-
STM32F4X之GPIO
一、GPIO概述
主控芯片信息如下:

- 主频:168MHZ
- 内核:ARM-M4
- FLASH:1M
- SRAM:192KB
- 引脚:100
- GPIO:82
- 电压:1.8~3.6V
1.1GPIO概念及其作用

GPIO概念:通用输入输出(General Purpose Input Output),主要作用是与外部器件或设备进行数据交流和信息交换。
注意:
芯片管脚和GPIO的区别:管脚不一定是GPIO口,但是GPIO(IO)口一定是管脚。
芯片管脚:STM32F407VGT6总共100管脚,其中GPIO口82个。
1.2GPIO口的管理与控制

1PORT:端口/组 每组16个IO口

GPIO口的4种工作模式
- 输出
- 输入
- 模拟
- 复用
以上4大模式可以划分为八种功能:
(1)输入浮空
(2)输入上拉
(3)输入下拉
(4)模拟功能
(5)具有上拉或下拉功能的开漏输出情况下。
(6)具有上拉或下拉功能的推挽输出。
(7)具有上拉或下拉功能的复用功能推挽。
(8)具有上拉或下拉功能的复用功能开漏。
注意:GPIO的以上8中功能由芯片内部的GPIO控制器控制
二、GPIO口框架分析

整体框架图分析

输出框架分析
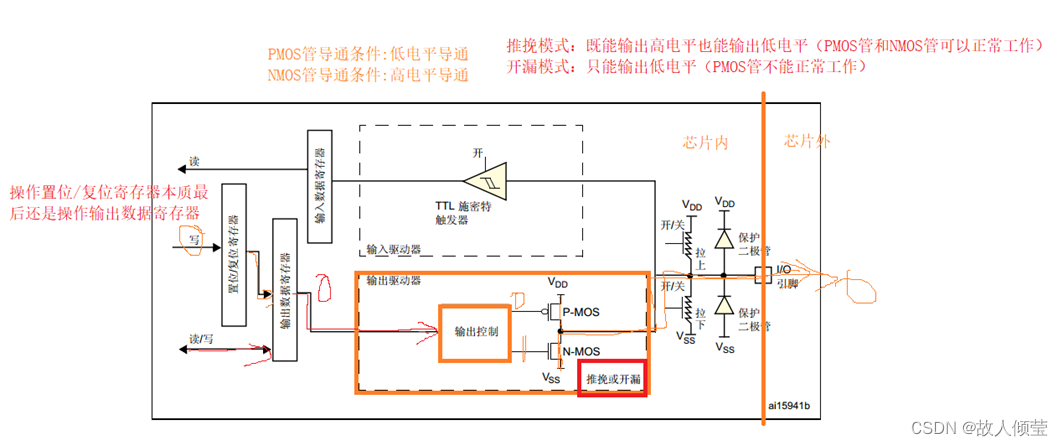
GPIO口配置为输出模式时信号传输方向:芯片内部到芯片外部

是否打开弱上拉电阻和下拉电阻 ,取决于GPIOx_PUPDR 寄存器中的值。
补充:
①上拉:一个管脚接一个电阻的一端,电阻的另一端接到电源。
上拉电阻是用来解决总线驱动能力不足时提供电流的即拉电流。

②下拉:一个管脚接一个电阻的一端,电阻的另一端接到地,电阻同时起限流作用!

- 当选择的是推挽功能:输出控制的输入源输入了一个“1”,P-MOS管导通,N-MOS管不导通,由于P-MOS管导通以后输出的IO口与VDD连接,这时输出高电平。输出控制的输入源输入了一个“0”,P-MOS管不导通,N-MOS管导通以后输出的IO口与VSS连接,这个时候输出低电平。
重点:在推挽输出模式下,可以输出高电平(逻辑1)与低电平(逻辑0)。
应用:需要驱动能力强的地方:如驱动LED灯、驱动三极管、驱动蜂鸣器、通信协议中的时钟线或输出数据线。
- 当选择的是开漏功能的时候:输出控制的输入源输入一个“1”,P-MOS管和N-MOS管都不工作,这个时候输出什么电平状态不确定,取决于外部电路。输出控制的输入源输入一个“0”,P-MOS管不工作,N-MOS管导通,IO口输出低电平。
重点:在开漏输出模式下,可以输出低电平(逻辑0)但是不能输出高电平(逻辑1)。
注意:在使用开漏的情况下也可以输出高点平,但是必须外接上拉才可以。
应用: 一般在通信协议(IIC,单总线)中的输入数据线。
芯片内部有上拉与下拉;并且内部上拉与下拉都有独立开关控制。内部上下拉都是弱上下拉{上下拉电阻阻值不一样而已,如果想要输出能力强必须外接上下拉。
注意:
当配置为GPIO口配置为输出时,输入部分依然可以正常工作。
输入框架分析
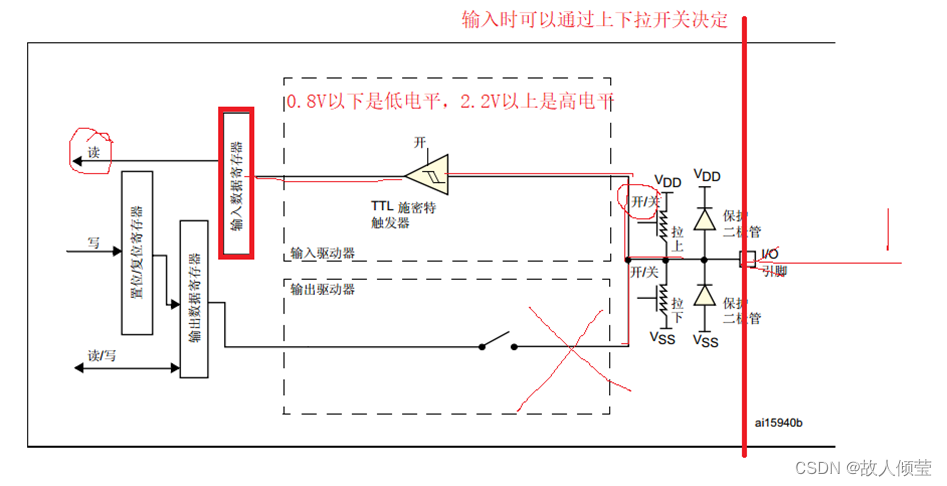
信号传输方向:芯片外部到芯片内部
GPIO口配置为输入模式:
- 输出缓冲器被关闭即输出功能断开了。
- 根据 GPIOx_PUPDR 寄存器中的值决定是否打开上拉和下拉电阻.。
输入数据寄存器的读访问可获取 I/O 状态.即要获取IO端口的高点电平,直接读取输入数据寄存器即可。

IO口来的信号经过施密特触发器,这个时候外部的模拟量就转成了数字量(逻辑电平)。并且这个数字量会被存储到输入数据寄存器.
IO口作为输入情况时,IO口的输出部分已经关闭。
根据要不要使用上下拉将输入分为以下三种情况:
浮空输入模式:即不采用上下拉,I/O的电平状态是不确定的,完全由外部输入决定;如果在无信号输入的情况下,读取该端口的电平是不确定的。
注意: 在I/O引脚悬空时,接电阻就是为了防止输入端悬空,从而提高系统的抗干扰能力。减弱外部电流对芯片产生的干扰.
上拉输入模式:即采用上拉电阻。在无信号输入的情况下,输入端的电平可以保持在高电平;此模式下可以检测到外部低电平。
下拉输入模式:即采用下拉电阻。在无信号输入的情况下,输入端的电平可以保持在低电平;此模式下可以检测到外部高电平。
三、GPIO口相关寄存器分析
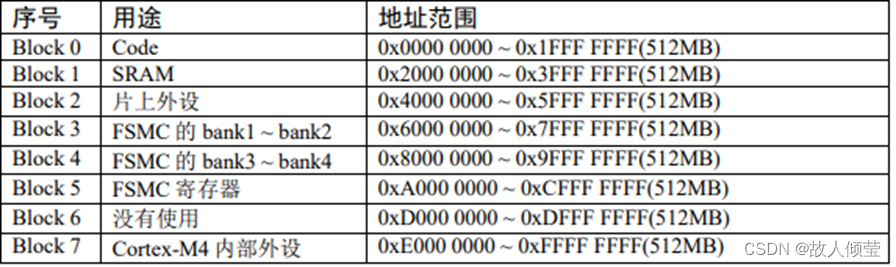
一 内存映射:将芯片内存空间分配的过程。

FLASH:0X080000000~0X080FFFFFF =1M
SRAM:CCM+112SRMA+16SRAM = 192KB
注意:CCM专门给内核使用的高速SRAM。
112SRMA+16SRAM = 128KB组成如下:


FLASH数据空间组成:


寄存器映射:将一段具体的内存空间分配给某一个外设使用的的过程。
1.寄存器:寄存器就是一个变量,只不过这个变量的地址固定,变量名固定,也是一个全局变量。
寄存器可以同时被内部电路和外部电路或软件访问,CPU中的寄存器就是其中一种,作为软硬件的接口,广泛的应用在单片机电路中。
2寄存器的特点:
(1)寄存器地址是在芯片中固定好的即和相关硬件绑定在一起的,当向该寄存器写入不同的数据时,硬件的状态会跟随寄存器的数据改变而改变。{重点}
(2)通过寄存器的名字访问每个寄存器。
3寄存器的操作:
寄存器赋值:寄存器名 = 值;
读寄存器的值:变量名 = 寄存器名。
4每个通用 I/O 组包括10个寄存器如下描述:
4 个 32 位配置寄存器( GPIOx_MODER、 GPIOx_OTYPER、GPIOx_OSPEEDR 和 GPIOx_PUPDR)、
2 个 32 位数据寄存器(GPIOx_IDR 和GPIOx_ODR)、
1 个 32 位置位/复位寄存器 (GPIOx_BSRR)、
1 个 32 位锁定寄存器(GPIOx_LCKR)
2 个 32 位复用功能选择寄存器( GPIOx_AFRH 和 GPIOx_AFRL)。
寄存器的访问方式
GPIOA
#define GPIOA ((GPIO_TypeDef *) GPIOA_BASE)
#define GPIOA_BASE (AHB1PERIPH_BASE + 0x0000)
#define AHB1PERIPH_BASE (PERIPH_BASE + 0x00020000)
#define PERIPH_BASE ((uint32_t)0x40000000)
typedef struct
{
__IO uint32_t MODER;
__IO uint32_t OTYPER;
__IO uint32_t OSPEEDR;
__IO uint32_t PUPDR;
__IO uint32_t IDR;
__IO uint32_t ODR;
__IO uint16_t BSRRL;
__IO uint16_t BSRRH;
__IO uint32_t LCKR;
__IO uint32_t AFR[2];
} GPIO_TypeDef;
GPIOA 0x40000000+0x00020000+ 0x0000 = (GPIO_TypeDef *) 0x40020000
可以看出ST将寄存器封装在结构体中,并强行转为结构体指针

所以可以使用结构体指针访问结构体成员,也就是寄存器(适用于所有的外设:GPIO UART….)
GPIOA->ODR
GPIOA->IDR
STM32F407VGT6的GPIO相关的寄存器有以下几个:

GPIO 端口模式寄存器 (GPIOx_MODER) (x = A..I)(GPIOA_MODER地址:0x4002 0000)
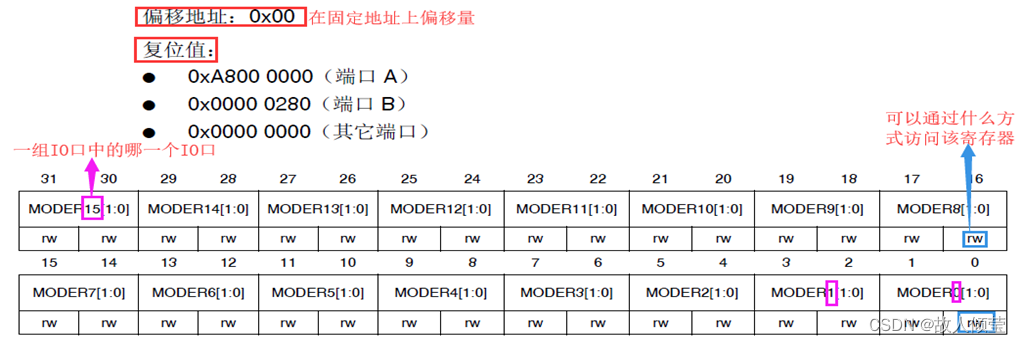
MODERy[1:0]:端口 x 配置位 (Port x configuration bits) (y = 0..15)
这些位通过软件写入,用于配置 I/O 方向模式。
00:输入(复位状态)
01:通用输出模式
10:复用功能模式
11:模拟模式
举例PC4:配置为输出模式如何配置???
GPIOC->MODER &=~(3 << (4*2));
GPIOC->MODER |=0X1 << (4*2);
GPIO 端口输出类型寄存器 (GPIOx_OTYPER) (x = A..I)

位 31:16 保留,必须保持复位值。
位 15:0 OTy[1:0]:端口 x 配置位 (Port x configuration bits) (y = 0..15)
这些位通过软件写入,用于配置 I/O 端口的输出类型。
0:输出推挽(复位状态)
1:输出开漏
举例PC4:配置为推挽类型 如何配置???
GPIOC->OTYPER &=~(0X1 << 4);//推挽输出
GPIO 端口输出速度寄存器 (GPIOx_OSPEEDR) (x = A..I/)

OSPEEDRy[1:0]:端口 x 配置位 (Port x configuration bits) (y = 0..15)
这些位通过软件写入,用于配置 I/O 输出速度。
00:2 MHz(低速)
01:25 MHz(中速)
10:50 MHz(快速)
11:30 pF 时为 100 MHz(高速)(15 pF 时为 80 MHz 输出(最大速度))
配置多少的速度与功能相关。
注意:这里的速度指的是IO口的高低电平的切换速度,而且速度越大,功耗也越大。
举例PC4:配置为2mhz如何配置???
GPIOC->OSPEEDR &=~(0X3 << (4*2));
GPIO 端口上拉/下拉寄存器 (GPIOx_PUPDR) (x = A..I/)

PUPDRy[1:0]:端口 x 配置位 (Port x configuration bits) (y = 0..15)
这些位通过软件写入,用于配置 I/O 上拉或下拉。
00:无上拉或下拉(浮空)
01:上拉
10:下拉
11:保留
举例PC4:配置为无上下拉 如何配置???
GPIOC->PUPDR &=~(0X3 << (4*2));//无上下拉
GPIO 端口输入数据寄存器 (GPIOx_IDR) (x = A..I)

位 31:16 保留,必须保持复位值。
位 15:0 IDRy[15:0]:端口输入数据 (Port input data) (y = 0..15)
这些位为只读形式,只能在只读模式下访问。它们包含相应 I/O 端口的输入值。
当前IO口的状态结果。
GPIO 端口输出数据寄存器 (GPIOx_ODR) (x = A..I)

位 31:16 保留,必须保持复位值。
位 15:0 ODRy[15:0]:端口输出数据 (Port output data) (y = 0..15)
这些位可通过软件读取和写入。
想要IO口输出高电平还是低电平,通过该寄存器写1/0操作即可。
GPIO 端口置位/复位寄存器 (GPIOx_BSRR) (x = A..I)

位 31:16 BRy:端口 x 复位位 y (Port x reset bit y) (y = 0..15)(让IO口输出低电平)
这些位为只写形式,只能在字、半字或字节模式下访问。读取这些位可返回值 0x0000。
0:不会对相应的 ODRx 位执行任何操作
1:对相应的 ODRx 位进行复位
注意: 如果同时对 BSx 和 BRx 置位,则 BSx 的优先级更高。
位 15:0 BSy:端口 x 置位位 y (Port x set bit y) (y= 0..15)(让IO口输出高电平)
这些位为只写形式,只能在字、半字或字节模式下访问。读取这些位可返回值 0x0000。
0:不会对相应的 ODRx 位执行任何操作
1:对相应的 ODRx 位进行置位
RCC AHB1 外设时钟使能寄存器 (RCC_AHB1ENR)
时钟关系:由于STM32是一款低功耗的芯片,每个功能都进行时钟控制,不开启相应的时候,不能正常工作。使用到GPIO口,就必须开启GPIO口相关的时钟。
有芯片框图得知GPIO口挂载在AHB1总线上,它的时钟线就是AHB1时钟线。

时钟相关的配置在RCC单元中。RCC是专门的时钟控制单元。


四、GPIO口实验设计

设计思路:
硬件初始化
Void led_init(void)
{
IO配置:
1开时钟
2模式:输出模式
3类型:推挽
4速度:2MHZ(默认)
5上下拉:无上下拉(默认)(内部的上下拉很微弱)
注意:初始时刻灯默认不亮
}
点灯算法实现

按键识别(验证基本输入功能)
实验设计:让MCU检测IO口的输入电平,从而判断按键是否按下。
KEY1-->PA0 高电平按下
KEY2-->PE2 低电平按下
KEY3-->PE3 低电平按下
KEY4-->PE4 低电平按下

软件设计
硬件初始化
Void key_init(void)
{
//IO配置:
1开时钟
2模式:输入模式
3上下拉:无上下拉(浮空输入)
}如何判断按键按下算法实现。
需要判断GPIO口的电平状态,去确定按键是否按下如下图(理想状态):

如上图所示按下之后是低电平,松开是高电平,但是按键按下过程中有按键不稳定的情况出现,所以,实现按键操作必须要进行消斗功能,为什么要消斗????
原因如下:
因为按键都是机械式的,两个金属片在接触的瞬间,从微秒级的时间段来看,会存在接触-断开-再接触这样的轻微的抖动。直到两个金属片牢牢的接触到一起之后,抖动才会消失。
消斗原理:
所谓按键去抖动,就是通过各种处理(延时)来消除掉接触再断开这种异常状态的。

一般选择延时来去除抖动。
-
相关阅读:
java计算机毕业设计springboot+vue宠物服务管理系统
Linux 进程管理
图像处理QPixmap、Picture、QBitmap
[AUTOSAR][诊断管理][ECU][$14] 清除诊断相关信息
康耐德的UVW高精度视觉对位平台有什么用?
js中onchange的使用场景及如何使用
第九章-项目资源管理
Jetpack:002-页面与布局
bootstrap fileinput组件 选择文件自动上传
良心之作,7 个值得收藏的 GitHub 开源项目!
- 原文地址:https://blog.csdn.net/weixin_52483742/article/details/133963492