-
01标定相关理论
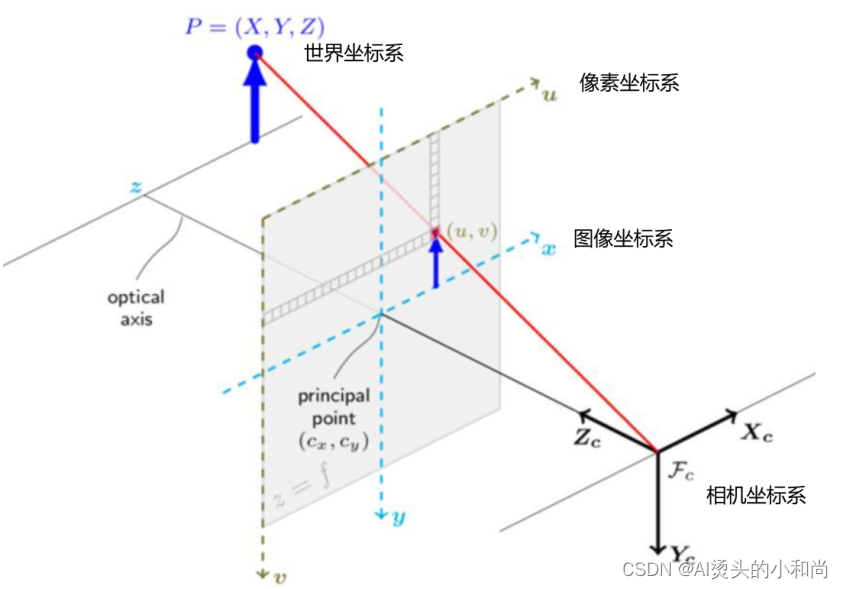
一、相关坐标系
- 世界坐标系:客观三维世界的绝对坐标系,用这个基准坐标系来描述相机的位置,并且用它来描述安放在此三维环境中的其它任何物体的位置,用(X, Y, Z)表示其坐标值。
- 相机坐标系:以相机光心为坐标原点,X 轴和Y 轴分别平行于图像坐标系的 X 轴和Y 轴,相机的光轴为Z 轴,用(Xc, Yc, Zc)表示其坐标值。
- 图像坐标系:以图像中心为坐标原点,X轴和Y 轴分别平行于图像平面的两条垂直边,用( x , y )表示其坐标值。图像坐标系是用物理单位(例如毫米)表示像素在图像中的位置。
- 像素坐标系:以图像左上角顶点为坐标原点,X 轴和Y 轴分别平行于图像坐标系 X 轴和Y 轴,用(u , v )表示其坐标值。
二、标定
摄像机标定(Camera calibration):从世界坐标系转换为相机坐标系,再由相机坐标系转换为图像坐标系的过程,也就是求解投影矩阵P的过程。- 1
0、目的
狭义:求解相机的内参和外参以及畸变参数
广义:畸变矫正和一维和二维测量
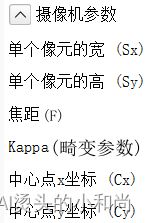
1、内参
概念:相机的固有属性
相机的内参数:Sx、Sy、F、K、Cx、Cy
2、外参
概念:摄像机(世界坐标系)与测量平面(相机坐标系)之间的位置关系
相机的外参数是6个:三个轴的旋转参数(ω、δ、 θ),三个轴的平移参数(Tx、Ty、Tz)

3、畸变矫正
步骤:- 通过标定求出相机内参。
- 通过有畸变的内参求出无畸变的内参。
- 求出有畸变的内参和无畸变的内参之间的映射关系。
- 将映射关系作用到产生畸变的物体当中,完成畸变校正。
-
相关阅读:
算法通过村第十七关-贪心|青铜笔记|贪心也很简单呕
数据科学面试你应该知道的10个统计概念
JavaWeb——关于servlet种mapping地址映射的一些问题
Linux基本命令简单介绍
【源码】hamcrest 源码阅读 空对象模式、模板方法模式的应用
杂多酸离子液体[BMIM]3 PW12O40负载三乙烯四胺(TETA)功能化Fe3O4复合材料([BMIM]3 PW12O40/Fe3O4@TETA)
低代码开发的兴衰
遥测终端机RTU助力城市内涝监测系统
git 删除分支
jenkins
- 原文地址:https://blog.csdn.net/wangzijunn/article/details/126182230