-
基于XYZRGB点云实现欧式聚类分割算法C++代码
一.算法效果
点云聚类算法,顾名思义,就是找出点云中相同类型的点,这些点称为一个个簇,也就是说点云聚类是找出点云中相同类型的点簇,类型包括距离,颜色,法相等。欧式聚类算法基于点之间的欧式距离来对点云进行聚类,算法效果如下:
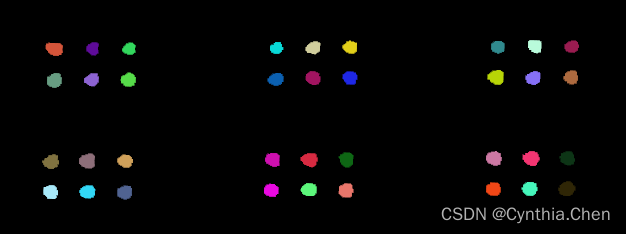
图1点云欧式聚类分割效果图 二.算法原理
分割思路
欧式聚类以一个点p开始,设置一个距离,遍历点云中点q,若点p,q间欧式距离小于设定距离的,则点p,q是同一个类型,将其加入p点所在点云簇,重复上述步骤,直到找不到满足距离条件的点为止,这样就得到了一个簇。依次类推,迭代点云中其它的点,最后点云就会分割成一个个的簇。对点云簇进行过滤,去掉点数过多或者过少的簇,即可获得需要的点云簇。
算法伪代码
1. 设置搜索半径d,最小点数阈值min_n,最大点数阈值max_n; 2. 为点云P创建KD-Tree搜索树; 4. 创建空的聚类列表C和点云的检查队列Q; 5. 对于P中的每一个点Pi,执行如下操作: 6. - 将Pi添加到当前队列Q, 并将Pi标记为已处理; 7. - while处理 Q 中的每一个Pi: 8. - 对Pi进行近邻搜索,查找满足半径 < d 的点集合; 9. - 检查上一步中每一个邻居点,如果标记是未被处理的点,则加入到队列Q中; 10. - 直到Q中的所有点都被标记为已处理,将Q加入到聚类列表C中,将Q重新置为空 11. 当所有的Pi都被处理过之后结束,聚类结果为列表C; 12. 对点云簇C进行过滤,去掉点数过多或者过少的簇,即可获得满足条件的点云簇。三.C++代码实现
1.环境配置
VS2019 + PCL1.12.1
2.C++代码
1.头文件 EuclideanClusters.h
#include#include #include #include class EuclideanClusters { public: typedef std::shared_ptr<EuclideanClusters> Ptr; typedef std::shared_ptr<const EuclideanClusters>ConstPtr; using KdTree = pcl::search::Search<pcl::PointXYZRGB>; using KdTreePtr = typename KdTree::Ptr; EuclideanClusters(); ~EuclideanClusters() {} //输入点云 void setInputCloud(pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud_in) { cloud_in_ = cloud_in; } //设置近邻点搜索方法 inline void setSearchMethod(const KdTreePtr& tree) { tree_ = tree; } //设置点云簇间欧式距离容差 inline void setClusterTolerance(double tolerance) { cluster_tolerance_ = tolerance; } //设置最小聚类点数 inline void setMinClusterSize(pcl::uindex_t min_cluster_size) { min_pts_per_cluster_ = min_cluster_size; } //设置最大聚类点数 inline void setMaxClusterSize(pcl::uindex_t max_cluster_size) { max_pts_per_cluster_ = max_cluster_size; } //获取错误消息 std::string getErrorMessage() { return error_msg_; } //调用接口,输出点云簇的id向量 bool extract(std::vector<pcl::PointIndices>& clusters); private: //input pameters pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud_in_; KdTreePtr tree_; float cluster_tolerance_; pcl::uindex_t min_pts_per_cluster_; pcl::uindex_t max_pts_per_cluster_; //error message std::string error_msg_; }; 2.源文件 EuclideanClusters.cpp
#include "segment/EuclideanClusters.h" inline bool comparePointClusters(const pcl::PointIndices& a, const pcl::PointIndices& b) { return (a.indices.size() < b.indices.size()); } EuclideanClusters::EuclideanClusters() { cloud_in_.reset(new pcl::PointCloud<pcl::PointXYZRGB>); } bool EuclideanClusters::extract(std::vector<pcl::PointIndices>& clusters) { // Check if the tree is sorted -- if it is we don't need to check the first element int nn_start_idx = tree_->getSortedResults() ? 1 : 0; pcl::IndicesPtr indices(new pcl::Indices); indices->resize(cloud_in_->size()); // Create a bool vector of processed point indices, and initialize it to false std::vector<bool> processed(cloud_in_->size(), false); pcl::Indices nn_indices; std::vector<float> nn_distances; // Process all points in the indices vector for (int index = 0; index < cloud_in_->size(); index++) { if (processed[index]) continue; pcl::Indices seed_queue; int sq_idx = 0; seed_queue.push_back(index); processed[index] = true; while (sq_idx < static_cast<int> (seed_queue.size())) { // Search for sq_idx int ret = tree_->radiusSearch(cloud_in_->at(seed_queue[sq_idx]), cluster_tolerance_, nn_indices, nn_distances); if (ret == -1) { error_msg_ = "Received error code -1 from radiusSearch\n"; return false; } if (!ret) { sq_idx++; continue; } for (std::size_t j = nn_start_idx; j < nn_indices.size(); ++j) // can't assume sorted (default isn't!) { if (nn_indices[j] == pcl::UNAVAILABLE || processed[nn_indices[j]]) // Has this point been processed before ? continue; // Perform a simple Euclidean clustering seed_queue.push_back(nn_indices[j]); processed[nn_indices[j]] = true; } sq_idx++; } // If this queue is satisfactory, add to the clusters if (seed_queue.size() >= min_pts_per_cluster_ && seed_queue.size() <= max_pts_per_cluster_) { pcl::PointIndices r; r.indices.resize(seed_queue.size()); for (std::size_t j = 0; j < seed_queue.size(); ++j) // This is the only place where indices come into play r.indices[j] = seed_queue[j]; // These two lines should not be needed: (can anyone confirm?) -FF //r.indices.assign(seed_queue.begin(), seed_queue.end()); std::sort(r.indices.begin(), r.indices.end()); r.indices.erase(std::unique(r.indices.begin(), r.indices.end()), r.indices.end()); r.header = cloud_in_->header; clusters.push_back(r); // We could avoid a copy by working directly in the vector } } // Sort the clusters based on their size (largest one first) std::sort(clusters.rbegin(), clusters.rend(), comparePointClusters); if (clusters.empty()) { error_msg_ = "Euclidean clusters segment error.\n"; return false; } return true; }3.主函数 main.cpp
#include//io #include #include #include #include #include "point_cloud/include/io/cloud_io.h" #include "point_cloud/include/segment/EuclideanClusters.h" bool euclideanClusterExtraction(pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud_in, std::vector <pcl::PointCloud<pcl::PointXYZRGB>::Ptr>& cloud_out_vec); int main(int argc, char *argv[]) { //load cloud std::string file_name = "..\\Data\\clouds\\test.csv"; pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_in(new pcl::PointCloud<pcl::PointXYZRGB>()); if (!io::loadCSV2PCDXYZRGB(file_name, cloud_in)) { std::cout << "Loaded cloud error!" << std::endl; return -1; } std::cout << "Loaded cloud " << cloud_in->size() << " data points. " << std::endl; std::vector <pcl::PointCloud<pcl::PointXYZRGB>::Ptr> cloud_hull_vec; if (!euclideanClusterExtraction(cloud_in, cloud_hull_vec))return false; //viewer pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D viewer")); std::string str = "cloud_in"; //pcl::visualization::PointCloudColorHandlerRGBField -
相关阅读:
Android基础第十天 | 字节跳动第四届青训营笔记
Spring Boot框架下实现Excel服务端导入导出
【Mindspore】ResizeArea涉及的infershape问题
Linux安装jdk-18.0.2
SegGPT: Segmenting Everything In Context论文笔记
字节跳动软件测试岗,收到offer后我却拒绝了~给面试的人一些忠告....
阿杰的事情
Java Rsa 签名 验签
前瞻视野 | 数字化转型领先企业的六大习惯
ceph-ansible安装指南-centos8安装ceph- pacific
- 原文地址:https://blog.csdn.net/weixin_38342946/article/details/139294061