-
【MATLAB】兔子机器人总系统_动力学模型解读(及simulink中的simscape的各模块介绍)
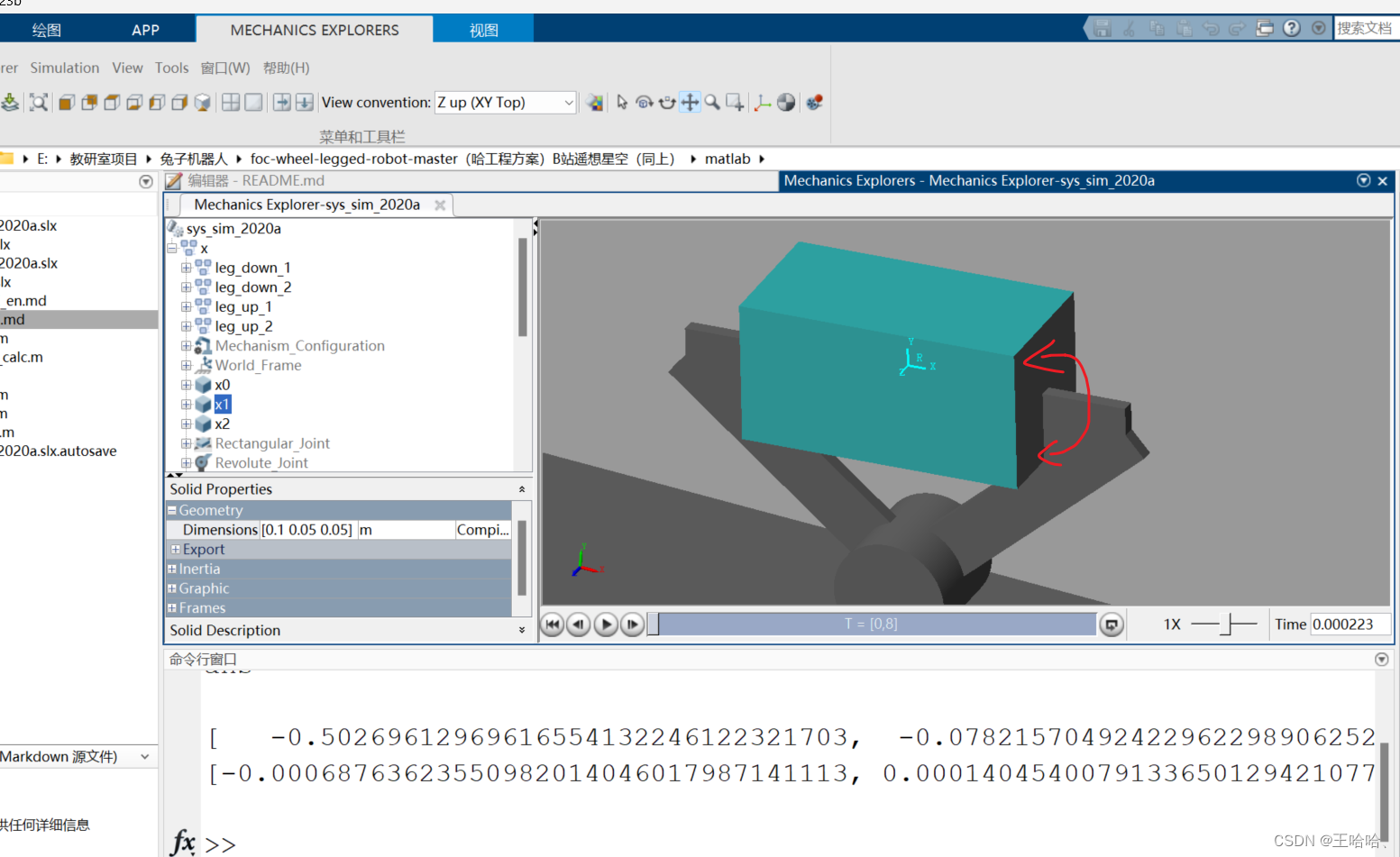
1、动力学模型
Rectangular Joint
控制平面上(x,y轴)的移动,去掉以后,机器人在原地翻滚不移动



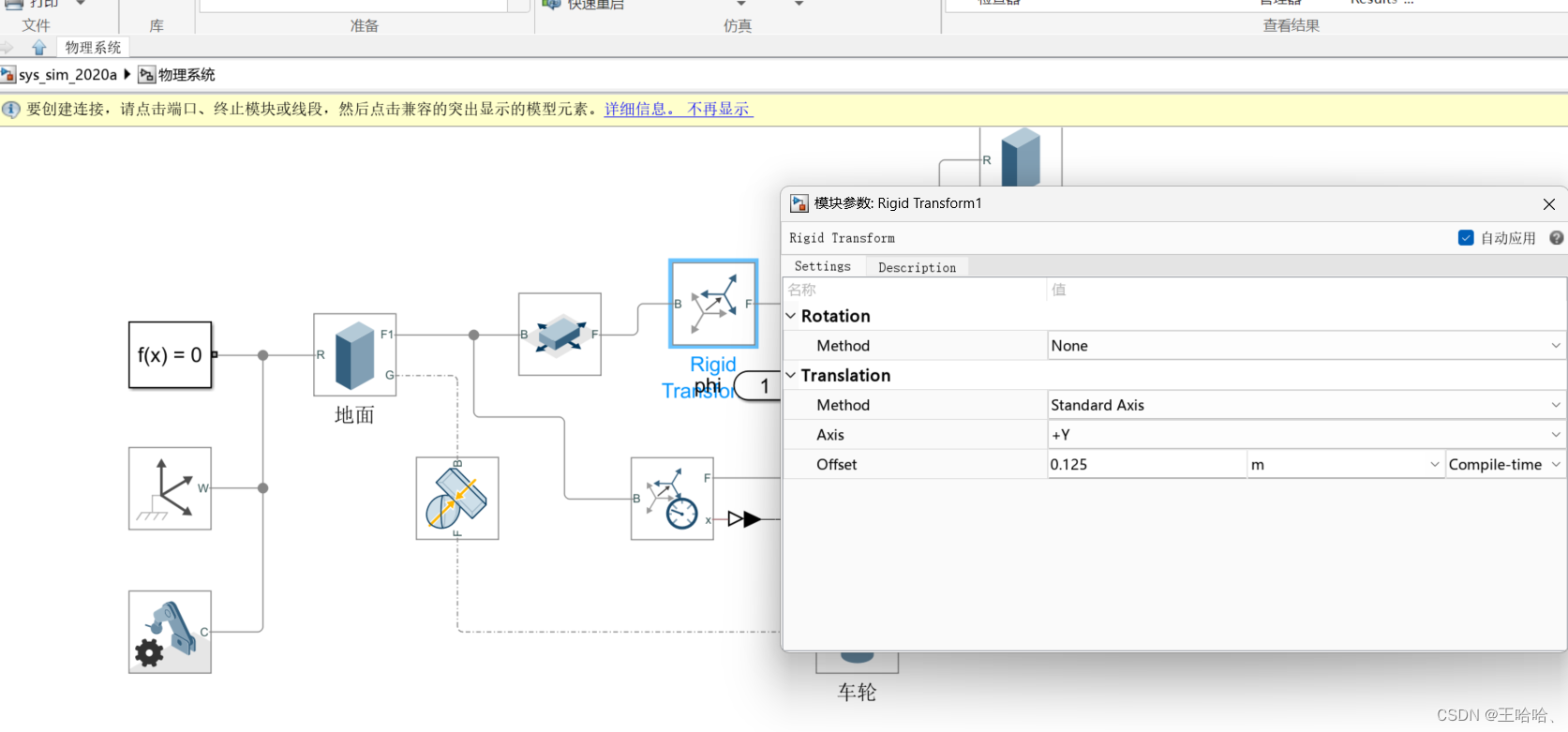
Rigid Transform
坐标转换,B站视频已收藏
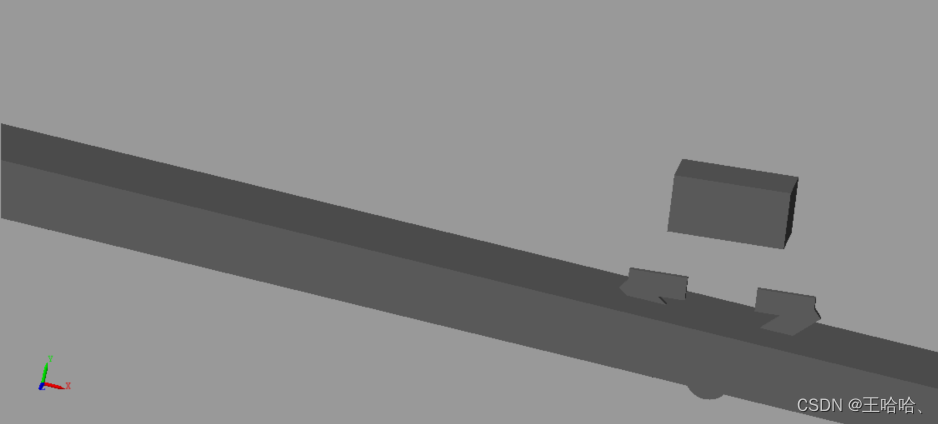
去掉,机体与地面贴合此处的作用是设定机体的初始高度

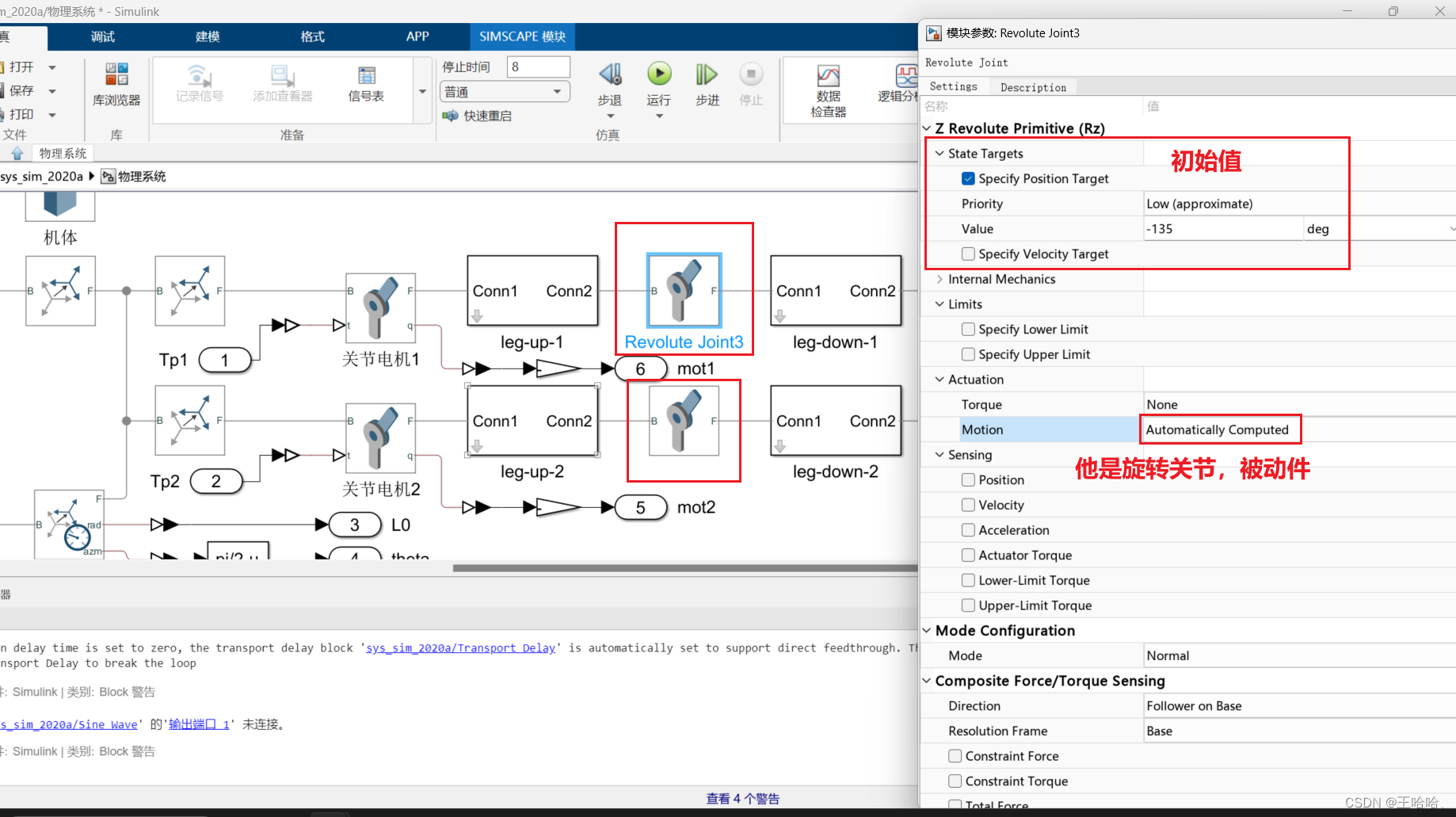
Revolute Joint
旋转关节,掌管旋转自由度


Rigid Transform 4
上下分离
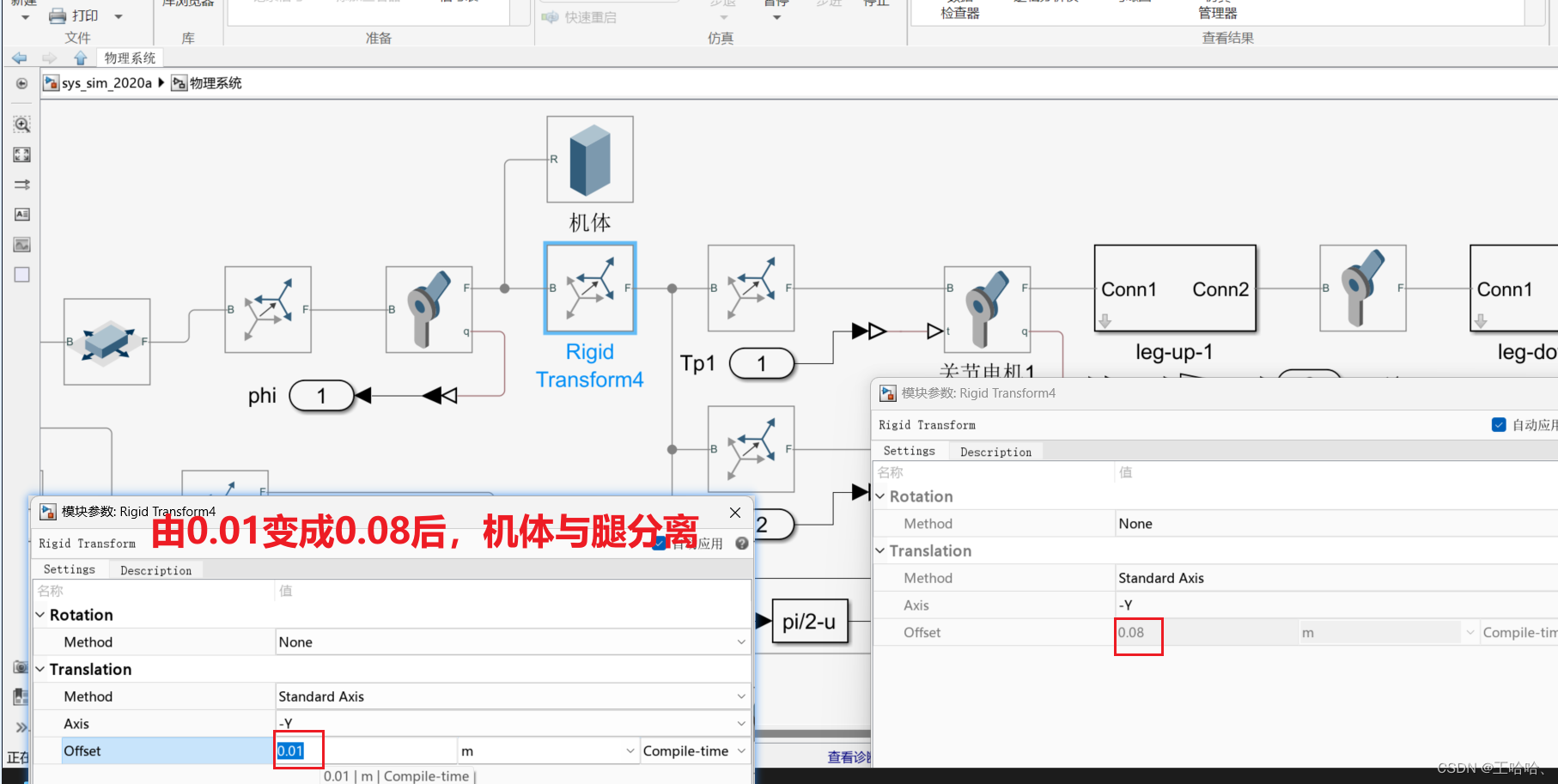
Rigid Transform2
机体与腿部分离,不然腿部就与机体中心重合了。



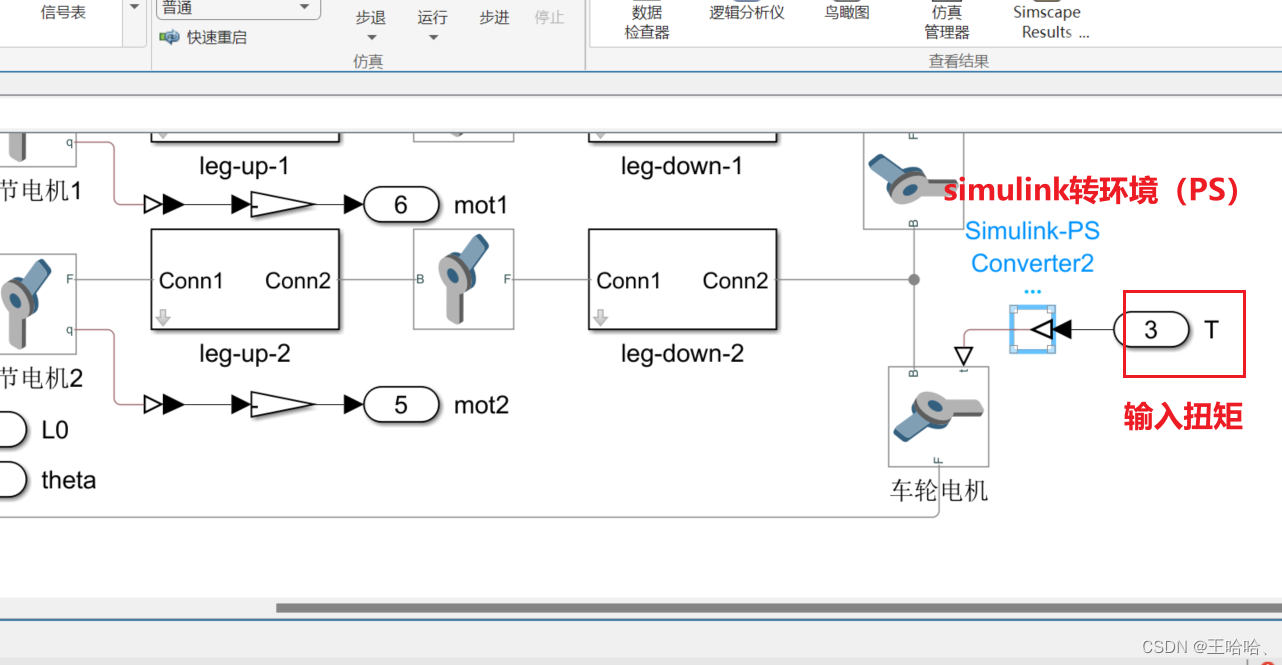
Simulink-PS Converter
将simulink信号转化为真实物理环境信号,实现从虚到实

Inport
输入端口
关节电机

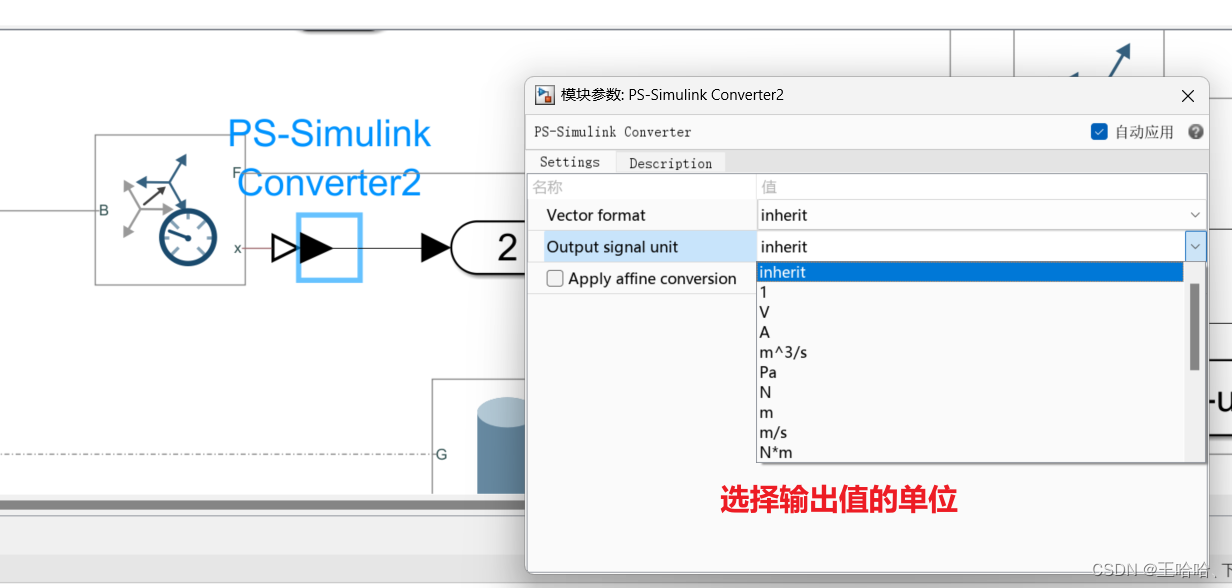
PS-Simulink Converter
将环境变量转换成simulink变量
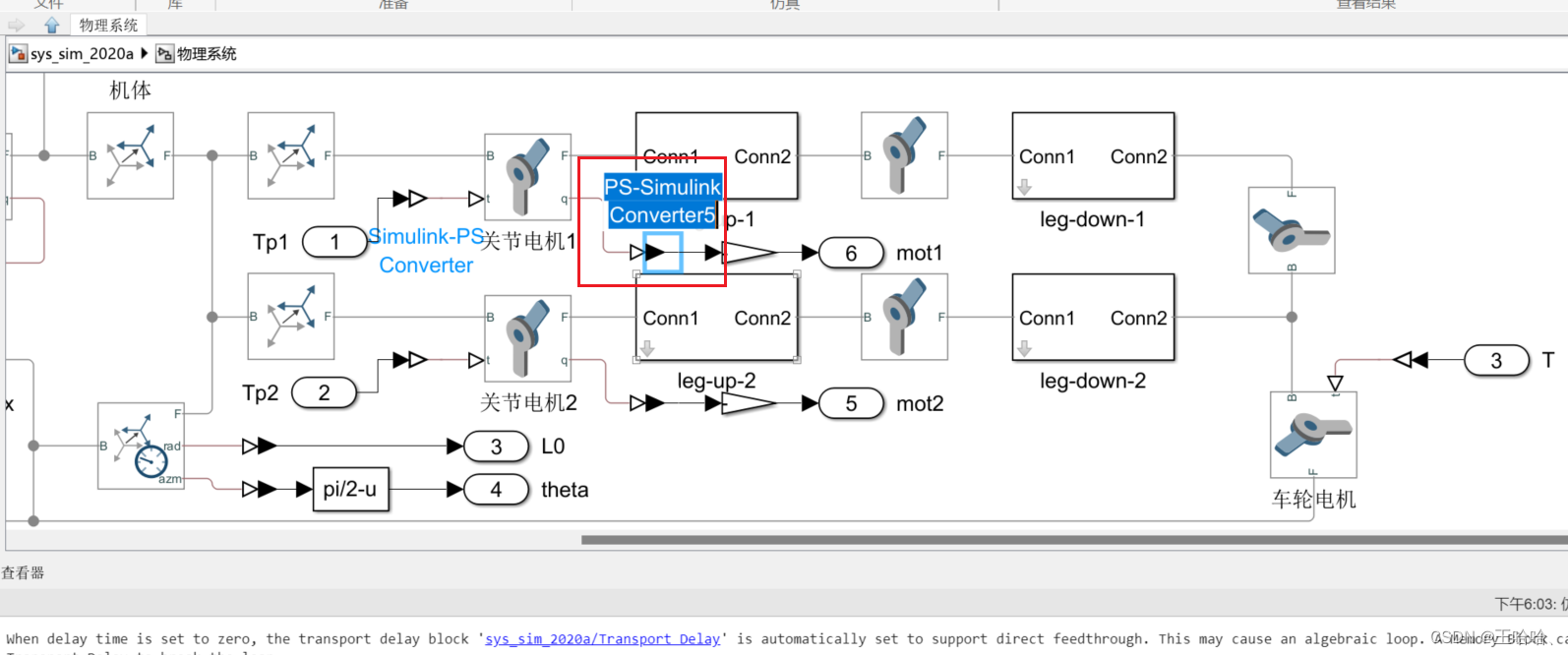
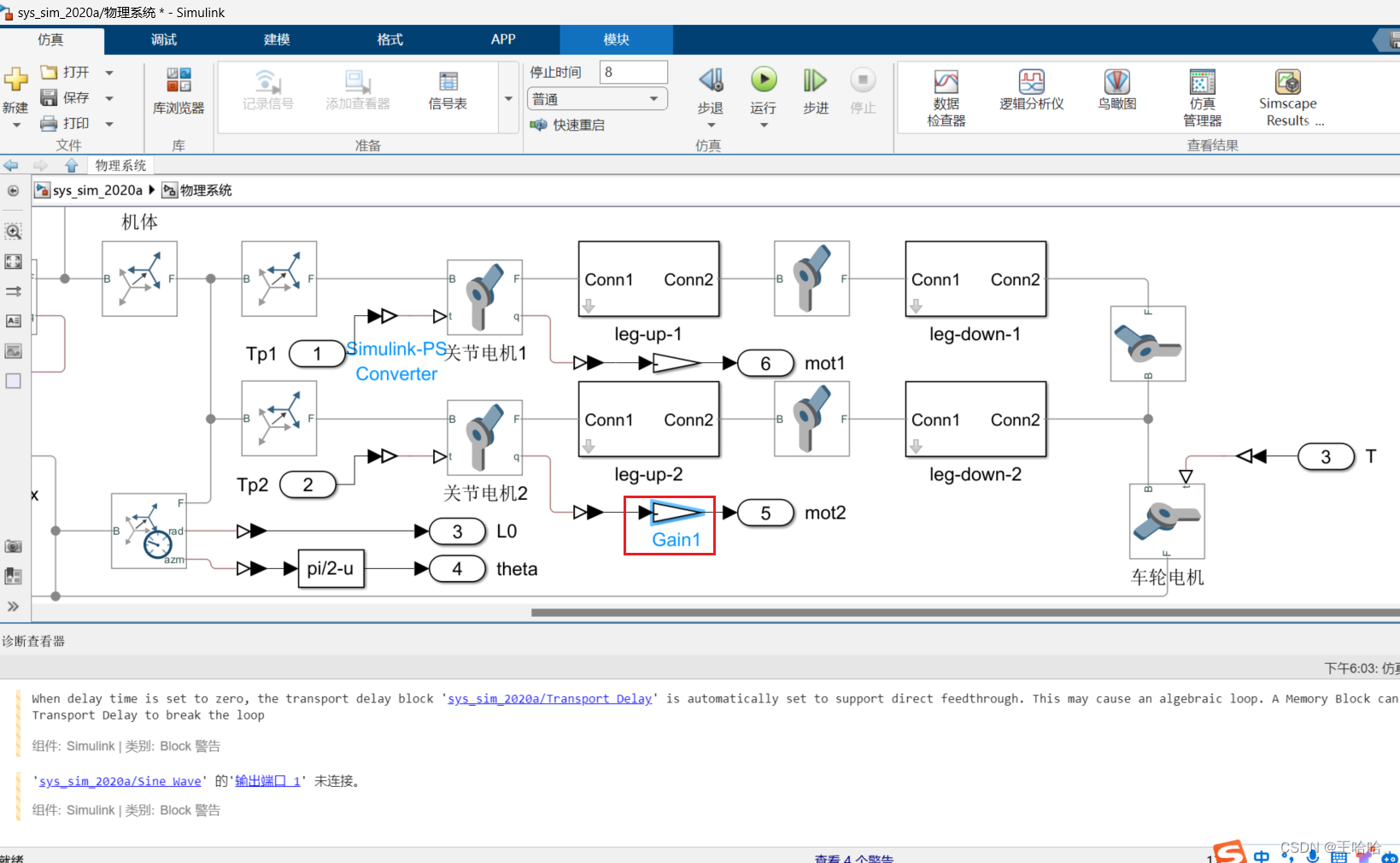
Gain
就是比例系数

outport
将关节电机的转动角度读取出来

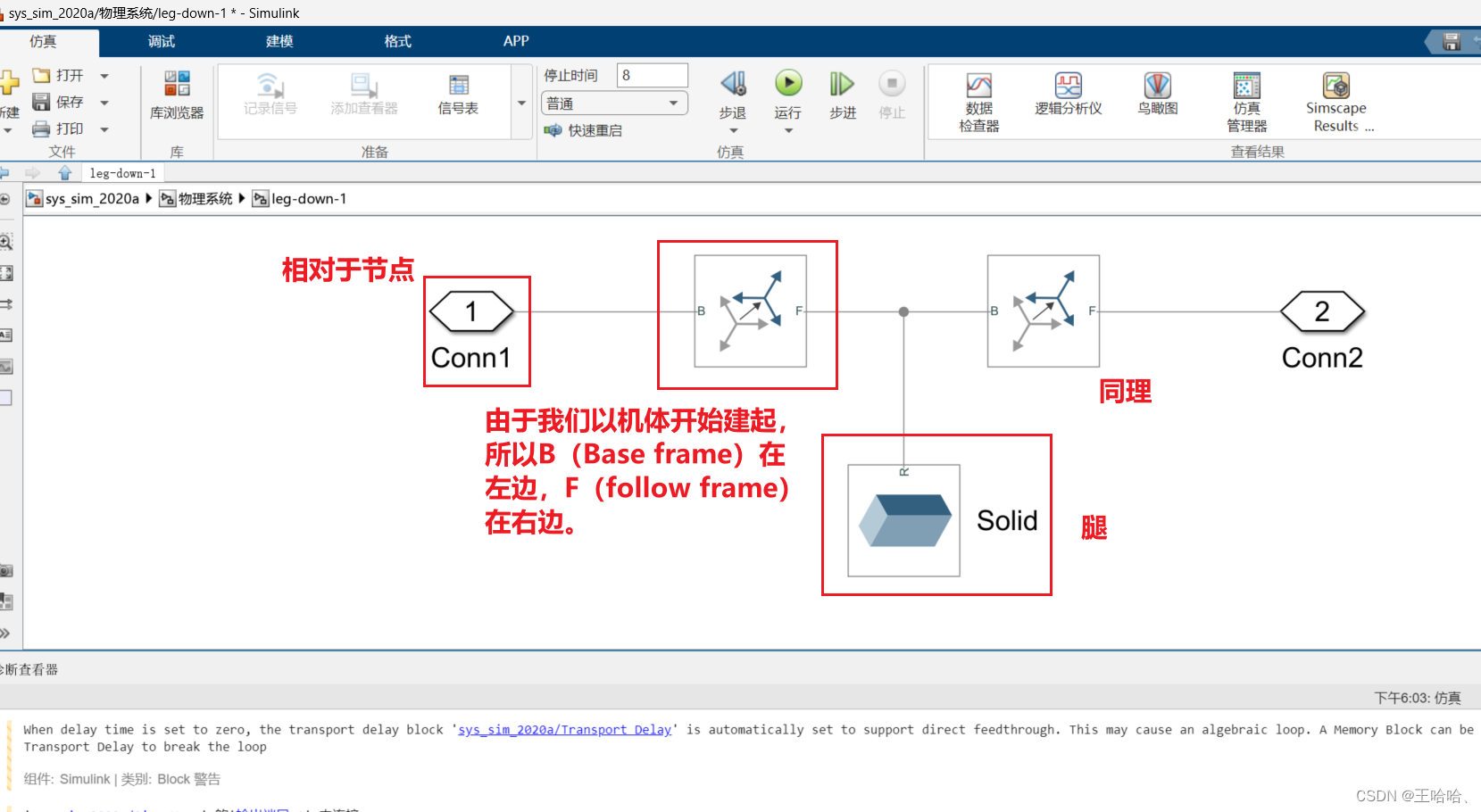
腿部
点击左下角箭头进行展开

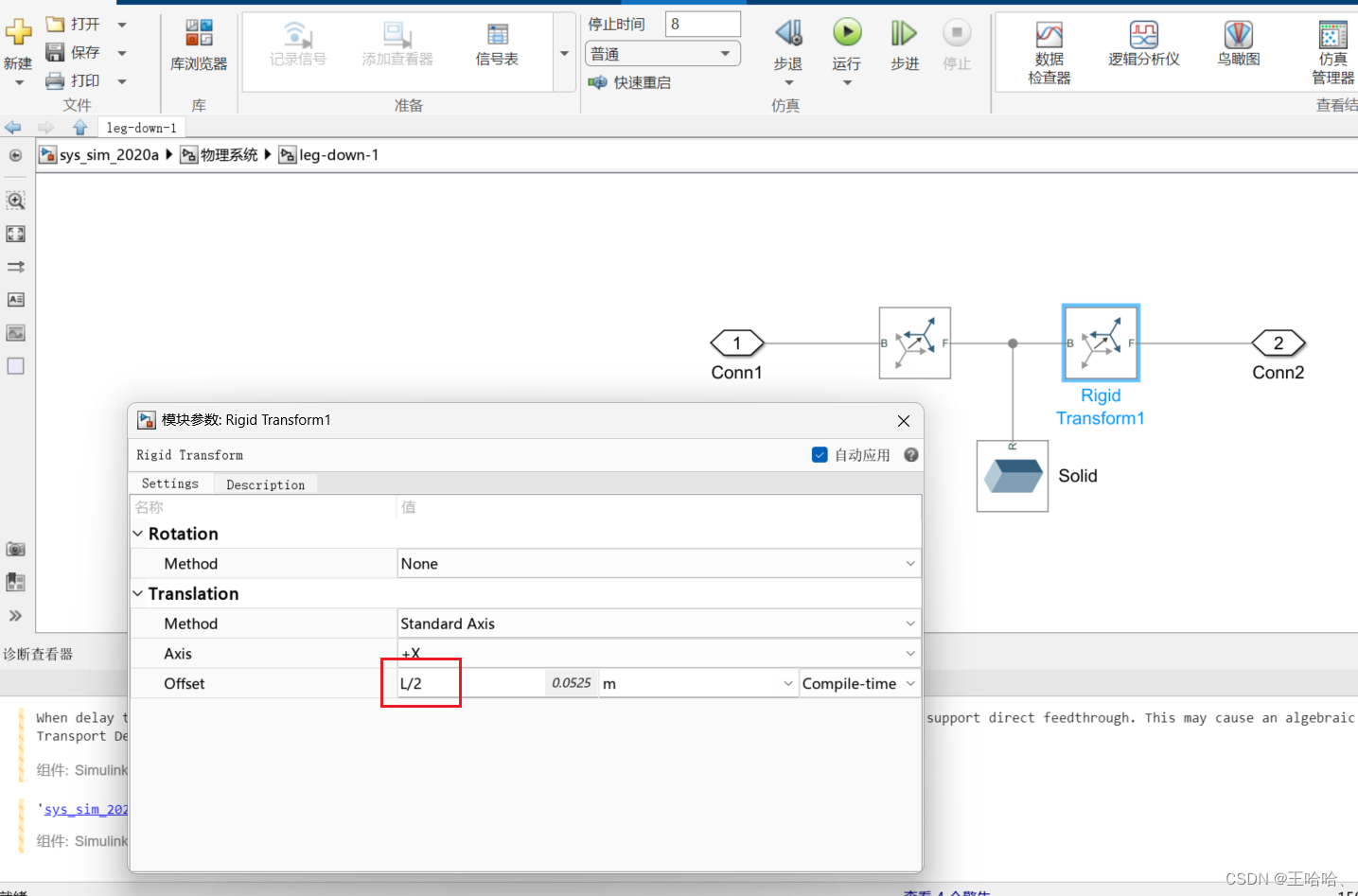
改变腿的尺寸等物理性质

采用变量更有灵活性,L为杆长

输入扭矩
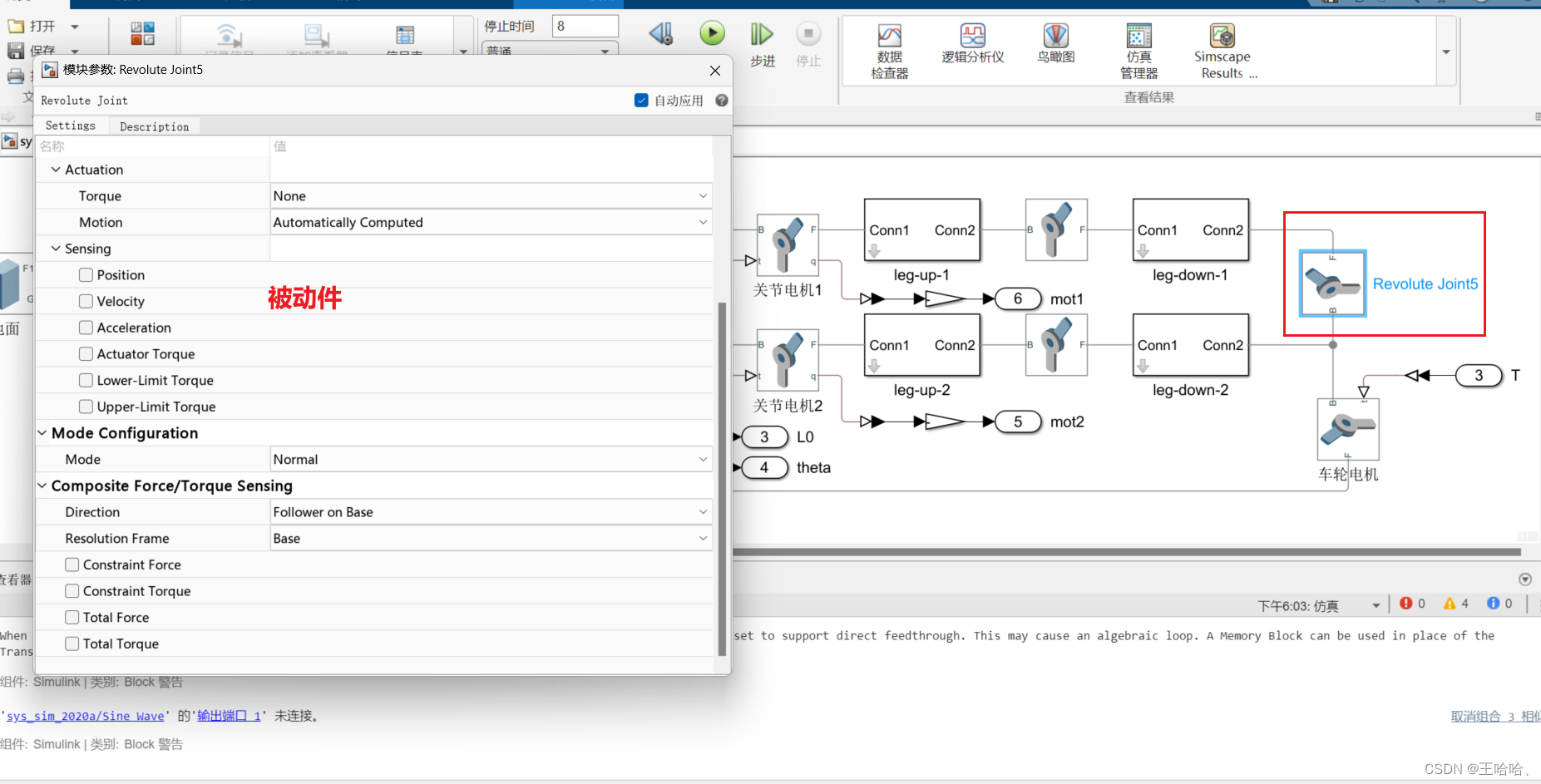
车轮电机

电机带动车轮转动

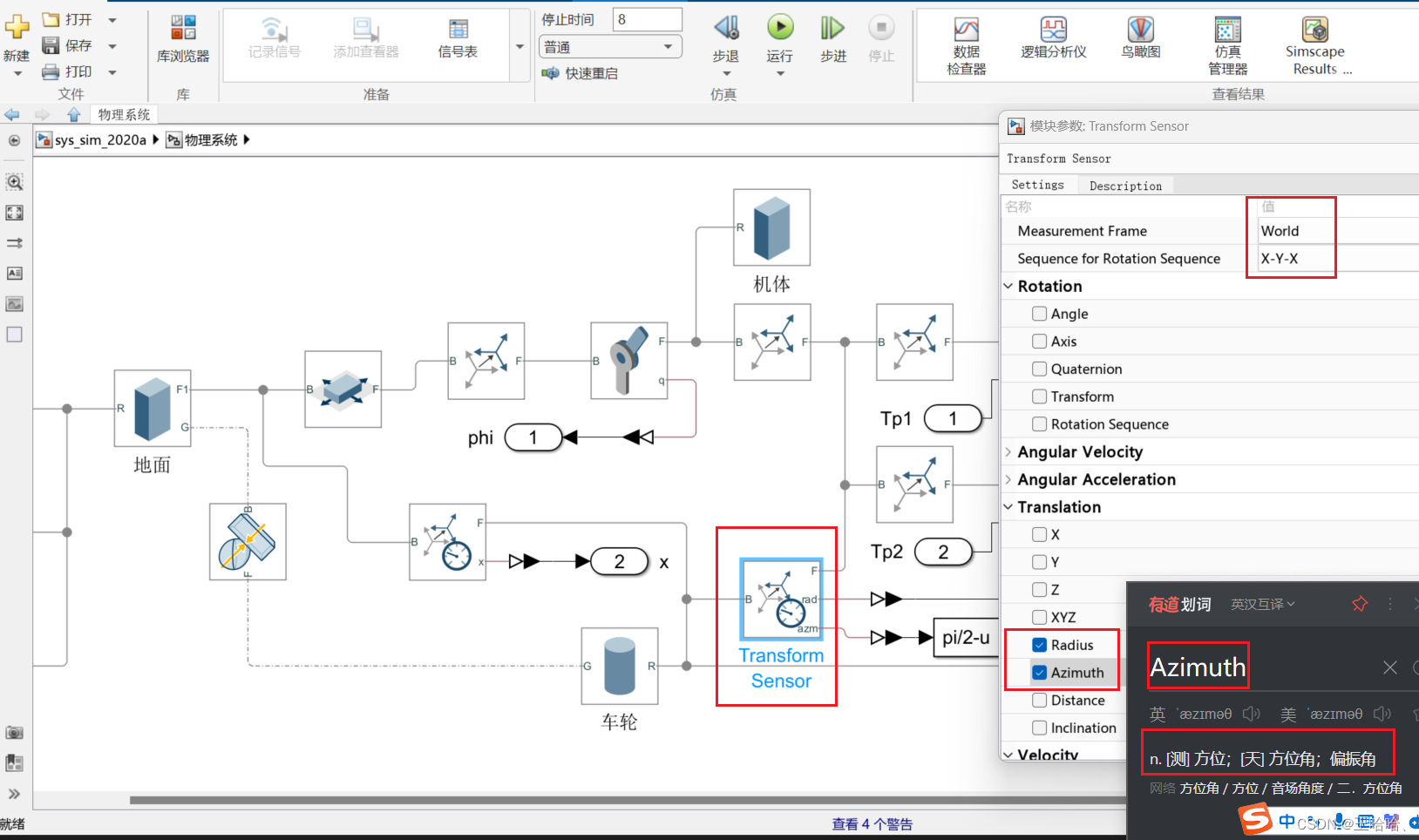
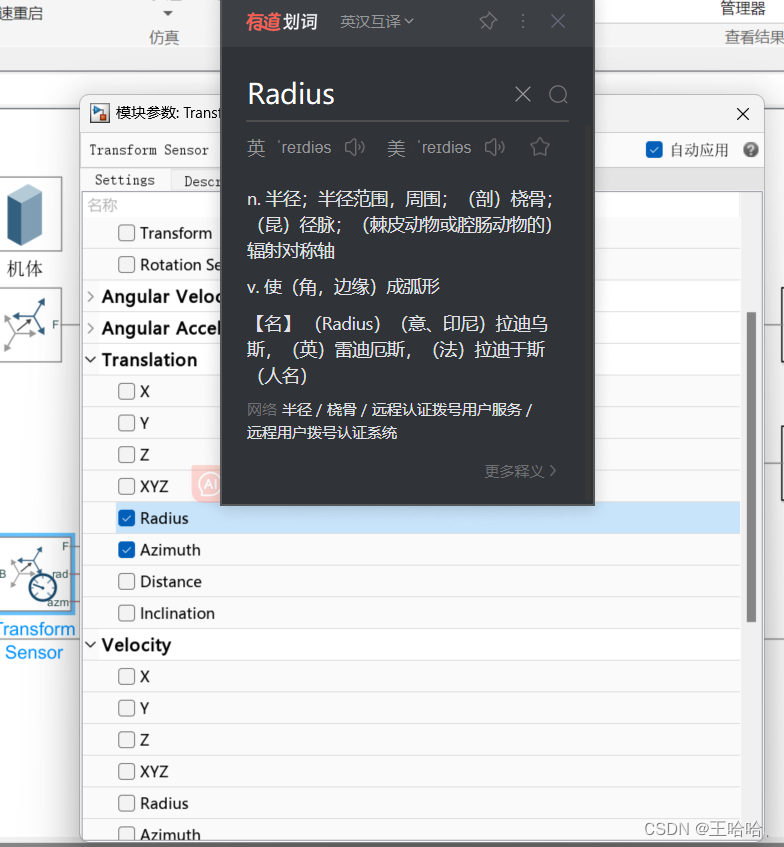
Transform Sensor1
translation 翻译为:平移
http://t.csdnimg.cn/M9o4S
Transform Sensor2



L0代表车轮旋转角度
(纠正!!theta是腿部角度,并且此处的腿部是指虚拟腿即机体到车轮的连线)

但是为什么theta就能代表机体倾斜角呢?(纠正!!theta是腿部角度)


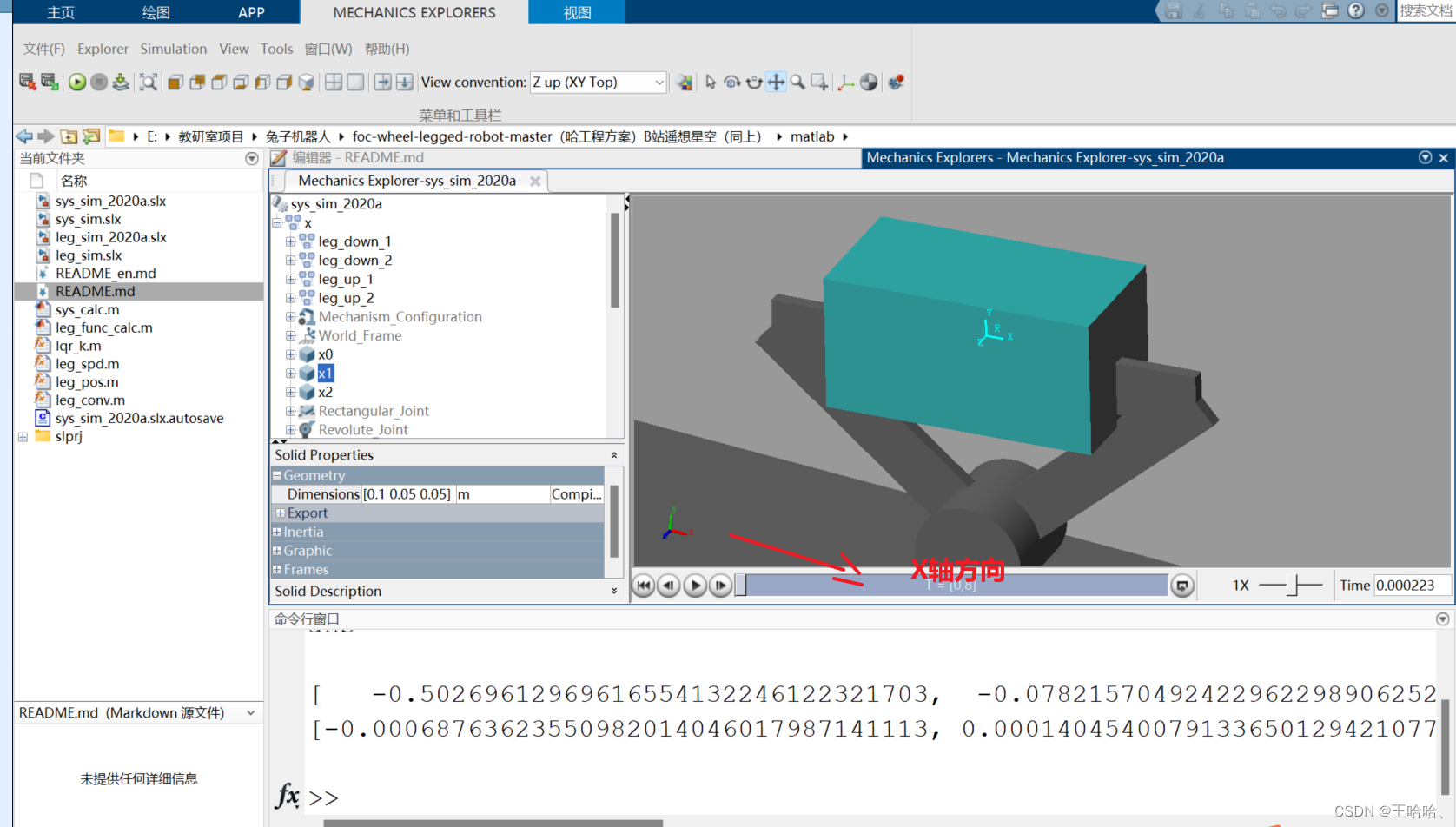
Solid Inertia
Simscape Multibody Solid和Rigid Transform模块说明 说明 - 韩冰的文章 - 知乎
https://zhuanlan.zhihu.com/p/87595587

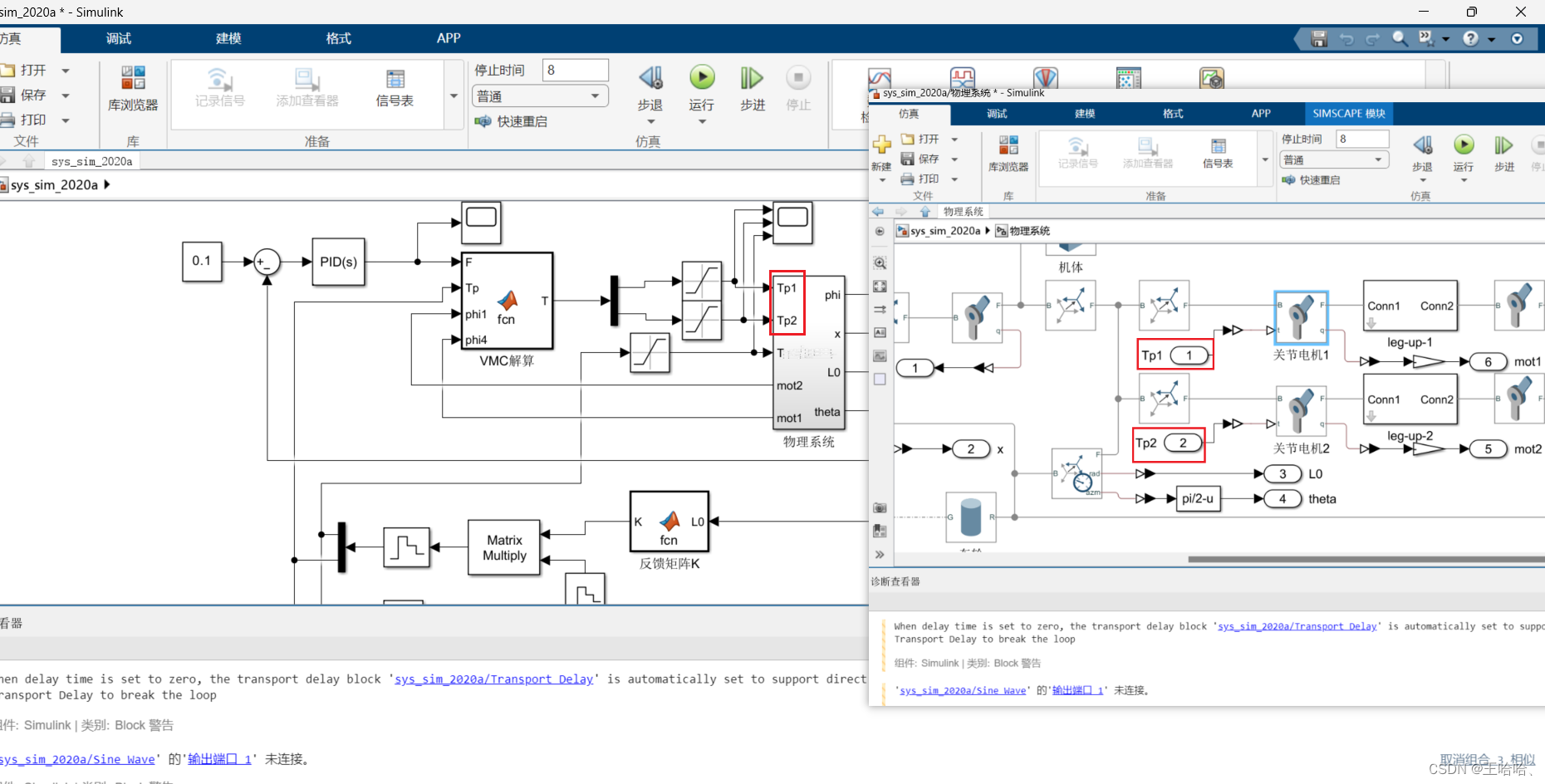
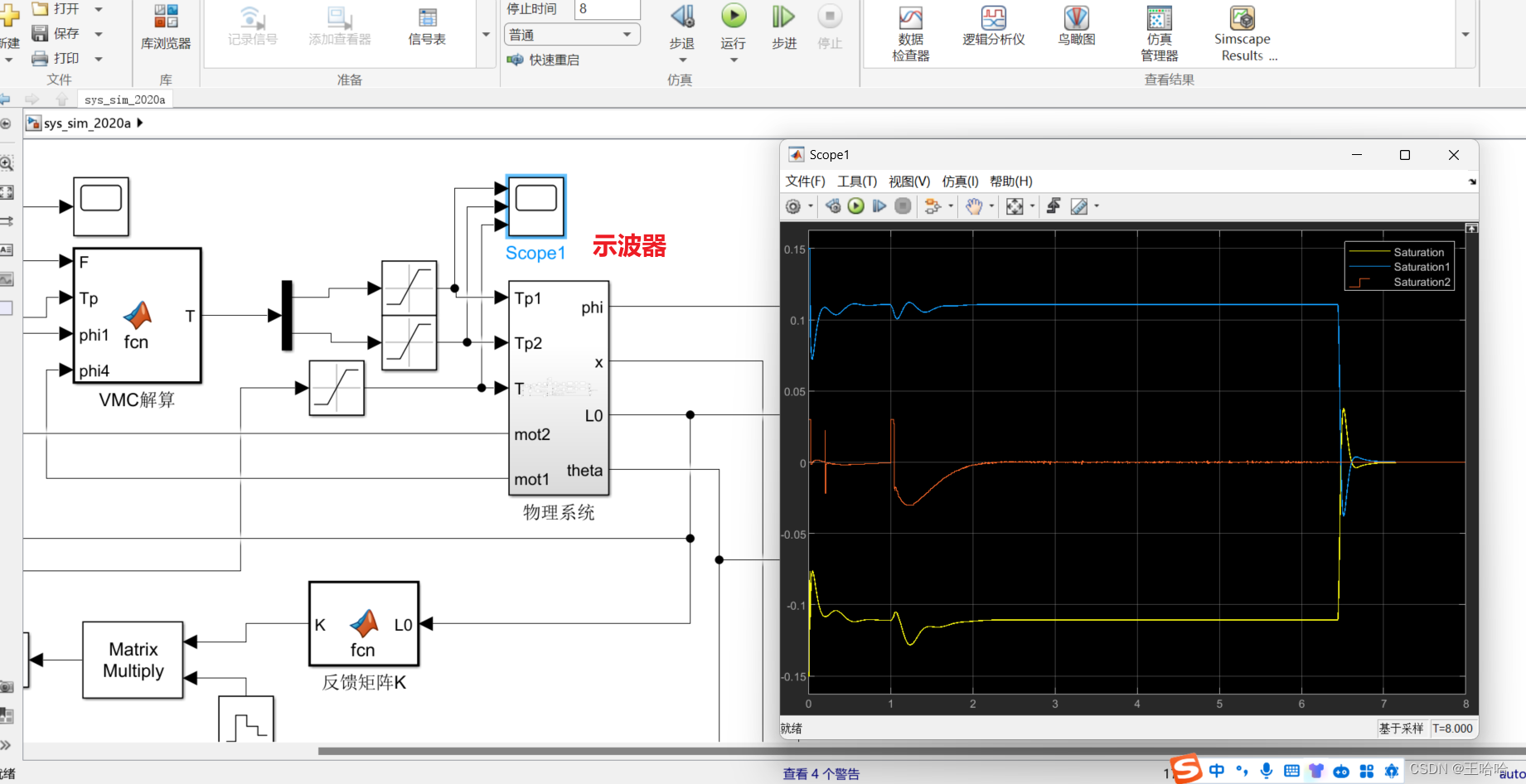
2、总系统
动力学系统引脚定义

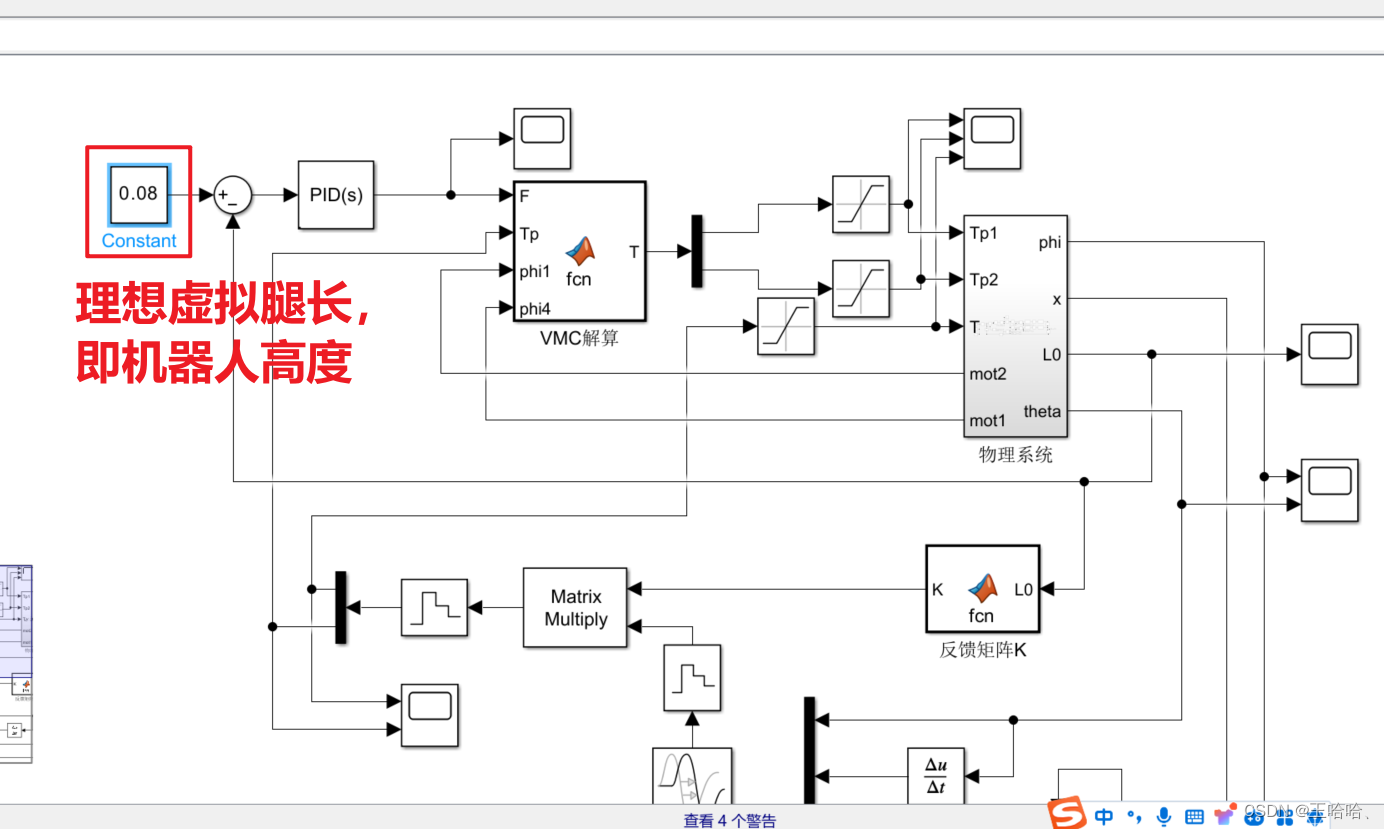
输入参数
机器人行驶速度
机器人身高
机器人变矮了

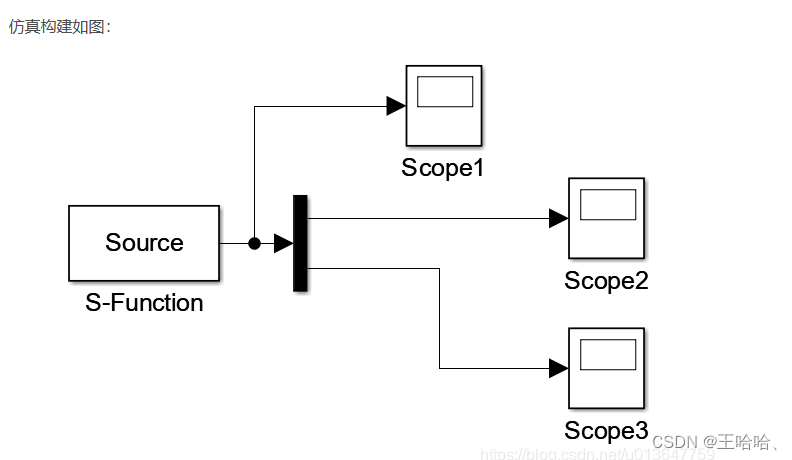
scope示波器
通过示波器可以看到各值的输出(无单位),来分析运动特性
theta是腿部角度,并且此处的腿部是指虚拟腿即机体到车轮的连线
纠正:L0代表腿长,并且此处的腿部是指虚拟腿即机体到车轮的连线
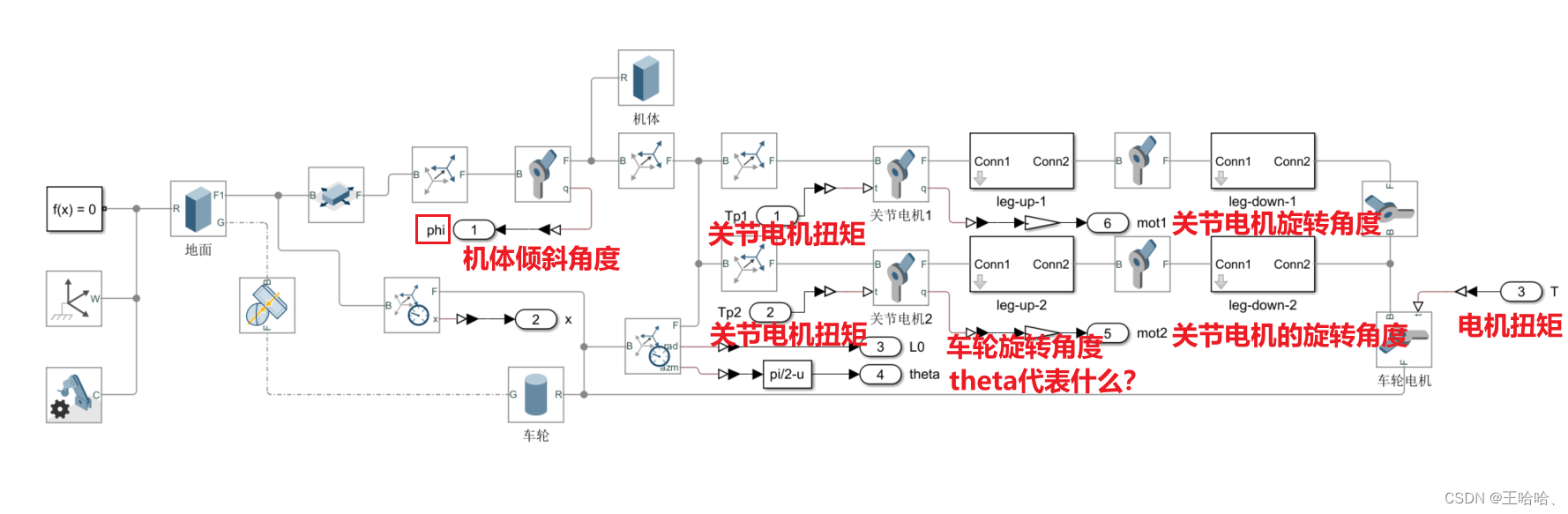
应该是指旋转半径,指虚拟腿长(圆心为车轮中心)
Demux与Mux
http://t.csdnimg.cn/bVxkf





Saturation
Saturation模块-每天一个MATLAB小技巧(13) - 一本正经胡说八道的文章 - 知乎
https://zhuanlan.zhihu.com/p/512419214我们在Simulink中常用的一个模块是Saturation模块,这是一个将输入信号限制在饱和上限和下限之间的模块。

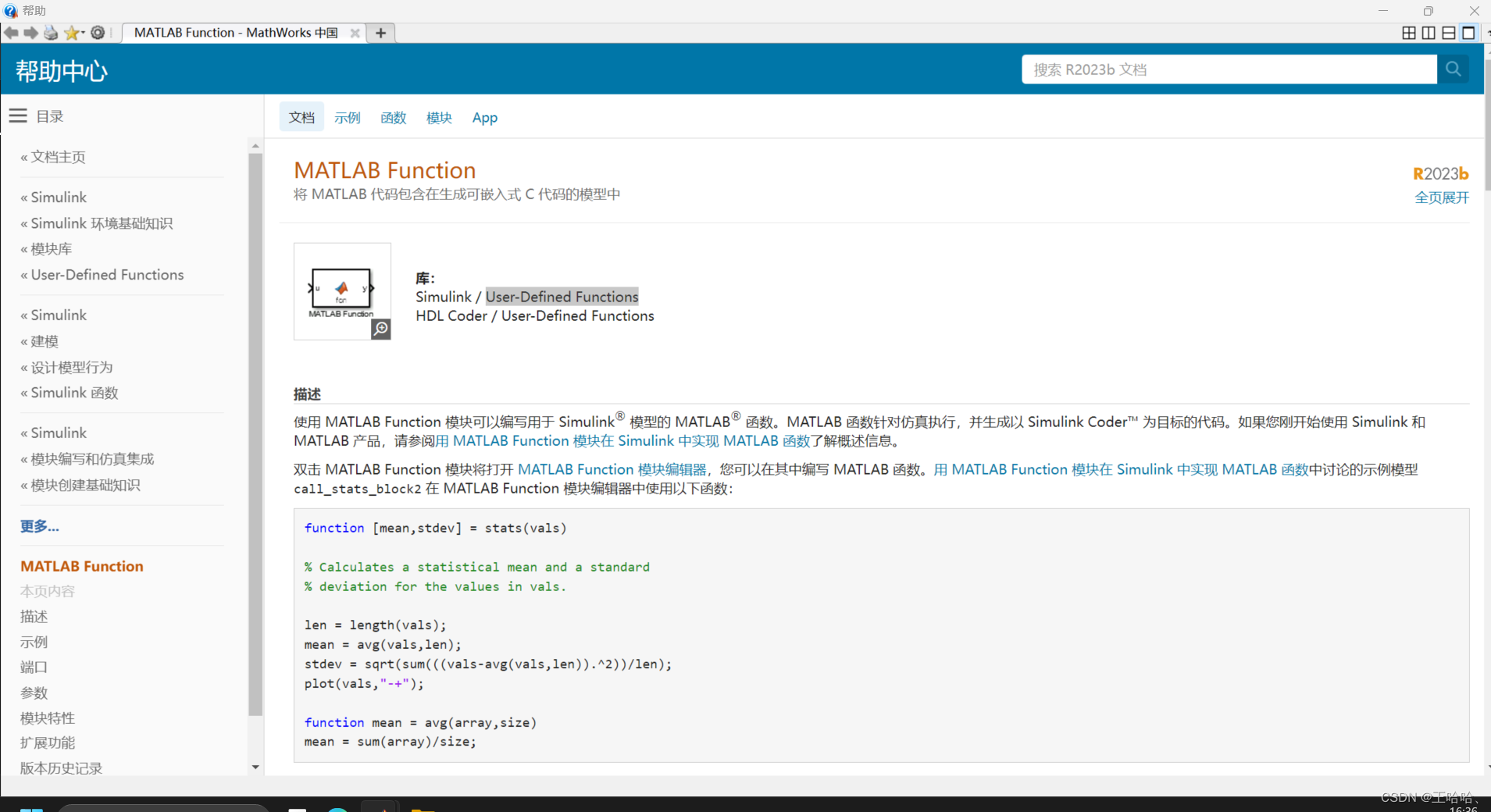
MATLAB Function
具体使用,可以在MATLAB输入doc,搜索

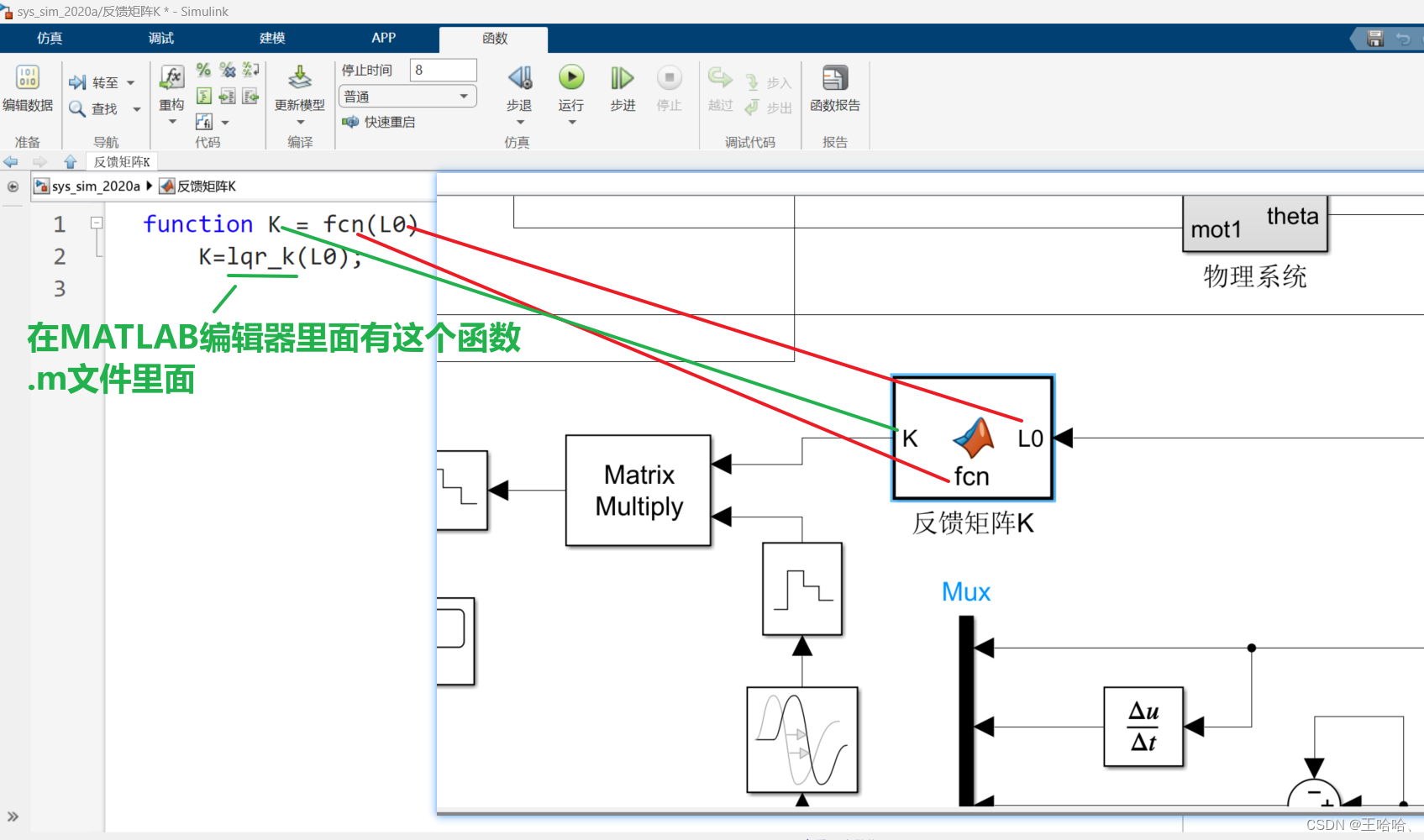

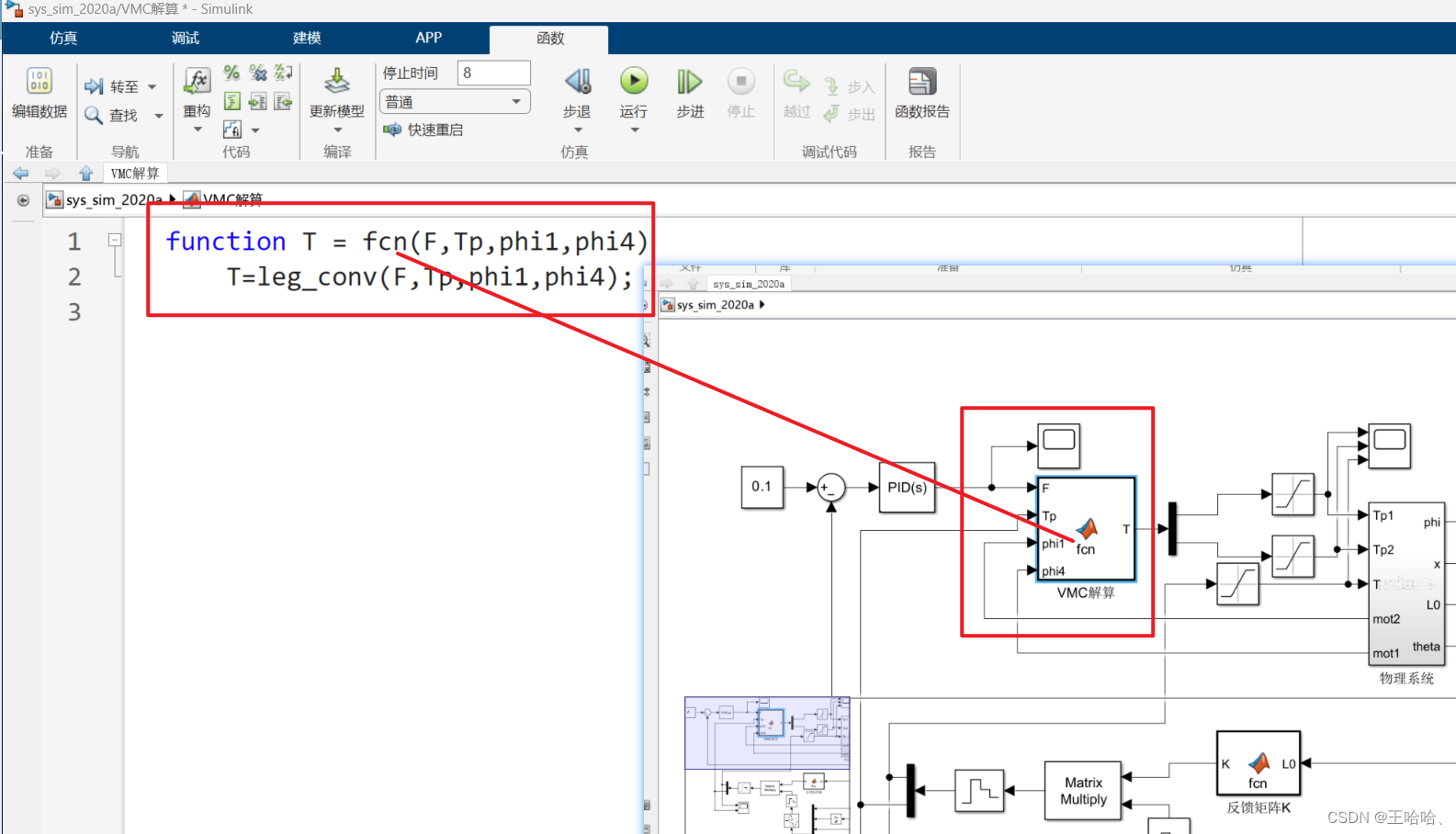
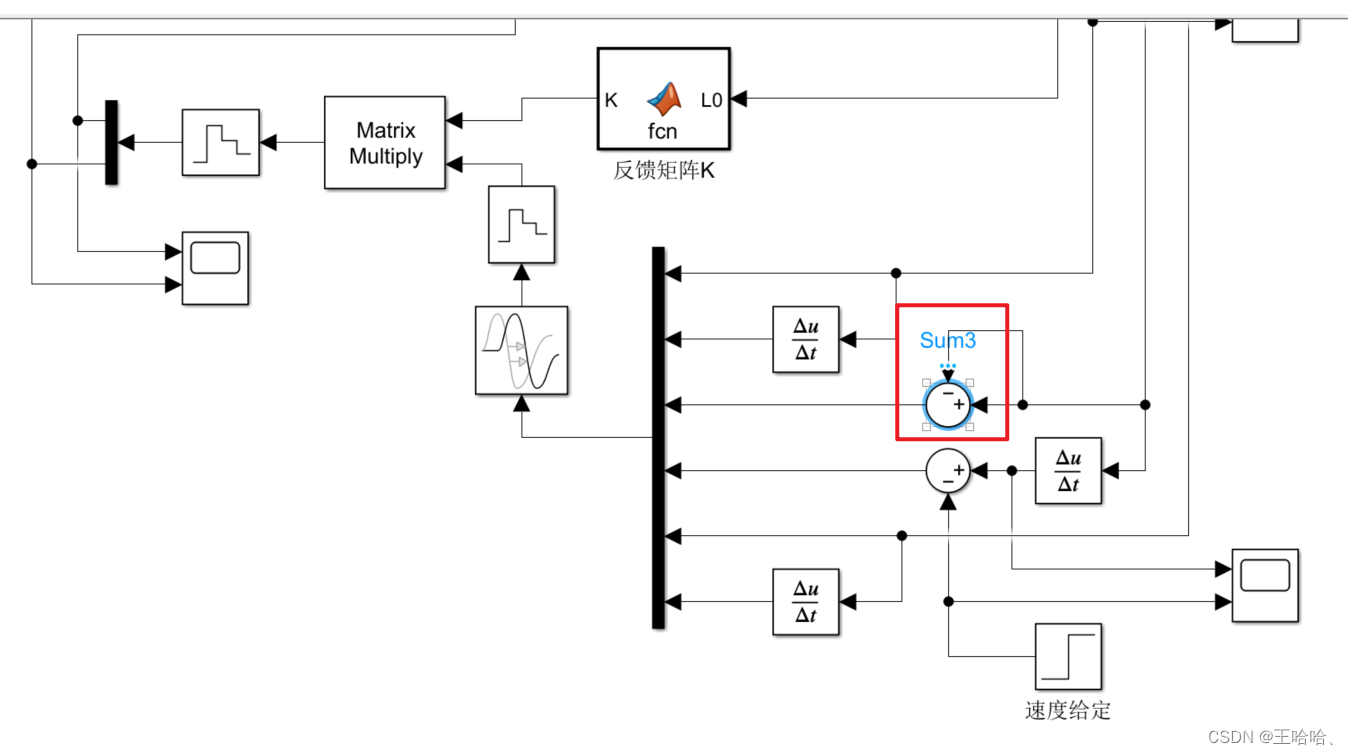
VMC解算同理
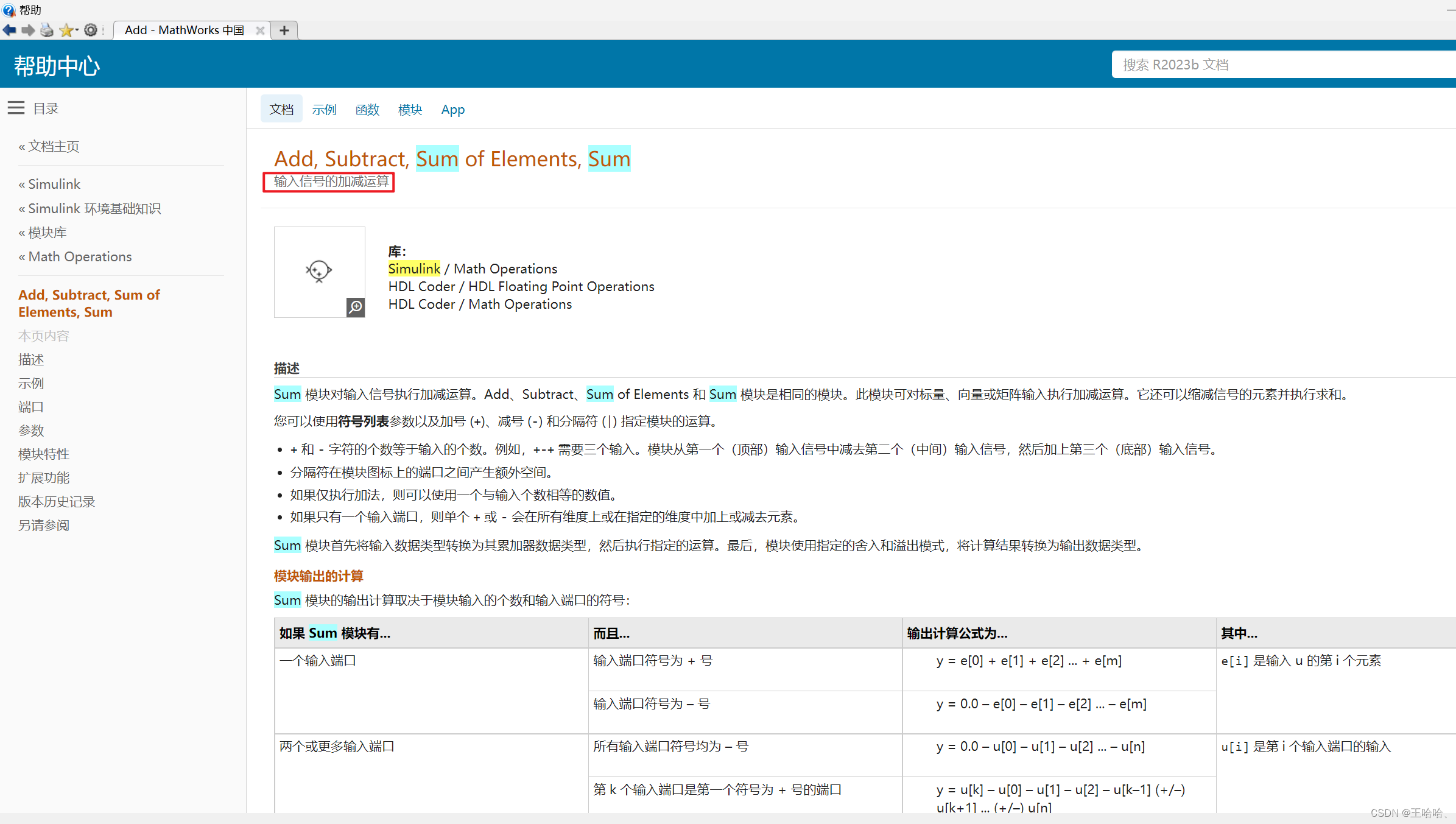
Sum
Derivative
求导

它是用定义法求导,所以才叫逼近



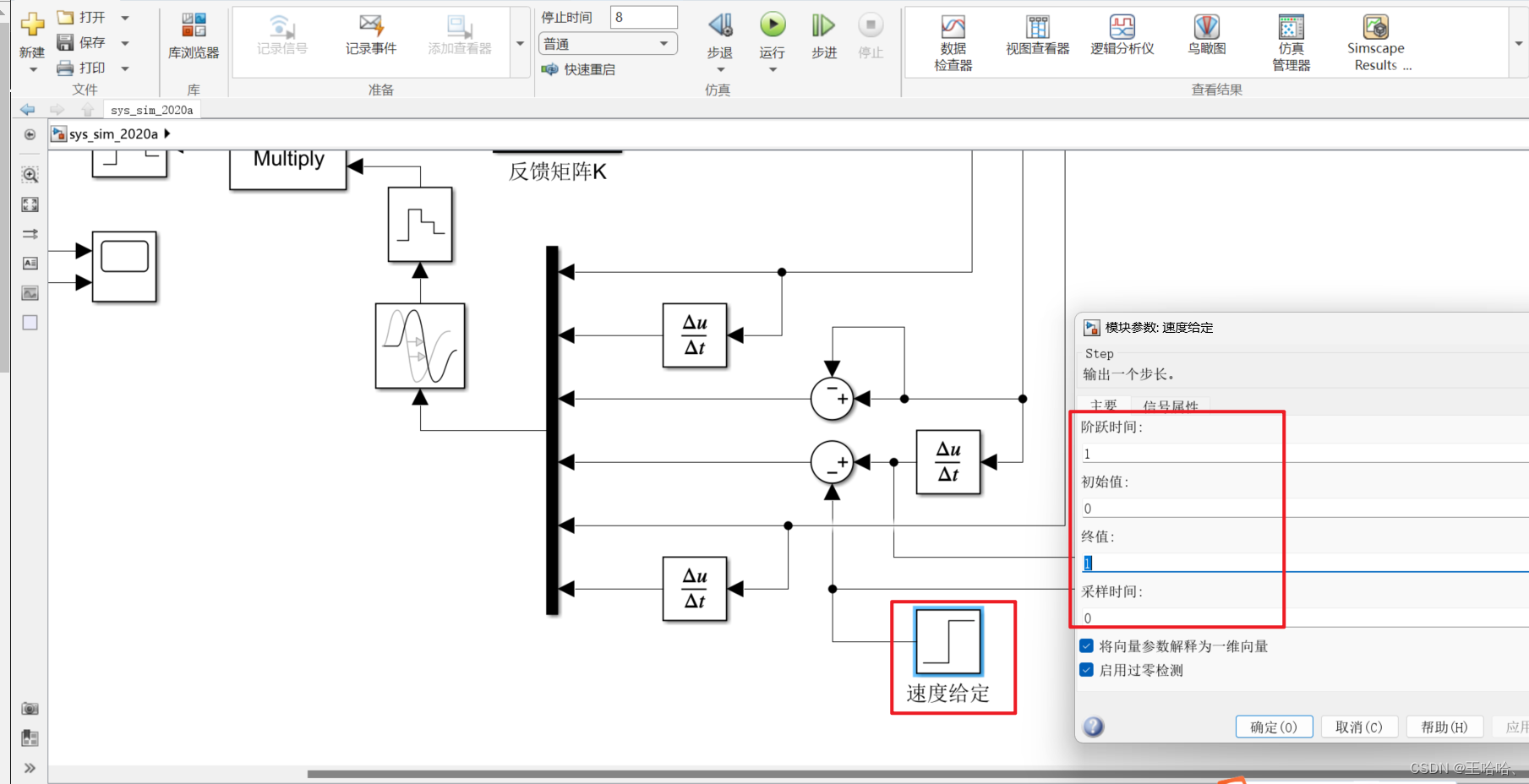
Step

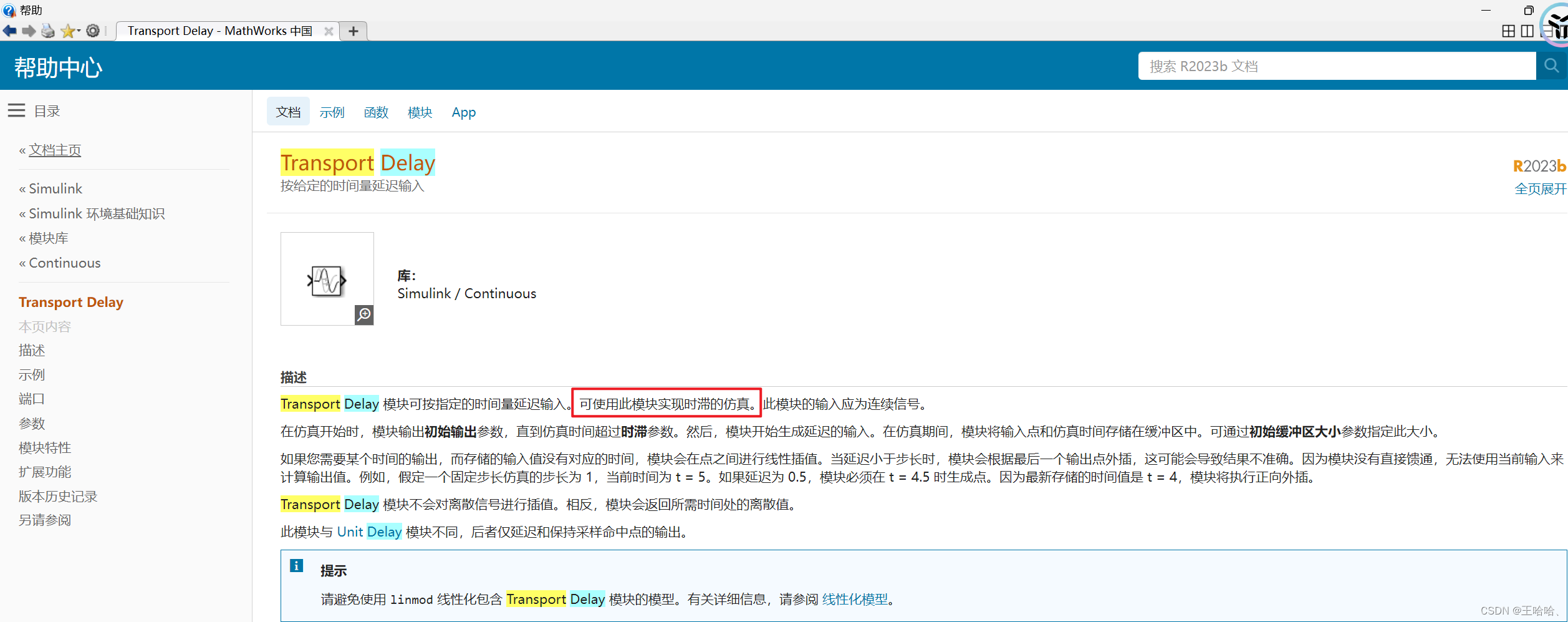
Transport Delay


Zero-Order Hold
将具有连续采样时间的输入信号转换为具有离散采样时间的输出信号。


Matrix Multiply
矩阵相乘


Sum—实际与理想腿长之差

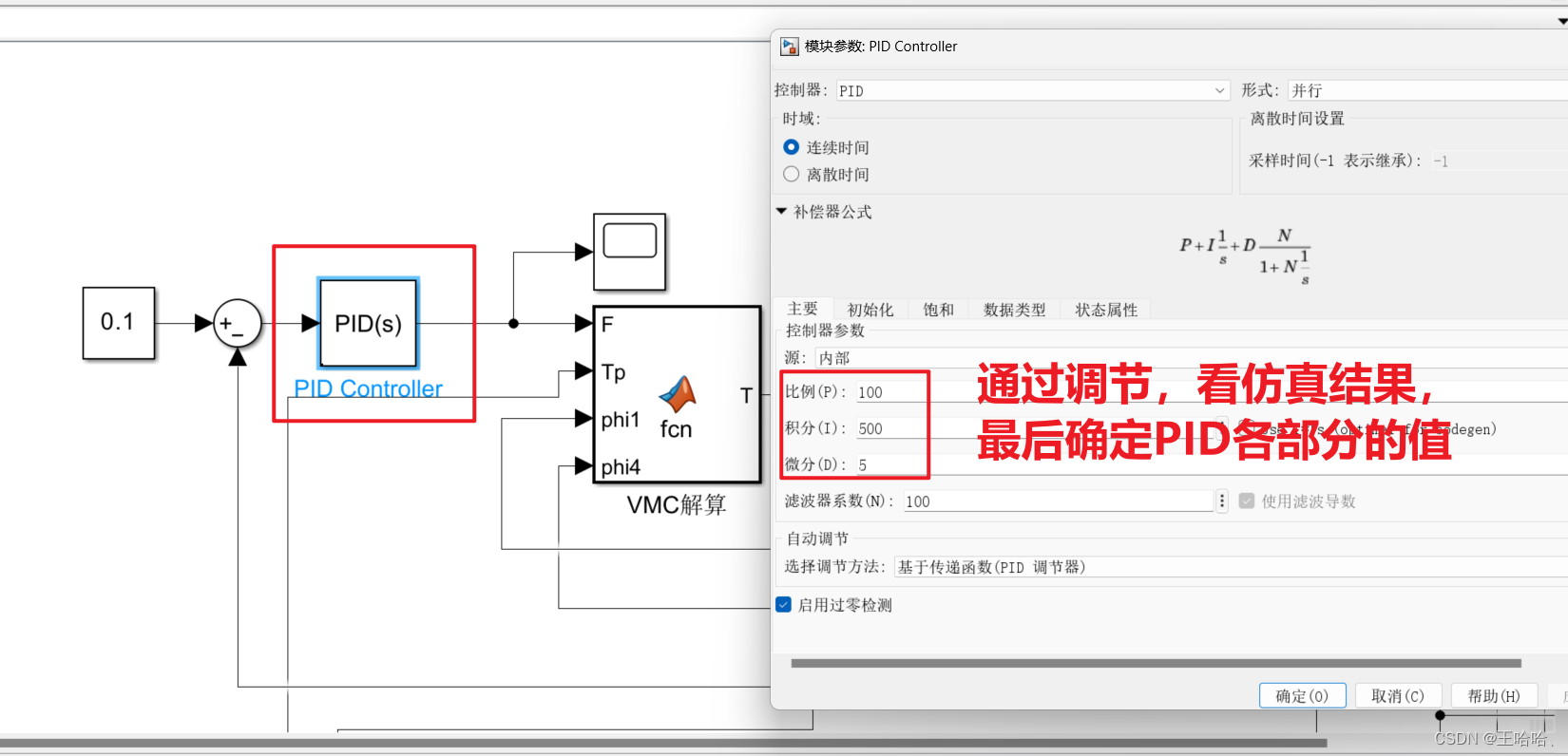
PID Controller
10:20开始看起
【【自动控制原理】12_PID控制器_Matlab/Simulink仿真【开场三分钟闲话】】 【精准空降到 10:20】 https://www.bilibili.com/video/BV1xQ4y1T7yv/?share_source=copy_web&vd_source=77e36f24add8dc77c362748ffb980148&t=620



-
相关阅读:
大事务问题到底要如何解决?
页面静态化、Freemarker入门
手机安装Kali Linux
第5章:程序控制结构
短视频如何用标题吸引人?分享七种标题类型,引起兴趣很关键
Android音视频开发-AudioTrack
深入理解JVM虚拟机第十九篇:JVM字节码中方法内部的结构和与局部变量表中变量槽的介绍
C++面试经典100问
[补题记录] Atcoder Beginner Contest 299(E)
Set接口的实现类---HashSet
- 原文地址:https://blog.csdn.net/m0_48808835/article/details/136352074