-
ROS学习_基础
ROS命令行工具使用
一、常用命令
- roscore :启动ros
- rosrun :
rosrun [package_name] [node_name]调用节点 参数为功能包名和节点名称 - rosnode :
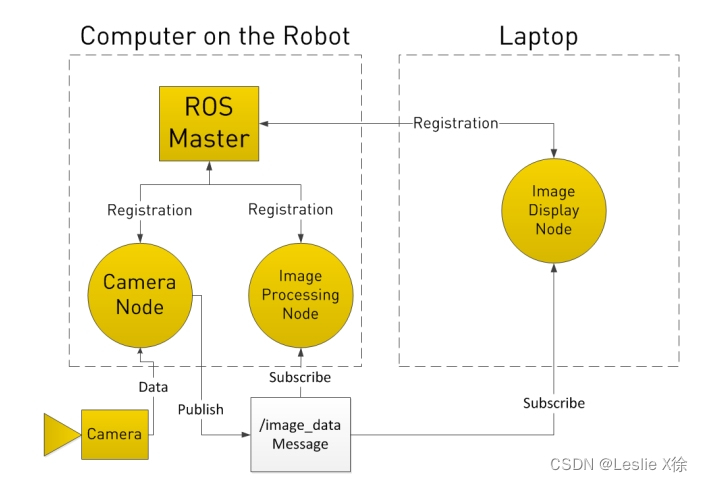
rosnode list列出当前运行的节点 - rqt_graph :可视化当前运行的节点
- rostopic :进行话题的操作
rostopic pub:发布话题消息rostopic type:查看消息类型
- rosservice :进行服务的操作
rosservice call:发布服务请求
- rosparam
- rosmsg :获取消息的详细信息
- rossrv
二、示例:海龟仿真
-
启动ROS Master:
$roscore -
启动海龟仿真器:
$rosrun turtlesim turtlesim_node -
启动海龟控制节点:
$rosrun turtlesim turtle_teleop_key
注意:这三个命令分别在三个终端执行。 -
运行

三、发布话题消息
发布消息 让海龟一直移动。
- 先查看消息类型
~$ rostopic type /turtle1/cmd_vel geometry_msgs/Twist ~$ rosmsg show geometry_msgs/Twist geometry_msgs/Vector3 linear float64 x float64 y float64 z geometry_msgs/Vector3 angular float64 x float64 y float64 z- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 编写参数
~$ rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist " linear: x: 1.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.0 "- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
注意:参数对齐
- 运行

四、发布服务请求
发布服务请求,添加新的海龟。
- 查看请求信息
~$ rosservice info /spawn Node: /turtlesim URI: rosrpc://ros2go:39063 Type: turtlesim/Spawn Args: x y theta name- 1
- 2
- 3
- 4
- 5
- 6
- 发布请求
~$ rosservice call /spawn " x: 5.0 y: 5.0 theta: 0.0 name: 'turtle2' " name: "turtle2"- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 运行

五、话题和服务的区别
- 话题 (Topic)
- 节点间的异步通信机制
- 使用 发布/订阅 模型
- 话题数据:消息(Message) 文件格式
.msg
- 服务 (Service)
- 节点间的同步通信机制
- 使用 客户端/服务器(C/S) 模型
- 数据:文件格式
.srv

-
相关阅读:
学生HTML个人网页作业作品 基于HTML+CSS+JavaScript明星个人主页(15页)
Postman模拟上传文件
【XGBoost】第 5 章:XGBoost 揭幕
【Nuget】程序包源
什么是HTML?
FFmpeg--packet数据包和frame数据帧的区别
Bootstrap禁止点击空白处关闭模态框
vue3-admin商品管理后台项目(后台布局layout布局开发二)
Mac 电脑查看本地maven,及私有仓库的搭建与使用【nexus的配置与使用】
Speedoffice(excel)文档中min函数如何使用
- 原文地址:https://blog.csdn.net/weixin_44342705/article/details/125569579