-
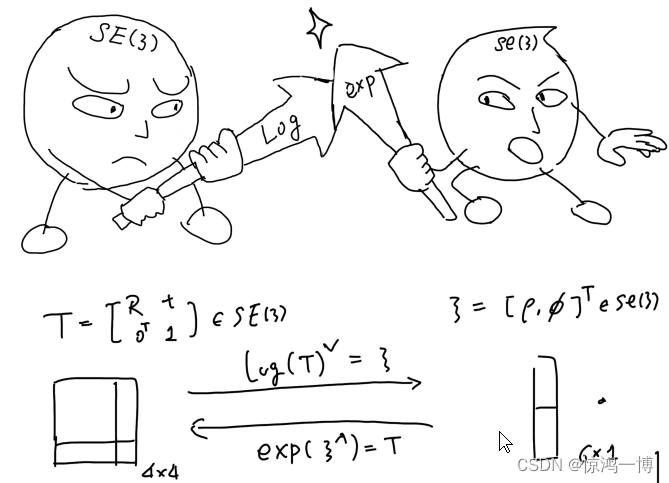
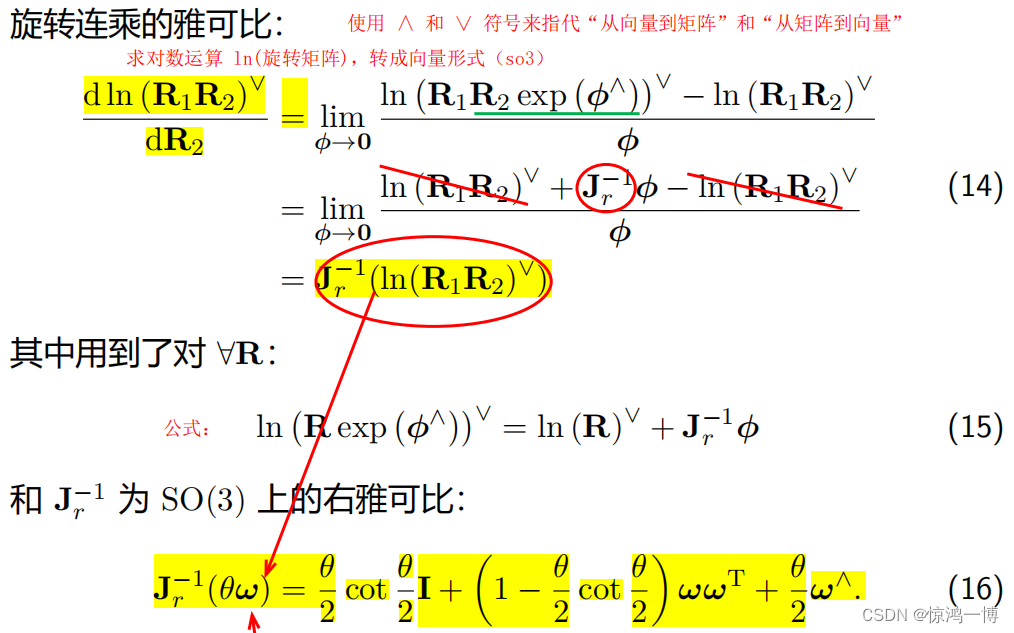
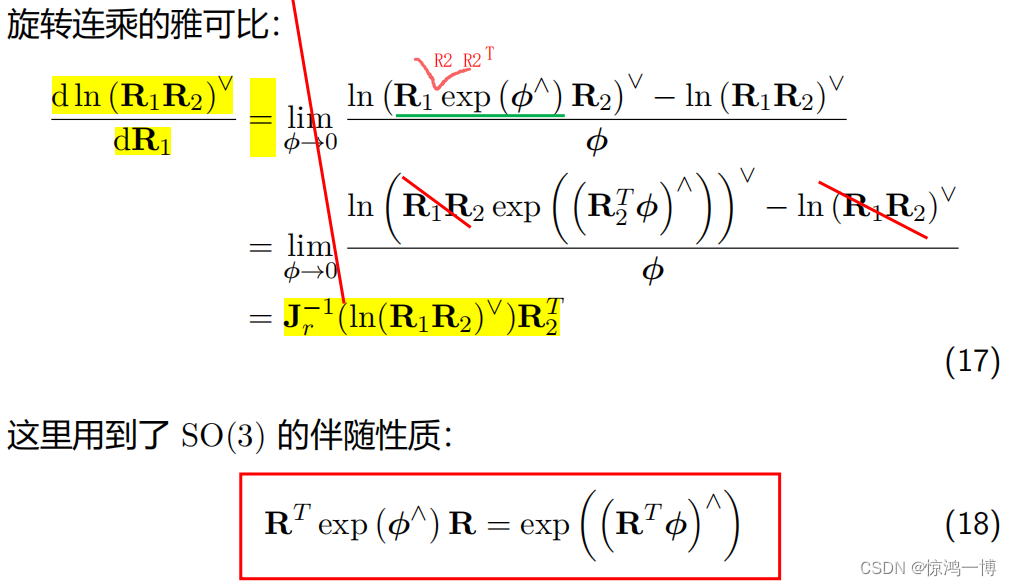
SLAM中常用的雅克比矩阵J
-
相关阅读:
栈和队列的概念及实现
数据结构:二叉树的链式结构
准备HarmonyOS开发环境
中秋,在公司赏月
NGINX重写功能和防盗链
【C++】特殊类的设计
记录上百页html生成pdf的历程和坑(已用bookjs-easy解决)(生成、拼接pdf、接收服务端pdf)
2022最新版-李宏毅机器学习深度学习课程-P26RNN-2
[影视] 当代武侠影视的特效迷途
IP地址、子网掩码、默认网关介绍及例题计算
- 原文地址:https://blog.csdn.net/shyjhyp11/article/details/125464912