-
ROS学习(十八)机器人SLAM功能包——cartographer的安装与测试
前言
本篇主要介绍常用的slam功能包——cartographer,为谷歌开发,在计算资源有限的情况下,可以实现机器人在二维和三维条件下的定位及建图功能。目前该算法采用基于图网络的优化方法,主要基于激光雷达来实现SLAM。
一、安装
两种安装方式,编译安装和二进制文件安装。如果后期,有编译自己代码的需要,建议编译安装。编译安装,又有两种方法,即一键安装和分步安装。
1、编译安装
1.1 安装依赖
执行如下命令:
sudo apt-get install -y google-mock libboost-all-dev libeigen3-dev libgflags-dev libgoogle-glog-dev liblua5.2-dev libprotobuf-dev libsuitesparse-dev libwebp-dev ninja-build protobuf-compiler python-sphinx ros-kinetic-tf2-eigen libatlas-base-dev libsuitesparse-dev liblapack-dev- 1
1.2 初始化工作空间
为了不与现有功能包冲突,最好为cartographer专门创建一个工作空间catkin_google_ws,执行如下命令:
mkdir -p ~/catkin_google_ws/src cd ~/catkin_google_ws/src catkin_init_workspace- 1
- 2
- 3
1.3 下载功能包
执行如下命令:
cd ~ git clone https://github.com/serapann/ros-kinetic-cartographer.git cd ros-kinetic-cartographer cp -R * ~/catkin_google_ws/src- 1
- 2
- 3
- 4
1.4 编译安装
1.4.1 一键安装编译
依次执行如下命令:
cd ~/catkin_google_ws catkin_make_isolated --install --use-ninja- 1
- 2
等待一段时间,一键编译完成,效果如下:
添加环境变量,命令如下:sudo echo "source ~/catkin_google_ws/install_isolated/setup.bash" >> ~/.bashrc source ~/.bashrc- 1
- 2
1.4.2 分布安装
1.4.2.1 安装ceres-solver
依次执行如下命令:
git clone https://github.com/hitcm/ceres-solver-1.11.0.git cd ceres-solver-1.11.0 mkdir build cd build cmake .. make -j4 sudo make install- 1
- 2
- 3
- 4
- 5
- 6
- 7
1.4.2.2 安装cartographer
git clone https://github.com/hitcm/cartographer.git cd cartographer mkdir build cd build cmake .. -G Ninja ninja ninja test sudo ninja install- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
1.4.2.3 编译安装cartographer_ros
#安装cartographer_ros cd ~/catkin_google_ws/src git clone https://github.com/hitcm/cartographer_ros.git- 1
- 2
- 3
为了区分catkin_make和catkin_make_isolated之间的区别,这里两种编译过程都记录下。
方法1:catkin_make编译
cd ~/catkin_google_ws catkin_make- 1
- 2
因为上面操作将cartographer、ceres-solver、cartographer_ros都放进来了,报如下错误:

说前两者不能cmake,没有可以catkin编译的功能包,请使用catkin_ catkin_make_isolated编译。因为已经安装完前两者了,可以执行如下命令删掉:cd ~/catkin_google_ws/src rm -rf ceres-solver cartographer- 1
- 2
然后再进行catkin_make编译:
cd ~/catkin_google_ws catkin_make- 1
- 2
编译完成后,效果如下:

添加环境变量,执行如下命令:sudo echo "source ~/catkin_google_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc- 1
- 2
或者打开该文件,在文件尾添加如下一行:
gedit ~/.bashrc source /home/zt/catkin_google_ws/devel/setup.bash- 1
- 2
方法2:catkin_make_isolated编译
执行如下命令:
cd ~/catkin_google_ws catkin_make_isolated- 1
- 2
你会发现使用catkin_make_isolated编译的时间会明显更长,是一轮一轮编译的,catkin_make则不是。
catkin_make编译,在根目录生成build和devel 两个文件夹,而catkin_make_isolated编译,则在根目录生成build_isolated和devel_isolated两个文件夹。
编译完成后,效果如下:

添加环境变量,执行如下命令:
sudo echo "source ~/catkin_google_ws/devel_isolated/setup.bash" >> ~/.bashrc source ~/.bashrc- 1
- 2
2、二进制文件安装
ros在2019年7月份已经将cartographer集成在软件源里,可以使用如下命令直接安装:
sudo apt-get install ros-kinetic-cartographer*- 1
我是使用的编译安装,二进制文件安装,没有尝试。
二、仿真测试
1、启动2D slam demo
执行如下命令,下载2D数据集:
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag- 1
效果如下:

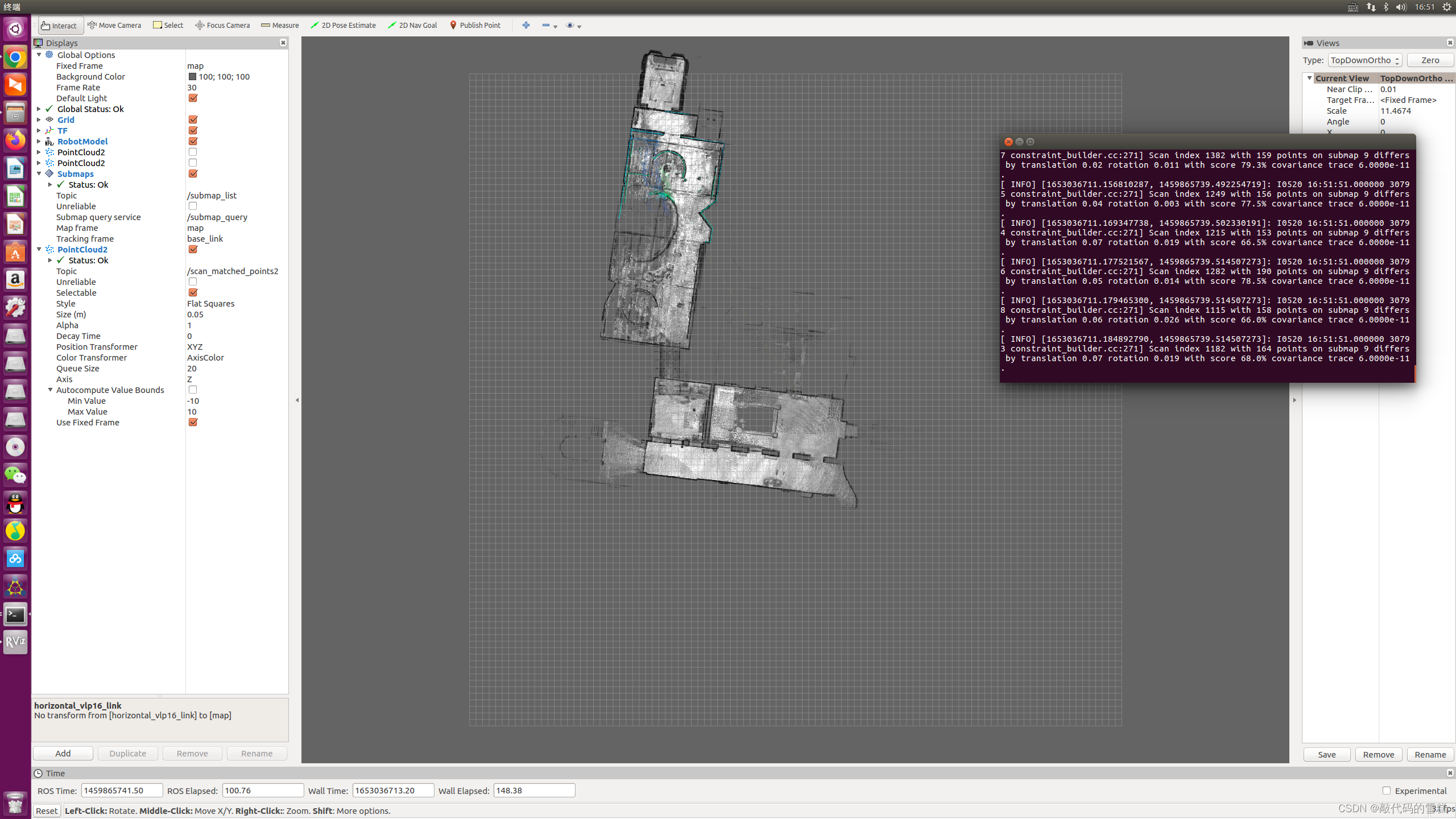
将下载好的数据集文件cartographer_paper_deutsches_museum.bag,移动到catkin_google_ws/src目录下,执行命令:roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/catkin_google_ws/src/cartographer_paper_deutsches_museum.bag- 1
效果如下:

2、启动3D slam demo
执行如下命令,下载3D数据集(文件较大):
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/b3-2016-04-05-14-14-00.bag- 1
效果如下:

将下载好的数据集文件b3-2016-04-05-14-14-00.bag,移动到catkin_google_ws/src目录下,执行命令:
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/catkin_google_ws/src/b3-2016-04-05-14-14-00.bag- 1
效果如下:
该demo使用3D雷达建模,可以调整RVIZ中的视角,看到3D雷达的信息。 -
相关阅读:
AXS2030 5.2W 单通道 AB/D 类音频功率放大器
Nginx网络服务的配置
web课程设计【网页设计】期末大作业html+css(个人网站)
项目git commit时卡主不良代码:husky让Git检查代码规范化工作
Docker 在 M1 Mac arm64架构上构建 amd64镜像。
详解如何保证消息队列不丢失消息(以kafka为例)
零基础自学SQL课程 | SQL中的日期函数大全
Leetcode原题电话号码的字母组合的两种解法【BFS-DFS】
Android App开机启动
K8S(5)HPA
- 原文地址:https://blog.csdn.net/u011832219/article/details/124878832