-
基于51单片机多功能防盗报警proteus仿真( proteus仿真+程序+设计报告+原理图+讲解视频)
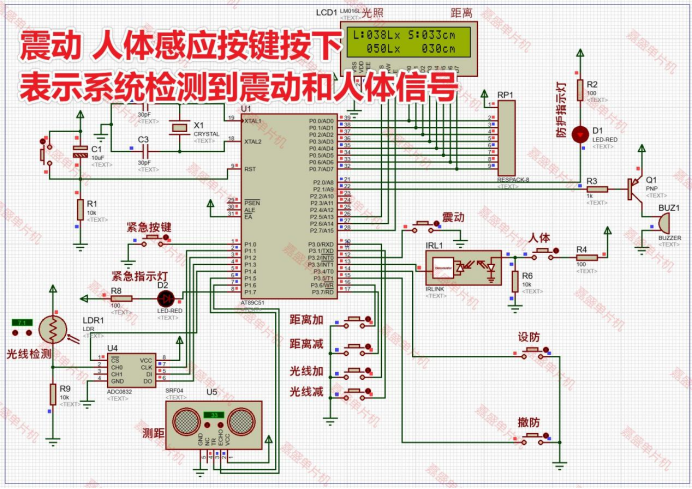
基于51单片机多功能防盗报警系统( proteus仿真+程序+设计报告+原理图+讲解视频)仿真图
proteus8.9及以上程序编译器:
keil 4/keil 5编程语言:
C语言设计编号:S0098
1. 主要功能:
基于51单片机的多功能防盗报警器仿真设计
1、系统可以测量光照和人体距离通过LCD1602显示,具备手动控制布防和撤防;
2、如果光照高于阀值,说明有人开窗入室,启动报警;
3、如果人体距离太近,说明有人靠近房屋,启动报警;
4、检测到异常振动,启动报警;
5、检测到人体红外,启动报警;
6、具有紧急按钮,在突发情况下手动启动报警;
7、可以通过按键设置光照阈值和报警距离;
51单片机、光照传感器、超声波传感器、震动传感器、人体红外检测传感器
需注意仿真中51单片机芯片是兼容的,AT89C51,AT89C52是51单片机的具体型号,内核是一样的。相同的原理图里,无论stc还是at都一样,引脚功能都是一样的,程序是兼容的,芯片可以替换为STC89C52/STC89C51/AT89C52/AT89C51等51单片机芯片。

以下为本设计资料展示图:
2. 讲解视频:
讲解视频包含仿真运行讲解和代码讲解
3. 仿真
打开仿真工程,双击proteus中的单片机,选择hex文件路径,然后开始仿真。开始仿真后LCD1602液晶显示光照强度和距离以及对应的报警值,默认开机时不设防模式,检测值超过阈值不做报警处理。具备手动控制布防和撤防;
 设防后,调整光照高于阀值,说明有人开窗入室,启动报警;
设防后,调整光照高于阀值,说明有人开窗入室,启动报警;
如果人体距离太近,说明有人靠近,启动报警;

震动按键按下,系统检测到异常振动,启动报警;人体感应按键按下系统检测到人体红外,启动报警;紧急按钮按下,在突发情况下手动启动报警;
系统可以通过按键设置光照阈值和报警距离;
4. 程序代码
使用keil4或者keil5编译,代码有注释,可以结合视频理解代码含义。
#include "reg51.h" #include "intrins.h" #define uchar unsigned char #define uint unsigned int sbit led=P2^0;//LED sbit out=P1^7; sbit beep=P2^1;//蜂鸣器 sbit k1=P3^4;//遥控输入 sbit k2=P3^5; sbit k3=P1^0; sbit s1=P3^6; sbit s2=P3^7; sbit s3=P3^0; sbit s4=P3^1; sbit rs=P2^5; //1602数据/命令选择引脚 H:数据 L:命令 sbit rw=P2^6; //1602读写引脚 H:数据寄存器 L:指令寄存器 sbit e =P2^7; //1602使能引脚 下降沿触发 sbit Trig = P1^5; sbit Echo = P1^6; sbit CLK= P1^1;//时钟,初始状态为0 sbit DI= P1^2;//数据输入 sbit DO= P1^3; // 数据输出 sbit CS= P1^4; uchar time=0; uint juli=0,lim1=30;//距离 uchar light=0,lim2=50;//光线 uchar disp1[]="L:000Lx S:000cm"; uchar disp2[]=" 000Lx 000cm"; /********************************************* 读取ADC **********************************************/ uchar ADC(uchar ch)//通道ch 1,2 { uchar temp0,temp1,i; CS=0; temp0=0; temp1=0; _nop_(); _nop_(); DI=1;//开始位 _nop_(); _nop_(); CLK=1; _nop_(); _nop_(); CLK=0; _nop_(); _nop_(); DI=0; _nop_(); _nop_(); //选择通道0 DI=1; _nop_(); CLK=1;//上升沿DI=1 _nop_(); CLK=0;//1个下降沿DI=1 _nop_(); if(ch==1) DI=0; if(ch==2) DI=1; _nop_(); CLK=1; _nop_(); CLK=0;//第3个上升沿DI=0 _nop_(); DI=1; //********通道选择结束开始读取转换后的二进制数**** //下降沿读数,一下进行判断和处理,共8次 for(i=0;i<8;i++) { temp0=temp0<<1; CLK=1; if(DO) temp0++; _nop_(); CLK=0; } for(i=0;i<8;i++) { temp1=temp1>>1; CLK=1; if(DO) temp1=temp1 +0x80; _nop_(); CLK=0; } CS=1; return temp0; } void StartModule()//启动模块 { _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); Trig=1; _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); Trig=0; } void HC_SRinit()//初始化 { TMOD|=0x11; //设T0为方式1,GATE=1; TH0=0; TL0=0; TH1=0x3c; TL1=0xb0; ET1=1; TR1=1; EA=1; Trig=0; } uint HC_SRread()//测距 { uint time=0; while(!Echo) //当RX为零时等待 StartModule(); //启动模块 TR0=1; //开启计数 while(Echo); //当RX为1计数并等待 TR0=0; //关闭计数 time=TH0*256+TL0; //计算 TH0=0; TL0=0; time=time*1.7/50; //精度0.5cm return time; } void delay_uint(uint i) { while(i--); } /******************************************************************** * 名称 : write_com(uchar com) * 功能 : 1602命令函数 * 输入 : 输入的命令值 * 输出 : 无 ***********************************************************************/ void write_com(uchar com) { e=0; rs=0; rw=0; P0=com; delay_uint(20); e=1; delay_uint(20); e=0; } /******************************************************************** * 名称 : write_data(uchar dat) * 功能 : 1602写数据函数 * 输入 : 需要写入1602的数据 * 输出 : 无 ***********************************************************************/ void write_data(uchar dat) { e=0; rs=1; rw=0; P0=dat; delay_uint(20); e=1; delay_uint(20); e=0; } /******************************************************************** * 名称 : write_string(uchar hang,uchar add,uchar *p) * 功能 : 改变液晶中某位的值,如果要让第一行,第五个字符开始显示"ab cd ef" ,调用该函数如下 write_string(1,5,"ab cd ef;") * 输入 : 行,列,需要输入1602的数据 * 输出 : 无 ***********************************************************************/ void write_string(uchar hang,uchar add,uchar *p) { if(hang==1) write_com(0x80+add); else write_com(0x80+0x40+add); while(1) { if(*p == '\0') break; write_data(*p); p++; } } /******************************************************************** * 名称 : init_1602() * 功能 : 初始化1602液晶 * 输入 : 无 * 输出 : 无 ***********************************************************************/ void init_1602() { write_com(0x38); //数据总线为8位,显示2行,5x7点阵 write_com(0x0c); //开显示,有光标,光标闪烁 write_com(0x06); //光标自动右移 delay_uint(1000); //等待设置完成 } //主函数 void main() { init_1602(); HC_SRinit();//初始化 //设置INT0 IT0=1;//跳变沿出发方式(下降沿) EX0=1;//打开INT0的中断允许。 //设置INT1 IT1=1;//跳变沿出发方式(下降沿) EX1=1;//打开INT1的中断允许。 EA=1; while(1) { if(!s1)//距离设置 { if(lim1<500) lim1++; while(!s1); } if(!s2)//距离设置 { if(lim1>0) lim1--; while(!s2); } if(!s3)//光照设置 { if(lim2<120) lim2++; while(!s3); } if(!s4)//光照设置 { if(lim2>0) lim2--; while(!s4); } if(!k1)//布防 { led=0; while(!k1); } if(!k2)//撤防 { led=1; out=1; beep=1; while(!k1); } if(!k3) //紧急 { out=0; beep=0; led=0; } if(!led) { //传感器报警 if((light>lim2)||(juli5. 设计报告
10296字设计报告,内容包括硬件设计、软件设计、软硬件框图、调试、结论等

随着现代社会经济的快速发展和人民生活水平的不断提升,社会治安需求呈现出多元化、精细化的特点。无论是居民住宅还是小型商业场所,其安全防护问题已不再仅局限于物理屏障的构筑,而是愈发强调智能化、主动化的安全保障。在这样的背景下,家庭及小型商业场所的安全防护需求日益凸显,成为社会关注的焦点之一。
传统的防盗报警器,尽管在一定程度上起到了预警与震慑的作用,但在实际应用中却暴露出诸多局限性。这类报警器往往功能较为单一,主要依赖于门窗磁感应、红外人体探测等基础手段,对于复杂多变的入侵情境往往难以做出精准、及时的响应。比如,对于非法翻越窗户、遮挡红外探头、利用工具破坏门窗等手法,传统报警器的侦测能力相对有限。此外,传统报警器在误报率、远程监控、自适应环境变化等方面也存在不足,无法满足现代用户对于高效、精准、便捷安全防护的期待。
针对上述问题,本课题提出了设计一款基于51单片机的多功能防盗报警器的研究任务。该报警器旨在突破传统设备的功能局限,通过集成先进的传感器技术,构建全方位、智能化的安防监控体系,从而显著提升家庭及小型商业场所的安全防护水平,同时优化用户体验。
6. 原理图
原理图使用AD绘制,可供实物参考,仿真不同于实物,经验不足不要轻易搞实物。

元件 型号 数量
单片机 AT89C51 1
电容 30pf 2
电容 10uf 1
晶振 12MHZ 1
电阻 10k 1
按钮 5
电阻 100欧 4
LED 红色 2
三极管 PNP 1
蜂鸣器 有源 1
电阻 1k 1
热释电 HCSR501 1
超声波 HC-04 1
光敏电阻 10k 1
模数芯片 ADC0832 1
电源部分
排针 2P 1
电容 0.1uf 2
电容 100uf 2
稳压器 7805 1
Proteus仿真和实物作品的区别:
1.运行环境:Proteus仿真是在计算机上运行的,而实物则是在硬件电路板上运行。
2.调试方式:在Proteus仿真中,可以方便地进行单步调试和观察变量值的变化,而在实物中则需要通过调试器或者串口输出等方式进行调试。
电路连接方式:在Proteus仿真中,可以通过软件设置进行电路连接的修改,而在实物中则需要通过硬件电路板和连接线进行修改。
3.运行速度:Proteus仿真通常比实物运行速度快,因为仿真是基于计算机运行的,而实物则需要考虑电路板上的物理限制和器件的响应时间等因素。
4.功能实现:在Proteus仿真中,可以通过软件设置实现不同的功能,而在实物中则需要根据电路设计和器件的性能进行实现。
7. 设计资料内容清单&&下载链接
资料设计资料包括仿真,程序代码、讲解视频、功能要求、设计报告、软硬件设计框图等。
0、常见使用问题及解决方法–必读!!!!
1、程序代码注释
2、proteus仿真
3、功能要求
4、软硬件流程图
5、开题报告
6、设计报告
7、原理图
8、元器件清单
9、讲解视频
Altium Designer 安装破解
KEIL+proteus 单片机仿真设计教程
KEIL安装破解
Proteus元器件查找
Proteus安装
Proteus简易使用教程
单片机学习资料
相关数据手册
答辩技巧
设计报告常用描述
鼠标双击打开查找嘉盛单片机51 STM32单片机课程毕业设计.url

资料下载链接(可点击):
FFmpeg学习总结
Python3 基础语法
基于javaweb的毕业设计毕业论文管理系统(java+ssm+jsp+tomcat+mysql)
作为公司测开岗的面试官,我是怎么选人的....
想找一个英文的二元分类数据集,类似sst2这种
使用Unity的Input.GetAxis(““)控制物体移动、旋转
Java-ForkJoinPool(线程池-工作窃取算法)
JS实时获取录音数据并播放
Leetcode 141:环形链表