-
旭日x3派与STM32串口通信
应用场景
视觉小车:
旭日x3派专注于视觉任务,可以部署yolo系列算法,小车底盘的PID控制可以放在STM32上进行,通过串口x3派可以接收stm32上传的速度信息、位姿信息等,也可以下发速度、转向等控制来控制小车运动轨迹。准备
硬件:
旭日x3派
type-c供电线
16GB以上SD卡
0.96寸oled液晶屏
STM32f103c8t6
ST-Link/J-Link烧录器
软件:
x3派烧录ubantu20.04桌面版的镜像
江协科技stm32例程
x3派最好先进行串口的回环测试:https://developer.horizon.cc/documents_rdk/python_development/40pin_user_guide/uart

代码
x3派:
①接收#!/usr/bin/env python3 import sys import signal import os import time # 瀵煎叆python涓插彛搴? import serial import serial.tools.list_ports def serialTest(): print("List of enabled UART:") os.system('ls /dev/tty[a-zA-Z]*') try: ser = serial.Serial("/dev/ttyS3", int(9600), timeout=1) # 1s timeout except Exception as e: print("!\n") return 1 print(ser) try: while True: # Read data from STM32 received_data = ser.readline().decode('ascii').strip() if received_data: print("接收到的数据 ",received_data ) time.sleep(1) except KeyboardInterrupt: pass finally: ser.close() return 0 if __name__ == '__main__': if serialTest() != 0: print("!") else: print("!")- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
②发送
#!/usr/bin/env python3 import sys import os import time import serial import serial.tools.list_ports class SerialSender: def __init__(self, port, baudrate=9600): self.ser = serial.Serial(port, baudrate) def send_data(self, data): try: # 将数据转换为十六进制字符串并发送 hex_data = ' '.join(format(val, '02X') for val in data) self.ser.write(bytes.fromhex(hex_data)) print(f"Sent data in hex: {hex_data}") except Exception as e: print(f"Error during sending data: {e}") def close_serial(self): self.ser.close() if __name__ == '__main__': # 请根据实际情况修改串口号 sender = SerialSender("/dev/ttyS3", 9600) try: # 示例数据,根据实际需求修改 data_to_send = [0x02] sender.send_data(data_to_send) except KeyboardInterrupt: pass finally: sender.close_serial()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
STM32:
接收和发送的代码直接使用江协科技的例程:
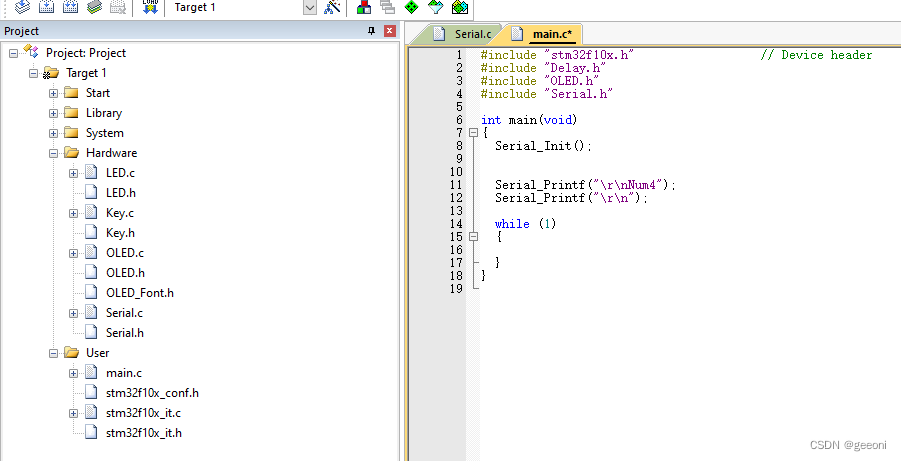
①发送:
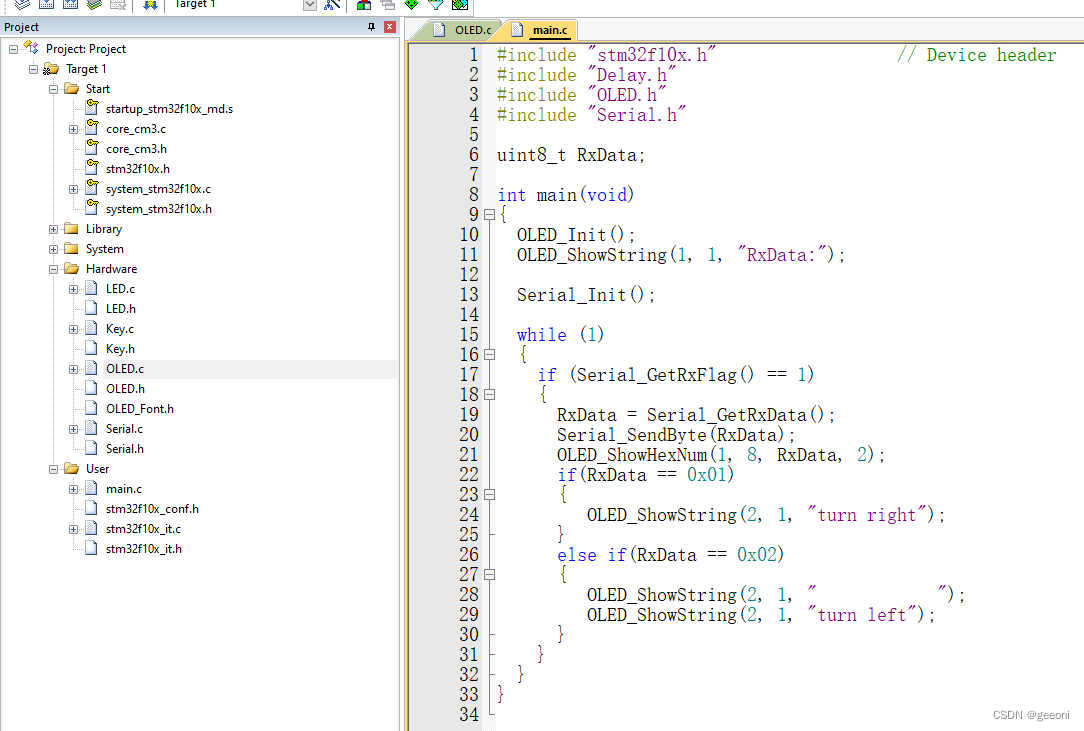
②接收:
效果
①stm32向x3派发送数据:

②x3派向STM32发送数据:

注意事项
①代码编写:不知道为什么不用记事本写就会报错,应该保存的文件格式需要是utf-8格式的。
②x3派发送数据时最好是16进制格式发送,不然容易数据紊乱和报错
③波特率都是9600 -
相关阅读:
Mq面试题
Kettle【实践 06】使用 HTTP client 获取 GPC 全球商品分类代码 JSON 数据处理入库全流程(云资源分享:ktr+数据.sql)
ajax同步与异步,json-serve的安装与使用,node.js的下载
4.k8s部署私人仓库并且部署java服务案例
全国批发市场情况萧条,进销存系统或是业务转机
【技术分享】RK356X Android 使用 libgpiod 测试gpio
c++中用opengl的gl函数在三维空间中绘制圆形和画球体
Linux 设置cd后自动ls、快捷键自动跳转指定目录或操作
dubbo(3): 启动时检查/超时/重试/幂等
几种“超强壮”的弱密码方案
- 原文地址:https://blog.csdn.net/m0_71523511/article/details/136428390