-
毕业设计|基于stm32单片机的app视频遥控抽水灭火小车设计
基于stm32单片机的app视频遥控抽水灭火水泵小车设计
1、项目简介
1.1 系统构成
本系统采用stm32单片机+esp32 cam wifi摄像头+L298N电机驱动+继电器+水泵+手机app+LED灯设计而成。
1.2 系统功能
- 1、使用手机APP控制小车移动
- 2、在手机APP可以查看小车上的视频
- 3、通过手机APP可以控制水泵、LED的打开与关闭
2、部分电路设计
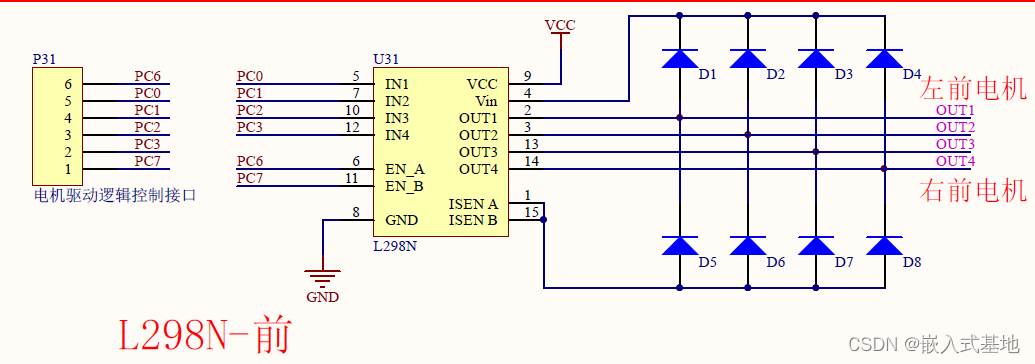
2.1 L298N电机驱动电路设计
L298N使用注意事项:
- 1、当你的驱动电压(上图标识为12V输入,实际可以接受的输入范围是7-12V)为7V-12V的时候,可以使能板载的5V逻辑供电,当使用板载5V供电之后,接口中的+5V供电不要输入电压,但是可以引出5V电压供外部使用。(这种即为常规应用!)
- 2、当驱动电压高于12V,小于等于24V(芯片手册中提出可以支持到35V,但是按照经验一般298保守应用大电压支持到24V已经很了不起!)时,比如要驱动额定电压为18V的电机。首先必须拔除板载5V输出使能的跳线帽。然后在5V输出端口外部接入5V5V使能即 一个电平为5V的控制信号,当此信号输入有效时,且电机驱动模块中电源供电正常时,电机驱动模块输出电流。否则即使电源供电正常,电机上也无电流。电压对L298N内部逻辑电路供电。(这种是高压驱动的非常规应用!)
这里只展示前轮的电机驱动电路图,后轮与前轮一样。
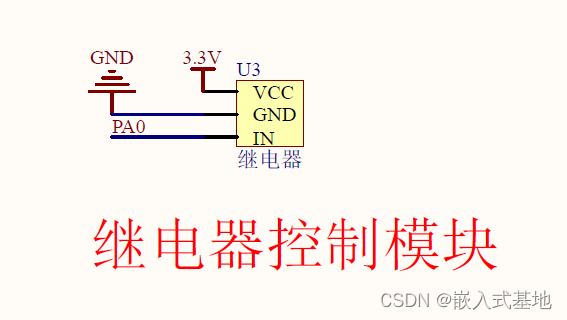
2.2 继电器控制电路设计
电路图如下所示:
3、部分代码展示
3.1 小车控制代码
//占空比 = TIMx_CCRx / TIMx_ARR //moto_r:右轮电机,moto_l:左轮电机. 数值 0-100 void MOTO_PWM_Out_AB(u16 moto_A, u16 moto_B) { TIM_OCInitTypeDef TIM_OCInitSructure; TIM_OCInitSructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitSructure.TIM_OutputState= TIM_OutputState_Enable; //CH1 左前电机-A TIM_OCInitSructure.TIM_Pulse = moto_A;//占空比= ccr/100 TIM_OC1Init(TIM3, &TIM_OCInitSructure);//参数初始化 TIM_OC1PolarityConfig(TIM3, TIM_OCPreload_Enable);//开始输出pwm //CH42 右前电机-B TIM_OCInitSructure.TIM_Pulse = moto_B;//占空比= ccr /100 TIM_OC2Init(TIM3, &TIM_OCInitSructure);//参数初始化 TIM_OC2PolarityConfig(TIM3, TIM_OCPreload_Enable);//开始输出pwm TIM_ARRPreloadConfig(TIM3, ENABLE);//启动自动重装 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
3.1 水泵控制代码
//水泵控制 switch(realy_control) { case 0x0a: //打开水泵 RELAY_ON break; case 0x0b: //关闭水泵 RELAY_OFF break; default: RELAY_OFF //关闭水泵 break; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
4 演示视频及代码资料获取
-
相关阅读:
C++ 修饰符类型
windows server2016 配置JDK环境
HTML5+CSS3基础笔记(上)
10:00面试,10:08就出来了 ,问的实在是太...
宝宝洗衣机买什么样的好?诚意推荐四款实力超群的婴儿洗衣机
Vue.js核心技术解析与uni-app跨平台实战开发学习笔记 第3章 Vue.js生命周期函数 3.1 创建期间生命周期函数
服务间的调用-Feign
代码随想录算法训练营第3天| 203.移除链表元素 、 707.设计链表 、 206.反转链表
基于Vue+webpack之H5打包资源优化
力扣刷题day52|84. 柱状图中最大的矩形
- 原文地址:https://blog.csdn.net/m0_51061483/article/details/133043893
