-
使用stm32cubemx实现GD32 DAC信号输出和ADC信号采集
stm32 cubemx用stm32f103VCT6芯片,生成的代码。可以直接烧录到GD32f303、307上面。
用GD32提供的库函数写的话,307的程序303用不了。
管脚对应
画的pcb板子,引脚PA4对应DAC,PC1对应ADC。
cubemx里面,也要这么对应。


RCC和SYS配置

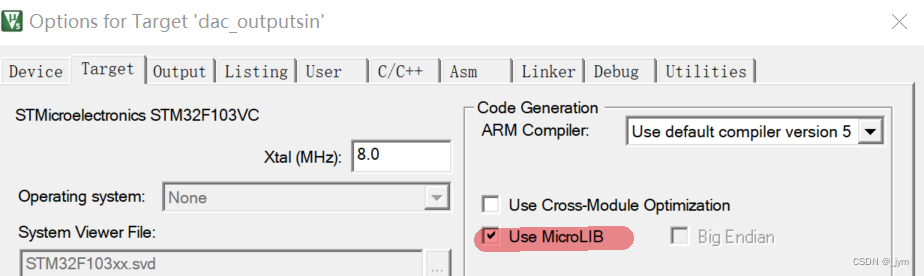
sys里面debug选项默认是no debug,一定要记得改。

ADC+TIM+DMA配置
这里采用选择TIM3的TRGO信号触发。

DMA设置normal,采完指定数就停。

TIM3配置。

DAC+TIM+DMA配置



USART、时钟树和其他配置




代码
生成代码之后,修改或添加如下代码。
main.c
/* USER CODE BEGIN Includes */ #include "stdio.h" #include "math.h" #include "stdlib.h" #define POINTS 120 /* USER CODE END Includes */ /* USER CODE BEGIN PV */ uint16_t SineWaveTable[POINTS+1]; uint16_t adc_buff[120]; __IO uint8_t AdcConvEnd = 0; /* USER CODE END PV */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ void SineWaveGen(uint32_t NPoints, float VMaxRange, uint16_t* SineWaveTable) { #ifndef PI #define PI 3.1415926 #endif int i = 0; double radian = 0; // 弧度 double setup = 0; // 弧度和弧度之间的大小 double voltage = 0; // 输出电压 setup = (2 * PI) / NPoints; // 两点之间的间距 while (i < NPoints) { voltage = VMaxRange / 2.0 * (sin(radian) + 1.0); // 计算电压 printf("%lf\r\n",voltage);//可以删 SineWaveTable[i] = (uint16_t)(voltage * 4096 / 3); //3还是3.3根据电路图来看 radian += setup; // 下一个点的弧度 i++; } } /* USER CODE END 0 */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_DMA_Init(); MX_DAC_Init(); MX_TIM6_Init(); MX_USART1_UART_Init(); MX_ADC1_Init(); MX_TIM3_Init(); /* USER CODE BEGIN 2 */ SineWaveGen(POINTS, 1, SineWaveTable); HAL_TIM_Base_Start(&htim6); HAL_DAC_Start_DMA(&hdac, DAC_CHANNEL_1, (uint32_t *)SineWaveTable, POINTS, DAC_ALIGN_12B_R); HAL_TIM_Base_Start(&htim3); //开启定时器3 HAL_ADCEx_Calibration_Start(&hadc1); //AD校准,F4不用校准没用这行函数。 HAL_ADC_Start_DMA(&hadc1, (uint32_t *)adc_buff, 120); //让ADC1去采集120个数,存放到adc_buff数组里 while (!AdcConvEnd) //等待转换完毕 ; for (uint16_t i = 0; i < 120; i++) { printf("%.3f\n", adc_buff[i] * 3.0 / 4095); //数据打印,查看结果 } /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
usart.c
/* USER CODE BEGIN 0 */ #include "stdio.h" /* USER CODE END 0 */ /* USER CODE BEGIN 1 */ int fputc(int ch, FILE *f) { HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff); return ch; } /* USER CODE END 1 */- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
stm32f1xx_it.c
/* USER CODE BEGIN PV */ extern uint8_t AdcConvEnd;//引入外部变量 /* USER CODE END PV */ void DMA1_Channel1_IRQHandler(void) { /* USER CODE BEGIN DMA1_Channel1_IRQn 0 */ /* USER CODE END DMA1_Channel1_IRQn 0 */ HAL_DMA_IRQHandler(&hdma_adc1); /* USER CODE BEGIN DMA1_Channel1_IRQn 1 */ AdcConvEnd=1; /* USER CODE END DMA1_Channel1_IRQn 1 */ }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
结果
将串口输出整理后。
左侧是DAC输出,右侧是经过一些电路后ADC读取的电压。

-
相关阅读:
精品基于Uniapp+SSM实现的日常饮食管理APP
【立创机械狗从0到成品PCB画图总结】
成都瀚网科技:抖店怎么快速出体验分?
什么是温度传感器?温度传感器原理是什么?一文带你全部搞懂
AWNet: Attentive Wavelet Network for Image ISP AWNet:图像 ISP 的注意力小波网络(个人笔记,勿喷)
数据库问题汇总
css3-浮动和display、父级边框塌陷
基于Ubuntu20.04安装GoogleTest及其运行Sample
【Unity】Unity开发进阶(七)双刃剑:扩展方法
ESP8266-Arduino编程实例-开发环境搭建(基于PlatformIO)
- 原文地址:https://blog.csdn.net/qq_40828914/article/details/125633617