-
Ubuntu18.04安装LeGO-LOAM保姆级教程
系统环境:Ubuntu18.04.6 LTS
1.LeGO-LOAM的安装前要求:
1.1 ROS安装:参考我的另一篇博客Ubuntu18.04安装ROS-melodic保姆级教程_灬杨三岁灬的博客-CSDN博客文章浏览阅读168次。Ubuntu18.04安装ROS-melodic保姆级教程
https://blog.csdn.net/qq_23473839/article/details/131719477
1.2 gtsam安装:
GTSAM源码包:
https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip一定要跟官网同步去下载gtsam-4.0.0-alpha2 。
亲测gtsam-4.0.0运行.launch文件会报[mapOptmization-7] process has died 的错误!!!
报错后安装libparmetis-dev不能解决,非常痛苦!!!
- 1.sudo apt-get update -y
- 2.sudo apt-get install -y libparmetis-dev
亲测gtsam-4.2a7 可完美安装并兼容eigen-3.3.9
下面按照LeGO-LOAM官网安装gtsam-4.0.0-alpha2 。
- wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip #替换成自己的目录
- cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
- cd ~/Downloads/gtsam-4.0.0-alpha2/
- mkdir build && cd build
- cmake .. #做完这一步不用make check 直接make install
- sudo make install # 花费时间较久,无报错显示100%即为安装完成
2.安装LeGO-LOAM:
2.1.建立catkin工作空间(我取名为LeGO-LOAM)
2.2.建立src文件夹
2.3.下载并编译
- cd ~/catkin_ws/src #替换成自己的目录
- git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
- cd ..
- catkin_make -j1 #LeGo-LOAM作者说第一次要用j1 以后再次编译可以放飞自我
3.运行LeGO-LOAM:
Shell1:
- source devel/setup.bash
- roslaunch lego_loam run.launch
Shell2:(跑LeGO-LOAM的数据集,直接用nsh_indoor_outdoor.bag以前LOAM的数据集就行)
rosbag play nsh_indoor_outdoor.bag --clock --topic /velodyne_points /imu/data这里注意:一定要写上后面的--clock 要不然在rviz里面是真不显示数据呀!真难受!
结果:
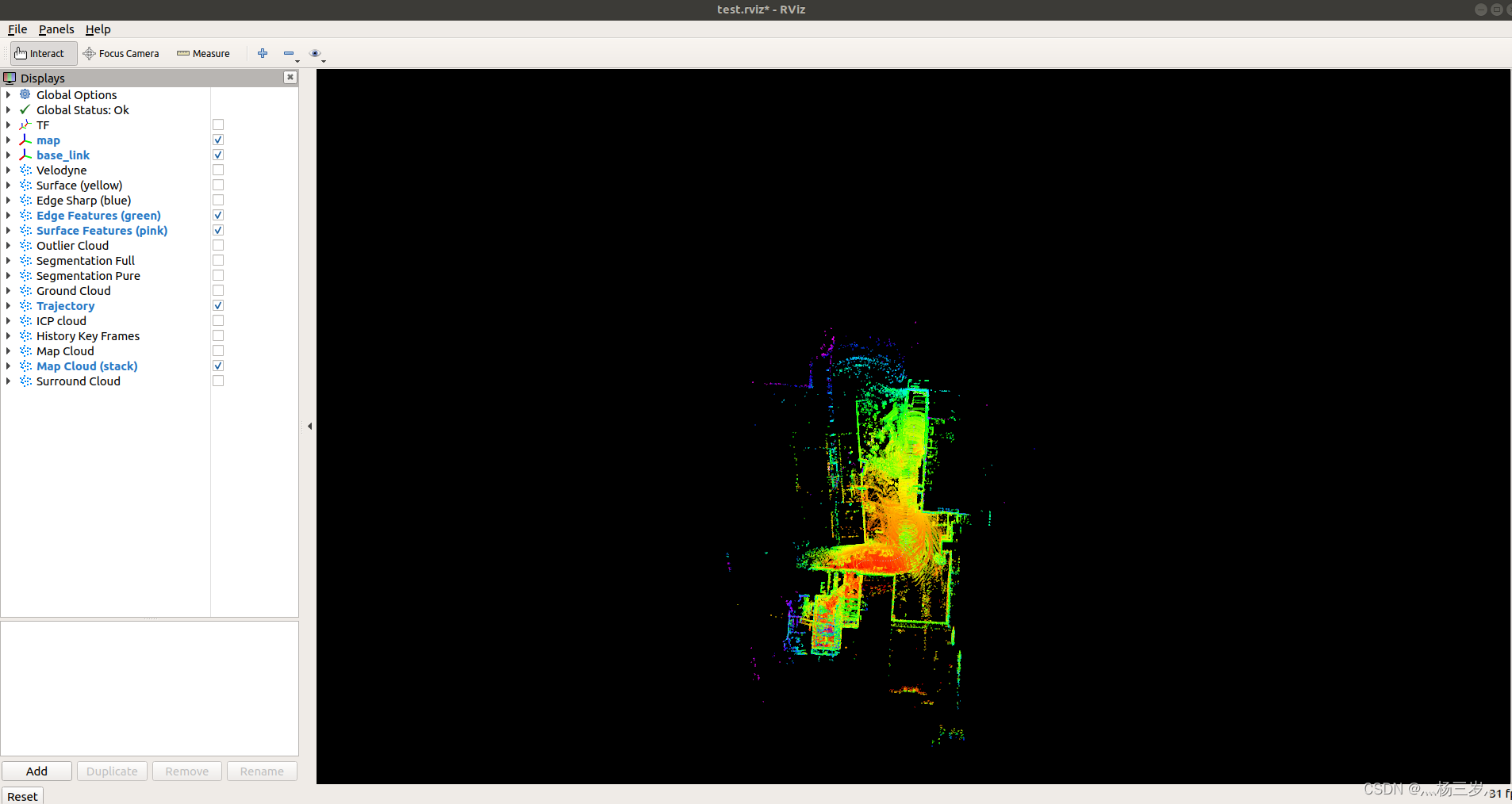
-
相关阅读:
C# WPF 开发一个 Emoji 表情查看软件
CAPL学习之路-以太网函数
go的orm框架-Gorm
他没有输出一直卡在后面不懂,看报错应该是卡在# 循环生成诗句了
登录注册实现
Redux 4.2 版本发布由createStore --》configureStore
openssl生成SM2公私钥对命令详解
OneFlow源码解析:静态图与运行时
Linux系统64位AT&T系统调用汇编指令syscall
Python Appium 安卓自动化测试 基本使用 - Phone Spider
- 原文地址:https://blog.csdn.net/qq_23473839/article/details/134457271