-
串口通信原理及应用
1. 前言介绍
串口通信是一种设备间非常常用的串行接口,以比特位的形式发送或接收数据,由于成本很低,容易使用,工程师经常使用这种方式来调试 MCU。
串口通信应用广泛,可以实现两个设备之间的通信,例如STM32与wifi、蓝牙、4G、NB-IoT使用的都是串口通信协议。
2. 连接方式
如下图所示:
己方的RX(接收引脚)对应对方的 TX(发送引脚),而己方的 TX 则是接收对方的 RX 引脚,这种方法可以用于双向通信。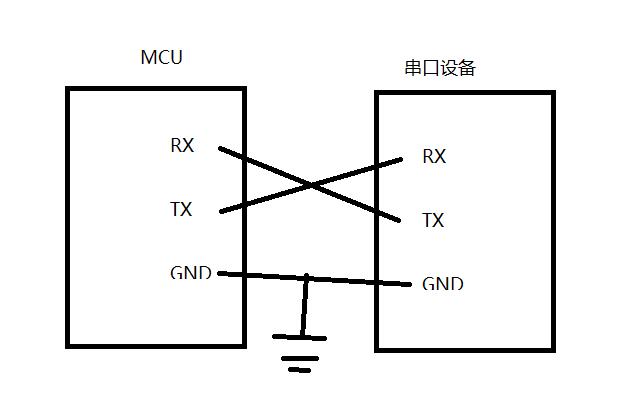
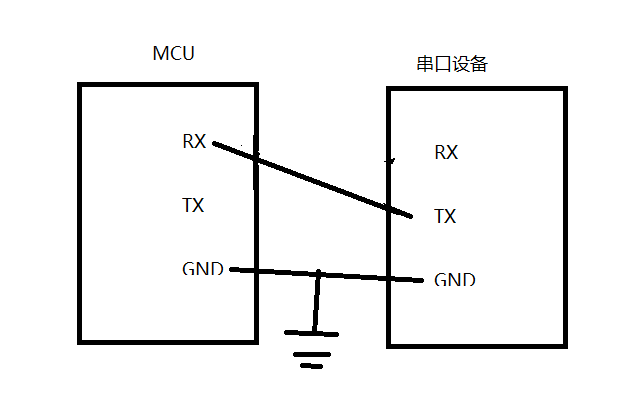
如若只需进行单向通信,采用以下方式也是可以的,此方法通常为仅接收外部设备传来的数据:
3. 数据帧格式
起始位(Start Bit):数据帧的起始位,用于标识数据传输的开始。通常为逻辑低电平。
数据位(Data Bits):数据帧中实际传输的数据位数。常见的数据位数有5位、6位、7位和8位。
校验位(Parity Bit):用于校验数据位的奇偶性,以检测和纠正传输中的错误。常见的奇偶校验方式有奇校验和偶校验,也可以选择不使用校验位。
停止位(Stop Bit):数据帧的结束位,用于标识数据传输的结束。通常为逻辑高电平。
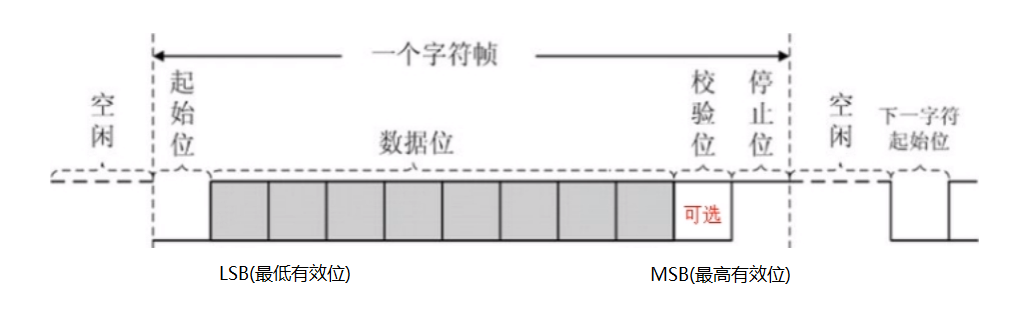
如图所示,可以看到串口数据是低有效位优先传输(LSB)。
4. 代码编写
通过STM32F407的数据手册可以查询到,PA9和PA10引脚是具有 USART1功能的,它被挂载在 APB2 总线上:
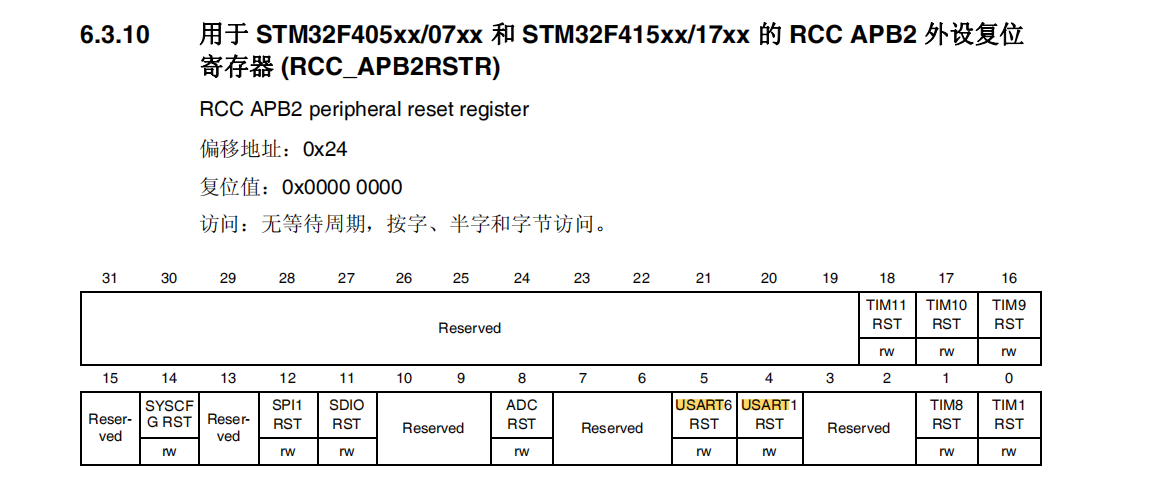
所以我们需要 开启 GPIOA端口时钟以及启用 串口1时钟://开启硬件时钟:GPIO端口硬件时钟、USART硬件时钟 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);- 1
- 2
- 3
PA9 和 PA10 是作为复用功能使用的,所以还要开启复用功能:
//配置GPIO引脚为复用功能模式 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10; //指定9、10号引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//配置为复用功能模式 GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//速度越高,功耗就越高,但是响应速度也更快 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;//不需要使能内部上下拉电阻 GPIO_Init(GPIOA, &GPIO_InitStructure);- 1
- 2
- 3
- 4
- 5
- 6
- 7
然后依次对串口参数进行配置:
//将对应的GPIO引脚连接到串口 GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //配置串口相关的参数:串口号,波特率,数据位,停止位,流控制 //波特率 USART_InitStructure.USART_BaudRate = baud; //接收长度 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //停止位 USART_InitStructure.USART_StopBits = USART_StopBits_1; //校验位,不需要奇偶校验 USART_InitStructure.USART_Parity = USART_Parity_No; //控制位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //模式:支持接收支持发送 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
以下是完整的配置函数:
void usart1_init(uint32_t baud) { //开启硬件时钟:GPIO端口硬件时钟、USART硬件时钟 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //配置GPIO引脚为复用功能模式 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10; //指定9、10号引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//配置为复用功能模式 GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//速度越高,功耗就越高,但是响应速度也更快 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;//不需要使能内部上下拉电阻 GPIO_Init(GPIOA, &GPIO_InitStructure); //将对应的GPIO引脚连接到串口 GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //配置串口相关的参数:串口号,波特率,数据位,停止位,流控制 USART_InitStructure.USART_BaudRate = baud; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No; //校验位,不需要奇偶校验 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //模式:支持接收支持发送 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure); //配置串口相关的中断 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); //使能串口工作 USART_Cmd(USART1, ENABLE); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
以下是其他配置文章
STM32F103ZET6点亮板载LED灯 -
相关阅读:
Apache OFBiz 路径遍历导致RCE漏洞复现(CVE-2024-36104)
Ae:内容识别填充面板
【PHP库】phpseclib - sftp远程文件操作
自动化测试基础简介(本质)
Solidity智能合约开发 — 3.5-库合约
C# Event (1) —— 我想搞个事件
Ubuntu系统迁移
Java中遍历HashSet集合有哪些方法呢?
mysql远程登录
Knative部署应用以及应用的更新、应用的分流(二)
- 原文地址:https://blog.csdn.net/qq_53381910/article/details/134472373
