-
第二周opencv
一、边缘检测算子
边缘检测算子是用于检测图像中物体边界的工具。边缘通常表示图像中灰度值或颜色发生显著变化的地方。边缘检测有助于识别图像中的物体形状、轮廓和结构。这些算子通过分析图像的灰度或颜色梯度来确定图像中的边缘。
梯度算子
要得到一幅图像的梯度,则要求在图像的每个像素点位置处计算偏导数。 一阶微分算子能够检测图像中的亮度变化,因此在边缘位置通常有较大的梯度值。通过检测梯度的变化,可以找到图像中的边缘。
对应的卷积模板

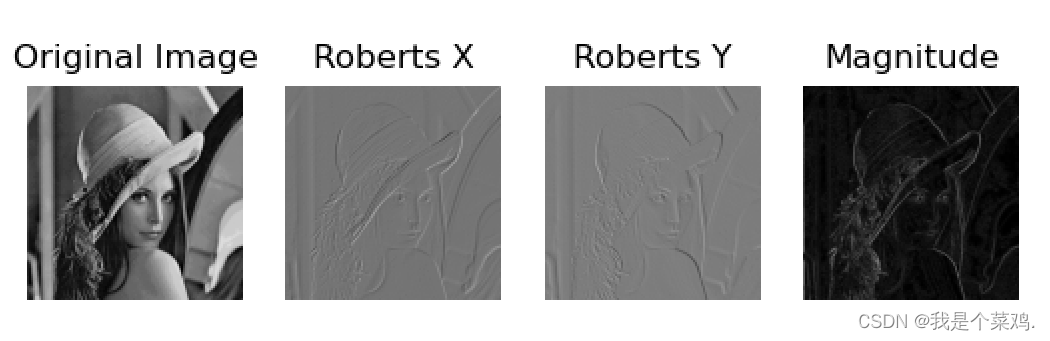
1、Roberts 算子
原理: 基于交叉差分的梯度算法,通过局部差分计算检测边缘线

通过局部差分计算检测边缘线条。常用来处理具有陡峭的低噪声图像,当图像边缘接近于正45度或负45度时,该算法处理效果更理想。其缺点是对边缘的定位不太准确,提取的边缘线条较粗。
import cv2 import numpy as np import matplotlib.pyplot as plt image = cv2.imread("../images/1.png", cv2.IMREAD_GRAYSCALE) # 1.定义 Roberts 算子的卷积核 roberts_x = np.array([[1, 0], [0, -1]], dtype=np.float32) roberts_y = np.array([[0, 1], [-1, 0]], dtype=np.float32) # 2.二维卷积操作 # 使用 filter2D 函数应用 Roberts 算子卷积核 gradient_x = cv2.filter2D(image, cv2.CV_64F, roberts_x) gradient_y = cv2.filter2D(image, cv2.CV_64F, roberts_y) # 3.计算梯度幅值 gradient_magnitude = np.sqrt(gradient_x**2 + gradient_y**2) # 转换结果为8位图像 gradient_magnitude = np.uint8(gradient_magnitude) # 显示原图、Roberts算子的结果和应用结果 plt.subplot(1, 4, 1) plt.imshow(image, cmap='gray') plt.title("Original Image") plt.axis("off") plt.subplot(1, 4, 2) plt.imshow(gradient_x, cmap='gray') plt.title("Roberts X") plt.axis("off") plt.subplot(1, 4, 3) plt.imshow(gradient_y, cmap='gray') plt.title("Roberts Y") plt.axis("off") plt.subplot(1, 4, 4) plt.imshow(gradient_magnitude, cmap='gray') plt.title("Magnitude") plt.axis("off") plt.show()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
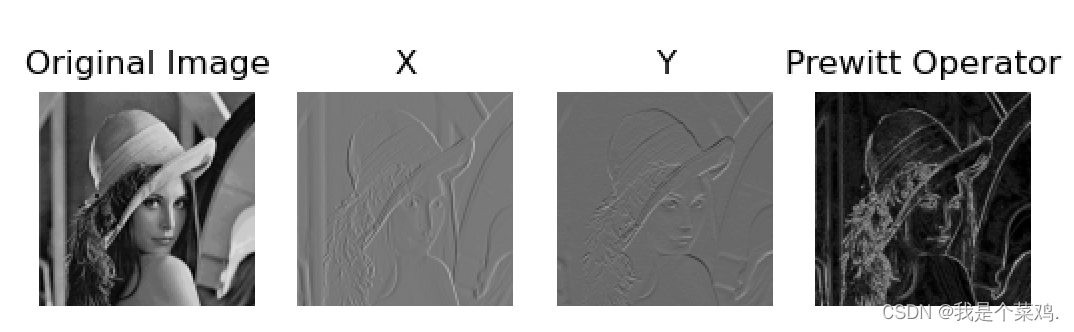
2、Prewitt 算子
Prewitt算子使用中心差分法计算梯度
相比Roberts 2×2 模板考虑更多的相邻像素,更好地捕捉到图像中的局部变化import cv2 import numpy as np import matplotlib.pyplot as plt # 读取图像 img = cv2.imread("../images/1.png", cv2.IMREAD_GRAYSCALE) # 1.使用Prewitt算子 kernelx = np.array([[1, 0, -1], [1, 0, -1], [1, 0, -1]], dtype=int) kernely = np.array([[1, 1, 1], [0, 0, 0], [-1, -1, -1]], dtype=int) # 2.卷积 gradient_x = cv2.filter2D(img, cv2.CV_64F, kernelx) gradient_y = cv2.filter2D(img, cv2.CV_64F, kernely) # 3 # 计算梯度幅值 gradient_magnitude = np.sqrt(gradient_x**2 + gradient_y**2) # 转换结果为8位图像 gradient_magnitude = np.uint8(gradient_magnitude) # 显示原图、水平梯度、垂直梯度、Prewitt算子的结果 plt.subplot(141), plt.imshow(img, cmap='gray'), plt.title('Original Image'), plt.axis('off') plt.subplot(142), plt.imshow(gradient_x, cmap='gray'), plt.title('X'), plt.axis('off') plt.subplot(143), plt.imshow(gradient_y, cmap='gray'), plt.title('Y'), plt.axis('off') plt.subplot(144), plt.imshow(gradient_magnitude, cmap='gray'), plt.title('Prewitt Operator'), plt.axis('off') plt.show()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
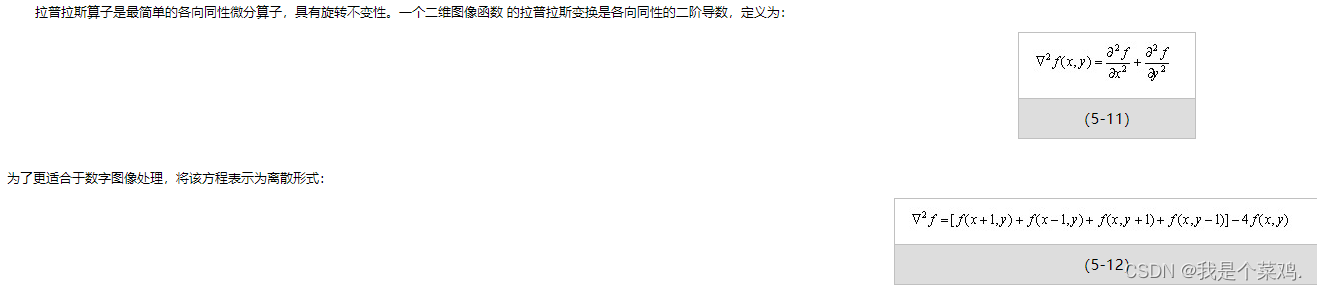
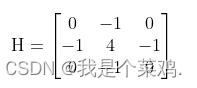
3、Laplace
拉普拉斯算子 Laplacian算子是基于二阶导数的边缘检测算子。二阶微分算子主要用于检测图像中的灰度变化的变化率,或者说是梯度的变化率。在边缘处,梯度的变化率最大,因此二阶微分算子会在边缘位置产生较大的响应。
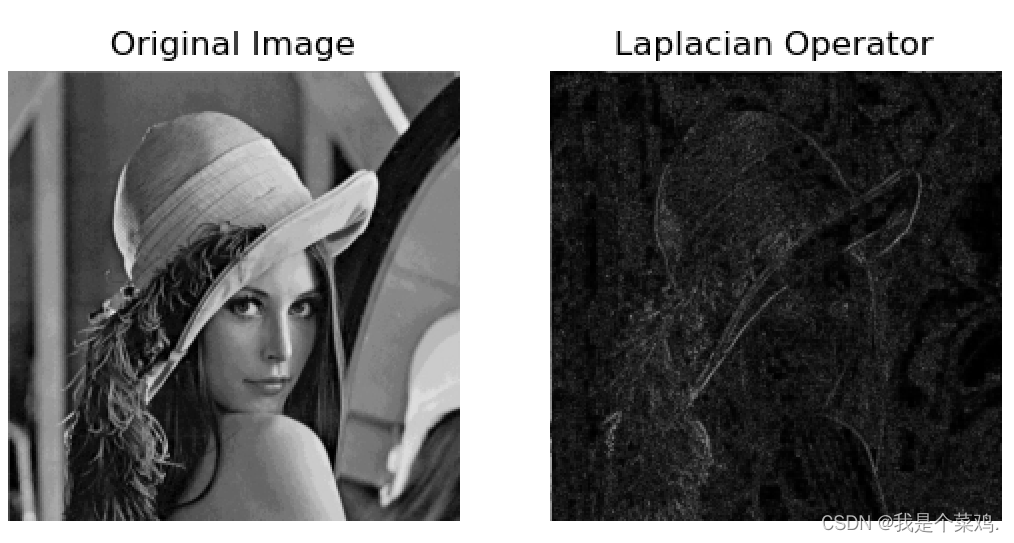
import cv2 import numpy as np import matplotlib.pyplot as plt # 读取图像 img = cv2.imread('../images/1.png', cv2.IMREAD_GRAYSCALE) # 使用拉普拉斯算子 laplacian = cv2.Laplacian(img, cv2.CV_64F) # 转换结果为8位图像 laplacian = np.uint8(np.absolute(laplacian)) # 显示原图和拉普拉斯算子的结果 plt.subplot(121), plt.imshow(img, cmap='gray'), plt.title('Original Image'), plt.axis('off') plt.subplot(122), plt.imshow(laplacian, cmap='gray'), plt.title('Laplacian Operator'), plt.axis('off') plt.show()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
4、Canny算子
Canny基本步骤:
1.去噪:应用高斯滤波来平滑图像
2.找图像的梯度,先将卷积模板分别作用x和y方向,再计算梯度幅值和方向(
)
3.非极大值抑制:保留梯度方向上的局部极大值,细化边缘
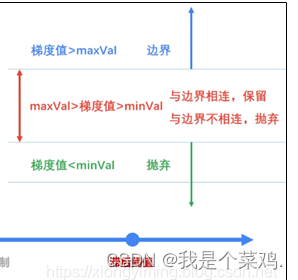
4.确定边缘。使用双阈值算法确定最终的边缘信息
import cv2 import numpy as np import matplotlib.pyplot as plt # 读取图像 image = cv2.imread('../images/1.png', cv2.IMREAD_GRAYSCALE) # 高斯滤波降噪 gaussian = cv2.GaussianBlur(image, (5, 5), 0) # 使用Canny算子进行边缘检测 edges = cv2.Canny(gaussian, 50, 150) # 50和150是Canny算子的两个阈值,可调整 # 显示原始图像和边缘检测结果 plt.subplot(121), plt.imshow(image, cmap='gray') plt.title('Original Image'), plt.xticks([]), plt.yticks([]) plt.subplot(122), plt.imshow(edges, cmap='gray') plt.title('Edge Image'), plt.xticks([]), plt.yticks([]) plt.show()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21

5、四种算子的比较


二、角点检测
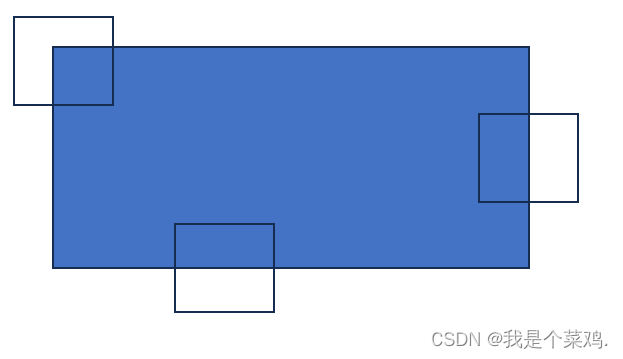
在角上 不管你把它朝哪个方向移动,像素值都会发生很大变化。
1.Moravec
注:权重函数 当像素位置 (x,y) 位于滑动窗口内时,权重函数为1,否则为0。
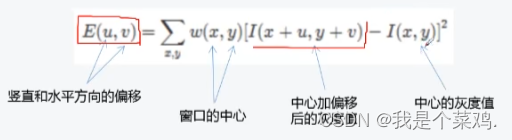
当像素位置 (x,y) 位于滑动窗口内时,权重函数为1,否则为0。E(u,v)越大 越可能是角点
2.harris
在Moravec 基础上 泰勒展开


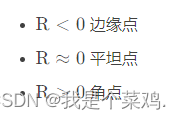
角点响应函数R

3.Shi-Tomasi
Shi-Tomasi 角点检测改进了Harris角点检测算法的R响应函数,R响应函数更加简单高效。
-
相关阅读:
【Rust日报】2022-07-23 用 Rust 编写的强类型 Elasticsearch DSL
快速了解什么是跳跃表(skip list)
Redis 字符串( String )
4.云原生-KubeSphere中安装GitLab(三)
Rust开发WebAssembly在Html和Vue中的应用【后篇】
基于javaweb+mysql的电影票售票管理系统
环形进度条组件
Linux基础学习——shell脚本基础:bash脚本编程基础及配置文件
postgreSQL15发布,难掩激动快速尝鲜
10.1作业
- 原文地址:https://blog.csdn.net/weixin_45988242/article/details/136350584
