引言
在几年前,我就在一些博客中看到关于CSS中transform的分析,讲到它与线性代数中矩阵的关系,但当时由于使用transform比较少,再加上我毕竟是个数学学渣,对数学有点畏难心理,就有点看不下去,所以只是随便扫了两眼,就没有再继续了解了。现在在学习可视化,又遇到了这个点,又说到这是可视化的基础知识,既然这样,那看来还是逃不过去,那就再多了解一点吧。
transform的作用
使用过transform的前端小伙伴一定不陌生,通过对CSS中transform属性的设置,我们可以对DOM元素进行缩放、旋转、平移,以及扭曲,从而改变元素的位置、形状、大小和角度。
仿射变换
CSS中的transform对应到图形学中的概念就是仿射变换。
仿射变换简单来说就是“线性变换 + 平移”。
在CSS中对某个DOM元素应用仿射变换,可以简单理解成是把这个元素原本的整个坐标系进行了变换,并且这个坐标系的原点在最初始时位于DOM元素的中心,X轴朝右、Y轴朝上、Z轴朝外,也就是朝向屏幕。
所以就是说,对某个DOM元素进行仿射变换,就相当于对它所对应的几何图形的每个顶点向量进行仿射变换。
关于图形的仿射变换,有两个性质:
第一,仿射变换不改变直线段的形状,也就是说,应用仿射变换后,直线段依旧是直线段;
第二,应用相同的仿射变换后,两条直线段的长度比例保持不变。
平移
接下来我们先说平移,平移变换是最简单的仿射变换。
假设存在一个向量P(x0, y0),我们想要把它沿着另一个向量Q(x1, y1)的方向移动对应距离,那只要将两个向量相加,我们就可以得到这个新的向量它的坐标。
x = x0 + x1
y = y0 + y1
这就是平移变换的公式。
线性变换
根据公式可以看出,应用平移变换后,原始坐标系的原点会发生变化。
但是应用线性变换后,原点却并不会变化;下面来讲解两个常用的线性变换:旋转和缩放。
-
旋转
首先我们先来看旋转变换。
假设存在一个向量
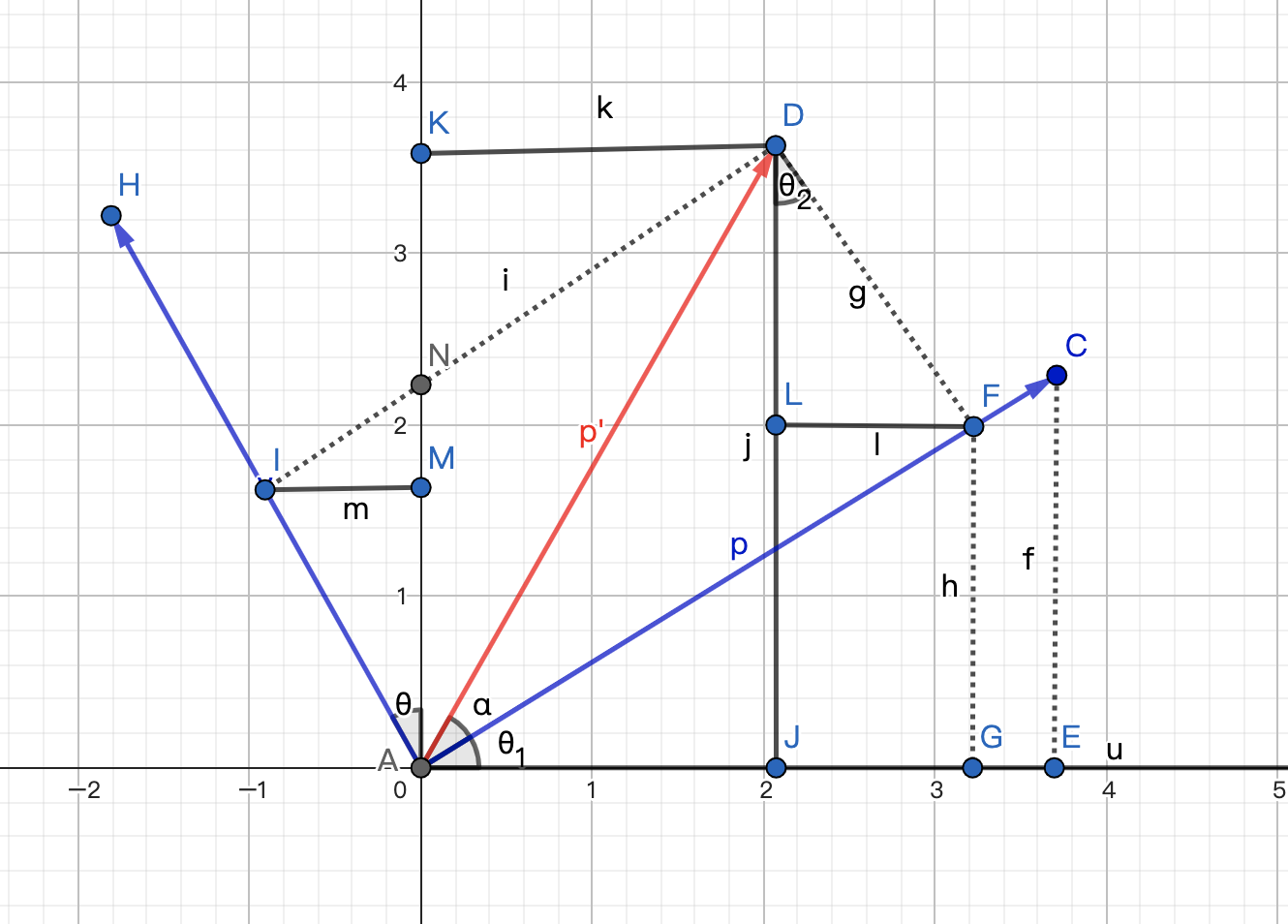
P(x0, y0),长度为r,与X轴夹角为θ,现在将它逆时针旋转α角,那么此时新的向量P'的坐标x和y分别是多少呢?首先我们根据圆的参数方程,可以得到如下公式:
x0 = r * cosθ y0 = r * sinθ x = r * cos(α+θ) y = r * sin(α+θ)但这样并看不出新旧坐标之间的关联,所以需要进行推导。
在上图中,我们假设旋转θ角后得到了一个新的坐标系(蓝色),此时我们可以求得向量P'在新坐标系的坐标,此时P'在新坐标系的坐标可以表示为:
x' = r * cosα -> AF y' = r * sinα -> AI分别相当于是线段AF和AI的长度。
此时依旧看不出新旧坐标之间的关联,我们还需要继续推导,求出向量P'在原坐标系的值,在上图中相当于我们要求出线段AJ和AK的长度。
-
先来求AJ的长度
首先我们从图中可以看出
AJ = AG - JG, 并且AG = AF * cosθ;同时JG 和LF的长度相同,DF与AI的长度相同,且角FDJ的度数也是θ,所以可以得到
JG = AI * sinθ。最终我们可以得到如下公式:
AJ = AF * cosθ - AI * sinθ = r * cosα * cosθ - r * sinα * sinθ又因为:
x0 = r * cosθ y0 = r * sinθ就可以得到AJ的长度,也就是新向量的x坐标
x = x0 * cosα - y0 * sinα -
接着来求AK的长度
从图中我们也可以看出
AK = AM + MK,并且AM = AI * cosθMK又可以分为MN和NK两段,相当于
MK = AF * sinθ。最终我们可以得到:
AK = AI * cosθ + AF * sinθ = r * sinα * cosθ + r * cosα * sinθ再加上原坐标和角度及半径的关系,就可以得到AK的长度,也就是新向量的y坐标:
y = x0 * sinα + y0 * cosα
至此我们就得到了新坐标和原坐标以及旋转角度之间的关系,也就是旋转变换的公式:
x = x0 * cosα - y0 * sinα y = x0 * sinα + y0 * cosα根据线性代数的知识,我们可以使用矩阵的形式来表示以上公式:
[x] [cosα -sinα] [x0] | | = | | x | | [y] [sinα cosα] [y0] -
-
缩放
接着我们继续看缩放变换。缩放变换相当于是让向量与标量相乘。
比如我们使X轴缩放比例为sx,使Y轴缩放比例为sy,就可以得到新向量的坐标为:
x = sx * x0 y = sy * y0缩放比旋转简单一些,可以直接写出矩阵形式的公式:
[x] [sx 0] [x0] | | = | | x | | [y] [0 sy] [y0]
至此,我们就基本了解了仿射变换的公式,并且可以看出线性变换的公式可以用矩阵相乘的形式进行表示。
除了不改变原点,线性变换还有另外一个性质,就是可以进行叠加;多个线性变换的叠加结果就是将线性变换的矩阵依次相乘,最后再与原始向量相乘。
根据以上内容,我们可以得到仿射变换的一般表达式:
P = M x P0 + P1
M为多个线性变换的叠加结果,也就是变换矩阵的相乘结果,P0为原始向量坐标,P1为平移。
公式优化
为了便于计算,我们还可以对以上的仿射变换表达式进行优化,通过增加维度来使用矩阵进行表示:
[P] [M P1] [P0]
| | = | | x | |
[1] [0 1] [1 ]
这实际上就是给线性空间增加了一个维度,用高维度的线性变换表示了低维度的仿射变换。
这种n+1维坐标被称为齐次坐标,对应的矩阵被称为齐次矩阵。
我们需要注意,由于平移变换会改变坐标原点,不同的变换顺序很可能会导致不同的变换结果,所以要注意矩阵相乘的顺序。
公式应用
接下来我们就来应用一下线性变换的公式。
假设现在在页面上有一个div。
<div class="block separate">我使用分开写div>
.block {
width: 100px;
height: 100px;
color: #fff;
background: orange;
&.separate {
transform: rotate(30deg) translate(100px, 50px) scale(1.5);
}
}
通过简单的旋转和平移,我们改变了元素的角度、位置和大小。
此时我们对于transform的变换是分开写的,但在CSS的transform中,可以使用一个matrix函数,让我们对这些变换进行合并编写。
首先我们引入一个ogl库,使用其中定义的矩阵类Mat3(也可以借助其他数学库,比如mathjs):
import { Mat3 } from 'ogl';
然后针对上面的3个变换,分别定义三个变换矩阵,分别是旋转矩阵、平移矩阵和缩放矩阵:
const rad = Math.PI / 6;
let a = new Mat3(
// 旋转矩阵
Math.cos(rad), -Math.sin(rad), 0,
Math.sin(rad), Math.cos(rad), 0,
0, 0, 1
);
let b = new Mat3(
// 平移矩阵
1, 0, 100,
0, 1, 50,
0, 0, 1
);
let c = new Mat3(
// 缩放矩阵
1.5, 0, 0,
0, 1.5, 0,
0, 0, 1
);
// -------------
// 使用math.js
const a = math.matrix(
[
[Math.cos(rad), -Math.sin(rad), 0],
[Math.sin(rad), Math.cos(rad), 0],
[0, 0, 1]
]
);
const b = math.matrix(
[
[1, 0, 100],
[0, 1, 50],
[0, 0, 1]
]
);
const c = math.matrix(
[
[1.5, 0, 0],
[0, 1.5, 0],
[0, 0, 1]
]
);
接着对三个矩阵进行相乘,得到axbxc的结果:
const res = [a, b, c].reduce((prev, current) => {
return current.multiply(prev); // prev x current 结果保存到current
});
// -------------
// 使用math.js
let res = math.multiply(a, b);
res = math.multiply(res, c);
最后我们利用CSS变量将JS的计算结果应用到样式上:
.block {
// ...
&.combine {
--trans: none;
transform: var(--trans);
}
}
由于CSS的matrix是一个简写的齐次矩阵,它省略了三阶齐次矩阵第三行的0,0,1,所以只有6个值。
const combine = document.querySelector('.combine');
const s = res.slice(0, 6);
matrix貌似是列主序,所以在设置的时候,需要按如下顺序赋值:
const combine = document.querySelector('.combined');
combine.style.setProperty('--trans', `matrix(
${s[0]},${s[3]},
${s[1]},${s[4]},
${s[2]},${s[5]},
)`);
// -------------
// 使用math.js
const s = Array.from(res).map(item => item.value);
combine.style.setProperty('--trans', `matrix(
${s[0]},${s[3]},
${s[1]},${s[4]},
${s[2]},${s[5]}
)`);
可以明显看出,这样使用的效果,和rotate、translate和scale分开写的效果是一样的。
总结
利用仿射变换,我们可以快速绘制出形态、位置、大小各异的众多几何图形,比如实现粒子动画。
也许在普通的前端开发中,用不到太多,也并不太需要说去利用matrix去减少CSS的代码体积,但如果要去做可视化方面的开发,仿射变换还是可以多去了解一下。