-
Jetson Orin NX 开发指南(5): 安装 OpenCV 4.6.0 并配置 CUDA 以支持 GPU 加速
一、前言
Jetson 系列的开发板 CPU 性能不是很强,往往需要采用 GPU 加速的方式处理图像数据,因此本文主要介绍如何安装带有 GPU 加速的 OpenCV,其中 GPU 加速通过 CUDA 来实现。
参考博客
二、安装 OpenCV 4.6.0
下载 opencv 源码,选择所需要的版本 opencv 4.6.0,相应的扩展 opencv_contrib 4.6.0,以及用于桥接 ROS 和 opencv 的 cv_bridge
Release OpenCV 4.6.0 · opencv/opencv · GitHub
Release 4.6.0 · opencv/opencv_contrib · GitHub
GitHub - ros-perception/vision_opencv at noetic
这里将 opencv 4.6.0 以及相应的扩展 opencv_contrib 4.6.0 下载到 ~/Documents 目录下,编译前现确定 opencv 的安装路径,我的安装路径是
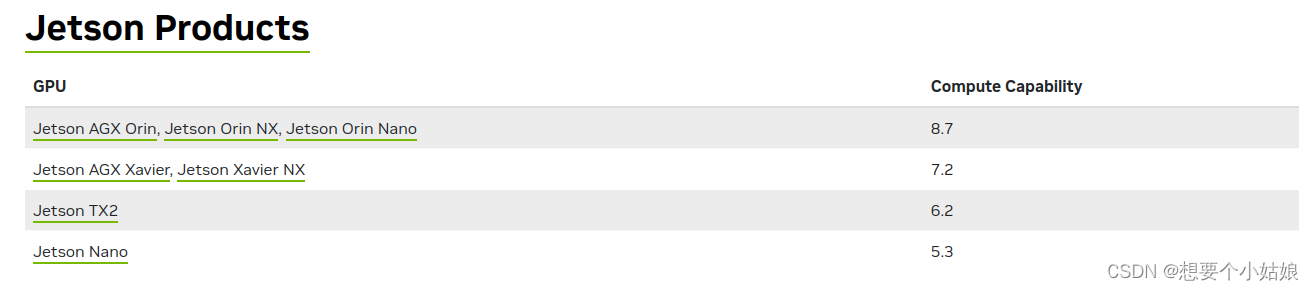
CMAKE_INSTALL_PREFIX=/usr/local/确定 Jetson Orin NX 的算力为 8.7,这个后面要用,参考
CUDA GPUs - Compute Capability | NVIDIA Developer
安装cuda 可以参考上一期文章
Jetson Orin NX 开发指南(4): 安装 cuda 和 realsense_想要个小姑娘的博客-CSDN博客
如果需要安装其他版本的 cuda 与算力的匹配情况可以参考
支持CUDA运算的显卡算力表_cuda算力排行_听风三千里的博客-CSDN博客
https://en.wikipedia.org/wiki/CUDA#GPUs_supported
接下来,进入 opencv 4.6.0 文件夹
- cd ~/Documents/opencv-4.6.0/
- mkdir build && cd build
预编译 opencv 4.6.0 及其扩展模块 opencv_contrib-4.6.0,生成 Makefiles 文件
- cmake -D CMAKE_BUILD_TYPE=RELEASE \
- -D CMAKE_INSTALL_PREFIX=/usr/local/ \
- -D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-4.6.0/modules \
- -D WITH_CUDA=ON \
- -D CUDA_ARCH_BIN=8.7 \
- -D CUDA_ARCH_PTX="" \
- -D ENABLE_FAST_MATH=ON \
- -D CUDA_FAST_MATH=ON \
- -D WITH_CUBLAS=ON \
- -D WITH_LIBV4L=ON \
- -D WITH_GSTREAMER=ON \
- -D WITH_GSTREAMER_0_10=OFF \
- -D WITH_QT=ON \
- -D WITH_OPENGL=ON \
- -D CUDA_NVCC_FLAGS="--expt-relaxed-constexpr" \
- -D WITH_TBB=ON \
- ..
其中
CMAKE_INSTALL_PREFIX=/usr/local/ 为安装地址,
OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-4.6.0/modules 为扩展模块所在路径,
CUDA_ARCH_BIN=8.7 为 GPU 算力,
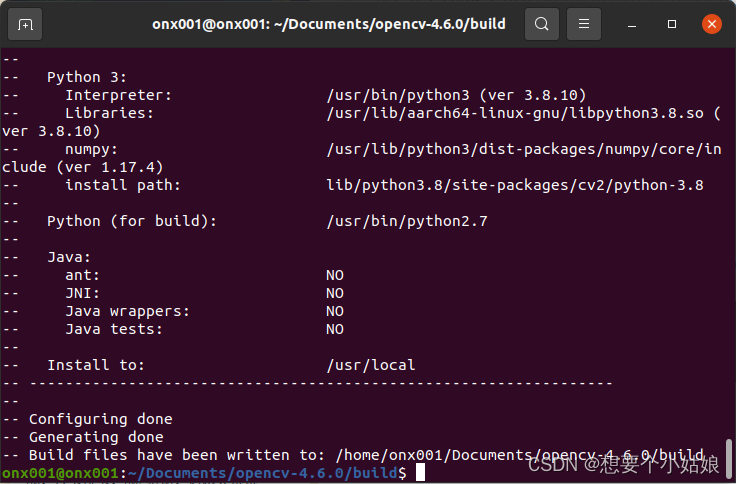
编译完成后如下所示
然后 make install 编译安装 opencv 4.6.0 及其扩展模块 opencv_contrib-4.6.0,电脑性能好的话可以多核编译 make -j8,如果出现兼容性错误的花建议用 make,速度慢一点,终端输入
sudo make install -j8这里编译会很慢,耐心等待,只要一开始没有什么报错后面就不会报错。
经过漫长的等待,最后编译安装完成后如上所示,最后可以打开 jtop 查看带 GPU 加速的 OpenCV 是否已经安装完成,终端输入
jtop
点击最下反的 7 INFO 我们发现 OpenCV: 4.6.0 with CUDA: YES 表示以及安装成功!
三、配置 cv_bridge 功能包
因为 opencv 的数据和 ROS 的数据需要转化,因此需要通过 cv_bridge 这个桥接工具,接下来我们介绍怎么自己下载安装并配置一个自己的 cv_bridge 功能包。
首先,创建一个 ROS 的工作空间
- mkdir -p ~/catkin_pkg/src/
- cd ~/catkin_pkg/src/
然后,下载对应版本的源码,因为是 JetPack 5.1.2 对应 Ubuntu 20.04 因此下载 noetic 版本
GitHub - ros-perception/vision_opencv at noetic
终端输入
git clone https://github.com/ros-perception/vision_opencv.git -b noetic下载完成后因为我们只需要 cv_bridge,所以只需保留 cv_bridge 文件夹,将其放在 ~/catkin_pkg/src/ 目录下,然后修改一下 cv_bridge 的配置文件,终端输入
- cd ~/catkin_pkg/src/cv_bridge/
- gedit ./CMakeLists.txt
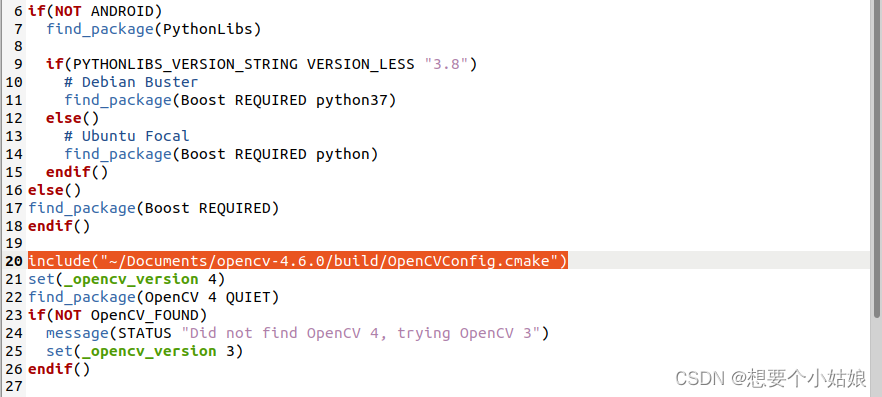
添加自己安装的 带有 GPU 加速的 OpenCV 的 build 文件的路径
include("~/Documents/opencv-4.6.0/build/OpenCVConfig.cmake")添加在 CMakeLists.txt 文件的如下位置,
保存后编译该功能包,终端输入
- cd ~/catkin_pkg/
- catkin_make
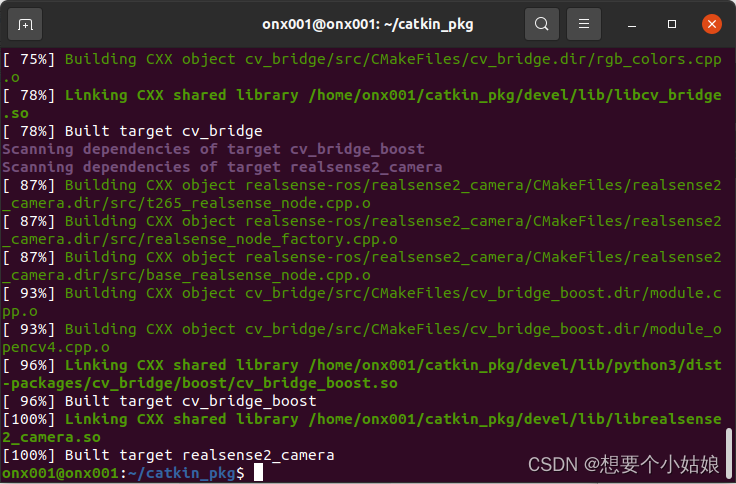
如下结果表明编译成功
编译完成后将其路径添加到 ~/.bashrc 文件中,并刷新环境变量
- echo "source ~/catkin_pkg/devel/setup.bash" >> ~/.bashrc
- source ~/.bashrc
至此,自己的 cv_bridge 功能包就制作完成了,如果需要使用别的版本的 OpenCV,只需将 cv_bridge 中 include("~/Documents/opencv-4.6.0/build/OpenCVConfig.cmake") 修改为相应的路径。
-
相关阅读:
org.apache.commons.lang3.StringUtils工具类使用大全
【C++ Primer Plus】第3章 处理数据
Tauri 2.0.0 beta环境搭建
从零开始利用树莓派+扬声器,实现简单的蓝牙音箱,手机连接放歌
Android学习笔记 4. ImageView
294_C++_报警状态bit与(&)上通道bit,然后检测置位的通道,得到对应置位通道的告警信息,适用于多通道告警,组成string字符串发送
Java中Servlet的生命周期
5-1传输层-传输层提供的服务
麒麟v10服务器安装vnc
第17篇 2D绘图(七)涂鸦板
- 原文地址:https://blog.csdn.net/qq_44998513/article/details/133778446