-
串口实验——简单数据收发
🐱作者:一只大喵咪1201
🐱专栏:《STM32学习》
🔥格言:你只管努力,剩下的交给时间!

😾描述
串口作为 MCU 的重要外部接口,同时也是软件开发重要的调试手段,其重要性不言而喻。现在基本上所有的 MCU 都会带有串口,STM32 自然也不例外。
STM32 的串口资源相当丰富的,功能也相当强劲。本喵使用的STM32F103ZET6 最多可提供 5 路串口,有分数波特率发生器、支持同步单线通信和半双工单线通讯、支持 LIN、支持调制解调器操作、智能卡协议和 IrDA SIR ENDEC 规范、具有 DMA等。😾接收状态标记
#define USART_REC_LEN 200 //定义最大接收字节数 200 #define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收 extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符 extern u16 USART_RX_STA; //接收状态标记- 1
- 2
- 3
- 4
- 5
在官方提供的库函数usart.h中定义了最大接收字节数,是200个字节,而且创建了一个数组,该数组大小是200个字节,每接收一个字节的数据就放入到这个数组中。
而且使用到了一个变量USART_RX_STA,这是一个体些接收状态的变量,它的大小是16个比特位,也就是俩个字节大小。

这是它每一位代表的意义。- 0到13位存放的是接收到的有效数据个数,每接收到一个有效数据,就会加1。
- 第14位代表是否接受到0X0D数据,也就是回车字符。我们对该串行通信规定,是以回车(0X0D)换行(0X0A)字符结束通信的。如果接受到的数据是0X0D就将该位置为1。
- 第15位代表是否完成接收。如果在接收到的数据是0X0D(回车字符)之后的一个数据是0X0A(换行字符),说明接收完成了,就将该位置为1。
以上规定是我们在通信之前双方之间约定好的,通信双方投按照这个约定来。
😾函数配置
我们这个实验就仅仅实现简单的数据收发。5个串口中,我们选择串口1(UASRT1)实现这个实验。
在本喵的文章串口寄存器函数配置中曾详细的讲到过如何配置串口,在这里本喵便直接去配置,不再讲述原因。- 使能GPIOA和USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟- 1
- 配置GPIOA口
GPIO_InitTypeDef GPIO_InitStructure; //USART1_TX GPIOA.9 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9 //USART1_RX GPIOA.10初始化 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10 USART_Init(USART1, &USART_InitStructure); //初始化串口1- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 配置串口
USART_InitTypeDef USART_InitStructure; //USART 初始化设置 USART_InitStructure.USART_BaudRate = bound;//串口波特率 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 配置中断优先级
NVIC_InitTypeDef NVIC_InitStructure; //Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 开启接收中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断- 1
- 串口使能
USART_Cmd(USART1, ENABLE); //使能串口1- 1
- 编写中断服务函数
void USART1_IRQHandler(void) //串口1中断服务程序 { u8 Res; #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS. OSIntEnter(); #endif if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾) { Res =USART_ReceiveData(USART1); //读取接收到的数据 if((USART_RX_STA&0x8000)==0)//接收未完成 { if(USART_RX_STA&0x4000)//接收到了0x0d { if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始 else USART_RX_STA|=0x8000; //接收完成了 } else //还没收到0X0D { if(Res==0x0d)USART_RX_STA|=0x4000; else { USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ; USART_RX_STA++; if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收 } } } } #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS. OSIntExit(); #endif }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 在进入到中断函数后创建一个1个字节大小的一个变量Res,用于存放接收到的数据。
- 需要判断一下是否发生的是接收中断,如过是接收中断则继续执行中断服务程序,如果是别的中断则不执行中断服务程序。
- 判断一下接收状态标志中的最高位是否为1,如果是1则说明已经完成了数据的接收,就不用再接收了,如果是0则说明没有完成数据接收,需要继续接收。
- 判断第14位是否为1,是1则说明上一个数据是0X0D也就是回车字符,这时就要接着判断下一个数据是否是0X0A也就是换行字符,如果不是换行字符,说明这个数据接收错了,需要重新接收,如果是换行字符就说明数据接收完成了,需要将最高位置1。
- 判断第14位是0的时候,说明数据仍然在不停的接收,在接收到一个数据时就要判断一下是否是0X0D也就是回车字符,并且设置相应的标志位。
- 当上一个数据和这一个数据都不是0X0D的时候,将接收到的数据放在数组中,数组的下标就是0到13位中有效数据的个数。
以上的函数配置过程是不需要我们一行代码一行代码写的,在ST官方提供的库函数usart.c中有这些函数,我们直接使用即可。
- 编写主程序
主程序中的代码是需要我们亲自编写的
#include "delay.h" #include "usart.h" #include "led.h" int main(void) { u8 len = 0;//存放数据个数 u8 t = 0;//循环控制变量 LED_Init();//LED0初始化 delay_init();//延时初始化 uart_init(115200);//串口初始化,波特率为115200 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//优先级分组使用第二组 while(1) { //数据接收完成时发送 if(USART_RX_STA&0x8000) { len = USART_RX_STA&0x3fff;//得到数据长度 printf("\r\n您发送的数据为:\r\n"); //发送所有数据 for(t = 0; t < len; t ++) { USART_SendData(USART1,USART_RX_BUF[t]);//发送一个数据 while(USART_GetFlagStatus(USART1,USART_FLAG_TC) != SET) { ;//一个数据未发送完便一直等待 } } printf("\r\n\r\n"); USART_RX_STA = 0;//数据都发送完后将状态位清0 } //数据接收未完成时等待数据接收 else { printf("\r\n请输入数据,按回车结束:\r\n"); while((USART_RX_STA&0x8000)==0) { LED0 = !LED0; delay_ms(500);//led灯闪烁,等待数据输入 } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
这便是串口实验的所有代码。
😾效果展示
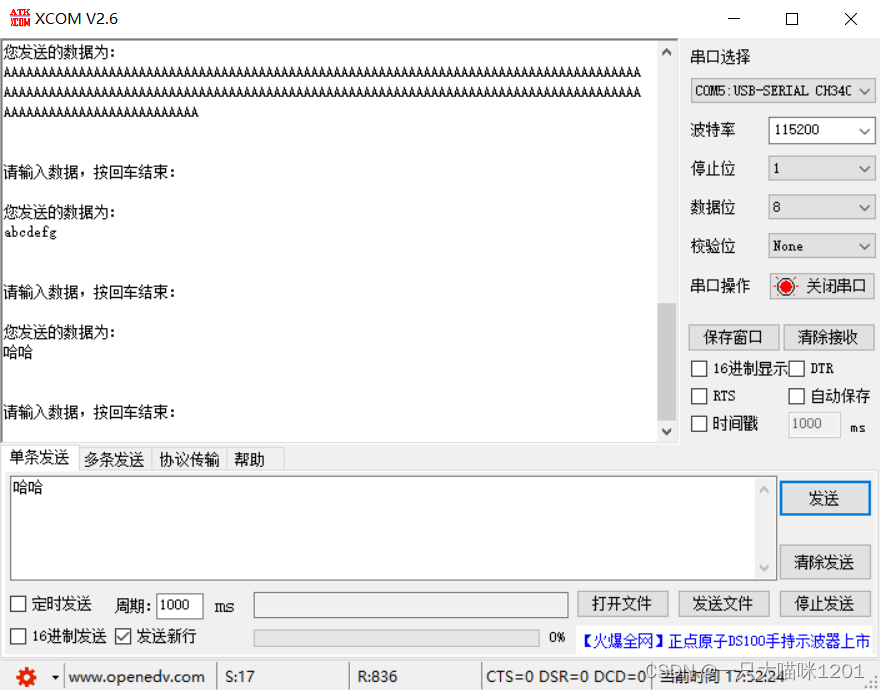
在串口调试助手上,输入内容后点发送,接收窗口就会显示输入的内容。
在没有输入时,开发板上的LED灯在不停闪烁,这里就不拍开发板的照片了。😾总结
该实验主要在于主程序的编写,因为其他初始化函数都是ST官方提供的库函数,我们如果需要使用到的是其他串口或者有其他的要求,只需要对库函数稍作修改即可。
-
相关阅读:
MyBatis基础
基于MxNet实现目标检测-CenterNet【附部分源码及模型】
迎七一党史知识竞赛答题怎么做
C/C++内存管理(一)---->new和delete
优秀代码赏读之第一篇
运放噪声频率曲线-运放噪声计算-运算放大器
1224. 最大相等频率(数组)
瑞吉外卖学习笔记3
在微信小程序中怎么做投票活动
相关系数矩阵转换成稀疏矩阵
- 原文地址:https://blog.csdn.net/weixin_63726869/article/details/125358611