-
ros学习笔记(二)Vscode中使用Romote远程开发调试Ros2环境
首先,成功安装ros2环境,参考官方文档中的教程,能用运行出来此处的代码
Writing a simple publisher and subscriber (Python) — ROS 2 Documentation: Iron documentation
下载vscode,进行远程开发,具体参考:Vscode进行远程开发-CSDN博客
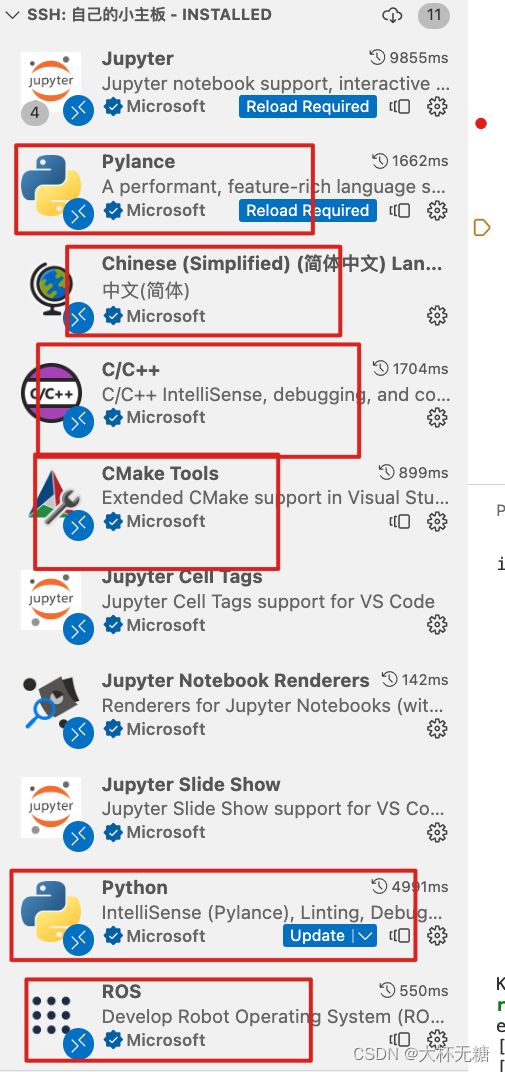
在vscode中安装调试ros2所需要的插件,有Python、Pylance、C/C++、CMake Tools、ROS
其中,安装完ROS插件之后,项目下面的.vscode中会有一个settings.json文件,一般情况下,会自动生成一个配置项
- {
- "ros.distro": "foxy"
- }
我们需要修改一下
- "ros.distro": "foxy",
- "python.autoComplete.extraPaths": [
- "/opt/ros/foxy/lib/python3.8/site-packages", # 这个可以让我们看到rclpy的源代码
- "/opt/audio/robotics_interfaces/install/robotics_interfaces/lib/python3.8/site-packages" # 这个是导入我们自己定义的网络通信的接口
- ],
- "python.analysis.extraPaths": [
- "/opt/ros/foxy/lib/python3.8/site-packages",
- "/opt/audio/robotics_interfaces/install/robotics_interfaces/lib/python3.8/site-packages"
- ],
这些插件安装完成之后,我们已经可以在Vscode中自由跳转Python代码和Ros环境中的rclpy包了,还能查看自己导入的msg、srv 、 action ,如果无法识别,记得source 一下install

然后继续在.vscode创建一个文件launch.json文件
- {
- // 使用 IntelliSense 了解相关属性。
- // 悬停以查看现有属性的描述。
- // 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387
- "version": "0.2.0",
- "configurations": [
- {
- "name": "Python: 当前文件",
- "type": "python",
- "request": "launch",
- "program": "${file}",
- "console": "integratedTerminal",
- "justMyCode": true
- }
- ]
- }
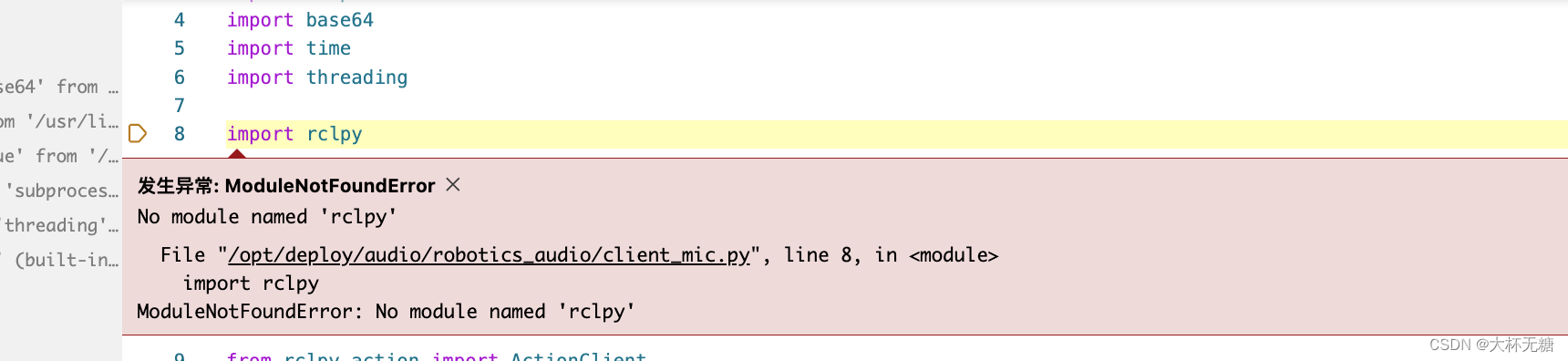
打上断点,开始调试,出现这个问题
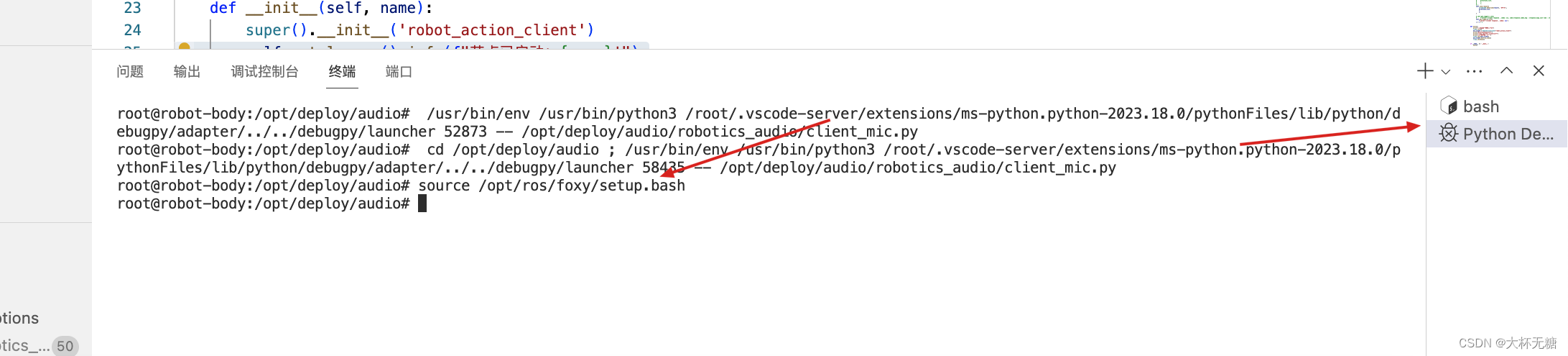
我们需要在刚刚debug的时候启动的终端里面,source一下环境
提示我们自定义的ros interface 找不到
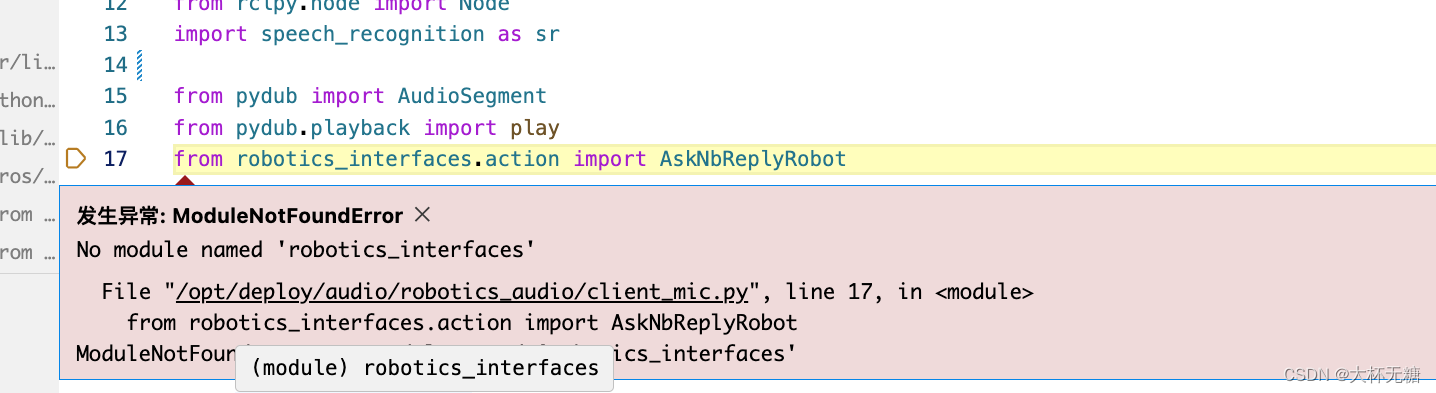 我们也需要source 一下
我们也需要source 一下 
如果 提示导入项目中的包有问题
参考博客:【精选】python找不到包的总结: ImportError: No module named_python import找不到包-CSDN博客
配置好之后重启vscode加载项目,即可
-
相关阅读:
Three.js 进阶之旅:全景漫游-高阶版在线看房 🏡
Paddle Serving v0.9.0 重磅发布多机多卡分布式推理框架
Cloudflare进阶技巧:缓存利用最大化
杂记,主要包含各种锁
ABAP bgRFC
基于JAVA+SpringBoot+Mybatis+Vue+MYSQL的智慧养老管理系统
vue2 项目中引入iconfont
小红书携手HMS Core,畅玩高清视界,种草美好生活
嵌入式学习笔记(52)ADC的引入
某些之前的漏洞的遗忘的记录
- 原文地址:https://blog.csdn.net/sunriseYJP/article/details/133762381
