-
功能定义-前方交通穿行提示&制动
功能概述

前方交通穿行提示(Front Cross Traffic Alert),简称FCTA,其功能表现为在车辆低速前进时,实时监测车辆前部横向接近的其他道路使用者,并在可能发生碰撞风险时发出警告信息前方交通穿行制动(Front Cross Traffic Braking),简称FCTB,其功能表现为在车辆低速前进时,实时监测车辆前部横向接近的其他道路使用者,并在可能发生碰撞风险时自动启用车辆制动系统使车辆减速,以避免碰撞或减轻碰撞后果
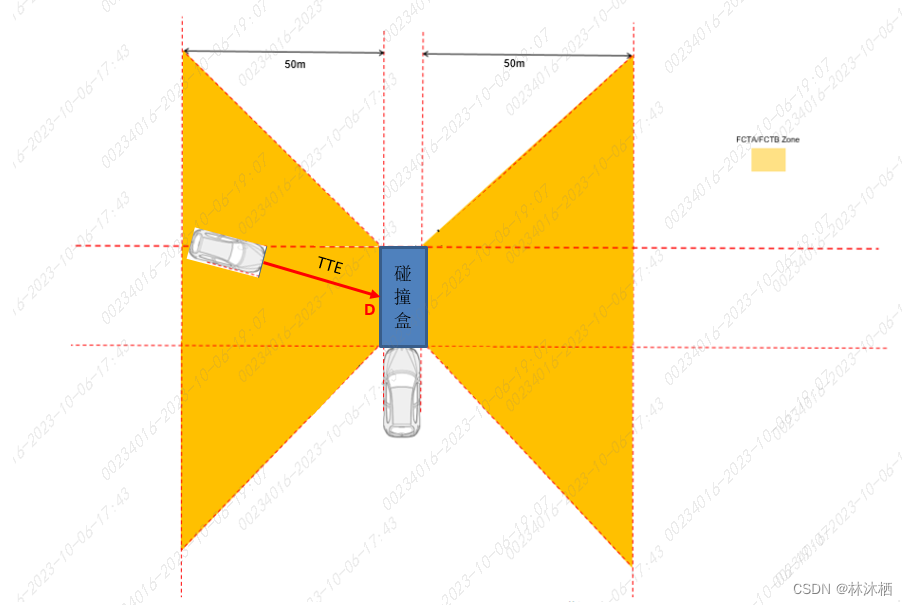
报警区域
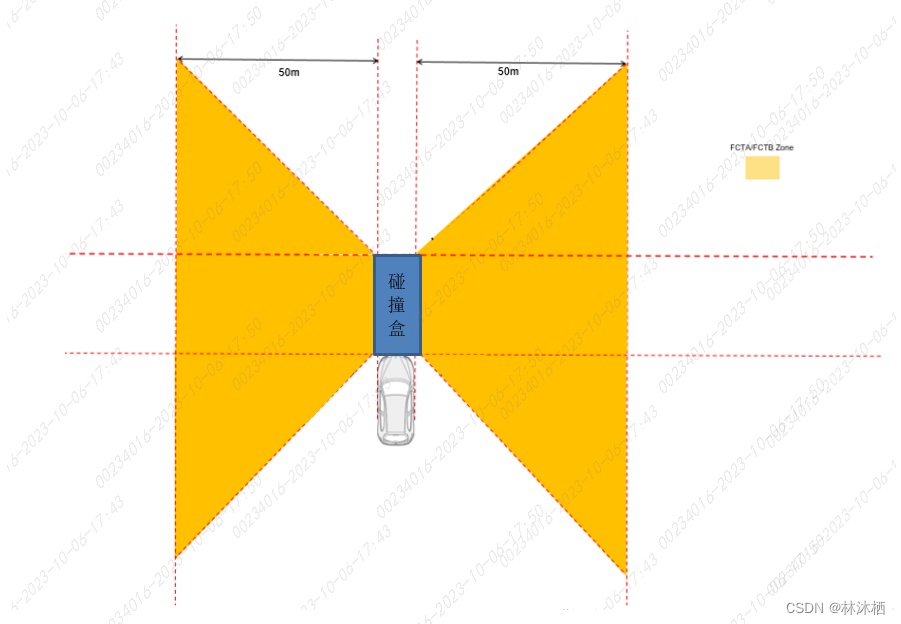
其中:
橙色区域:为报警检测区域
碰撞盒宽度:为车身宽度【不包括外后视镜】;
碰撞盒长度:区分FCTA与FCTB;
——FCTA:6.5m【支持标定】;
——FCTB:FCTB信号发送到ESP响应期间本车的运动距离+ESP响应到执行目标减速度期间本车的运动距离+本车执行目标减速度至完全刹停期间本车的运动距离+预留安全距离【支持标定】设计运行范围
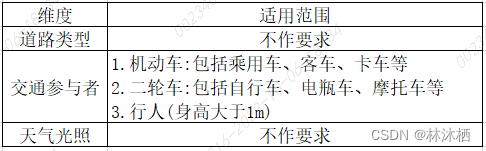
设计运行范围(ODD)表示功能能够正常运行所依赖的外部条件,例如:道路、交通、天气、光照等,详细定义如下:
功能场景
十字路口—前方车辆横穿
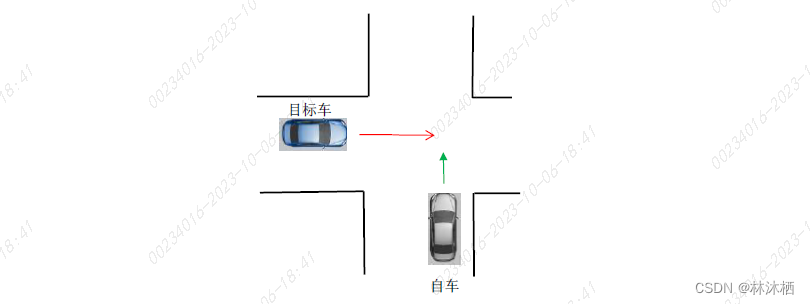
场景描述:自车于十字路口处直行通过,此时侧方出现快速车辆接近,存在碰撞风险,此时系统需给予驾驶员提示或执行减速制动出库过程—前方车辆横穿
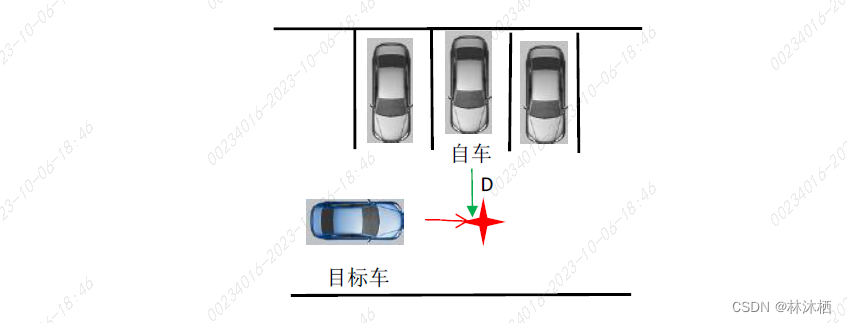
场景描述:自车正在从车位中驶出,此时侧方出现快速车辆接近,存在碰撞风险,此时系统需给予驾驶员提示或执行减速制动
出库【斜列车位】过程—前方车辆横穿
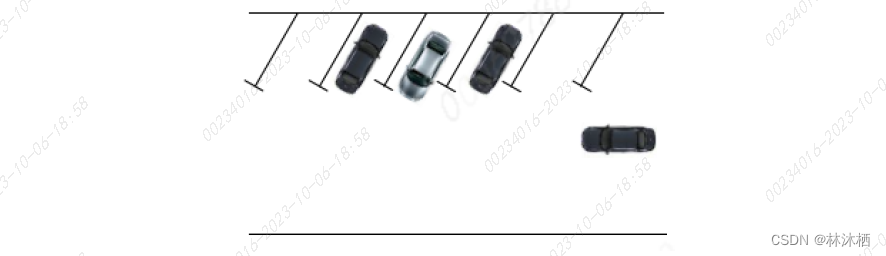
场景描述:自车正在从斜列车位中驶出,此时侧方出现快速车辆接近,存在碰撞风险,此时系统需给予驾驶员提示或执行减速制动功能需求
1.车速范围:1km/h-15km/h
2.挡位要求:D挡
3.报警触发:横穿目标位于检测区域内&横穿目标轨迹与自车轨迹存在交叉点D&交叉点D位于碰撞盒侧边上&TTE≤阈值【FCTA:2.5s;FCTB:1.5s】交互需求
功能开启/关闭

1.允许驾驶员选择关闭/预警/预警+制动;
2.首次默认为预警,后续记忆功能激活
1.FCTA报警:仪表车辆模型前方显示黄色左/右侧横穿动图,文字提示“注意前方左/右侧横穿目标”
2.FCTB报警:仪表车辆模型前方显示红色左/右侧横穿动图,文字提示“注意前方左/右侧横穿目标”,车辆执行减速,同时附加声音报警功能抑制
当存在以下条件之一时,FCTA/FCTB功能将受抑制:
——安全带未系
——四门两盖打开
——ESP功能关闭
——非D挡
——车速不满足要求【1-15km/h】
——ABS/TCS/ESP/EBD功能激活
——关联系统故障功能中断/退出
在功能触发过程中,若存在以下条件,FCTA/FCTB功能将中断/退出:
——存在上述抑制条件
——驾驶员关闭设置项功能故障
1.如果设置项已开启,此时功能故障,文字提示"角雷达类功能故障",同时显示故障指示灯

2.如果设置项未开启,功能故障,系统不会进行提示,若此时驾驶员点击设置项开关,意图打开,此时进行文字提示“功能故障,无法开启”性能要求
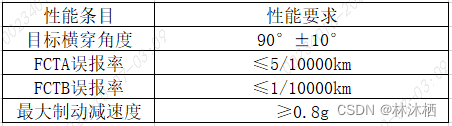
备注:同类功能还有RCTA/RCTB,其表现为后方的预警及制动,与FCTA/FCTB策略基本一致 -
相关阅读:
性能测试 架构层(二) 从性能测试层面了解架构设计 分布式项目实施过程中的常见难点,测试架构层面思考性能测试应该如何做?自行思考解决方案是什么?
大数据计算框架及引擎介绍
open-webui与ollama的部署最后完整之命令
MyBatis大数据量插入方案
Kafka3.0.0版本——消费者(Range分区分配策略以及再平衡)
MySQL的多表间关系
ApiFox 基本使用教程(浅尝辄止,非广)
K-近邻算法的 sklearn 实现
JVM 垃圾回收详解
Java私活500元,做个JavaWeb仓储管理网站(二)
- 原文地址:https://blog.csdn.net/weixin_50875614/article/details/133311336