-
Nature 哈佛新型超材料Metafluid粘度、透明度、弹性可变,可用于编程液压机器人
液体都有“智能”、可编程了?
最近,一种被称为“智能"液体的多功能可编程的新型超材料——Metafluid,登上了Nature。
它由哈佛大学SEAS的研究团队研发,据说可自由调节弹性、光学特性、粘度。
甚至能够在牛顿流体和非牛顿流体之间转换。
研究人员表示,有了这些buff属性加成,该流体在编程液压机器人、智能减震器、光学设备中都有巨大的应用潜力。
可编程的“智能液体”
为什么说可用于编程液压机器人等技术?奥秘就在这张图中:
来看研究人员的展示。
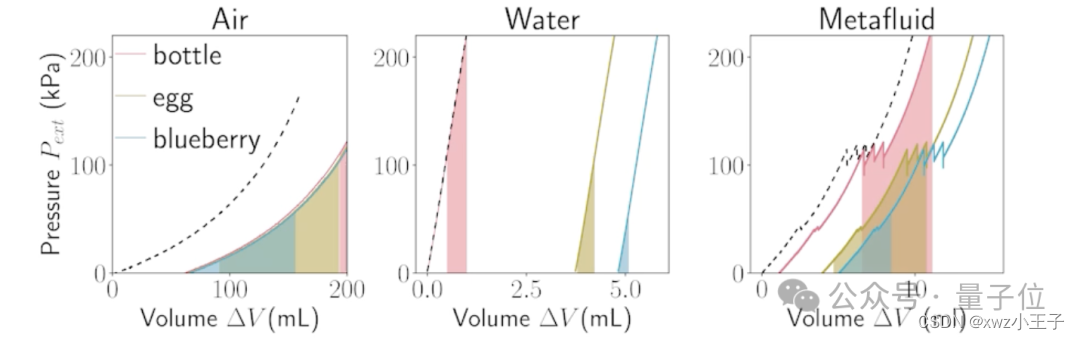
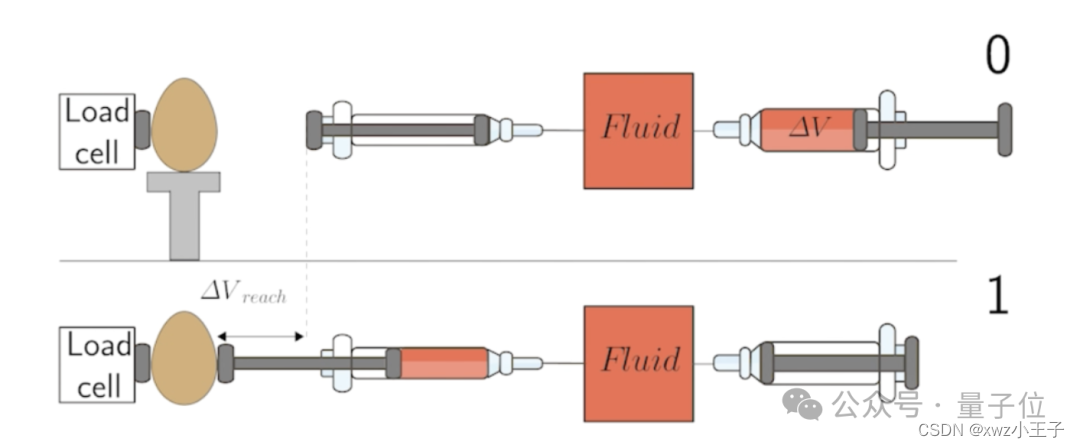
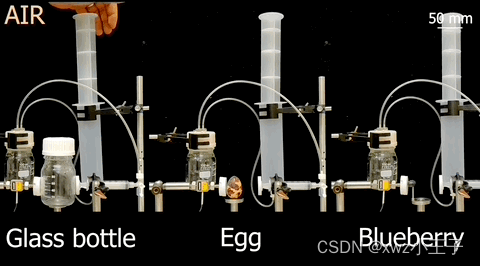
研究人员设计了一个抓取器,用空气和水作对照,通过抓取玻璃瓶、鹌鹑蛋、蓝莓,来表现Metafluid对抓取器具有弹性控制能力的原理。
装置如下图,一个注射器从一头注入,另一头的注射器受压力驱动“抓手”:
注入空气量相同的情况下,玻璃瓶刚好能抓稳,鹌鹑蛋和蓝莓直接被压烂。
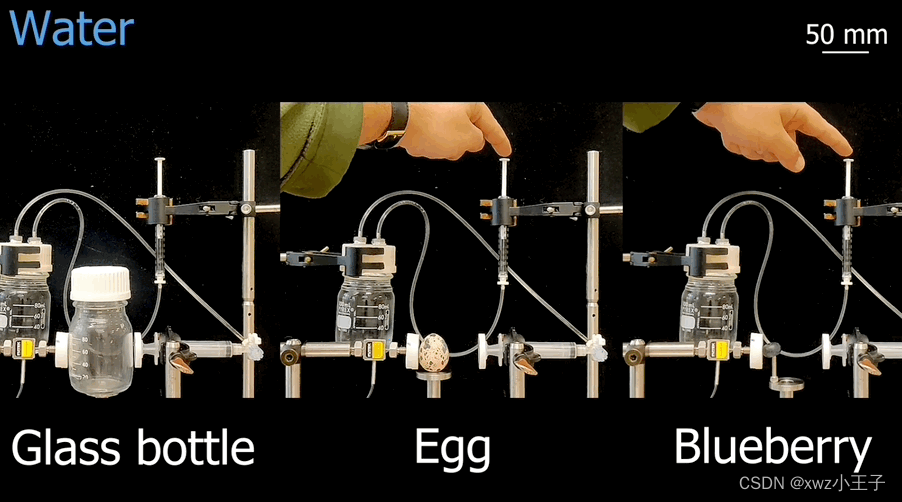
注入水量相同的情况下,玻璃瓶刚好能抓稳,鹌鹑蛋和蓝莓这边又压力太小碰都碰不到:
也就是说,使用空气和水都很难找到一个供给体积ΔV能够成功抓取三种物品。
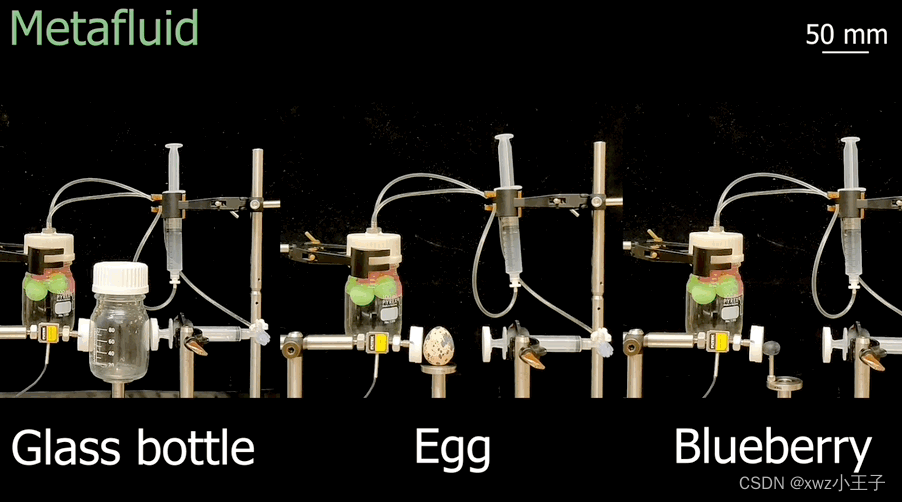
而这种Metafluid,可以明显找到一个能成功抓取三样物品的ΔV,可适应不同物体的大小和所需的抓取力度:
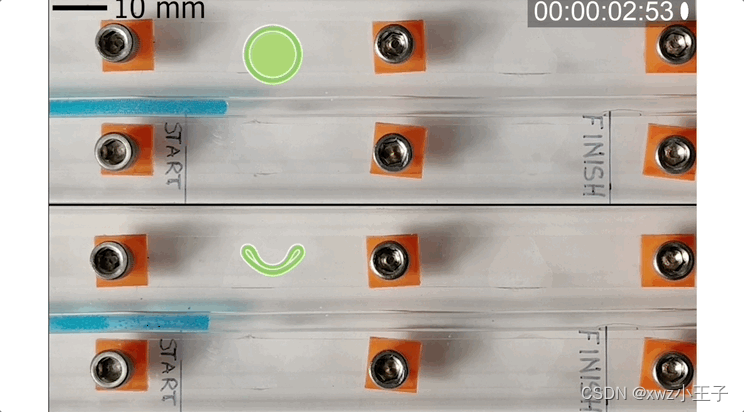
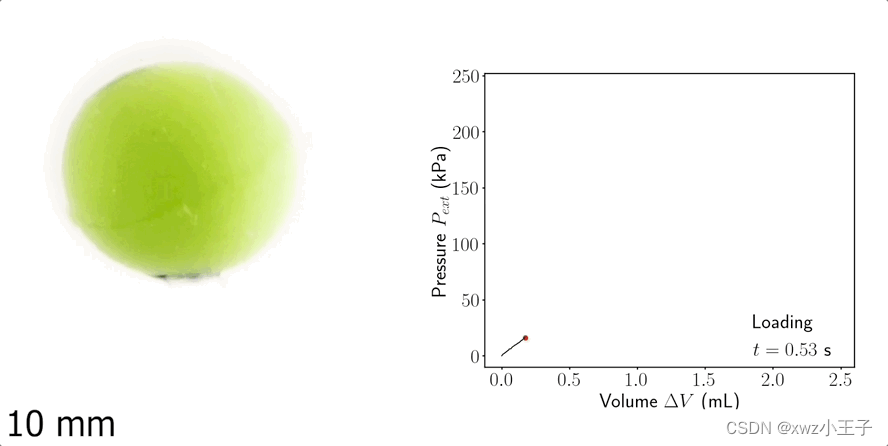
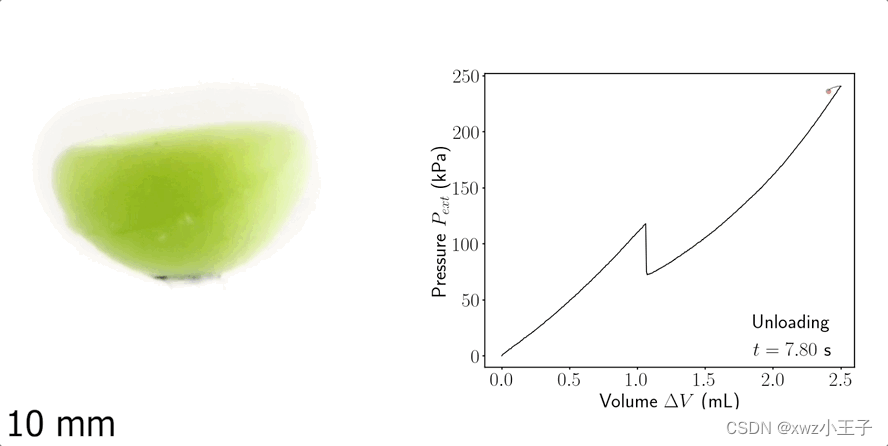
下面这个实验,将Metafluid的弹性可压缩更直观的表现了出来,压力影响下,甘油很快就把软管撑起了一个大包,而Metafluid的临界点显然还要靠后一些:
而且它的黏性和流动性也会发生变化:
那这种流体是怎么做出来的?为何会有这些属性?
原来是“球球大作战”
众所周知,超材料是一种人造材料,其特性由其结构而不是成分决定。传统上,大多数超材料都是固态的,即构建块被布置在晶格结构内的固定位置。
最近有些研究认为将不相连的构建块混合在流体介质中具有巨大潜力。哈佛研究人员正是受到了这种研究思路的启发,制出了Metafluid。经过一系列展示,想必有人也已经猜到了,构建Metafluid的关键,是一种可高度变形的弹性空心球形胶囊。将球形胶囊混合到不可压缩的悬浮液中,Metafluid就制成了。
原理简单来讲,就是当液体内部的压力增加时,胶囊屈曲,也就是塌陷形成类似透镜的半球状。
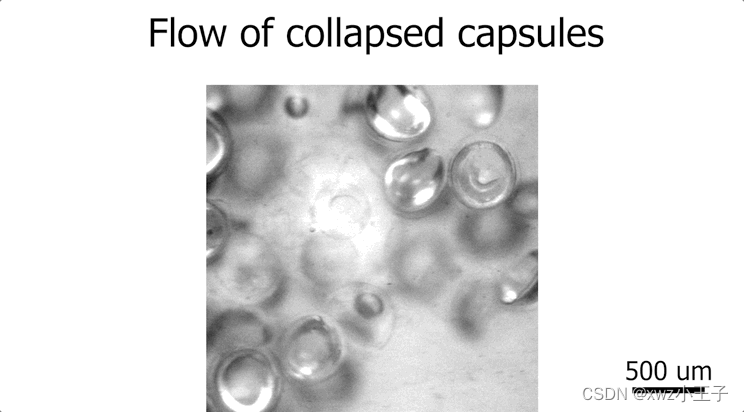
胶囊屈曲后在流体中的流动现象
当那个压力被移除时,胶囊会弹回到它们的球形状态,由此改变液体粘度和透明度等属性,而胶囊的数量、厚度和大小也会有影响。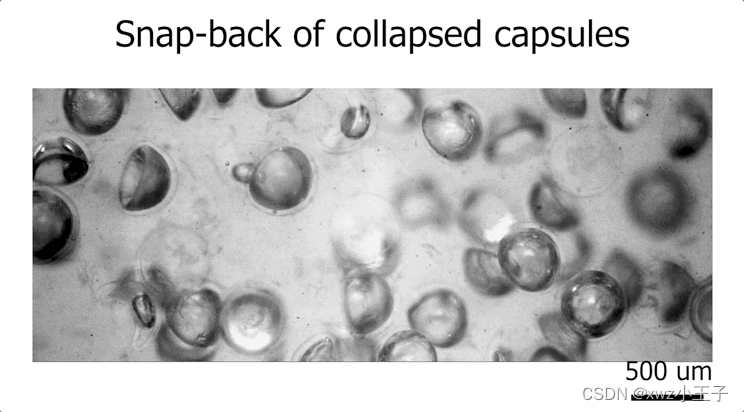
去除压力胶囊还原成球形状态
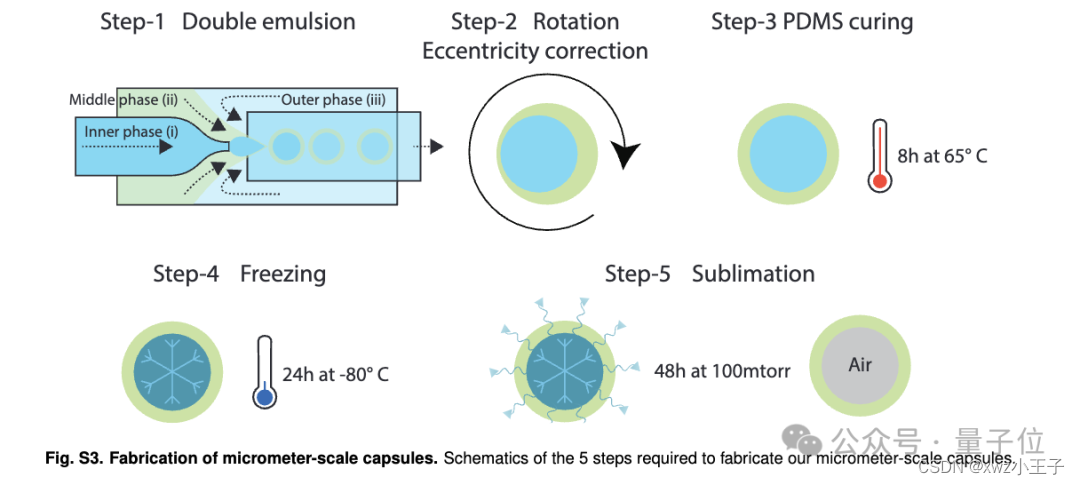
具体来说,研究人员先是制作了两种规模的胶囊:厘米级和微米级。其中厘米级胶囊使用硅橡胶材料,通过3D打印模具来制作。
也有两个size:
小胶囊:外半径(Ro)为10毫米,壳体厚度(t)为2毫米。
大胶囊:外半径(Ro)为30毫米,壳体厚度(t)为6毫米。
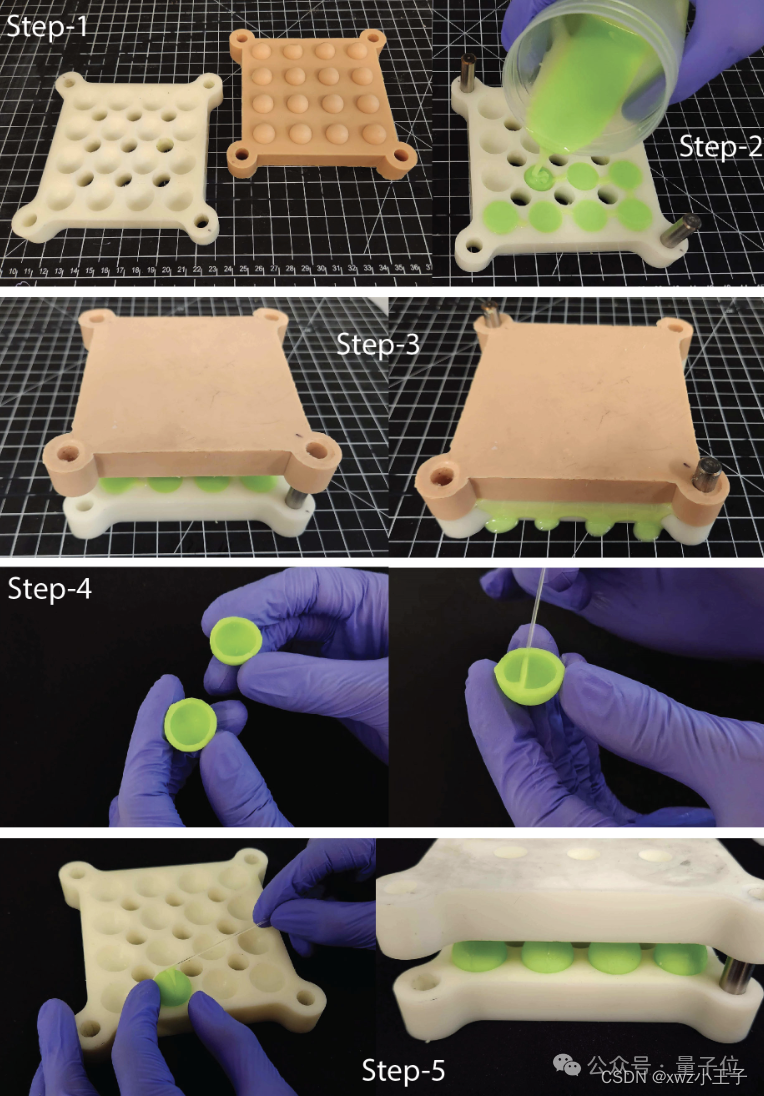
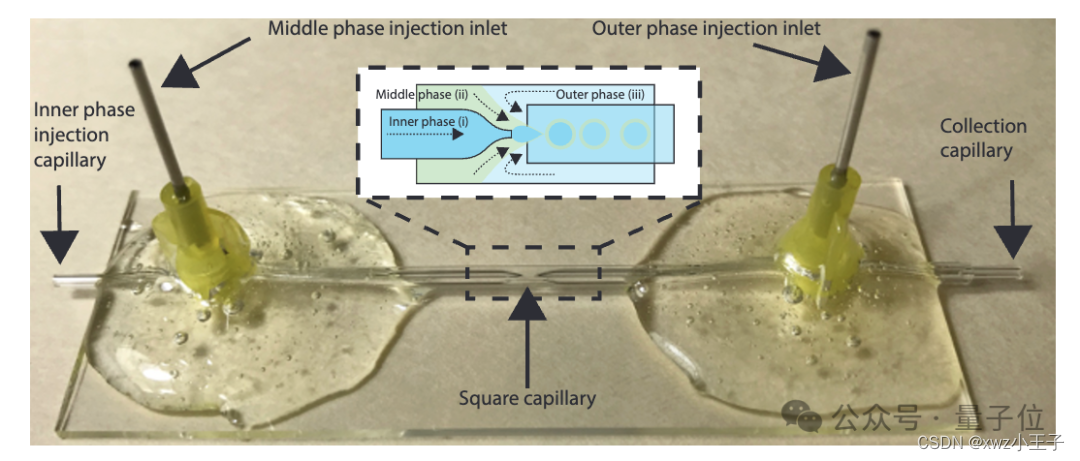
微米级胶囊使用聚二甲基硅氧烷(PDMS)材料,采用微流控共轴流聚焦技术制造,外半径(Ro)约为250微米,壳体厚度(t)约为65微米。
然后,研究人员使用厘米级胶囊进行了单胶囊、多胶囊实验,此外还进行了微米级胶囊实验。
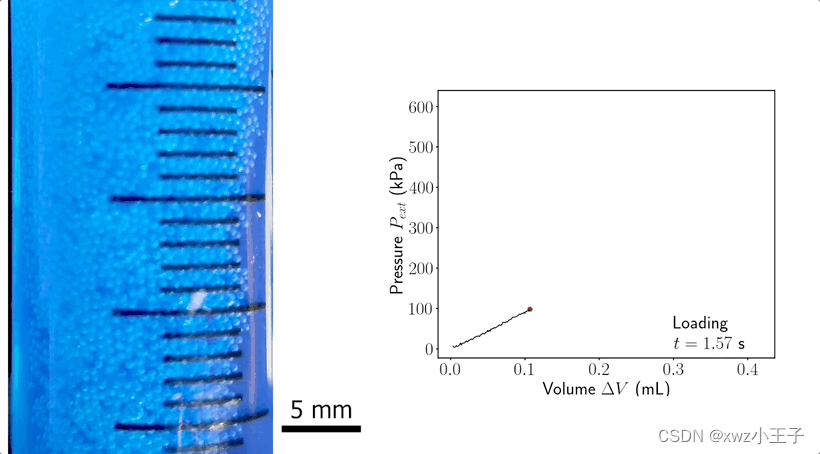
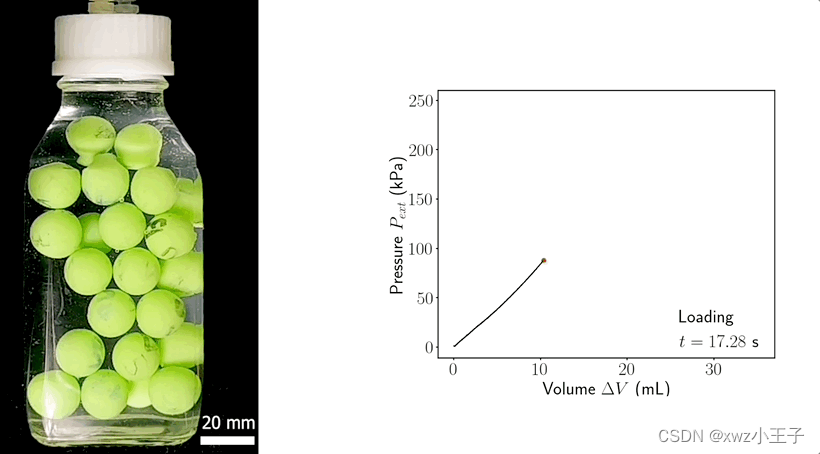
厘米级胶囊实验中,研究人员将胶囊放置在一个玻璃圆柱容器中,容积为Vtot,并用水作为悬浮液完全填充。之后用注射泵慢慢引入额外的水ΔV,通过差压传感器测量容器内的压力。
他们先分别用单个的厘米级小胶囊和大胶囊做了实验。
将单个小胶囊放入容积300ml的容器中。他们观察到的压力-体积曲线与水相比有显著差异,不仅因为胶囊增加了流体的可压缩性,还因为在临界压力Pcr=120kPa处出现了明显的压力下降。
这一下降正是由胶囊弹性壳体的突变形引起,随着ΔV的增加,形成的凹陷更为明显。当ΔV减少时,凹陷逐步减小,并且当压力下降至临界压力Pdown=50kPa时,胶囊会弹性回复至球形,产生滞后效应。
如下图c红线所示,单个大胶囊实验中,在较低的初始体积模量(K0=18 MPa)下,在P=120kPa处仍然出现了压力下降。这也就意味着Metafluid的初始体积模量和临界压力可以通过改变胶囊体积分数和胶囊壳厚度与外半径的比值来分别独立调整。
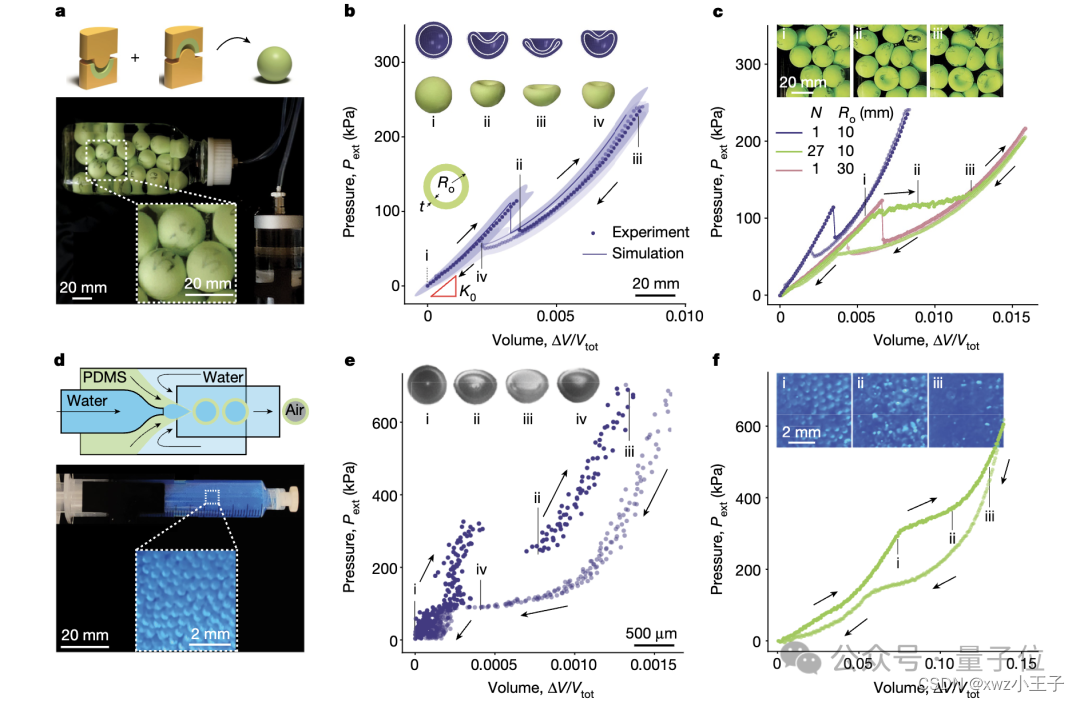
接下来,研究人员在更大的容器中填充27个小胶囊,保持胶囊体积分数和壳体厚度与外半径比值不变。如上图c绿线,实验显示所有胶囊在临界压力附近同时发生屈曲,但与单个胶囊相比,压力突降被多个小的突降所取代,形成了压力平台。
微米级胶囊实验中,悬浮液改为硅油。
微米级胶囊悬浮液的压力-体积曲线显示出与厘米级胶囊相似的非线性行为,但由于制造过程中的几何缺陷,微尺度胶囊的Metafluid没有那么明显的平台现象。
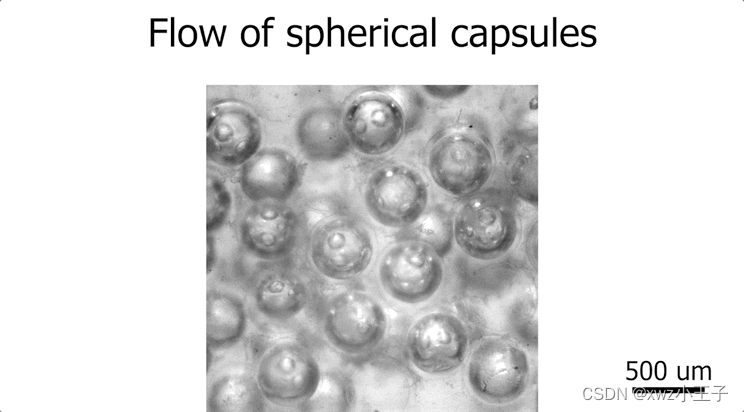
球形胶囊在流体中的流动现象
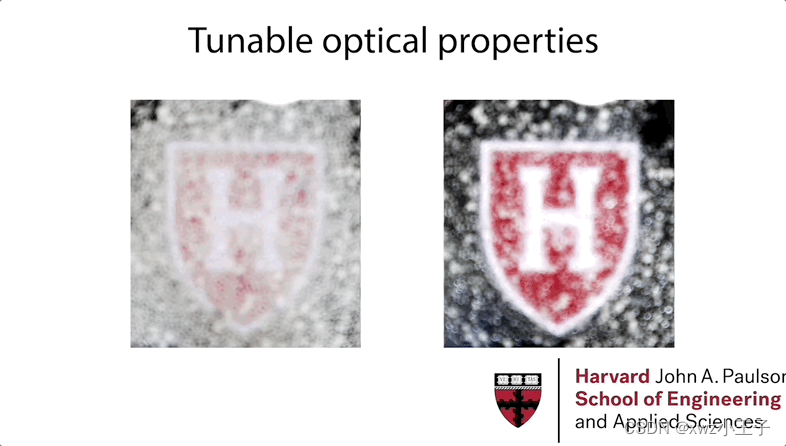
研究人员还研究了胶囊屈曲对Metafluid光学特性的影响。他们使用COMSOL软件进行光线追踪模拟,发现球形和屈曲状态的胶囊显示出不同的散射行为。实验中,他们测量了通过微米级胶囊悬浮液传输的光功率,并发现在胶囊屈曲时,透射率显著增加。这种变化归因于胶囊屈曲造成的“透镜效应”和胶囊覆盖面积的减少。
此外,研究人员还探讨了胶囊屈曲对Metafluid流变性的影响。他们使用平行板流变仪来测量Metafluid在不同胶囊状态下的粘度。
结果表明,当胶囊处于球形状态时,Metafluid表现出牛顿流体的特性,而当胶囊屈曲时,Metafluid转变为非牛顿剪切稀化流体。
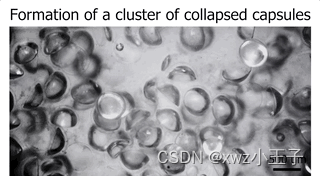
胶囊屈曲后形成聚集体
这种转变归因于胶囊屈曲后形成的聚集体,这些聚集体在高剪切率下会逐渐破裂。研究人员表示接下来还计划探索这种Metafluid的声学和热力学属性:
这种可扩展、易于生产的Metafluid的应用空间是巨大的。
我们的探索还停留在表面。
-
相关阅读:
Numpy 的 random 函数总结
第二章 cadence后仿教程(Physical Verification).pdf
【Java设计模式 常用编程设计原则】KISS、YAGNI和DRY原则
ON/安森美ISL9R3060G2车规FRD,原厂渠道ASEMI代理
8月23号面试
清晰梳理最全日志框架关系与日志配置-SpringBoot 2.7.2 实战基础
【Azure 应用服务】NodeJS Express + MSAL 应用实现AAD集成登录并部署在App Service Linux环境中的实现步骤
深入浅出计算机组成原理03-通过你的CPU主频,我们来谈谈“性能”究竟是什么?
小红书 x Hugging Face 邀请你一起晒「创意新春照」
第26期 | GPTSecurity周报
- 原文地址:https://blog.csdn.net/weixin_44887311/article/details/137905498