-
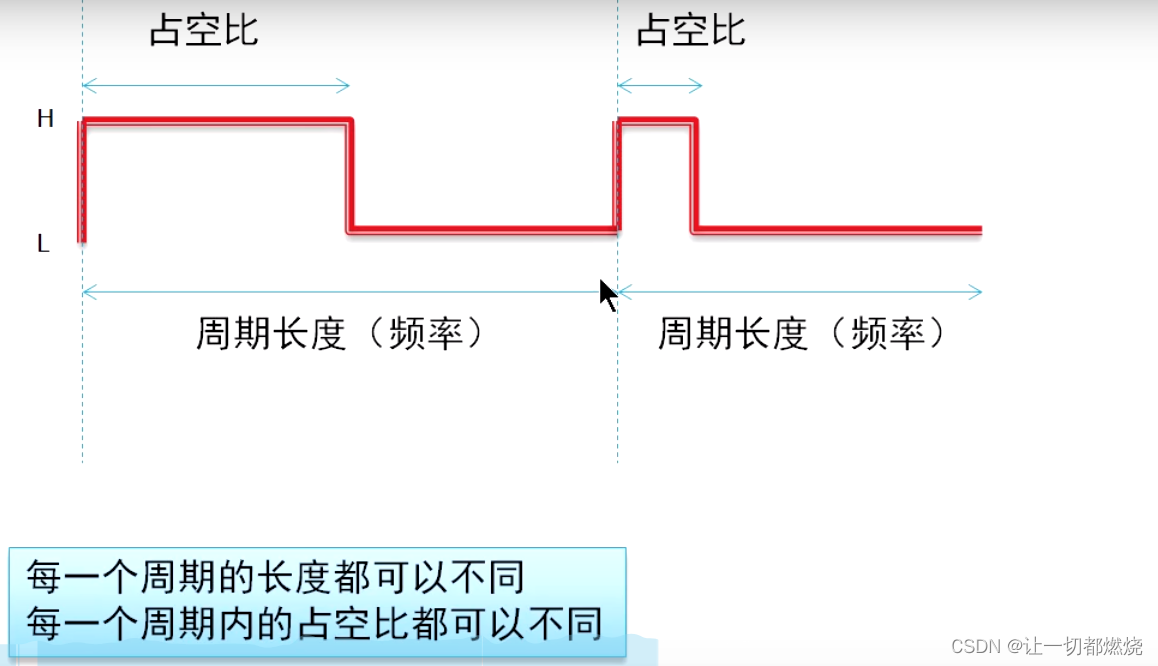
串口控制舵机转动
任务要求
- 使用串口通信,电脑串口助手发送给单片机十六进制数据,对应舵机转角0~最大角度
- 发送数据范围0~180
思路
使用查询模式:使用的是disable串口中断
'0’指是是ASCII字符0,不是十六进制1/9 1/3000
0 1500
45 3000
a度数 x波
a = (x-0.5)90
x=a/90.0+0.5
t = x3000
1/3000
1/90 1500 0.5
18 2100 0.7
27 2400 0.8
30.06 2502 0.834 1002
36 2700 0.9
45 3000 1 4.5=(1-0.5)*9
63 3600 1.2 6.3=(1.2-0.5)*9 倒着算
72 3900 1.3
81 4200 1.4
90 4500 1.5 9.0=(1.5-0.5)*9
108 5100 1.7
126 5700 1.9
135 6000 2
162 6900 2.3
180 7500 2.5利用数据计算出公式,就可以实现无论输入任何角度,舵机都能转出对应的角度
需要usart.h和usart.c串口通信
完成代码:
main.c
int main (void){//主程序 vu16 t; delay_ms(500); //上电时等待其他器件就绪 RCC_Configuration(); //系统时钟初始化 RELAY_Init();//继电器初始化 USART1_Init(115200); I2C_Configuration();//I2C初始化 TIM3_PWM_Init(59999,23); //设置频率为50Hz,公式为:溢出时间Tout(单位秒)=(arr+1)(psc+1)/Tclk 20MS = (59999+1)*(23+1)/72000000 //Tclk为通用定时器的时钟,如果APB1没有分频,则就为系统时钟,72MHZ //PWM时钟频率=72000000/(59999+1)*(23+1) = 50HZ (20ms),设置自动装载值60000,预分频系数24 while(1){ //查询方式接收 if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE) != RESET){ //查询串口待处理标志位 a =USART_ReceiveData(USART1);//读取接收到的数据 //将角度转换为占空比 t=(a/90.0+0.5)*3000.0; TIM_SetCompare3(TIM3,t); printf("%d ",a); } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
追加任务
while(1)里不能写东西
思路
使用定时器中断

需要tim.c和tim.h采用定时器中断while(1)中就不需要写入程序
完成代码
main.c
int main (void){//主程序 vu16 a; vu16 t; delay_ms(500); //上电时等待其他器件就绪 RCC_Configuration(); //系统时钟初始化 RELAY_Init();//继电器初始化 USART1_Init(115200); I2C_Configuration();//I2C初始化 OLED0561_Init(); //OLED初始化 OLED_DISPLAY_8x16_BUFFER(0," YoungTalk "); //显示字符串 OLED_DISPLAY_8x16_BUFFER(3," SG90 TEST2 "); //显示字符串 TOUCH_KEY_Init();//按键初始化 TIM3_PWM_Init(59999,23); //设置频率为50Hz,公式为:溢出时间Tout(单位秒)=(arr+1)(psc+1)/Tclk 20MS = (59999+1)*(23+1)/72000000 //Tclk为通用定时器的时钟,如果APB1没有分频,则就为系统时钟,72MHZ //PWM时钟频率=72000000/(59999+1)*(23+1) = 50HZ (20ms),设置自动装载值60000,预分频系数24 TIM3_Init(59999,23);//定时器初始化,定时1秒(9999,7199) while(1){ } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
tim.c
void TIM3_IRQHandler(void)TIM3中断处理函数
在这个函数体内写入串口控制舵机的程序即可#include "tim.h" //定时器时间计算公式Tout = ((重装载值+1)*(预分频系数+1))/时钟频率; //例如:1秒定时,重装载值=9999,预分频系数=7199 void TIM3_Init(u16 arr,u16 psc){ //TIM3 初始化 arr重装载值 psc预分频系数 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStrue; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//使能TIM3 TIM3_NVIC_Init (); //开启TIM3中断向量 TIM_TimeBaseInitStrue.TIM_Period=arr; //设置自动重装载值 TIM_TimeBaseInitStrue.TIM_Prescaler=psc; //预分频系数 TIM_TimeBaseInitStrue.TIM_CounterMode=TIM_CounterMode_Up; //计数器向上溢出 TIM_TimeBaseInitStrue.TIM_ClockDivision=TIM_CKD_DIV1; //时钟的分频因子,起到了一点点的延时作用,一般设为TIM_CKD_DIV1 TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStrue); //TIM3初始化设置 TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);//使能TIM3中断 TIM_Cmd(TIM3,ENABLE); //使能TIM3 } void TIM3_NVIC_Init (void){ //开启TIM3中断向量 NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x3; //设置抢占和子优先级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x3; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } void TIM3_IRQHandler(void){ //TIM3中断处理函数 u16 a; u16 t; if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET){ //判断是否是TIM3中断 TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //此处写入用户自己的处理程序 // GPIO_WriteBit(LEDPORT,LED1,(BitAction)(1-GPIO_ReadOutputDataBit(LEDPORT,LED1))); //取反LED1 //查询方式接收 if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE) != RESET){ //查询串口待处理标志位 a =USART_ReceiveData(USART1);//读取接收到的数据 //将角度转换为占空比 // i=a/90.0; // x= a/90.0+0.5; t=(a/90.0+0.5)*3000.0; TIM_SetCompare3(TIM3,t); printf("%d ",a); } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
-
相关阅读:
【计算机系统结构期末复习】第六章
springboot actuator:开放全部(部分)端点、端点映射、端点保护
使用SpringBoot里Endpoint中遇到的一个小坑
黑豹程序员-CSS四种样式的定义方式及冲突后的就近原则
元素转换(四种)
R3LIVE代码详解(四)
FPGA高端项目:FPGA基于GS2971的SDI视频接收+图像缩放,提供3套工程源码和技术支持
Selenium4+python被单独定义<div>的动态输入框和二级下拉框要怎么定位?
[java刷算法]牛客—剑指offer树的子结构,对称树,树的镜像
免费api接口分享,开发效率快速提升
- 原文地址:https://blog.csdn.net/Ll_R_lL/article/details/125559811
