-
【Gazebo入门教程】第三讲 SDF文件的静/动态编程建模
【Gazebo入门教程】第三讲 SDF文件的静/动态编程建模

一、自定义模型并导入Gazebo
- 内容简介:本节内容以一个两轮移动机器人为例,使用差动驱动机构运动,从无到有,使用SDF完成建模并在Gazebo中完成仿真,重点在于通过建模的细致流程掌握如何使用SDF文件和Gazebo软件完成机器人仿真。
1. 基础操作准备
- 注意:Gazebo的模型文件有着严格的要求,具体规则可见SDF格式
\qquad ① 创建模型目录
mkdir -p ~/.gazebo/models/my_robot- 1
\qquad ② 创建模型配置文件
gedit ~/.gazebo/models/my_robot/model.config- 1
\qquad 元数据(config)内容如下:
<model> <name>My Robotname> <version>1.0version> <sdf version='1.4'>model.sdfsdf> <author> <name>My Namename> <email>me@my.emailemail> author> <description> My awesome robot. description> model>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
\qquad ② 创建模型配置文件
gedit ~/.gazebo/models/my_robot/model.sdf- 1
\qquad 必要标记(sdf)内容如下:
<sdf version='1.4'> <model name="my_robot"> model> sdf>- 1
- 2
- 3
- 4
- 5
2. 建立模型基础部件(静态)
- 基本要求:本节内容主要是单独创建机器人的各部件,例如底座、轮子等,不涉及相关关节连杆等链接内容,重点在于对齐组件,故模型为静态,忽略物理效果。
\qquad ① 令机器人模型静态
注意:在static标签后将会在link标签下生成对应部件,通过collision的name隔开,故在后代码展示中则会忽略一部分,请自行补充
<sdf version='1.4'> <model name="my_robot"> <static>truestatic> model> sdf>- 1
- 2
- 3
- 4
- 5
- 6
\qquad ② 创建长方体的底座
代码解释:
- box 标签,用于产生对应尺寸的长方体
- collision 标签,指定碰撞尺寸
- visual 标签,指定视觉尺寸,常见情况下与collision相同
<sdf version='1.4'> <model name="my_robot"> <static>truestatic> <link name='chassis'> <pose>0 0 .1 0 0 0pose> <collision name='collision'> <geometry> <box> <size>.4 .2 .1size> box> geometry> collision> <visual name='visual'> <geometry> <box> <size>.4 .2 .1size> box> geometry> visual> link> model> sdf>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
\qquad ③ 创建脚轮(万向轮)
注意:脚轮固定在底座上,故二者同属一个link
<collision name='caster_collision'> <pose>-0.15 0 -0.05 0 0 0pose> <geometry> <sphere> <radius>.05radius> sphere> geometry> <surface> <friction> <ode> <mu>0mu> <mu2>0mu2> <slip1>1.0slip1> <slip2>1.0slip2> ode> friction> surface> collision> <visual name='caster_visual'> <pose>-0.15 0 -0.05 0 0 0pose> <geometry> <sphere> <radius>.05radius> sphere> geometry> visual> link>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
\qquad ④ 创建前轮和后轮
注意:前轮和后轮分别创建了新的link
<link name="left_wheel"> <pose>0.1 0.13 0.1 0 1.5707 1.5707pose> <collision name="collision"> <geometry> <cylinder> <radius>.1radius> <length>.05length> cylinder> geometry> collision> <visual name="visual"> <geometry> <cylinder> <radius>.1radius> <length>.05length> cylinder> geometry> visual> link> <link name="right_wheel"> <pose>0.1 -0.13 0.1 0 1.5707 1.5707pose> <collision name="collision"> <geometry> <cylinder> <radius>.1radius> <length>.05length> cylinder> geometry> collision> <visual name="visual"> <geometry> <cylinder> <radius>.1radius> <length>.05length> cylinder> geometry> visual> link>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
\qquad ⑤ 导入Gazebo可视化模型
- 使用INSERT导入对应文件夹的模型,可看到模型如下:

注意:修改SDF文件后,只需要删除原有模型重新插入就会更新模型
3. 创建关节连接部件(动态)
- 基本要求:将static设为false,为左右车轮添加铰链关节,关节绕Y轴旋转,将各车轮连接到底盘
<static>falsestatic>- 1
<joint type="revolute" name="left_wheel_hinge"> <pose>0 0 -0.03 0 0 0pose> <child>left_wheelchild> <parent>chassisparent> <axis> <xyz>0 1 0xyz> axis> joint> <joint type="revolute" name="right_wheel_hinge"> <pose>0 0 0.03 0 0 0pose> <child>right_wheelchild> <parent>chassisparent> <axis> <xyz>0 1 0xyz> axis> joint>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
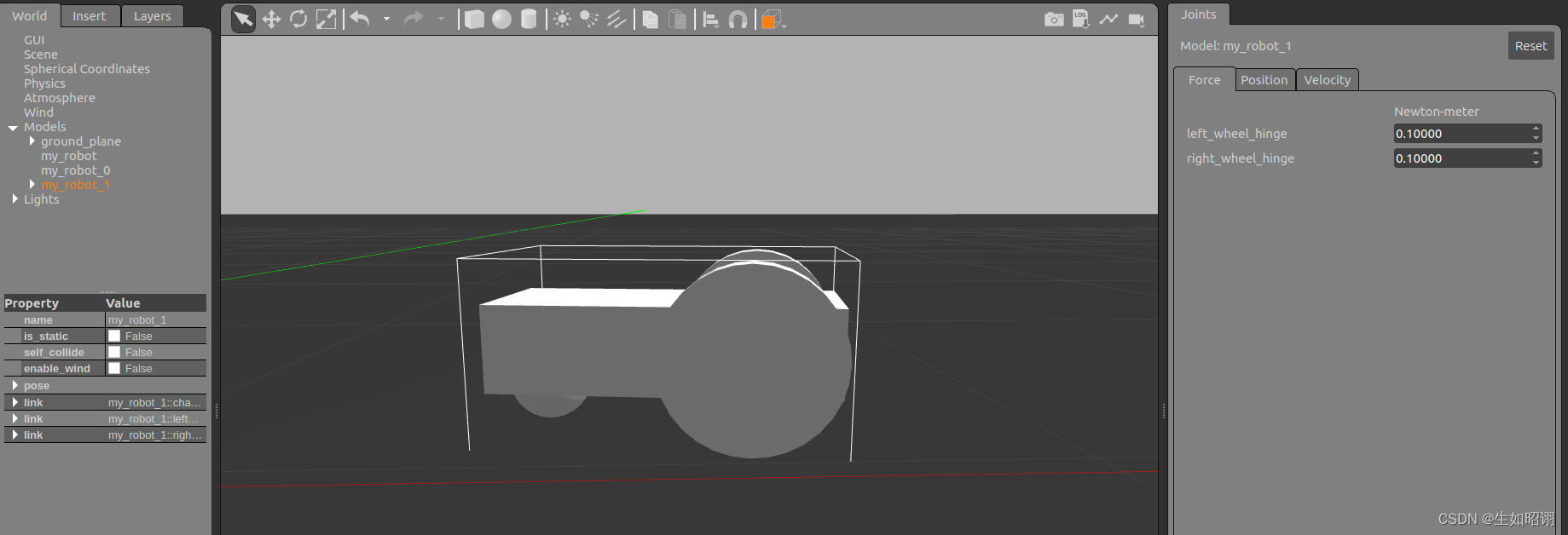
4. Gazebo基本仿真
- 基本操作:启动Gazebo,插入最新模型,打开隐藏的右面板,选择好要控制的模型,如下图给Force下的各关节力进行修改,机器人就会发生移动:
二、创建Velodyne HDL-32 LiDAR传感器
- 内容简介:本节内容以一个两轮移动机器人为例,使用差动驱动机构运动,从无到有,使用SDF完成建模并在Gazebo中完成仿真,重点在于通过建模的细致流程掌握如何使用SDF文件和Gazebo软件完成机器人仿真。
1. 创建基本世界
- 创建新的
.world文件:
gedit velodyne.world- 1
- 创建世界的环境:地面与光线
<sdf version="1.5"> <world name="default"> <include> <uri>model://sunuri> include> <include> <uri>model://ground_planeuri> include> world> sdf>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
2. 创建传感器静态模型
- 传感器基础部分2D绘图如下:

- 对应代码如下:位于< world >的内部
<model name="velodyne_hdl-32"> <link name="base"> <pose>0 0 0.029335 0 0 0pose> <collision name="base_collision"> <geometry> <cylinder> <radius>.04267radius> <length>.05867length> cylinder> geometry> collision> <visual name="base_visual"> <geometry> <cylinder> <radius>.04267radius> <length>.05867length> cylinder> geometry> visual> link> <link name="top"> <pose>0 0 0.095455 0 0 0pose> <collision name="top_collision"> <geometry> <cylinder> <radius>0.04267radius> <length>0.07357length> cylinder> geometry> collision> <visual name="top_visual"> <geometry> <cylinder> <radius>0.04267radius> <length>0.07357length> cylinder> geometry> visual> link> model>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 启动Gazebo查看模型:(先cd到文件路径下)
cd ~/ gazebo velodyne.world -u- 1
- 2

- 查看碰撞属性:右键点击模型,view→Collisions

3. 添加模型惯性
- 3.1 查看当前惯性值:右键单击模型,选择View->Inertia

注意:紫色框对应关联的链接大小,此时模型没有惯性信息,故尺寸过大
- 3.2 添加惯性信息:质量设为1.3kg,添加对应质量和惯性矩阵
在< link name=“base” >块中添加以下内容:
<link name="base"> <pose>0 0 0.029335 0 0 0pose> <inertial> <mass>1.2mass> <inertia> <ixx>0.001087473ixx> <iyy>0.001087473iyy> <izz>0.001092437izz> <ixy>0ixy> <ixz>0ixz> <iyz>0iyz> inertia> inertial>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
在< link name=“top” >块中添加以下内容:
<link name="top"> <pose>0 0 0.095455 0 0 0pose> <inertial> <mass>0.1mass> <inertia> <ixx>0.000090623ixx> <iyy>0.000090623iyy> <izz>0.000091036izz> <ixy>0ixy> <ixz>0ixz> <iyz>0iyz> inertia> inertial>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
最终效果如下:

4. 添加关节
- 4.1 定义顶部围绕底部旋转关节,在< world >最后添加内容如下:
<joint type="revolute" name="joint"> <pose>0 0 -0.036785 0 0 0pose> <parent>baseparent> <child>topchild> <axis> <xyz>0 0 1xyz> <limit> <lower>-10000000000000000lower> <upper>10000000000000000upper> limit> axis> joint>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 4.2 检验效果:
1. 启动Gazebo,右键单击模型,选择View->Joints,View->Transparent

2. 打开右面板,选择Velodyne模型。使用Force选项卡向关节施加较小的,可看到关节旋转即可

5. 添加传感器
- 传感器基本信息:
激光传感器,可以发出一个或多个光束,光束产生距离和强度数据,对应SDF文件中的< scan >和< range >,分别对应波束的布局、数量和限定束的性质,其中< scan >中包含< horizontal >和< vertical >两个块。< horizontal >组件定义在水平平面中发出的光线,该< vertical >组件定义在垂直平面中发出的光线,Velodyne传感器需要垂直射线,然后旋转。我们将其模拟为旋转的水平扇面。
- 添加并设置传感器:(在的最后部分添加以下内容)
<sensor type="ray" name="sensor"> <pose>0 0 -0.004645 1.5707 0 0pose> <visualize>truevisualize> <update_rate>30update_rate> <ray> <scan> <horizontal> <samples>32samples> <resolution>1resolution> <min_angle>-0.53529248min_angle> <max_angle>0.18622663max_angle> horizontal> scan> <range> <min>0.05min> <max>70max> <resolution>0.02resolution> range> ray> sensor>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 查看仿真效果:

- 添加高斯噪声:
在< sensor >的子标签< ray >中添加如下代码:
<noise> <type>gaussiantype> <mean>0.0mean> <stddev>0.1stddev> noise>- 1
- 2
- 3
- 4
- 5
- 6
效果如下:

- 通过Ctrl+T打开topic visualization查看:

总结
- 内容分析:本篇博客主要介绍了在Gazebo中如何使用SDF进行手动的编程建模,通过编写SDF文件,实现对于机器人从无到有的一步步建造,体会SDF文件的语法使用,并在文章整体使用两个具体实例,分别是轮式小车和Velodyne HDL-32 LiDAR传感器模型进行了深入研究。

- 注意:本文参考了Gazebo官方网站以及古月居中的Gazebo有关教程,主要目的是方便自行查询知识,巩固学习经验,无任何商业用途。
-
相关阅读:
uni-app:自带的消息提示被遮挡的解决办法(自定义消息提示框)
小白学流程引擎-FLowable(二) — 从零搭建自己的FLowable服务 — 搭建流程服务-FLowable的新手指南
商品推荐_后端的一些操作
[RTOS 学习记录] 工程管理工具make及makefile
空间变换矩阵的三种理解方式
【2023联发科提前批笔试题】~ 题目及参考答案
浅谈UTON WALLET数字钱包及其安全性
使用CNI网络插件(calico)实现docker容器跨主机互联
【Unity3D】GUI控件
【毕业设计】基于javaEE+SSH+mysql的码头船只出行及配套货柜码放管理系统设计与实现(毕业论文+程序源码)——码头船只出行及配套货柜码放管理系统
- 原文地址:https://blog.csdn.net/lc1852109/article/details/126157030