-
卡尔曼滤波(Kalman Filter)C#测试
一、操作过程
刚学了一下卡尔曼滤波,具体原理还没细看,大致过程如下
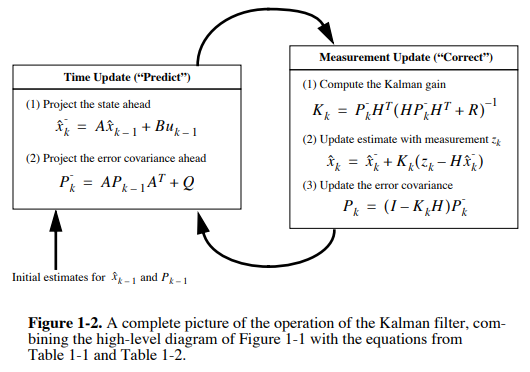
分为两步,第一步Predict,以下两个公式

第二步Correct,以下三个公式
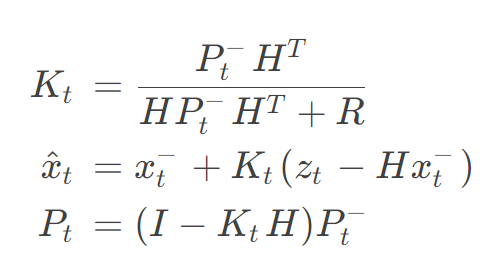
公式看起来很复杂,其中
 是我们要处理的数据,
是我们要处理的数据,  是滤波之后的值,其他一些有些是需要给定的,有些是中间值。
是滤波之后的值,其他一些有些是需要给定的,有些是中间值。从t=1时刻开始,通过第一步,计算得到的值,给到第二步Correct里,第二步的第二个公式得到t=1时刻的
,即为滤波后的值,t=2时刻,再把第二步在t=1时刻的Correct的那些值,代入到第一步Predict里在计算,再Correct,以此往复,得到所有t时刻的值。二、代码实现
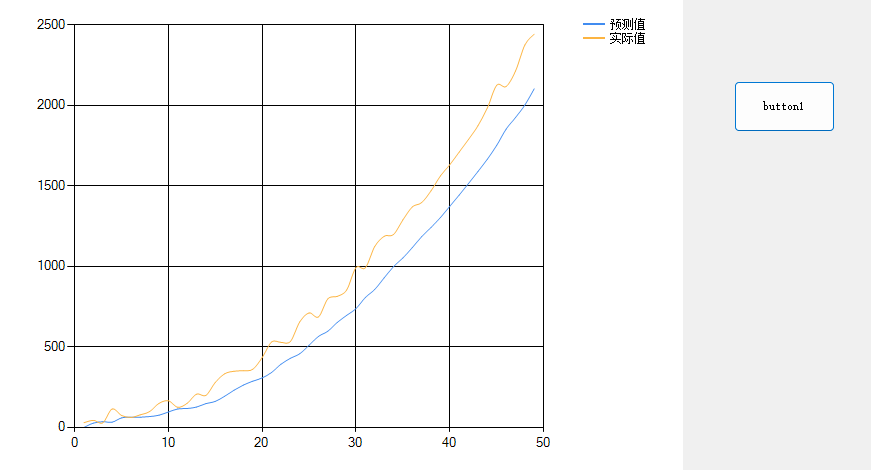
试着用C#编写代码实现了下,实际值用了50个数,大致分布是x的平方加一个(0-100)的随机数,如下图黄色线条。 预测值为蓝色线条。
- void testKF()
- {
- double[] xhat = new double[50]; //x 滤波估计值
- double[] P = new double[50]; //滤波估计值协方差矩阵
- double[] xhatminus = new double[50]; //x 估计值
- double[] Pminus = new double[50]; //估计协方差矩阵
- double[] K = new double[50]; //卡尔曼增益
- double R = 0.1; //测量噪音协方差 R一般可以观测得到,是滤波器的已知条件
- double Q = 0.01; //过程激励噪声协方差(系统过程的协方差)。
- //该参数被用来表示状态转换矩阵与实际过程之间的误差。
- //因为我们无法直接观测到过程信号, 所以 Q 的取值是很难确定的。
- //是卡尔曼滤波器用于估计离散时间过程的状态变量,也叫预测模型本身带来的噪声,状态转移协方差矩阵
- double[] x = new double[50]; //真实值加噪音
- Random r1 = new Random();
- for (int i = 0; i < 50; i++)
- {
- x[i] = i*i + r1.NextDouble()*100;
- }
- P[0] = 1.0;
- xhat[0] = 0.0;
- double A=1,H=1;
- for(int i = 1;i < 50;i++)
- {
- //预测
- xhatminus[i] = A*xhat[i - 1];
- Pminus[i] = A*P[i - 1] + Q;
- //更新
- K[i] = Pminus[i]*H / (H*Pminus[i]*H + R);
- xhat[i] = xhatminus[i] + K[i] * (x[i] - H*xhatminus[i]);
- P[i] = (1 - K[i]*H) * Pminus[i];
- }
- chart1.Series[0].Points.Clear();
- chart1.Series[0].Name = "预测值";
- for (int i = 1; i < xhatminus.Length; i++)
- {
- chart1.Series[0].Points.AddXY(i, xhatminus[i]);
- }
- Series series = new Series();
- series.ChartType = SeriesChartType.Spline;
- series.Name = "实际值";
- for (int i = 1; i < xhatminus.Length; i++)
- {
- series.Points.AddXY(i, x[i]);
- }
- chart1.Series.Add(series);
- }
OK,晚点再细看下原理
-
相关阅读:
[Java] Java 函数式编程
BigCode 背后的大规模数据去重
MySQL锁与脏读、不可重复读、幻读详解
腾讯云云硬盘快速入门-挂载云硬盘
性价比高的照明品牌,五款经济实惠的照明品牌推荐
selenium--关闭窗口,指定窗口大小,前进,后退,刷新等等
关注我,我们一起彻底学会java
从源码彻底理解 Prometheus/VictoriaMetrics 中的 relabel_configs/metric_relabel_configs 配置
idea拉去新建子模块,提交提示此模块处于游离状态
【2022黑马程序员】Mysql索引总结
- 原文地址:https://blog.csdn.net/Isaac320/article/details/133084017
