-
【Camera基础(二)】摄像头驱动原理和开发&&V4L2子系统驱动架构
摄像头驱动原理和开发&&V4L2子系统驱动架构
一、导入

二、摄像头数据输出格式
1、USB、VS、MIPI摄像头架构
- MIPI接口摄像头支持的分辨率、帧率更高,功率低。
- MIPI比USB成本更低,USB摄像头昂贵。
- USB摄像头开发工作量少,一般都是免驱的。
2、RAW RGB DATA
RAW RGB是sensor的bayer阵列获取的数据(每种传感器获得对应的颜色亮度),摄像头sensor经过光电转换后输出的数据就是RAW data(RAW RGB)。在Sensor中,每一个感光点只能感光RGB其中的一种颜色。所以,通常所说的30万像素或130万像素等,指的是有30万或130万个感光点,每一个感光点只能感光一种颜色。
RGB:传统的红绿蓝格式。比如RGB565,其16bit数据格式为5bitR+6bitG+5BitB,G多一位,原因是人眼对绿色比较敏感。

3、RAW RGB与RGB的区别
- RAW RGB每个像素只有一种颜色(R、G、B中的一种)
- RGB每个像素都有三种颜色,每一个值在0-255之间。
- 由sensor输出的数据RAW DATA(RAW RGB),经过ISP的彩色插值转换就变成了RGB。
4、YUV
Y表示亮度分量(Luma):如果只显示Y的话,图像看起来会是一张黑白照。
U(Cb)表示色度分量:是照片蓝色部分去掉亮度(Y)。
V(Cr)表示色度分量:是照片红色部分去掉亮度(Y)。
①YUV的优点:
与RGB相比,他的优点在于占用更少的空间
②YUV的采样格式
主流的采样方式有三种,YUV4:4:4,YUV4:2:2,YUV4:2:0
图像质量:YUV4:4:4>YUV4:2:2>YUV4:2:0

YUV4:4:4采样,每一个Y对应一组UV分量。意思是4个像素里面的数据有4个Y,4个U,4个V。
YUV4:2:2采样,每一个Y对应一组UV分量。意思是4个像素里面的数据有4个Y,2个U,2个V。
YUV4:2:0采样,每一个Y对应一组UV分量。意思是4个像素里面的数据有4个Y,1个U,1个V。
③YUV的存储格式
YUV的存储格式分为打包格式(packet formats)和平面格式(planar formats)。- 对于planar的YUV格式,先连续存储所有像素点的Y,随后存储U、V。存储类型表示为采样方式后缀加P,如YUV422P、YUV420P。
- 对于packet的YUV格式,每个像素点的Y,U,V是连续交替存储的。存储类型表示为采样方式后缀加SP,如YUV422SP、YUV420SP。

一帧YUV420图像中,u和v分量占用的空间大小分别是原来像素数的1/4,占用的总大小就是widthheigth(3/2)
一帧YUV422图像中,u和v分量占用的空间大小分别是原来像素数的一半,占用的总大小就是widthheigth2
5、MJPEG/H264编码格式
有些摄像头sensor支持输出MJPEG/H264编码格式的,是因为其内置了DSP处理器,将YUV数据编码后输出MJPEG/H264码流。
问题:什么情况下需要用到编码?有什么作用? - 互联网传输,减少带宽。
- 视频编码兼容,统一视频编码标准。
三、视频编码原理

1、视频编码的发展历程

2、视频编码原理
I帧:关键帧,采用帧内压缩技术。
P帧:向前参考帧,在压缩时,只参考前面处理过的帧,采用帧间压缩技术。
B帧:双向参考帧,在压缩时,它既参考前面的帧,又参考它后面的帧,采用帧间压缩技术。
除了I/P/B帧外,还有图像序列GOP。
GOP:两个I帧之间是一个图像序列,在一个图像序列中只有一个帧。在码率不变的前提下,GOP值越大,P、B帧的数量会越多,平均每个I、P、B帧所占用的字节数就越多,也就更容易获取较好的图像质量。如图:

四、V4L2子系统驱动架构
V4L2:是linux内核中关于视频设备的内核驱动框架,为上层访问底层的视频设备提供了统一的接口。

V4L2驱动核心:主要是构建一个内核中标准视频设备驱动的框架,为视频操作提供统一的接口函数。
平台V4L2设备驱动:在V4L2框架下,根据平台自身的特性实现与平台相关的V4L2驱动部分,包括注册video_device和v4l2_dev
具体的sensor驱动:主要上电、提供工作时钟、视频图像裁剪、流IO开启等,实现各种设备控制方法供上层调用并注册v4l2_subdev。
UVC:是一种usb视频设备驱动。用来支持usb视频设备,凡是usb接口的摄像头都能够支持。

V4L2的核心源码位于drivers/media/v4l2-core,根据功能可以划分为四类:- 字符设备模块:由v4l2-dev.c实现,主要作用申请字符主设备号、注册class和提供video device注册、注销等相关函数。
- v4l2基础框架L:由v4l2-device.c、v3l2-subdev.c、v3l2-fh.c、v4l2-ctrls.c等文件构建v4l2基础框架。
- videobuf管理:由videobuf2-core.c、videobuf2-dma-contig.c、videobuf2-dma-sg.c、videobuf2-memops.c、videobuf2-vmalloc.c、v3l2-mem2mem.c等文件实现,完成videobuffer的分配、管理和注销。
- loctl框架:由v4l2-ioctl.c文件实现,构建v4l2 ioctl的框架。
V4L2注册流程:

videobuf管理:
V4L2 ioctl框架
用户空间对V4L2设备的操作基本都是ioctl来实现的,V4L2设备都有大量可操作的功能(配置寄存器),所以V4L2的ioctl也是十分庞大的。

V4L2驱动主要使用的ioctl命令值如下:

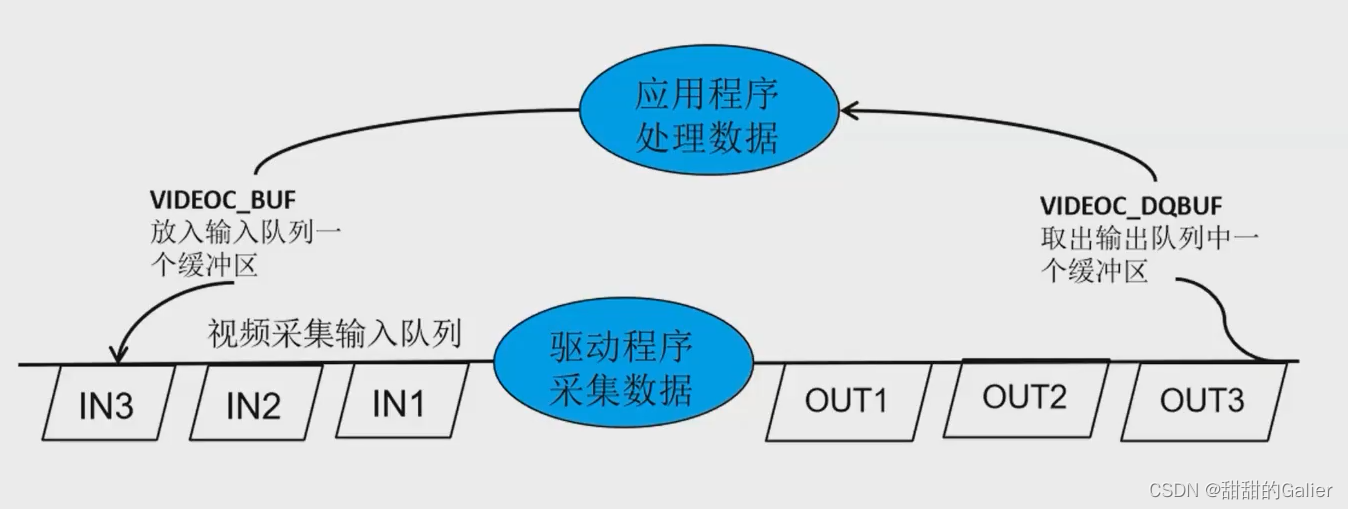
五、摄像头视频采集流程

摄像头数据流:

六、常见典型问题
1、摄像头画面卡顿
- 帧率不足
- usb带宽不足
- 视频采集格式设置出错:YUV、MJPEG或H264格式
- 编解码问题
- CPU占用高
2、摄像头画面旋转90度或180度问题
3、摄像头画面打不开问题
-
相关阅读:
SpringBoot之视图解析
苍穹外卖 -- day11 - Apache ECharts- 营业额统计- 用户统计- 订单统计- 销量排名Top10
如何在3GPP网站找到自己需要的技术标准/报告
2021年中国研究生数学建模竞赛B题——空气质量预报二次建模
浏览器Browser截屏截长图使用记录220813
Spring Boot中常用的参数传递注解
(web前端网页制作课作业)使用HTML+CSS制作非物质文化遗产专题网页设计与实现
OA管理系统源码
以单颗CMOS摄像头重构三维场景,维悟光子发布单目红外3D成像模组
C++11标准模板(STL)- 算法(std::rotate)
- 原文地址:https://blog.csdn.net/qq_43533553/article/details/125409604