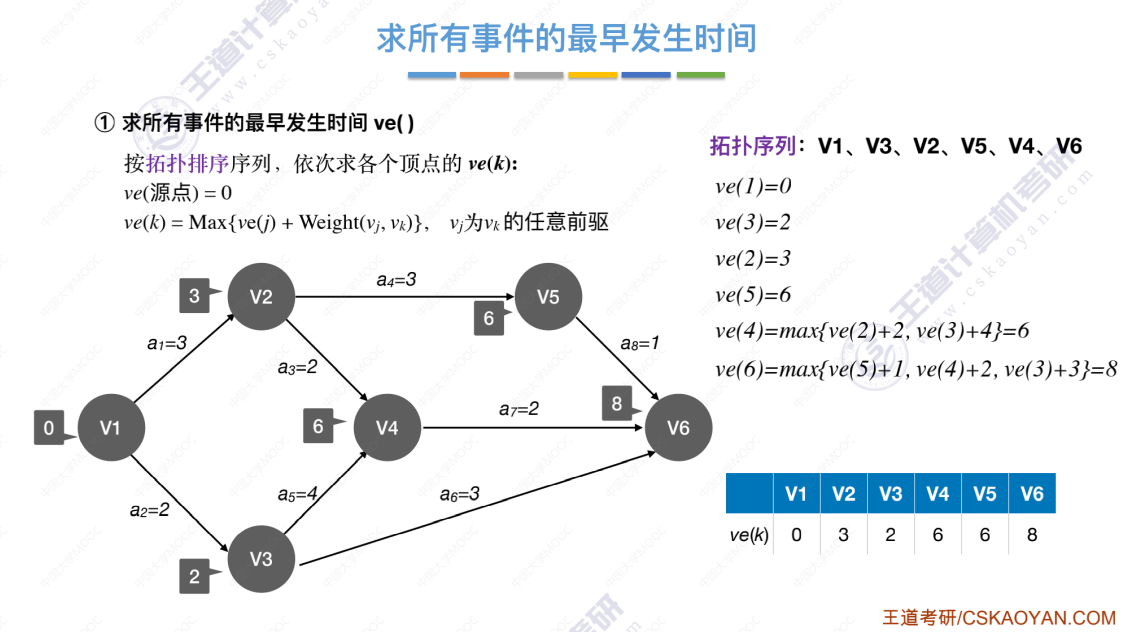
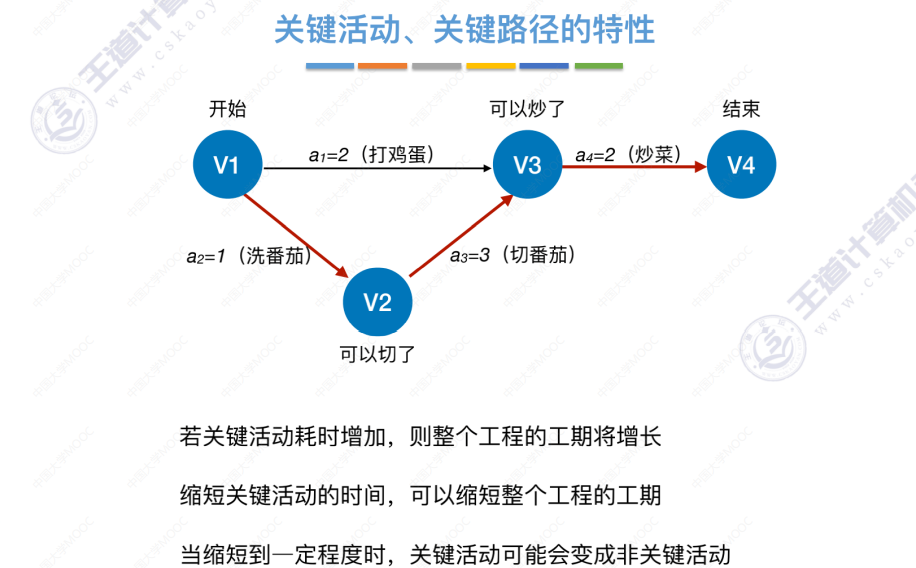
1、求所有 事件 的最早发生时间
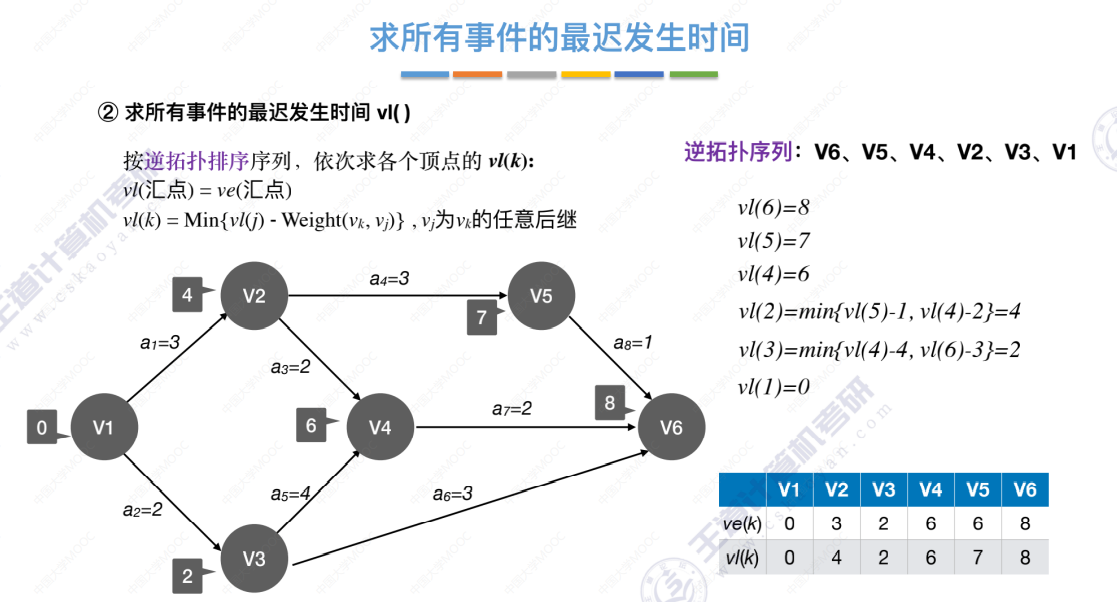
2、求所有 事件 的最迟发生时间
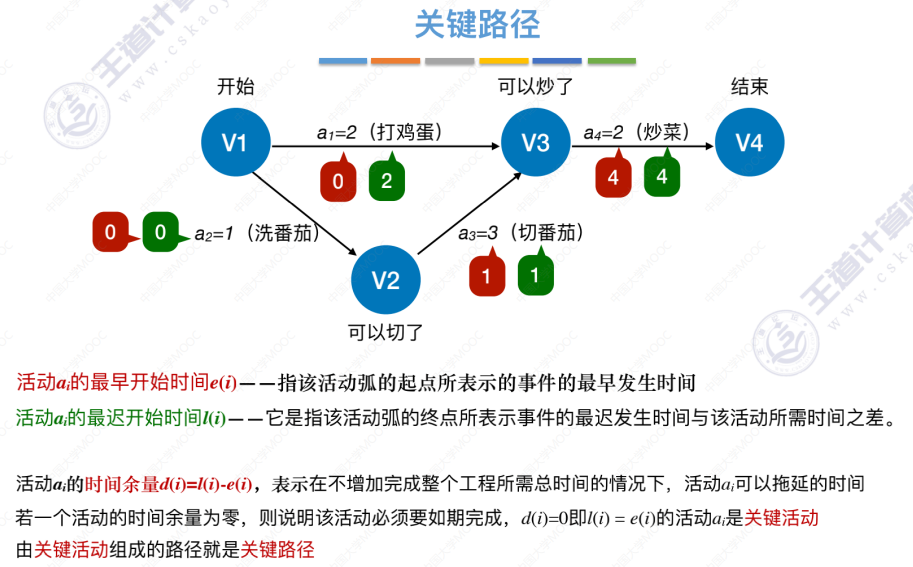
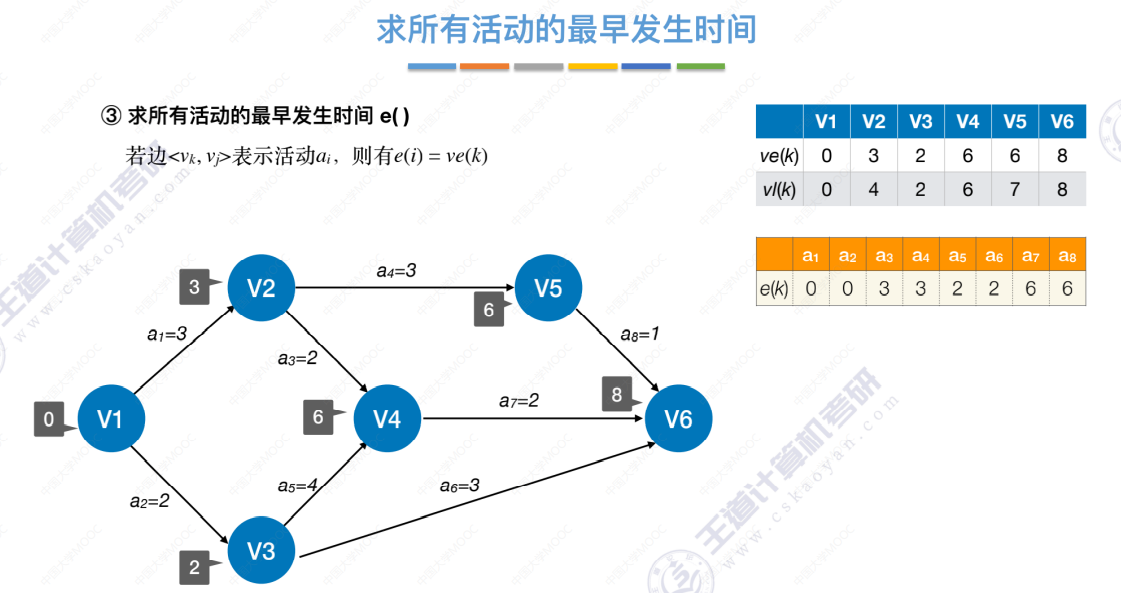
3、求所有 活动 的最早发生时间
每个活动的最早发生时间,就是这个活动的弧尾所连的这个事件的最早发生时间
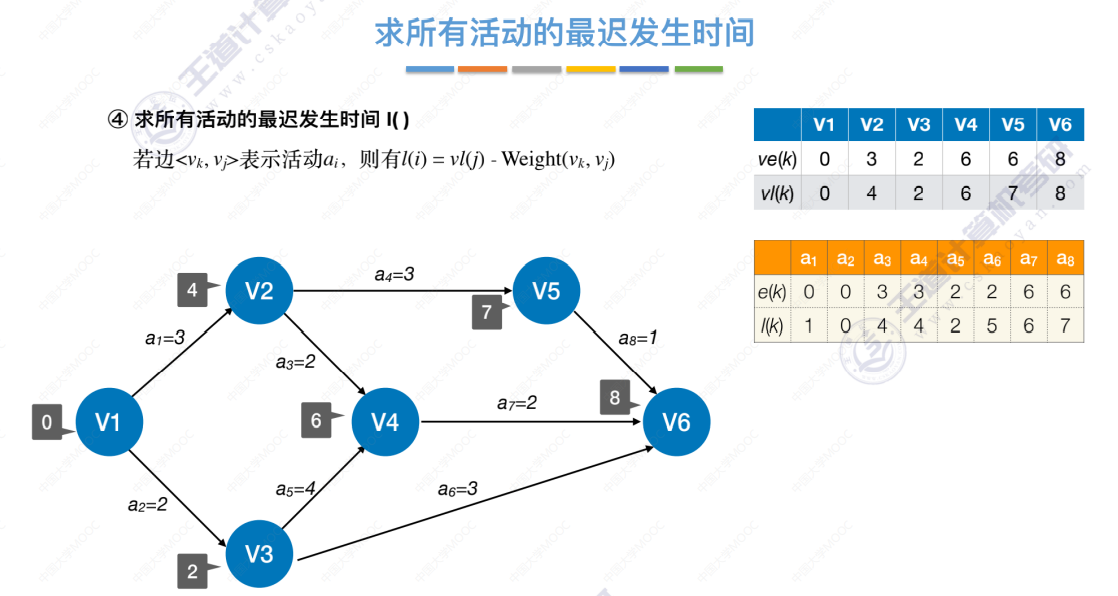
4、求所有 活动 的最迟发生时间
5、求所有 活动 的时间余量d()
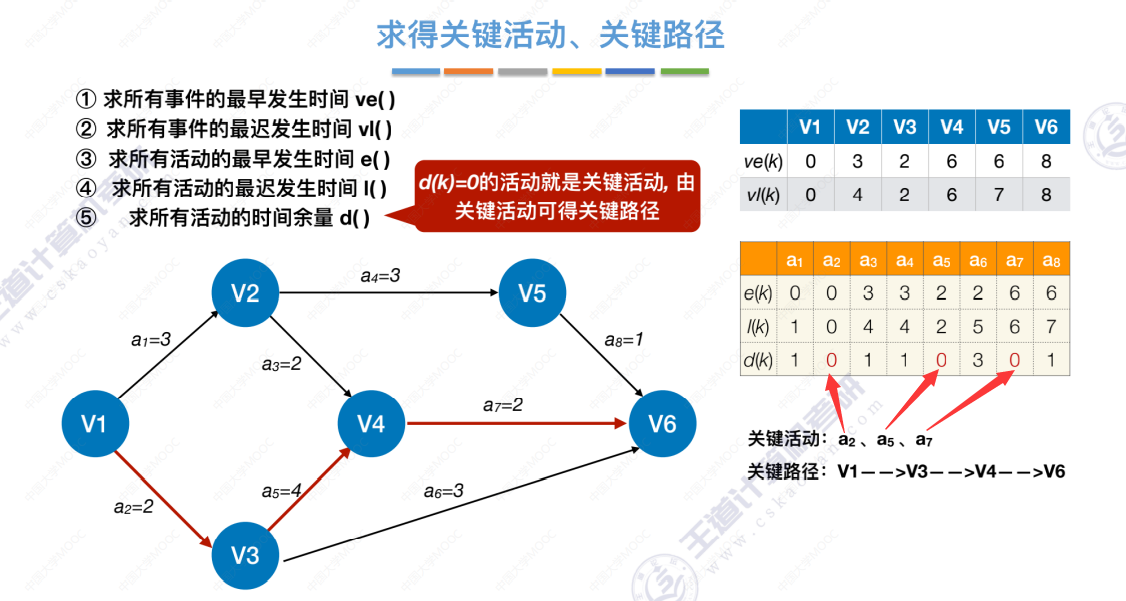
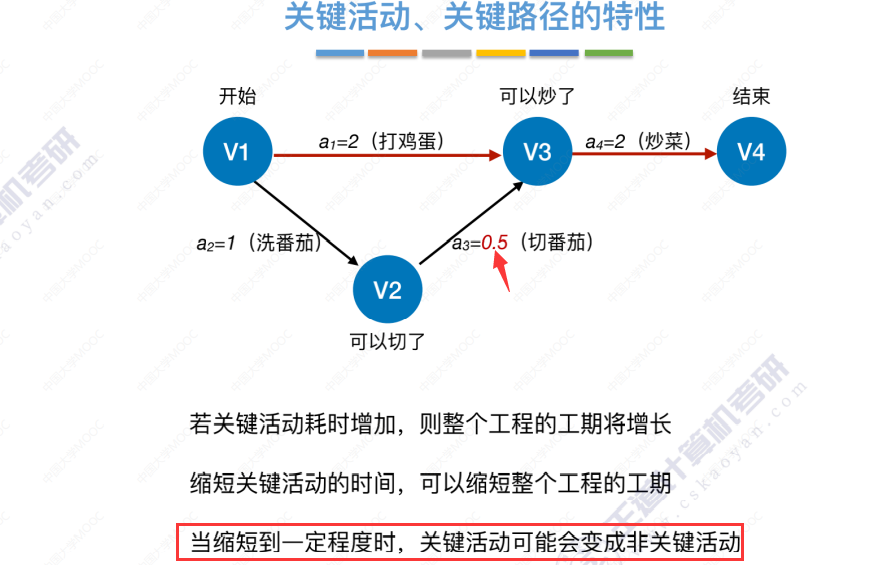
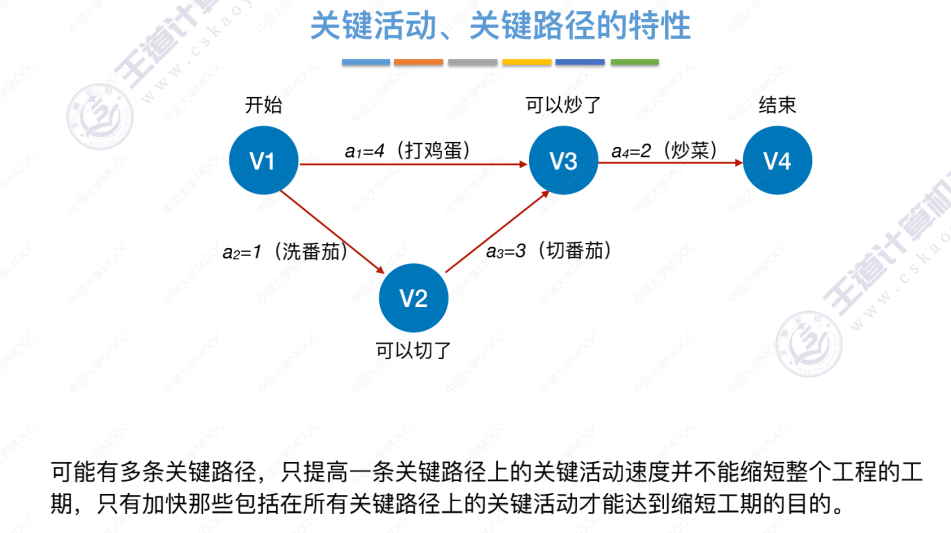
关键活动、关键路径的特性
-
相关阅读:
力扣每日一题53:最大子数组和
数据结构——树
按关键字搜索商品详情销量的步骤教学
合格的期货开户客户经理是新手福音
OncoGPT1:肿瘤学领域大模型
MFC Windows 程序设计[215]之精美登录框的实现(附源码)
2022年17 份各个大厂的面试真题
【LoadRunner】博客笔记项目 性能测试报告
PID原理及python简单实现与调参
当公路的规则与秩序,被昇腾AI时刻守护
- 原文地址:https://blog.csdn.net/qq_32480989/article/details/126193687

