-
UDS诊断系列介绍02-传输层CANTP
1. 模块介绍
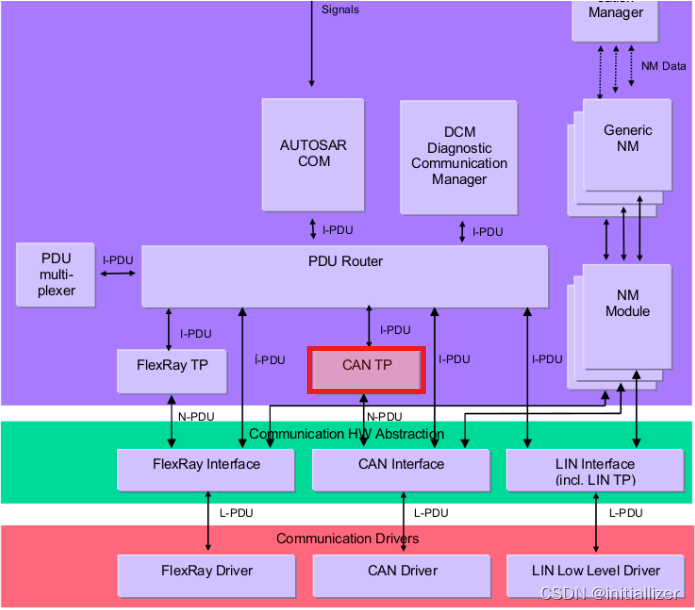
CANTP(CAN TransportLayer),位于通信栈的传输层,是专门服务于UDS诊断,位于PDUR与CANIF之间,实现了PDUR到CANIF的拆包发送与CANIF到PDUR的组包接收功能。对于多帧大数据支持通过流控帧控制数据发送速率并提供数据发送与接收过程中超时处理功能。
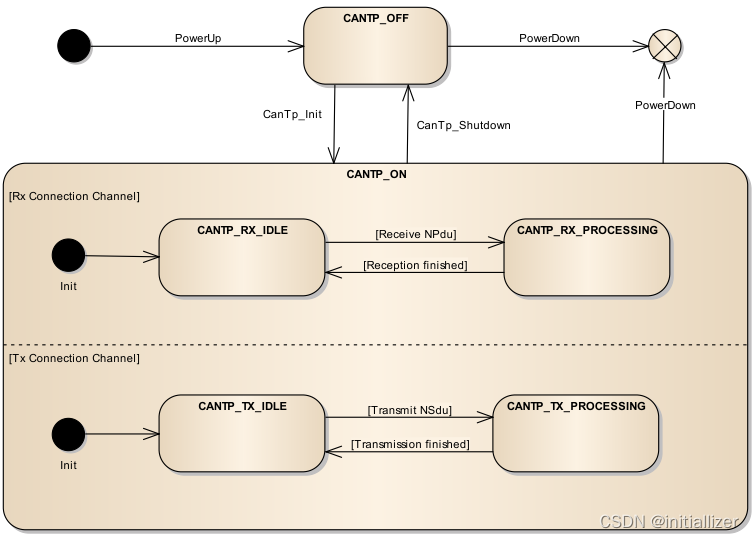
1.1 CANTP状态机
CANTP内部有两个状态机,分别为CANTP_OFF及CANTP_ON,在ECU刚上电后其状态为CANTP_OFF,经过CanTp_Init()后状态切为CANTP_ON,发送与接收才可以正常进行。
1.2 涉及概念
单帧:SF(Single Frame),用于发送单个CAN帧即可发送完成的数据;
首帧:FF(First Frame),用于发送较大数据情况下的第一帧;
连续帧:CF(Consecutive Frame),用于发送较大数据情况下首帧外的其余部分;
流控帧:FC(Flow Control),接收后用于调节数据发送速度。I-PDU:Interaction Layer PDU,I-PDU包括数据,数据长度及I-PDU ID;
N-PDU:Network Layer PDU,网络层PDU;
L-PDU:Data Link Layer PDU,一个或多个I-PDU组包成一个L-PDU.
SDU:Service Data Unit2. 功能描述
下面对CANTP的接收与发送功能进行介绍,根据数据大小,将进一步拆分为单帧与多帧的发送与接收。
2.1 PDU的发送
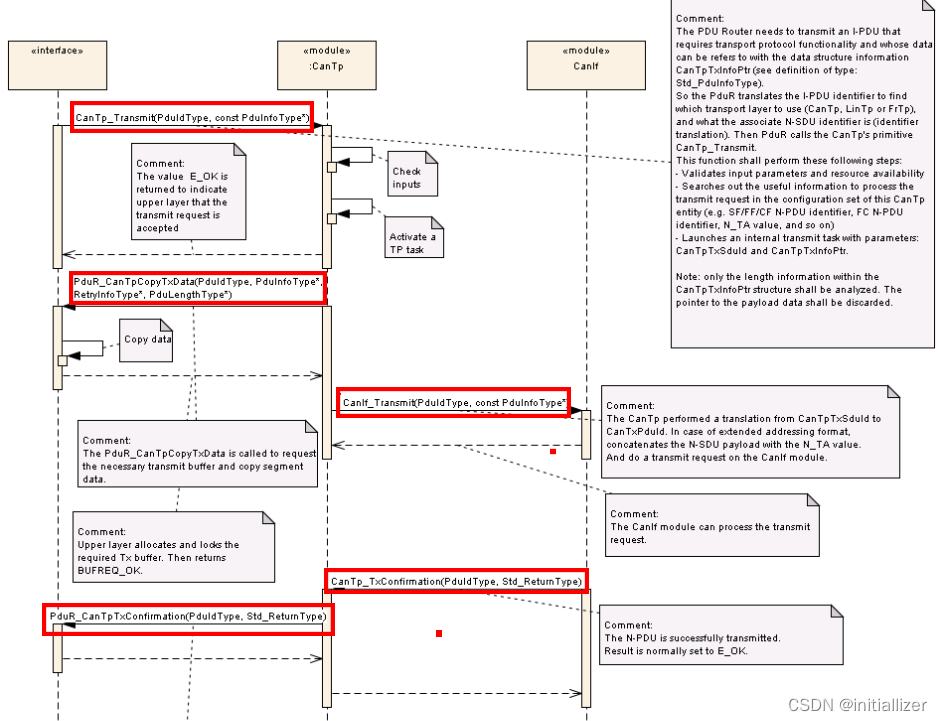
2.1.1 单帧PDU发送
其发送步骤为:
1)PduR调用CanTp接口,请求进行单帧数据传输;
2)CanTp调用PduR接口Copy数据,并调用CanIf接口发送数据

对应时序图:
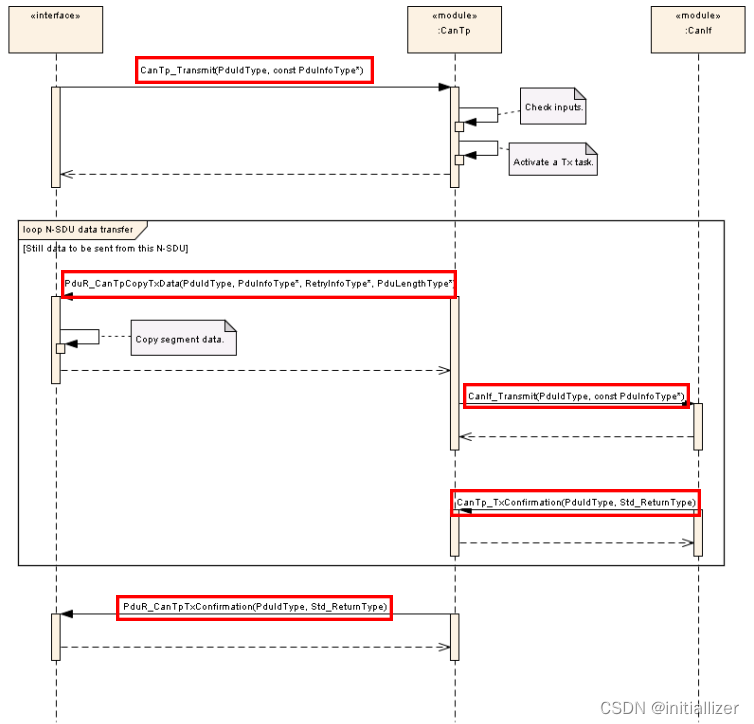
2.1.2 多帧PDU发送
其发送步骤为:
1)PduR调用CanTp接口,请求进行多帧数据传输;
2)CanTp调用PduR接口Copy数据,并调用CanIf接口发送首帧数据
3)CanTp再次调用PduR接口Copy数据,并调用CanIf接口发送连续帧数据,直到全部数据发送结束。
对应时序图:
2.2 PDU的接收
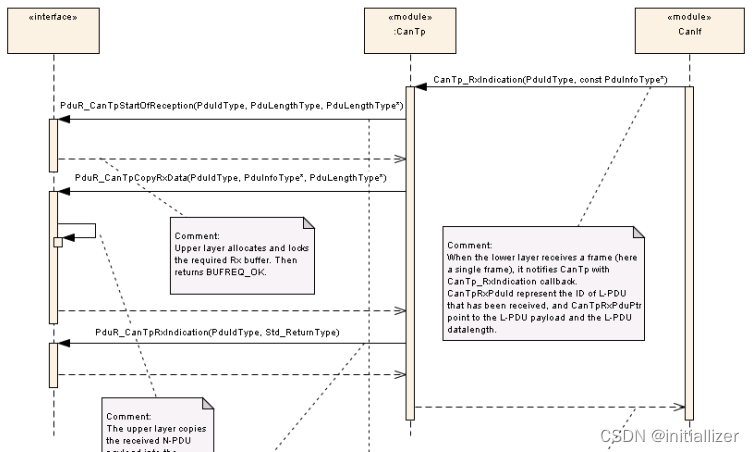
2.2.1 单帧PDU接收
其发送步骤为:
1)CanIf调用CanTp接口(CanTp_RxIndication)通知数据接收;
2)CanTp调用PduR接口(PduR_CanTpStartOfReception)通知数据开始接收;
3)CanTp将PDU数据从CanIfCopy到CanTp;
4)CanTp将PDU数据去除包头后从CanTp Copy到PduR;

对应时序图:
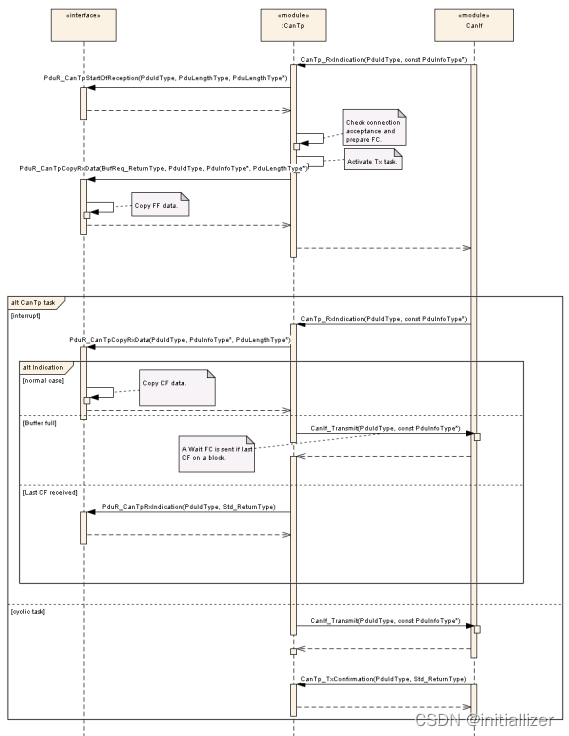
2.2.2 多帧PDU接收
其发送步骤为:
1)CanIf调用CanTp接口(CanTp_RxIndication)通知数据接收;
2)CanTp调用PduR接口(PduR_CanTpStartOfReception)通知数据开始接收;
3)CanTp将首帧PDU数据从CanIfCopy到CanTp;
4)CanTp将首帧PDU数据去除包头后从CanTp Copy到PduR;
5)CanTp将连续帧PDU数据从CanIfCopy到CanTp;
6)CanTp将连续帧PDU数据去除包头后从CanTp Copy到PduR;
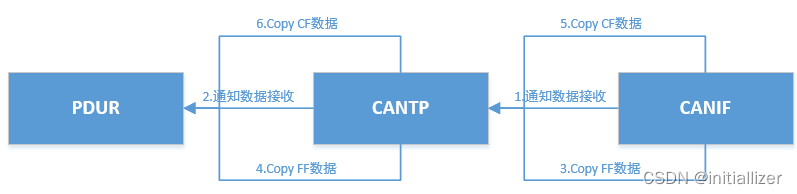
对应时序图:
-
相关阅读:
[使用MogDB Operator在Kubernetes上部署MogDB集群(MogDB Stack)]
题目地址(04.06. 后继者)
day02vue学习
贪吃蛇游戏制作
FreeRTOS遍历所有任务的TCB并获得栈的最大使用量
Hbase工作原理
第二章:Java的变量
四平方和,激光炸弹
2022年9月起ios真机无法运行标准基座
什么是伪共享?Java8如何使用@sun.misc.Contended避免伪共享?
- 原文地址:https://blog.csdn.net/initiallizer/article/details/126083017