-
IMU预积分的过程详解
一、IMU和相机数据融合保证位姿的有效性:
-
当运动过快时,相机会出现运动模糊,或者两帧之间重叠区域太少以至于无法进行特征匹配,所以
纯视觉SLAM对快速的运动很敏感。而有了IMU,即使在相机数据无效的那段时间内,也能保持一个较好的位姿估计,这是纯视觉
SLAM 无法做到的。 -
当图像发生变化时,本质上我们没法知道是相机自身发生了运动,还是外界条件发生了变化,所以
纯视觉SLAM难以处理动态的障碍物。而IMU能获取自己的运动信息,从某种程度上减轻动态物体的影响。 -
IMU虽然可以测得角速度和加速度,但这些量都存在
明显的漂移,使得积分两次得到的位姿数据非常不可靠。相比于IMU,相机数据基本不会有漂移,所以相机数据可以有效地估计并修正IMU读数中的漂移使得在慢速运动后的位姿估计依然有效。
二、IMU和Camera数据融合获取位姿的主要流程
1、利用相机和IMU分别进行图像采集和惯性数据采集,且IMU的采集频率大于相机的采集频率
2、提取相机获取的每一顿图像的特征点,然后提取特征点的描述子,匹配特征点计算相机位姿
3、对IMU得到的多组IMU数据进行预积分,计算出两图像对应的IMU的位姿和速度
4、IMU初始化,这一步的目的是获取IMU参数较好的初始值: 速度、重力以及Bias。
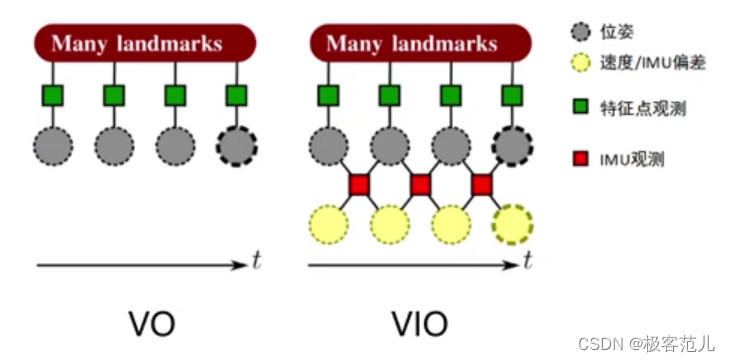
三、构建
视觉残差和惯性残差的统一损失函数进行联合优化- 视觉里程计VO通过最小化相关键帧的
重投影误差,计算得到相机的位姿和地标的位置 - IMU对相邻两帧的位姿之间添加约束,而且对每一帧添加了状态量:
陀螺仪和加速度的偏差
四、IMU预积分过程
1、IMU测量模型
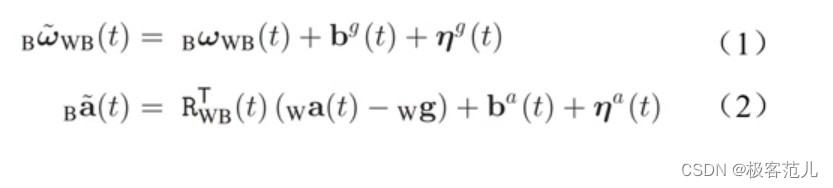
角速度是陀螺仪得到的, B是刚体,IMU与相机的物体坐标系,W是世界坐标系,与角速度和陀螺仪的偏置有关系,与陀螺仪存在的噪声有关,
加速度是由R旋转乘加速度减重力加速度的差,加速度计的偏置,噪声
2、IMU运动学模型

某一时刻的旋转乘角速度, 速度与加速度是有关系的,位姿也可以通过速度求解出来的3、基于运动学模型,可得t和t+Δt时刻状态关系
-
-
相关阅读:
echarts-wordcloud ——文字云制作企业标签——基础积累
临近秋招了,讲讲大家关心的问题
大数据在数字孪生中的应用与挑战
【Python 实战基础】Pandas如何从字符串中解析某一数据,并统计多于一次的该数据
Hyperledger Fabric 2.2 学习笔记:测试网络test-network
pytoch安装
PL/SQL编程-存储过程
【YOLO】语义分割和实例分割(四)
如何利用分层测试概念设计针对性测试用例
【安卓app毕业设计源码】基于Uniapp的掌上校园管理系统
- 原文地址:https://blog.csdn.net/Prototype___/article/details/134009161