-
基于模型设计(MBD)工程方法开发六轴机械臂系统实战
本课程采用基于模型设计(MBD)的工程开发方法,实现对六轴机械臂系统的开发,包括六轴机械臂的知识和控制器的软硬件实现,有助于设计串联、并联的机械臂、康复医疗机器人等其它机电设备的电控系统。目前,这种世界先进的开发方法,国际上一流企业都在用,如Airbus、Boston Dynamics、特斯拉、三星、马自达、宝马、奔驰等。掌握了这种方法,就掌握了国际先进技术,让你轻松成为**“高薪”**一族。


课程大纲
第1章六轴机械臂和基于MBD的控制系统开发方法
课程介绍及安排
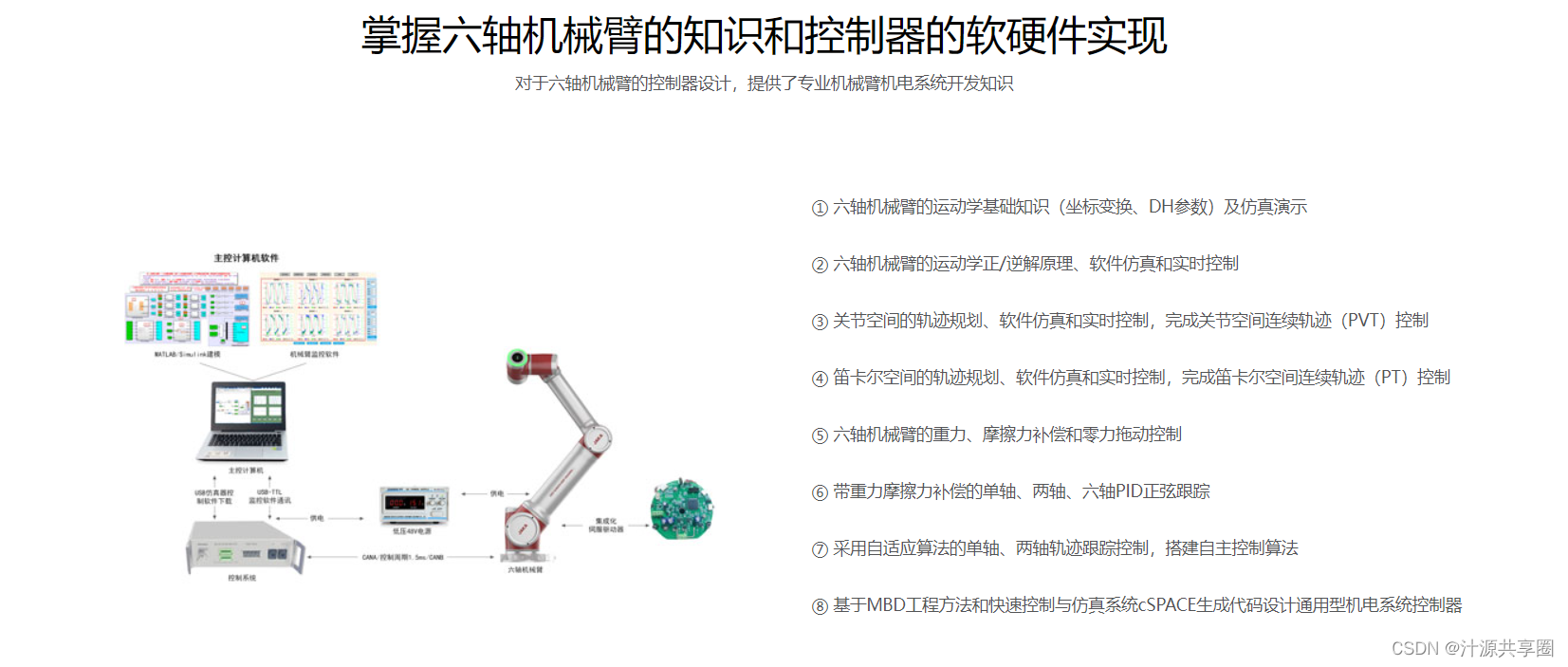
六轴机械臂系统介绍(发展现状,运动学、标定、动力学控制、参数辨识、柔顺控制等)
基于模型设计MBD及其应用
采用MBD和cSPACE生成代码的机械臂控制开发流程
第2章六轴机械臂及其控制系统
六轴臂本体、关节、伺服驱动和总线通讯
六轴机械臂的控制器介绍
基于Simulink和TI DSP的MBD电控系统设计
课后作业讲解
第3章运动学原理与仿真
运动学基本知识,包括坐标变换、DH参数
六轴协作机械臂的运动学正解原理与仿真
六轴协作机械臂的运动学逆解原理与仿真
机械臂正逆解代码介绍
课后作业讲解
第4章机械臂Simscape建模、仿真和实时控制
机械臂Simscape物理建模
机械臂Simscape正逆解仿真
机械臂正逆解HIL仿真控制
实践1:Solidworks导出成Simscape模型
实践2:机械臂正逆解HIL仿真控制实操
实践3:机械臂正逆解实时控制
第一章到第四章直播答疑
第5章关节空间的轨迹规划算法设计和实时控制
关节空间的轨迹规划原理与仿真
实践1:关节空间轨迹规划算法设计仿真和实时控制实践
关节空间的轨迹规划实时控制
第6章笛卡尔空间的轨迹规划算法设计和实时控制
笛卡尔空间的轨迹规划原理与仿真
实践1:六轴机械臂笛卡尔空间直线插补、圆插补轨迹规划仿真
笛卡尔空间的轨迹规划实时控制
第7章机械臂的动力学控制
六轴机械臂零力拖动控制
实践1:五轴机械臂关节零力拖动控制实验
六轴PID正弦轨迹跟踪控制
实践2:PID算法正弦轨迹跟踪控制仿真实验
采用自适应算法的单轴、两轴轨迹跟踪控制
实践3:自适应算法控制实验(单轴、两轴)
六轴机械臂的动力学参数辨识和软硬件实现
第8章基于MBD和cSPACE生成代码设计通用机电系统的控制器
直线电机倒立摆的建模、LQR算法设计和实时控制
多电机伺服驱动控制器的设计(上)
多电机伺服驱动控制器的设计(下)
对本科教学、科研的支持及总结
第9章基于MATLAB/Simulink+ROS联合开发机器人
ROS目前的基本情况
如何基于ROS开发机械臂(上)
如何基于ROS开发机械臂(下)
MATLAB结合ROS开发机械臂
开发案例
第一章到第九章直播答疑
期末直播答疑
获取方式:
链接: 点我 -
相关阅读:
groovy笔记
Python实现猎人猎物优化算法(HPO)优化Catboost分类模型(CatBoostClassifier算法)项目实战
没错,又是一位月薪过万的测试小伙伴!
java多线程基础——阻塞式队列
详解java重定向和转发的区别
Java基础-static关键字
递归 python
宏观经济学名词解释
【手撕DroneSSOD】(一)Density Crop Labeling 部分
HDLBits-Rule110
- 原文地址:https://blog.csdn.net/tzlaa/article/details/126213408
{kind=link}